GP12D夏普红外线传感器
红外线传感器(分析“红外线”文档)共5张PPT
4
应用案例
火焰传感器利用红外线对对火焰非 常敏感的特点,使用特制的红外线 接受管来检测火焰,然后把火焰的 亮度转化为高低变化的电平信号, 输入到中央处理器中,中央处理器 根据信号的变化做出相应的程序处 理。 火焰传感器能够探测到波长在700 纳米~1000纳米范围内的红外光, 探测角度为60°,其中红外光波长 在880纳米附近时候的灵敏度达到 最大。
(2) 利用半导体迁徙现象吸收能量差之光电效果及利用因PN 接合之光电动势效果的量子型。 (量2)子利型用的半优导点体:迁感徙度现高象、吸响收应能快量速差(之μS光之电谱效);果及利用因PN 接合之光电动势效果的量子型。
(热中1)型文将的 名红现红外热象外线俗线型一称传部的为感份焦器优变热外换点效文为应有名热,i,n:其fr藉a中可r热e最d常取t具r出a温代n电s表d动阻u性c值作e者r变原有下化理测及操红辐电外射作动线热,势来器等波进(输T行h长出e数r信依m据号a处l存之B优o热性lo点型m灵e。t敏er)度,高热电堆(Thermopile)及热电(Pyroelectric)元件。 量是子利型 用红的(外波优线点长来:不进感行度同数高感据、处度响理应有的快很一速种(大μ传S之感之器谱变,);化有灵者敏)并度高不等存优点在,,红外造线价传便感器可以控制驱动装置的运行。 (量1)子将型红的外宜优线;点一:部感份度变高换、为响热应,快藉速热(取μS出之电谱阻);值变化及电动势等输出信号之热型。
火焰传感器利用红外线对对火焰非常敏感的特点,使用特制的红外线接受管来检测火焰,然后把火焰的亮度转化为高低变化的电平信号,输入 到中央处理器中,中央处理器根据信号的变化做出相应的程序处理。
(2) 利用半导体迁徙现 量子型 的优点:感度高、响应快速(μS 之谱);
IPF PT98C911 红外激光传感器数据表说明书

PT98C911LASER SENSORS • DIFFUSE REFLECTION SENSORS WITH BACKGROUND SUPPRESSIONsensor laser, diffuse-reflection sensor, 50x41x15mm, Sn: 0-600, 10-30V DC, 2x PNP Anticoincidence, Connector M12 4pin, IP67, Alu-minum+Plastic, 2kHz, Laser diode, red light, Point, Manual adjust-mentMECHANICAL FEATURESAmbient temperature -10 °C ... 50 °CDegree of protection (IP)IP67Design CuboidHousing material AluminumMaterial of optical surface PlasticReflector included in the scope of delivery-Sensor height50 mmSensor length41.4 mmSensor width15 mmStorage temperature -25 °C ... 70 °CVolume MediumWith interchangeable lens-ELECTRICAL FEATURESAlarm output-Decay time0.25 msEquipment protection class Protection class 3High repeat accuracy-Interference suppression-Max. switching distance600 mmNo-load current35 mANumber of pins4Number of switching outputs2Operating voltage 10 V ... 30 VPre-failure message-Rated switching current100 mAReaction time0.25 msResponse time0.25 msReverse polarity protection+Scanning function Light-/dark-on modeSensing range 0 mm ... 600 mmSetting procedure Manual adjustmentShort-circuit protection +ipf electronic gmbh • Rosmarter Allee 14 • 58762 Altena │ Tel +49 2351 9365-0 • Fax +49 2351 9365-19 │www.ipf.de1ELECTRICAL FEATURESSuitable for safety functions-Switching frequency2000 HzType of electrical connection Connector M12Type of switching function AnticoincidenceType of switching output PNPVoltage drop 2.4 VVoltage type DCWith communication interface, RS-232-With LED display+With monitoring function of downstream devices-With other analog output-With restart lock-With time function-OPTICAL FEATURESLight source Laser diode, red lightWavelength of the sensor650 nmLight exit AxialLight beam form PointSmall light beam diameter-Line scanner-Laser class Class 1OTHER FEATURESFeeding technology+For gloss queries+-Is line scan camera2ipf electronic gmbh • Rosmarter Allee 14 • 58762 Altena │ Tel +49 2351 9365-0 • Fax +49 2351 9365-19 │***********•www.ipf.deConnection Dimensional drawingInstallationDisposal Mounting / installation may only becarried out by a qualified electrician!Safety warningsBefore initial operation, please make sure to follow all safety instructions that may be provided in the product information.Never use these devices in applications where the safety of a person depends on their functionality.LED lighting systems can generate intensive UV radiation, which can damage your eyes in case of improper use. The manufacturer cannot be held responsible for damages that result from improper use or connection.ipf electronic gmbh • Rosmarter Allee 14 • 58762 Altena │ Tel +49 2351 9365-0 • Fax +49 2351 9365-19 │***********•www.ipf.de3。
手势控制灯

手势控制灯作者:大姚来源:《中学科技》2018年第04期作为人工智能应用领域中重要的一个方面,智能家居已经越来越受到人们的关注。
人们常常会想象各种“未来之家”的场景:走进房间,灯光自动打开,电视自动播放,空调自动调节……我们相信这些智能设备在不久的将来都不再只是梦想,它们正在逐步成为现实。
现在一些智能产品的实现也变得越来越简单,我们甚至可以自己动手制作一些简单的智能产品了,比如本期介绍的手势控制灯。
Arduino控制器,GP2D120X红外距离传感器,RGB LED灯条,电源适配器,杜邦线,连接端子2套,25cm长的有机玻璃棒和有机玻璃固定板。
GP2D120X红外距离传感器可提供约30cm的精确距离探测,当然也可以测得更远一点的距离,只是精度会变低。
但是由于手势灯对距离精度的要求不高,我们可采用它进行50cm的测距。
该传感器一般用于机器人的测距、避障以及路径规划,是机器视觉及其应用领域的不错选择,而且它还能很好地兼容Arduino(Uno、Mega、Due等)控制器。
其工作电压为4.5—5.5V,输出模拟信号,一共有三个接口,分别是红色的5V电源端、黑色的接地端和橙色信号端。
手势控制灯采用RGB LED灯条。
该灯条是软性灯条,一面是发光的LED线阵颗粒,一面附有3M双面胶,可固定于底板。
灯条长50cm,共有72个LED芯片。
灯条的两头,一头是信号输入端,一头是信号输出端。
输入端有3个接线端,分别是红色的5V电源端、白色的接地端和蓝色的信号输入端。
电源适配器,12V直流输出,输出电流1A。
如果没有12V直流电源,则可以采用7—12V 直流电源,它们都可以给Arduino Uno控制器供电。
1. 将两块有机玻璃固定板用热熔胶连接在一起,构成50cm长的固定板,以匹配LED灯条的长度。
再将LED灯条的背面双面胶撕除,粘贴到有机玻璃固定板上。
接着用热熔胶将两根有机玻璃棒固定在LED灯条的上方。
2. 找一個硬纸板盒子,用美工刀在盒子上面开两个方孔(10mm×5mm),用于通过红外距离传感器和LED灯条的接线端。
粉尘传感器参数
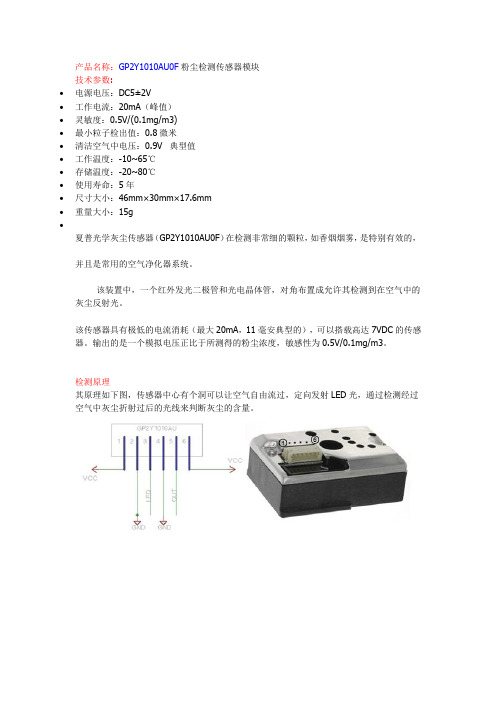
产品名称:GP2Y1010AU0F粉尘检测传感器模块
技术参数:
∙电源电压:DC5±2V
∙工作电流:20mA(峰值)
∙灵敏度:0.5V/(0.1mg/m3)
∙最小粒子检出值:0.8微米
∙清洁空气中电压:0.9V 典型值
∙工作温度:-10~65℃
∙存储温度:-20~80℃
∙使用寿命:5年
∙尺寸大小:46mm×30mm×17.6mm
∙重量大小:15g
∙
夏普光学灰尘传感器(GP2Y1010AU0F)在检测非常细的颗粒,如香烟烟雾,是特别有效的,
并且是常用的空气净化器系统。
该装置中,一个红外发光二极管和光电晶体管,对角布置成允许其检测到在空气中的灰尘反射光。
该传感器具有极低的电流消耗(最大20mA,11毫安典型的),可以搭载高达7VDC的传感器。
输出的是一个模拟电压正比于所测得的粉尘浓度,敏感性为0.5V/0.1mg/m3。
检测原理
其原理如下图,传感器中心有个洞可以让空气自由流过,定向发射LED光,通过检测经过空气中灰尘折射过后的光线来判断灰尘的含量。
暖释电红外线传感器D204S的技术规格书说明书
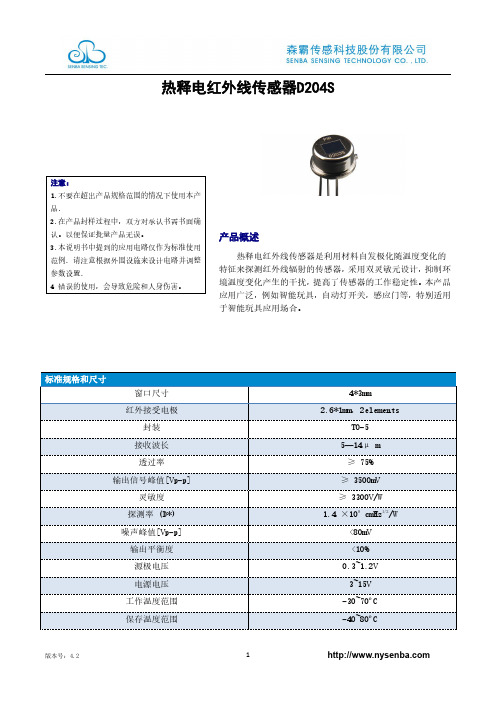
热释电红外线传感器D204S标准规格和尺寸窗口尺寸4*3mm红外接受电极2.6*1mm,2elements封装TO-5接收波长5—14μm 透过率≥75%输出信号峰值[Vp-p]≥3500mV 灵敏度≥3300V/W 探测率(D*) 1.4×108cmHz 1/2/W噪声峰值[Vp-p]<80mV 输出平衡度<10%源极电压0.3~1.2V 电源电压3~15V 工作温度范围-30~70ºC 保存温度范围-40~80ºC注意:1.不要在超出产品规格范围的情况下使用本产品.2.在产品封样过程中,双方对承认书需书面确认。
以便保证批量产品无误。
3.本说明书中提到的应用电路仅作为标准使用范例.请注意根据外围设施来设计电路并调整参数设置.4错误的使用,会导致危险和人身伤害。
产品概述热释电红外线传感器是利用材料自发极化随温度变化的特征来探测红外线辐射的传感器,采用双灵敏元设计,抑制环境温度变化产生的干扰,提高了传感器的工作稳定性。
本产品应用广泛,例如智能玩具,自动灯开关,感应门等,特别适用于智能玩具应用场合。
入射视角图等效电路图输出触发模式测试方法测量条件♦环境温度25ºC♦黑体温度420K(@147˚C)♦调制频率1赫兹,0.3-3.5赫兹△f♦放大倍数72.5dB测量条件双元传感器的灵敏平衡度是通过测量每个单元的灵敏度(即单个输出峰值电压),并采用下列公式计算得出。
平衡度=|VA-VB|/(VA+VB)×100%VA=A面的灵敏度(mVp-p)VB=B面的灵敏度(mVp-p)典型应用电路注意:U1A-D:LM324电源:12VDCRs=47KΩ,作为参考电压设置电阻模拟PIR+数字芯片典型应用模拟PIR+数字芯片(ISB01)应用参考图注意事项一、电路设计方面1.PIR与其他器件的连线要越短越好,双面板或多层板上,该连线下方尽量不要走线,尤其是不能有大电流的走线。
e18-d80nk红外传感器检测原理

e18-d80nk红外传感器检测原理
E18-D80NK红外传感器是一种常见的非接触式传感器,可用于检测物体的存在或距离。
其工作原理是基于红外线的反射和接收。
下面将详细介绍其检测原理。
该传感器由发射器和接收器两部分组成。
发射器使用一个红外二极管发射红外线,被检测物体反射一部分光线到接收器。
接收器内置一个红外光敏二极管,接收被反射的光线,并将其转化为电信号。
通过测量接收器输出的电信号,即可确定被检测物体的存在和距离。
当物体接近传感器时,被反射的光线的强度增加,接收器输出的电信号也随之增强。
通过对输出信号的测量,可以确定物体与传感器的距离。
该传感器具有高精度,测距范围为5mm至80cm,测距误差仅为±1mm。
除了距离测量外,E18-D80NK红外传感器还可用于检测物体的存在和移动。
当物体靠近传感器时,被反射的光线被接收器捕获,从而触发器件输出一个信号,表明检测到了物体的存在。
当物体移动过传感器时,反射光线的强度会发生变化,从而导致接收器输出的信号发生变化。
总之,E18-D80NK红外传感器是一种可靠的非接触式传感器,可以用于检测物体的存在、距离和移动等信息。
其工作原理基于红外线的反射和接收,具有高精度和稳定性。
红外BISS0001

开关技术:热释电红外控制开关本例介绍一款采用热释电红外传感器(一种由高热电系数材料、阻抗匹配用场效应晶体管的滤光镜片等组成的新型敏感元件)和专用集成电路制作的热释电红外线控制开关,它在检测到人体发射的红外传感器信号后接通,使负载(报警器或照明灯、排风扇等)通电工作。
电路工作原理该热释电红外控制开关电路由热释红外传感器(PIR)、热释电红外控制电路、光控电路和控制执行电路组成,如图3-66所示。
热释电红外控制电路由集成电路lC(SS0001)和电阻器RZ-R9、电容器Cl-C8组成。
SS0001是热释电红外控制专用集成电路,其内部由输入放大器、双向限幅器、状态控制器、延时定时器、锁存定时器和基准电源等电路组成,如图3-67所示。
光控电路由光敏电阻器RG、电阻器Rl和IC第9脚内电路组成。
控制执行电路由电阻器RlO、晶体管V、二极管VD和继电器K组成。
热释电红外传感器应与非涅尔透镜配合使用,才能提高其灵敏度。
在热释电红外传感器未检测到人体红外线信号时,IC的2脚输出低电平,V处于截止状态,K不吸合,负载电路不工作。
当有人在热释电红外传感器的有效检测区域内活动时,热释电红外传感器将接收到人体发出的红外信号,并将其转变成微弱的脉冲电压信号,此电压信号经lC内电路放大、鉴幅处理及定时控制后,从2脚输出控制高电平,使V导通,K吸合,负载电路通电工作。
在白天,光敏电阻器RG受光照射而呈低阻状态,IC的9脚(触发禁止端)被锁定为低电平,使IC的2脚恒定输出低电平。
夜晚,RG因无光照射而呈高阻状态,IC的g脚恢复为高电平,热释电红外控制开关又迸人警戒状态。
若想该热释电红外控制开关白天、晚上均工作,可将RG去掉或在Rl两端并接一只小开关。
元器件选择Rl-RlO选用1/4W碳膜电阻器或金属膜电阻器。
RG选用亮阻小于2OkΩ、暗阻大于2MΩ的光敏电阻器。
Cl、C2和C6均选用耐压值为16V的铝电解电容器;C3-C5、C7和C8均选用独石电容器或涤纶电容器。
热释电红外传感器原理

热释电红外传感器原理
热释电红外传感器利用物体的红外辐射特性实现对目标物体的检测与监测。
它的工作原理基于热释电效应,即当物体处于不同温度时,会发射出不同强度的红外辐射。
热释电红外传感器的核心部件是由热释电材料制成的探测器。
这种材料能够感应并吸收周围环境中的红外辐射能量。
当被探测的目标物体进入传感器的检测范围内时,目标物体会通过发射红外辐射来改变周围环境的温度分布。
探测器会感知到这种变化,并将其转化为电信号输出。
热释电红外传感器通常还配备有补偿元件和信号处理电路。
补偿元件用于自动调整探测器的温度,以排除环境温度的影响。
信号处理电路则负责处理探测器输出的电信号,将其转化为可读的数字信号或控制信号。
当有人或物体进入传感器的感应范围时,热释电红外传感器会发出警报信号或触发其他相应的操作。
由于其灵敏度高、响应快,以及对环境光和声音的抵抗能力强,因此热释电红外传感器被广泛应用于安防系统、自动化控制以及简单的人体检测等领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Arduino&GP2D12红外线测距传感器
[ 2008/6/14 19:50:00 | By: wxxmickey ]
3
推荐
最近忙生活琐事,很少搞这些小东东,今天闲了一下就发表一个Arduino控制GP2D12的小实例,仅供大家参考!
器材:Arduino开发板,GP2D12,1602字符液晶,连接线若干。
Arduino开发板和1602字符液晶我就不多介绍了,前面都提到过。
GP2D12是日本SHARP公司生产的红外距离传感器,价格便宜,测距效果还不错,主要用于模型或机器人制作。
技术规格如下:
探测距离:10-80cm
工作电压:4-5.5V
标准电流消耗:33-50 mA
输出量:模拟量输出,输出电压和探测距离成比例
从曲线图中我们可以看出,输出电压并非是线性的,所以这个测距也就只能测个大概,如果要精度高的话就
需要做非线性校正,这里我们就不讨论这个问题了。
实验原理:
GP2D12根据距离的远近输出相应的电压,经Arduino开发板0号模拟口输入,转换成数字量,根据公式计算得到需要显示的数据。
实验原理图:
实验实物图:
没有障碍物,显示范围超出。
有障碍物时显示测量距离。
经实验,需要在GP2D12的电源端加个10UF以上的电解电容,稳定供电电压,以保证输出模拟电压更稳定。
实验代码:
/********************************************************************/
int GP2D12=0;
int ledpin = 13;
int LCD1602_RS=12;
int LCD1602_RW=11;
int LCD1602_EN=10;
int DB[] = {6, 7, 8, 9};
char str1[]="";
char str2[]="Renge:00cm";
char str3[]="Renge Over";
/********************************************************************/
/********************************************************************/
void LCD_Command_Write(int command)
{
int i,temp;
digitalWrite( LCD1602_RS,LOW);
digitalWrite( LCD1602_RW,LOW);
digitalWrite( LCD1602_EN,LOW);
temp=command & 0xf0;
for (i=DB[0]; i <= 9; i++)
{
digitalWrite(i,temp & 0x80);
temp <<= 1;
}
digitalWrite( LCD1602_EN,HIGH);
delayMicroseconds(1);
digitalWrite( LCD1602_EN,LOW);
temp=(command & 0x0f)<<4;
for (i=DB[0]; i <= 10; i++)
{
digitalWrite(i,temp & 0x80);
temp <<= 1;
}
digitalWrite( LCD1602_EN,HIGH);
delayMicroseconds(1);
digitalWrite( LCD1602_EN,LOW);
}
/********************************************************************/ void LCD_Data_Write(int dat)
{
int i=0,temp;
digitalWrite( LCD1602_RS,HIGH);
digitalWrite( LCD1602_RW,LOW);
digitalWrite( LCD1602_EN,LOW);
temp=dat & 0xf0;
for (i=DB[0]; i <= 9; i++)
{
digitalWrite(i,temp & 0x80);
temp <<= 1;
}
digitalWrite( LCD1602_EN,HIGH);
delayMicroseconds(1);
digitalWrite( LCD1602_EN,LOW);
temp=(dat & 0x0f)<<4;
for (i=DB[0]; i <= 10; i++)
{
digitalWrite(i,temp & 0x80);
temp <<= 1;
}
digitalWrite( LCD1602_EN,HIGH);
delayMicroseconds(1);
digitalWrite( LCD1602_EN,LOW);
}
/********************************************************************/ void LCD_SET_XY( int x, int y )
{
int address;
if (y ==0) address = 0x80 + x;
else address = 0xC0 + x;
LCD_Command_Write(address);
}
/********************************************************************/ void LCD_Write_Char( int x,int y,int dat)
{
LCD_SET_XY( x, y );
LCD_Data_Write(dat);
}
/********************************************************************/ void LCD_Write_String(int x,int y,char *s)
{
LCD_SET_XY( x, y ); //设置地址
while (*s) //写字符串
{
LCD_Data_Write(*s);
s ++;
}
}
/********************************************************************/ void setup (void)
{
int i = 0;
for (i=6; i <= 13; i++)
{
pinMode(i,OUTPUT);
}
LCD_Command_Write(0x28);//4线2行2x7
delay(50);
LCD_Command_Write(0x06);
delay(50);
LCD_Command_Write(0x0c);
delay(50);
LCD_Command_Write(0x80);
delay(50);
LCD_Command_Write(0x01);
}
/********************************************************************/ void loop (void)
{
int tmp;
cahr val;
char i,a,b;
LCD_Command_Write(0x02);
delay(50);
LCD_Write_String(1,0,str1);
delay(50);
LCD_Write_String(3,1,str2);
delay(50);
while(1)
{
tmp = analogRead(GP2D12);
if (tmp < 3)return -1;
val=(6787.0 /((float)tmp - 3.0)) - 4.0;
if(val>80||val<10)
{
LCD_Write_String(3,1,str3);
}
else
{
LCD_Write_String(3,1,str2);
a=0x30+val/10;
b=0x30+val%10;
LCD_Write_Char(9,1,a);
LCD_Write_Char(10,1,b);
}
delay(500);
}
}。