PLC定时、计数器指令(LG)
LGplc应用指令手册
第五章应用指令5.1 数据传送指令5-15.1.1 MOV, MOVP, DMOV, DMOVP ..................................................... 5-15.1.2 CMOV, CMOVP, DCMOV, DCMOVP .......................................... 5-35.1.3 GMOV, GMOVP .................................................................................. 5-65.1.4 FMOV, FMOVP ................................................................................... 5-85.1.5 BMOV, BMOVP ................................................................................ 5-10 5.2 转换指令5-125.1.1 BCD, BCDP, DBCD, DBCDP ......................................................... 5-125.2.2 BIN, BINP, DBIN, DBINP .............................................................. 5-15 5.3 比拟指令5-185.3.1 CMP, CMPP, DCMP, DCMPP ...................................................... 5-185.3.2 TCMP, TCMPP, DTCMP, DTCMPP .............................................. 5-225.3.3 LD ( =, >, <, >=, <=, <> ) ..................................................... 5-245.3.4 AND ( =, >, <, >=, <=, <>) ................................................... 5-255.3.5 OR ( =, >, <, >=, <=, <>) ...................................................... 5-27 5.4 增加/减少运算5-295.4.1 INC, INCP, DINC, DINCP ............................................................. 5-295.4.2 DEC, DECP, DDEC, DDECP .......................................................... 5-31 5.5 回转指令5-345.5.1 ROL, ROLP, DROL, DROLP .......................................................... 5-345.5.2 ROR, RORP, DROR, DRORP ....................................................... 5-375.5.3 RCL, RCLP, DRCL, DRCLP ............................................................ 5-395.5.4 RCR, RCRP, DRCR, DRCRP .......................................................... 5-425.6 移位指令5-445.6.1 BSFT, BSFTP ...................................................................................... 5-445.6.2 WSFT, WSFTP ................................................................................... 5-465.6.3 SR.......................................................................................................... 5-48 5.7 交换指令5-515.7.1 XCHG, XCHGP, DXCHG, DXCHGP ............................................ 5-51 5.8 BIN 算术指令5-535.8.1 ADD, ADDP, DADD, DADDP ...................................................... 5-535.8.2 SUB, SUBP, DSUB, DSUBP .......................................................... 5-555.8.3 MUL, MULP, DMUL, DMULP ..................................................... 5-575.8.4 MULS, MULSP, DMULS, DMULSP ............................................ 5-605.8.5 DIV, DIVP, DDIV, DDIVP ............................................................... 5-635.8.6 DIVS, DIVSP, DDIVS, DDIVSP .................................................... 5-65 5.9 BCD算术指令5-685.9.1 ADDB, ADDBP, DADDB, DADDBP ........................................... 5-685.9.2 SUBB, SUBBP, DSUBB, DSUBBP ................................................ 5-705.9.3 MULB, MULBP, DMULB, DMULBP ........................................... 5-745.9.4 DIVB, DIVBP, DDIVB, DDIVBP ................................................... 5-76 5.10 逻辑算术指令5-795.10.1 WAND, WANDP, DWAND, DWANDP ..................................... 5-795.10.2 WOR, WORP, DWOR, DWORP ................................................. 5-825.10.3 WXOR, WXORP, DWXOR, DWXORP ....................................... 5-845.10.4 WXNR, WXNRP, DWXNR, DWXNRP ...................................... 5-86 5.11 数据处理指令5-885.11.1 SEG, SEGP ......................................................................................... 5-895.11.2 ASC, ASCP ......................................................................................... 5-925.11.3 BSUM, BSUMP, DBSUM, DBSUMP .......................................... 5-945.11.4 ENCO, ENCOP .................................................................................. 5-975.11.5 DECO, DECOP ................................................................................ 5-1005.11.6 FILR, FILRP, DFILR, DFILRP ....................................................... 5-1025.11.7 FILW, FILWP, DFILW, DFILWP .................................................. 5-1055.11.8 DIS, DISP ......................................................................................... 5-1075.11.9 UNI, UNIP ........................................................................................ 5-1105.11.10 IORF, IORFP .................................................................................... 5-112 5.12 系统指令5-1145.12.1 FALS ................................................................................................... 5-1145.12.2 DUTY ................................................................................................. 5-1155.12.3 WDT, WDTP .................................................................................... 5-1185.12.4 OUTOFF ............................................................................................ 5-1205.12.5 STOP .................................................................................................. 5-121 5.13 跳转指令5-1225.13.1 JMP, JME .......................................................................................... 5-1225.13.2 CALL, CALLP, SBRT, RET ............................................................ 5-124 5.14 循环指令5-1265.14.1 FOR, NEXT ...................................................................................... 5-1275.14.2 BREAK ............................................................................................... 5-128 5.15 标志指令5-1295.15.1 STC, CLC ........................................................................................... 5-1295.15.2 CLE ..................................................................................................... 5-131 5.16 特殊模块指令5-1325.16.1 GET, GETP ........................................................................................ 5-1335.16.2 PUT, PUTP ....................................................................................... 5-135 5.17 数据连接指令5-1375.17.1 READ ................................................................................................. 5-1385.17.2 WRITE ................................................................................................ 5-1415.17.3 RGET .................................................................................................. 5-1435.17.4 RPUT .................................................................................................. 5-1475.17.5 STATUS .............................................................................................. 5-150 5.18 中断指令5-1525.18.1 EI, DI .................................................................................................. 5-1525.18.2 TDINT, IRET ..................................................................................... 5-1535.18.3 INT, IRET .......................................................................................... 5-1555.19 符号反转指令5-1565.19.1 NEG, NEGP, DNEG, DNEGP...................................................... 5-156 5.20 位接触指令5-1595.20.1 BLD, BLDN ....................................................................................... 5-1595.20.2 BAND, BANDN .............................................................................. 5-1605.20.3 BOR, BORN ..................................................................................... 5-1615.20.4 BOUT ................................................................................................. 5-1635.20.5 BSET, BRST ...................................................................................... 5-164 5.21 计算机连接模块指令5-1655.21.1 SND .................................................................................................... 5-1655.21.2 RCV .................................................................................................... 5-166 5.22 高速计数器指令5-1675.22.1 HST ..................................................................................................... 5-1675.22.2 HSC .................................................................................................... 5-170 5.23 RS-485 通讯指令5-1715.23.1 RECV .................................................................................................. 5-1725.23.2 SEND ................................................................................................. 5-1735应用指令5.1.1MOV, MOVP, DMOV, DMOVP1)功能-MOV(P) : 传送在[ S ]中的16位数据至指定的设备[ D ].16 位- DMOV(P) : 传送在指定设备[ S+1, S ]中的32位数据到指定的设备[ D+1, D ].-2) 编程举例在P020检测到一个上升沿,‘h70F3’被传送到P04。
PLC定时器与计数器的应用

定时器的计时精度决定了其控制精度,是PLC 实现精确控制的重要元件之一。
PLC计数器介绍
计数器是PLC中用于对输入脉冲进行计数的元件。
计数器可以用于各种应用,如控制步进电机、检 测生产线上的产品数量等。
紧急情况处理
在遇到交通事故或其他紧急情况 时,PLC定时器和计数器能够快速 响应,调整信号灯的控制逻辑, 保障救援车辆的优先通行权。
THANKS FOR WATCHING
感谢您的观看
计数器通常有预置值,当计数值达到预置值时, 计数器会触发相应的输出信号。
PLC定时器与பைடு நூலகம்数器的关系
定时器和计数器都是PLC中的 控制元件,但它们的应用场景
和功能不同。
定时器主要用于时间控制, 而计数器主要用于计数控制。
在某些应用中,可以将计数器 的计数值作为定时器的设定值, 从而实现基于计数的定时控制。
创建定时器和计数器
在编程软件中创建定时器和计数器, 并为其分配相应的输入和输出信号。
编写定时器和计数器程序
根据实际需求编写定时器和计数器的 程序,包括设置时间参数、计数逻辑 等。
调试与测试
对编写的程序进行调试和测试,确保 定时器和计数器能够按照预期工作。
定时器与计数器的编程实例
定时器实例
实现一个周期性自动启动的设备,如 每隔10秒启动一次的泵。
02
PLC定时器的应用
定时器类型与原理
01
02
03
接通延时型
在输入信号作用下,定时 器输出信号开始接通,直 到达到设定时间后,输出 信号才断开。
plc定时器计数器使用指令
实验四定时器、计数器指令应用
实验目的:
熟悉定时器、计数器指令的功能;
掌握定时器、计数器指令的基本应用方法;
能用定时器、计数器及逻辑指令完成较为复杂过程的控制。
实验设备:
GE PACsystem RX3i可编程控制器实验台一台
计算机一台
网线一根
实验内容:
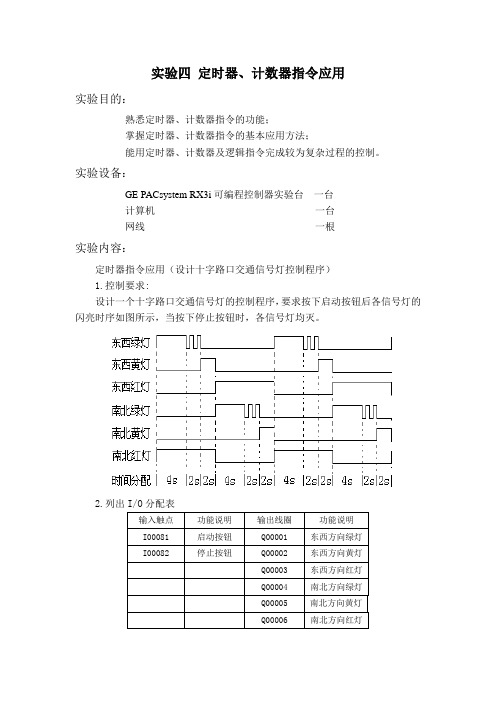
定时器指令应用(设计十字路口交通信号灯控制程序)
1.控制要求:
设计一个十字路口交通信号灯的控制程序,要求按下启动按钮后各信号灯的闪亮时序如图所示,当按下停止按钮时,各信号灯均灭。
2.列出I/O分配表
输入触点功能说明输出线圈功能说明
I00081 启动按钮Q00001 东西方向绿灯
I00082 停止按钮Q00002 东西方向黄灯
Q00003 东西方向红灯
Q00004 南北方向绿灯
Q00005 南北方向黄灯
Q00006 南北方向红灯
3.填写编码表
4.编写程序
思考:1.运行程序,会发现绿灯闪烁的过程看不出来,试通过修改定时时间来使效果更加明显。
2.记录在设计过程中出现的问题及解决方法,并对结果进行分析。
PLC基本指令(LG)

Company Logo
3
编程举例
程序A
反转指令
P020
P021
P022
P023
P024
程序B
P020 P021 P022 P023 P024
Company Logo
( P060 ) ( P060 )
4
主控制指令
Company Logo
MCS, MCSCLR
❖当MCS指令的On/Off 命令接通时,在 MCS 和同MCS 指令具有相同嵌套数的 MCSCLR 指令之间的顺序程序将执行。
❖ 包含在MCS ~ MCSCLR 块中的指令(FOR, NEXT, EI, DI, etc.)如果在它前面不用立即加 上触点指令, CPU 不管MCS 指令的On/Off 命令状态如何将执行指令。
4
主控制指令
Company Logo
具有共同线路的电路 (MCS, MCSCLR指令举例)
[ 继电器电路 ]
Company Logo
[ MCS 0 ] ( P060 )
( P061 ) [ MCS 1 ]
( P062 ) ( P063 )
[ MCSCLR 0 ]
[ END
]
MCS 0 块 MCS 1 块
使用 2个主控制块(MCS 0 and MCS 1),如果用MCSCLR 0 指令清除它们, MCS 1 块将自动被清除。
0)
1)
2)
1
编程举例
P020 P021
( P061 )
OR S
当P020 和 P021中的任意一个接通时,P061触点接通。
2
连接指令
Company Logo
1、AND LOAD ❖ 块A和块B执行AND运算,使用它 为运算结果。 ❖ AND LOAD 指令可以连续写7 次。
lg产电PLC学习技巧

LG 产电PLC 学习技巧LS 产电K7M 系列PLC 编程元件/指令适应初学者的资料浓缩版一、LS 产电K7M 系列编程器的编程元件配置表(表1-1):K120S K200S (K80S )K300S K1000S 备注程序容量10k (2k )步7k 步15k 步30k 步P (输入/输出继电器)(按十六进制编号)P000-P063F 1024点P000-P031F 512点P000-P063F 1024点P000-P063F 1024点带扩展M (辅助继电器)M000-M191F (3072点)K (保护继电器)K000-K031F (512点)L (连接继电器)L0003-L06F (1024点)F (特殊继电器)F000-F062F (1024点)S (步进控制器)S00.00-S99.99(100×100步)T (定时器)100msT00-T191192点范围可设定5种类型10msT192-T25564点C (计数器)C000-C255256点四种类型D (数据寄存器)D000-D4*******字D0000-D999910000字整数范围1、有符号指令16位:-32768∽32767;32位:-2147483648∽21474836472、无符号指令16位:00000∽65535;32位:00000000∽4295967295同其它PLC 一样,K7M 系列PLC 是输入/输入继电器、M/K/L/F 等辅助继电器、定时器、计数器、数据寄存器和步进控制器等几类编程元件。
用编程指令对这些元件进行操作和控制,即所谓编程了。
输入、输出继电器,严格的对应输入/输出I/O 点,随PLC 的型号不同而数量有异;而辅助继电器的数量和工作方式,大致相同,并不随PLC 型号不同而有异;这类继电器,同继电控制线路中的继电器用法是相同的。
但其触点数量却是无穷尽的,不必担心不够用;定时器,相当于通电延时动作的普通时间继电器,触点个数也是无限制的;数据寄存器,是能储存数据的东东,一般的控制线路中,就没有这类元件了;步进控制器,其实是编程方法的一种,便于速成和编程效率型号种类类比较高;另外,即是数制的问题,PLC内部电路对数制的处理方式都是二进制的,但输入/输出方式多为八进制和十六进制的。
PLC定时器与计数器的应用
PLC技术在典型任务中的应用
任务一 电动机间歇运行控制
二、任务实施 STEP 1:任务分析
可以看出,合上控制开关SA后,电动机5秒后开始运转, 10秒后停止运行。 电动机就这样停止5秒,运转10秒,周而复始地间歇运行下去,只有断开控制 开关SA后,电动机才会停止运转。电动机的运行时间和停止时间都可以由定 时器的设定值控制,下面就应用定时器指令完成电动机间歇运行的控制。
1.纵道交通灯的运行控制程序
第 35 页
PLC技术在典型任务中的应用
任务二 十字路口交通灯控制
二、任务实施 STEP 3:程序编制
2.横道交通灯的运行控制程序
第 36 页
PLC技术在典型任务中的应用
任务二 十字路口交通灯控制
二、任务实施 STEP 3:程序编制
2.横道交通灯的运行控制程序
第 37 页
二、任务实施 STEP 3:程序编制
1.纵道交通灯的运行控制程序
第 33 页
PLC技术在典型任务中的应用
任务二 十字路口交通灯控制
二、任务实施 STEP 3:程序编制
1.纵道交通灯的运行控制程序
第 34 页
PLC技术在典型任务中的应用
任务二 十字路口交通灯控制
二、任务实施 STEP 3:程序编制
第 19 页
PLC技术在典型任务中的应用
任务一 电动机间歇运行控制
二、任务实施 STEP 2:任务准备
PLC输入输出接线如图
SA
KM
PLC
SIEMENS CPU226AC/DC/ RLY
DC24V 电源进线
AC220V 电源进线
第 20 页
PLC技术在典型任务中的应用
任务一 电动机间歇运行控制
3PLC、计数器指令
知识点2:计数器指令
3.4 定时器与计数器指令 3.4.2 计数器指令 (加减计数器 )
CTUD,增减计数器指令。有两个脉冲输入端:CU输 入端用于递增计数,CD输入端用于递减计数。
LD I0.1 LD I0.2 LD I0.3 CTUD C50,+4 LD C50 = Q0.0
山东铝业职业学院电气系
山东铝业职业学院电气系
知识点2:梯形图的基本电路
(2) 大容量计数电路
S7200系列PLC中16 位计数器最大计数 范围为32767,当 计数值远远大于该 值时,可采用32位 计数器,也可将两 个16位计数器串级 相连,得到一个大 容量计数值。
山东铝业职业学院电气系
可编程控制器梯形图设计规则
1.触点的安排 梯形图的触点应画在水平线上,不能画在垂直分支上。 2.串、并联的处理 在有几个串联回路相并联时,应将触点最多的那个串 联回路放在梯形图最上面。在有几个并联回路相串联时, 应将触点最多的并联回路放在梯形图的最左面。 3.线圈的安排 不能将触点画在线圈右边,只能在触点的右边接线圈。
山东铝业职业学院电气系ห้องสมุดไป่ตู้
可编程控制器梯形图设计规则
4.不准双线圈输出 如果在同一程序中同一元件的线圈使用两次或多次,则称为双 线圈输出。这时前面的输出无效,只有最后一次才有效,所以不应 出现双线圈输出。 5.重新编排电路 如果电路结构比较复杂,可重复使用一些触点画出它的等效电 路,然后再进行编程就比较容易。 6.编程顺序 对复杂的程序可先将程序分成几个简单的程序段,每一段从最 左边触点开始,由上之下向右进行编程,再把程序逐段连接起来。
知识点2:计数器指令
3.4 定时器与计数器指令 3.4.2 计数器指令 (加减计数器 )
定时器和计数器指令
★ 定时器的功能
① 当执行条件ON时开始减1定时,定时过程中执行条 件要保持ON。 ② 定时时间到,定时器ON、其所属触点动作。此后 只要执行条件保持ON , 其ON状态保持。
③ 当扫描时间Ts >0.1秒时,TIM会不准确; 当Ts > 0.01秒时,TIMH会不准确。
④ 定时器ON后,若执行条件OFF,定时器复位。 ⑤ 定时器ON后,若PLC断电,定时器复位。 触点复位:触点恢复到没有通电状态
复位状态:
设定值复位: 恢复成初始值
★定时器定时功能例(1) 分析程序对线圈01000的控制
00000对应启动按钮、00001对应停车按钮 。 按下启动按钮 → 线圈00000ON→
闭合 00000 00001
20000
触点00000闭合→
触点20000闭合→
线圈20000ON→
20000 20000
★ CNT的计数功能举例
分析程序对01000的控制作用。 00000每通断一次,向CNT000输入一个计数脉冲。 00000通断3次→ CNT000 ON→ CNT000 复位→ 线圈01000 OFF 线圈01000 ON
闭合 00000 00001
CP
CNT 000 #0003
此后若触点00001 ON→
00000
KEEP HR0000 00001 HR0000 TIM000 01000 00000 00001 10S
TIM000 #0050
HR0000 01000 5S 5S
2. 计数器指令CNT
格式: CNT N SV
R SV
符号 CP CNT N
N:000~255
SV :BCD 0 ~ 9999
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P020 T000 T000 C000 C000 P060
P021
[ TMR T000 36000 ] [ RST T000 ]
U CTU C000 R < s > 00100
( P060 )
1 小时定时器 计数器 (1小时×100 = 100小时)
·
31
定时器指令
Company Logo
4、 TMON 单稳态定时器
一个闪烁的灯 (TON指令举例 )
[梯级图程序]
利用2个定时器和 P020控制灯周期性闪烁。
P020 T001 T000
[ TON T000 00005 ] [ TON T001 00006 ]
( P065 ) [ END ]
设置Off 时间(0.5s)
设置On 时间 (0.6s)
T000, T001是 100 ms 定时器
U CTU C010 R <S> 00010
( P060 )
P031 P030
C010 P060
设定值
设定值
P030从off变成 on, C010 的当前值加1。 P031是复位条件。
2
计数器指令
Company Logo
2、 CTD Down 计数器
❖ 当在计数脉冲输入检测到一个上升沿的时候,当前值减 1。
P020 T000 P023
[TMON T000 00100 ] ( P061 )
P023 P020
T000
[ RST T000 ]
P061
设定时间 ( t )
设定值
31
振动防止电路 (TMON指定举例)
1.系统图
定时器指令
Company Logo
从极限开关来的输入信号有振动噪声。通过 使用TMON 指令可以从有噪声的输入信号中 得到稳定的信号
( P061 )
设置传送带A off 延迟时间 (10s)
设置传送带B on延迟时间 (5s) 设置传送带B off 延迟时间 (5s)
[ TON T001 00100 ] ( P062 ) [ END ]
设置传送带C on 延迟时间 (5s)
31
传送带控制 (TOFF指令举例 )
3.时序图
定时器指令
1.系统图
传送带 C
On/Off
B A
M2
M1
M0
电机 2
电机 1
电机 0
输出模块
P02
0
程
1
序
2
3
.
.
.
.
.
F
输入模块
P06 0 1
MC0 MC1
2
MC2
3
.
.
.
.
.
F
31
定时器指令
Company Logo
传送带控制 (TOFF指令举例 )
通过使用TOFF定时器按顺序操作3台传送带(A, B, C)
1
2 .
.
电机
.
替换完成
.
.
I/O描述.Fra bibliotekP020 钻头下降检测
F
P021 替换完成
P060 打开报警灯
T000 钻头寿命定时器
程序
输出模块 P06
0
L
1
2
报警
.
灯
.
.
.
.
.
F
31
钻头替换报警 ( TMR 指令举例)
2.程序
定时器指令
Company Logo
加工中心的钻头的总的使用时间由PLC计数。如果总使用时 间超过钻头的使用寿命(100 小时), PLC输出一个钻头需 要替换的报警信号
编程举例
Company Logo
P020 T096 P023
[ TRTG T096 50 ]
t=5s
( P065 )
P020
[ RST T096 ]
t P065
31
定时器指令
Company Logo
传送带故障检测电路 (TRTG指令举例)
1.系统图
通过检查是否产品在特定的周期内传送从 而达到检测传送带故障的目的
从极限开关来的输入信号有振动噪声。通过 使用TMON 指令可以从有噪声的输入信号中 得到稳定的信号
2.程序
P020 T000
[ TMON T000 0002 ] ( M0020 )
即使在 P020 变成on 后的 瞬间抖动,M0020将保持 on 的状态 0.2 秒。
31
定时器指令
Company Logo
❖ 当复位信号启动,计数器触点和当前值清0 。
指令 CTU
MP Cxxx
V
KL
适用的设备 F TCS
O
D
#D
整 数
步
3
O
O
错误 (F110)
旗标
0 (F111)
进位 (F112)
2
计数脉冲 复位信号
计数器指令
Company Logo
计数器触点数目
U CTU C xxx
R <S>
V
编程举例
P030
P031 C010
定时器触点数目
设定时间( t ) = 单位周期(0.1 或0.01 s) x 设定值
编程举例
P020 T097 P021
[ TON T097 00200 ]
P020
( P065 ) [ RST T097 ]
T097
t = 20s ( 增加 )
Company Logo
31
定时器指令
Company Logo
检测信号
定时器触点
运算 指示器
P020 T5 M100
T=20s
2
计数器指令
Company Logo
1、 CTU Up 计数器
❖ 当在计数脉冲输入检测到一个上升沿的时候,当前值加 1。
❖ 初始当前值为0,当前值达到设定值时,计数器触点变 成on。
❖ 在计数器触点变成on,当前值持续增加直到最大值 (65535)。
指令 TMON
MP Txxx
V
KL
适用的设备 F TCS
O
D
#D
整 数
步
3
O
O
错误 (F110)
旗标
0 (F111)
进位 (F112)
31
定时器指令
输入条件
定时器设定值
TMON
Txxx
V
定时器触点数目
设定时间( t ) = 单位周期(0.1 或0.01 s) x 设定值
编程举例
Company Logo
❖ 执行RST指令, 定时器触点变成 off 同时当前值被清0。
指令 TRTG
MP Txxx
V
KL
适用的设备 F TCS
O
D
#D
整 数
步
3
O
O
错误 (F110)
旗标
0 (F111)
进位 (F112)
31
定时器指令
输入条件
定时器设定值
TRTG
Txxx
V
定时器触点数目
设定时间( t ) = 单位周期(0.1 或0.01 s) x 设定值
Company Logo
通过使用TOFF定时器按顺序操作3台传送带(A, B, C)
(开始 : A – B – C, 停止 : C – B – A)
On/Off (P020)
A (P060)
B(P061) C(P062)
T000 T001
T010 T011
31
定时器指令
Company Logo
3、 TMR 累计定时器 ❖ 当输入条件满足时当前值加1。 ❖ 当前值达到设定值时,定时器触点闭合。
31
定时器指令
输入条件
定时器设定值
TMR
Txxx
V
定时器触点数目
设定时间( t ) = 单位周期(0.1 或0.01 s) x 设定值
编程举例
Company Logo
P020 T096 P023
[ TMR T096 300 ] ( P061 )
[ RST T096 ]
P023 P020 T096
P061
❖ 当从up计数脉冲输入检测到一个上升沿的时候,当前值 加1。当从down计数脉冲输入检测到一个上升沿的时 候,当前值减1。
❖ 初始当前值为0。
t 1= 20 t 2= 10 t = t1+t2
设定值
31
定时器指令
Company Logo
钻头替换报警 ( TMR 指令举例)
1.系统图
加工中心的钻头的总的使用时间由PLC计数。如果总 使用时间超过钻头的使用寿命(100 小时), PLC输出 一个钻头需要替换的报警信号
钻头
输入模块 P02
0
传感器
❖ 初始当前值为设定值,当前值达到0时,计数器触点变 成on。
❖ 当复位信号启动,计数器触点关断和当前值被设置为设 定值。
指令 CTD
MP Cxxx
V
KL
适用的设备 F TCS
O
D
#D
整 数
步
3
O
O
错误 (F110)
旗标
0 (F111)
进位 (F112)
2
编程举例
计数器指令
计数脉冲 复位信号
U CTD R <S>
❖ 当当前值达到设定值时,定时器触点将接通。
❖ 当输入条件关断或者执行RST 指令时,定时器触点和当 前值将被清除。