sipos执行器培训
SIPOS

17
SIPOS Aktorik
Product range
热控一班技术交流PPT
技术 Converter (VSD)
Electronics
Details
Commissioning
Control
Highlights
SIPOS 5 – 变频智能型电动执行机构
第三部分:执行器故障现象及处理方法
SIPOS 执行器电位器校准方法
13
SIPOS Aktorik
Product range
热控一班技术交流PPT
技术 Converter (VSD)
Electronics
Details
Commissioning
Control
Highlights
SIPOS 5 – 变频智能型电动执行机构
第二部分:执行器调试方法(专业型)
如重新确定了信号齿轮比率,应该重做3、4、5项,直至出现
SIPOS 5 – 变频智能型电动执行机构
第一部分:SIPOS电动执行器机构概述
分体安装
7
SIPOS Aktorik
Product range
热控一班技术交流PPT
技术 Converter (VSD)
Electronics
Details
Commissioning
Control
Highlights
SIPOS 5 – 变频智能型电动执行机构
Electronics
Details
Commissioning
Control
Highlights
SIPOS 5 – 变频智能型电动执行机构
第一部分:SIPOS电动执行器机构概述
带变频器功能的 电源板
SIPOS执行器说明
第三章 SIPOS执行器说明概述西门子公司于1905年生产出世界上第一台电动执行机构,SIPOS(SIEMENS Positioner)的缩写为其电动执行机构的商标。
SIPOS已被广泛应用于全球各个工业生产领域。
中国电厂的所有电动汽机旁路上使用的执行机构几乎全部为原装进口SIPOS。
西门子公司还分别于1987年和1992年向中国的两家制造厂出售其SIPOS1系列和SIPOS 3系列的生产技术。
西门子公司相继淘汰了SIPOS 1和SIPOS 3,并首次创造性地将先进而又成熟的电机变频调速技术应用于电动执行机构中。
采用内置一体化变频器来控制执行器的电机,并于1997年推出面向21世纪的新一代SIPOS 5系列变频智能型电动执行机构。
为适应市场需要,自1999年10月1日起,西门子公司电动执行机构部门从西门子公司庞大的机构中独立出来。
并将SIPOS作为公司名,在德国成为具有独立法人地位的电动执行机构专业性公司:SIPOS Aktorik GmbH(西博思电动执行机构有限公司)。
西博思公司的总部及生产厂位于德国纽伦堡市,并已在全球主要国家和地区设有销售和服务机构。
自1999年10月1日起,西门子公司所有与电动执行机构有关的业务已全部转至西博思公司。
西门子公司不再生产电动执行机构。
独立后的西博思公司仍以SIPOS作为其品牌的商标,但不再属于西门子公司。
西门子公司现在是西博思公司在全球的重要客户之一。
西博思公司淘汰了SIPOS 5,于2001年年初推出第二代变频智能型电动执行机构-SIPOS 5 Flash系列。
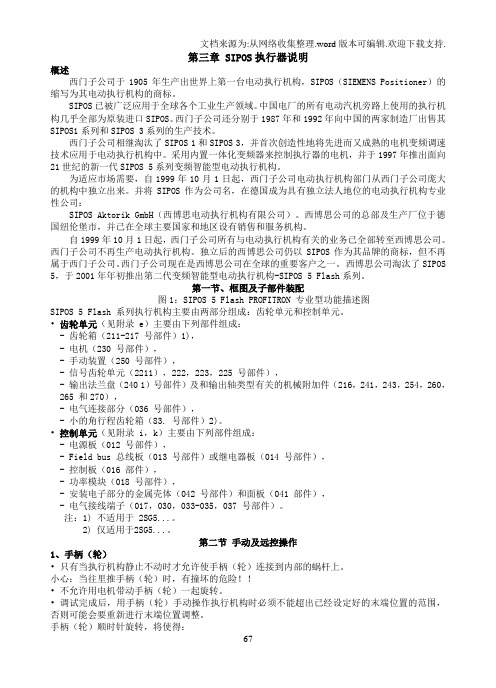
第一节、框图及子部件装配图1:SIPOS 5 Flash PROFITRON 专业型功能描述图SIPOS 5 Flash 系列执行机构主要由两部分组成:齿轮单元和控制单元。
•齿轮单元(见附录 e)主要由下列部件组成:- 齿轮箱(211-217 号部件)1),- 电机(230 号部件),- 手动装置(250 号部件),- 信号齿轮单元(2211),222,223,225 号部件),- 输出法兰盘(240 1)号部件)及和输出轴类型有关的机械附加件(216,241,243,254,260,265 和270),- 电气连接部分(036 号部件),- 小的角行程齿轮箱(83. 号部件)2)。
SIPOS西博思执行机构调试步骤

SIPOS西博思执行机构调试步骤第一步:检查电源和电气接线确保电源线连接正确,电压稳定,接地良好。
检查电动执行机构的电气接线是否正确,包括控制信号线和反馈信号线的连接是否准确。
第二步:检查机构的机械连接确保电动执行机构与阀门的机械连接正确,包括输出轴与阀门的连接、传动装置的连接等。
检查连接件是否紧固,并确保无松动。
第三步:检查传感器和反馈装置第四步:设置参数使用调试工具或上位机软件,设置SIPOS执行机构的工作参数。
这些参数包括远程/本地模式选择、开关限位设置、速度和力矩的调节等。
根据实际需要进行适当的调整,并保存参数设置。
第五步:开展空载测试在没有负载的情况下,对SIPOS执行机构进行空载测试。
首先将阀门关闭,然后通过控制信号或手动按钮等方式,使执行机构运动到全开/全关的位置。
观察执行机构的运动是否平稳、准确,是否存在异常噪声或振动等情况。
第六步:进行负载测试在有负载的情况下,对SIPOS执行机构进行负载测试。
根据实际情况,可以使用工具或装置模拟阀门负载。
通过控制信号或手动按钮等方式,使执行机构运动到不同的位置,观察其在负载下的运动是否正常。
同时,还需要测试执行机构的力矩输出是否符合要求。
第七步:进行功能测试对SIPOS执行机构的各项功能进行测试,包括远程/本地切换、手动操作、故障诊断等。
确保其功能正常,并在需要的情况下进行调整和优化。
第八步:记录和分析测试数据对每一次调试测试进行记录和分析。
记录包括执行机构的电流、电压、力矩等参数,在不同位置或负载下的测试结果等。
通过分析测试数据,可以评估执行机构的性能,并对其进行进一步的调整和优化。
第九步:调试完结在完成所有的调试测试后,对SIPOS执行机构进行综合评估。
如果发现问题或不足,需要返工或重新调整。
在确保一切正常的情况下,将执行机构的参数设置保存,并将其交付给最终用户或进行下一步的操作。
以上就是SIPOS西博思执行机构的调试步骤。
根据实际情况,调试过程可能会有所不同,但总体原则是确保执行机构的各项功能正常,能够稳定准确地控制阀门的位置和状态。
SIPOS经济型和专业型电动执行机构调试总结

SIPOS经济型和专业型电动执行机构调试总结SIPOS经济型电动执行机构调试总结一、概述1( SIPOS 5 FLASH 系列执行机构主要由两部分组成:齿轮单元和电子单元。
经济型执行机构调试时需取下电子单元的罩子及信号齿轮单元的罩子。
2( 取下电子单元罩子后可见内部结构如图1所示:图1电子单元结构 3(信号齿轮单元结构如图2所示:图2 带机械式位置指示器的信号齿轮单元 4(图1中输出速度及关断力矩电位器的设定如下所示:5(8个DIP开关的作用如下所示:6(DIP开关中S4和S5用来选择一种输出组合,选择结果如下:当改变输出速度、关断力矩、关方向、关断模式、输出信号及控制模式时,必须要把DIP开关S8打到ON,然后再打到OFF,系统才能认可新的设定。
二、调整执行机构的行程极限(即末端位置调整)1( 末端位置调整,必须注意如下几点:1) 用电位器和DIP开关进行的和阀门有关的设定必须已经完成;2) 只能在就地进行该项操作;3) 在开始调整执行机构的行程极限时,阀门必须不能处在绷紧的状态,必要时可用手柄或手轮松开阀门;4) 当调整末端位置关断模式为力矩关断模式的行程极限时,必须用电动方式驱动执行机构的运转;5) 如进行执行机构的行程极限调整,DIP开关S8必须在ON的位置。
2( 末端位置调整2(1信号齿轮单元中心轮的调整方法为:用手抓住信号齿轮单元的D(图2)部分不动,转动E(图2)部分。
2(2运行时中心轮的旋转方向如图3:图3 中心轮的旋转方向2(3调整开末端位置:1) S8?ON;2) 如果为行程关断模式(S3=ON),可用就地操作面板的OPEN健(如图1所示)、远控模式下的开关量输入信号OPEN开命令或手柄(手轮)朝开末端位置运行执行机构,此过程操作面板上的绿灯闪烁红灯常亮。
[如果为力矩关断模式(S3=OFF),可用就地操作面板的OPEN健(如图1所示) 或远控模式下的开关量输入信号OPEN开命令朝开末端位置运行执行机构,直到达到所设定的关断力矩,执行机构自动停止运行。
SIPOS电动执行机构调节步骤
SIPOS电动执行机构调节步骤步骤一:确认调节目的和要求在进行调节之前,首先要明确调节的目的和要求。
根据所需的控制参数,例如阀门的开度或流量,来确定调节的范围和目标。
同时还需要确认所使用的控制信号类型和范围,以及所使用的控制系统的设定参数。
步骤二:检查执行机构的状态在开始调节之前,需要对执行机构进行全面的检查,确保其正常运行。
检查执行机构的电源接线是否正确,以及电气元件的连接是否稳固。
同时还需要检查执行机构的机械部分,如传动装置和阀门连接情况等,确保其没有松动或堵塞等问题。
步骤三:调节控制信号调节控制信号是调节执行机构的关键步骤之一、根据所使用的控制系统,可以通过调节控制器的输出信号或手动设置控制信号来实现。
在调节之前,需要确保控制信号的类型和范围与执行机构的要求相匹配。
可以通过调节控制器的参数设置来调整信号的大小和响应速度,以达到所需的控制效果。
步骤四:调节执行速度和力矩执行机构的速度和力矩是调节过程中需要关注的另外两个重要参数。
可以通过调节执行机构的电机控制器的参数来实现。
对于速度的调节,可以通过调整电机的转速和加速度来实现。
对于力矩的调节,可以通过调整电机的输出功率和力矩转矩比来实现。
在调节过程中,需要根据实际情况进行实验和调整,以获得最佳的调节效果。
步骤五:测试和验证调节效果完成调节过程后,需要进行测试和验证调节效果。
可以通过观察执行机构的运行情况和输出参数的变化来评估调节的效果。
对于阀门执行机构,可以通过测量阀门的开度和流量来验证调节的准确性。
如果调节效果不理想,可以进行二次调整或修正,直到达到要求的控制效果为止。
步骤六:记录和报告调节过程在进行调节过程中,需要记录关键的参数和操作,包括控制信号的设置、执行机构的响应和调节效果等。
这些记录可以用于后续的维护和分析,以及提供调节结果的报告。
以上就是SIPOS电动执行机构的调节步骤。
在实际调节过程中,需要根据具体的情况和要求进行调整和改进,以确保最佳的调节效果。
第九次培训执行器培训报告

执行器知识培训总结一、概述执行器根据调节器的输出,改变被控介质物料或能量的大小,实现对被控对象的控制目的,是构成控制系统的重要组成部分。
执行器由执行机构和调节机构组成。
执行机构是执行器的推动装置,它接收调节器的输出信号,产生相应的推力或位移,对调节机构产生推动作用。
按照执行机构所使用的能源,可以将执行器分为电动执行器、气动执行器和液动执行器,各自的主要特性如表所示,在实际生产中主要应用电动执行器和气动执行器。
执行器的主要特性表调节机构是执行器的调节装置,受执行机构的操纵,直接控制能量或物料的输送量。
常见的调节机构是调节阀,通过改变阀门的开度来调节阀芯与阀座间的流通面积,以控制被控介质的流量。
调节阀要直接与被控介质接触,因此,阀芯与阀体有不同的结构形式,所用的材料也各不相同,以适应不同的应用场合。
阀门定位器功能示意图阀门定位器是气动执行器的主要附件,与执行机构构成一个负反馈系统(如上图所示),以确保调节阀的正确定位,并能减少调节信号的传输滞后,从而提髙控制系统的调节精度。
由于电动执行器中包含有位置发送器,能将位置信号反馈到输人端,构成负反反馈系统,来确保调节阀的正确定位,故不需要附加的定位器。
二、电动执行机构通常在防爆要求不髙且无合适的气源的情况下,使用电动执行机构作为调节机构的推动装置。
1.工作原理电动执行机构有角行程与直行程两种,两者的电气原理完全相同,都是将调节器输出的0〜10mA或4〜20 mA直流电流信号,转换成对应的位移信号(角位移或直线位移),去操纵调节机构。
角行程执行机构的基本结构如图所示。
伺服放大器对4〜20 mA的输入信号I i与位置反馈信号I t加以比较,并将差值进行功率放大,其输出用于驱动两相伺服电动机正转或反转。
减速器把伺服电机高转速、小力矩的输出功率转换成低转速、大力矩的输出功率,带动执行机构输出轴改变转角(电机正转,转角增大,电机反转,转角减小)。
位置发送器将输出轴的转角(0〜90°)线性转换成4〜20mA的反馈电流I f,送到伺服放大器与输人电流I t相比较,从而构成负反馈系统。
SIPOS执行机构

1 、结构组成: 专业型SIPOS 5 执行机构主要由两部分组成:齿轮单元和控制单元:
• 齿轮单元主要由下列部件组成:齿轮箱、电机、手动装置、信号齿轮单元、 输出法兰盘及和输出轴类型有关的机械附加件和电气连接部分。 • 控制单元主要由下列部件组成:电源板、Field bus 总线板或继电器板、控制 板、功率模块、安装电子部分的金属壳体和面板和电气接线端子。
2 、操作方式: 专业型SIPOS 5 执行机构主要有三种操作方式:就地手轮操作、就地面 板操作、远端操作:
• 就地手轮操作方式:将手柄压下然后摇动手柄可以手动操作执行器,注意: 必须在确保执行机构不动时,才允许将手柄连接到内部的螺杆上
•远方操作方式:将执行器的远方就地操作按钮打至远方位,然后可以通过 远方指令对执行器进行操作。 •就地面板操作:通过就地操作面板,可以选择操作执行机构。操作面板上 有四个按键用于操作。当控制板上的LOCAL LED(就地操作指示灯)亮 起时,就表示选择了就地控制模式。按键的功能: LOCAL/REMOTE:用来在就地操作和远控两种模式之间进行转换。 LOCAL 和REMOTE 指示灯用于表明目前选择的操作地点。在就地操作模 式中,只 有就地发出的控制命令才能够被执行。而在远控模式中,只有来 自远程的控 制命令才起作用。 OPEN:当按下此键后,执行机构朝开方向运行。 CLOSE:当按下此键后,执行机构朝关方向运行。 STOP:按下此键后,执行机构停止运行。 使执行机构运行到紧急位置(只在LOCAL 模式下),如果同时按下 OPEN 和CLOSE 键,执行机构就朝事先设定好的紧急位置运行,直到按下 STOP 键或者将操作模式切换到REMOTE 模式下。 在就地操作时,对短时按下的按键的响应和参数设置permanent contact (持续型接点信号)的响应是一样的,也就是说,只要松开“开”或“关”的键, 执行机构就停止运行。如果按下按键并保持了2 秒种以上,则就地操作的响 应就和参数设置为pulse contact(脉冲型接点信号)的响应一样,即执行机 构直到按下停止键、或接收到相反方向的控制命令时才停止运行。
SIPOS电动执行器调试步骤及常见故障处理

清除执行器上的灰尘和杂物,确保其工作 正常。
检查限位开关
检查限位开关是否正常,确保其处于正确 位置。
检查电机
检查电机是否正常,无损坏或异常现象。
调试步骤
01 通电测试
给执行器通电,观察其工 作是否正常,无异常声音 或振动。
03 手动操作测试
手动操作执行器,检查其
操作是否灵活,无卡滞现
象。
SIPOS电动执行器调 试步骤及常见故障处
理
目录
• SIPOS电动执行器调试步骤 • SIPOS电动执行器常见故障及处理
方法 • SIPOS电动执行器维护保养 • SIPOS电动执行器使用注意事项
01
SIPOS电动执行器调试步骤
调试前的准备工作
检查பைடு நூலகம்源连接
确保执行器电源连接正确,无短路或断路 现象。
总结词
执行器温度过高,可能引起损坏。
详细描述
首先检查电源电压是否过高,如果电源电压过高,会导致执行器过热。此外, 需要检查执行器的散热是否良好,以及执行器的负载是否过大。如果以上都没 有问题,可能是执行器内部故障,需要更换新的执行器。
故障四:执行器噪音过大
总结词
执行器运行时产生异常噪音。
详细描述
首先检查电源电压是否过高或过低,如果电源电压过高或过低,会导致执行器噪音过大。此外,需要 检查执行器的轴承是否损坏或润滑不良,以及执行器的负载是否过重或不平衡。如果以上都没有问题 ,可能是执行器内部故障,需要更换新的执行器。
故障二:执行器动作缓慢
总结词
执行器动作缓慢,反应迟钝。
详细描述
首先检查电源电压是否正常,如果电源电压过低,会导致执行器动作缓慢。此外,需要检查控制信号的频率和幅 值是否在正常范围内,以及执行器是否被堵塞或被过度磨损。如果以上都没有问题,可能是执行器内部故障,需 要更换新的执行器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
备注:Commissioning调试菜单中的参数只能在 Locpar模式下,并且输入4位密码才能修改;按键 ↑↓在菜单和参数间切换;使用Enter键进入菜单; 切换Remote/Local键退出,使用Enter键确认的参数 就被保存下来。
备注:操作方法按面板按键说明操作。 四位密码 9044
nguage setting 语言设定
high curr. Fault
high voltage
电源电压超过了允许的+ 15%的范围。
故障信息3
InitParams fault Inverter fault
工厂内部设定的参数错误。 控制板和变频器之间的通 讯故障。
更换控制板。 断电然后再上电。如果该故障仍然存在,更 换整个控制单元。
Local disabled
SIPOS执行器培训教材
华润水泥(贵港) 制造部电气工段 洪威 2017年1月17
面板按键说明
关(↑)、 开(↓)
回车、 停止 本地LOCal、 远程Remote
面板按键说明
参数设置与调试
菜 单
1. language setting 语言设定 2. Commissioning 调试 3. Observing 观察 4. Diagnosis 诊断 5. ← return to menu 返回菜单
更换整个4.1 actual data (实际数据) 4.2 maint. Limit (维护极限) 4.3 maintenance (维护)
诊断
4.3.1 not necessary 未达到任何一个维护极限值,不需要维护
4.3.2 necessary 达到一个维护极限值,需要维护
故障信息2
DPR error
EEPROM error ext.volt. Fault fault anal inp.2 handwhl.pressed
DualPortRAM 故障
EEPROM 故障 主回路供电电源故障。 I > 21 mA 或 I < 3.6 mA (活的零点) 正在用手轮(柄)操作执行 机构。 变频器过电流。
调试
cut-off mode cl. 关模式 行程关travel / 力矩关torque cut-off mode op. 开模式 行程开travel / 力矩开torque(一般情况选择行程开或关) …………………. …………………..
• 2.2调整行程极限(开限位和关限位)(local模式)
compl.new pos 重新设定所有末端位置 new setting of OPEN开末端 CLOSE关末端 move to op.pos 开位置,按enter until TL (reached/button) move to cl.pos 关位置,按enter until TL (reached/button) 备注:Commissioning调试菜单中的参数只能在Locpar模式下,并且输入4位密码才能修改;按 键↑↓在菜单和参数间切换;使用Enter键进入菜单;切换Remote/Local键退出,使用Enter键 确认的参数就被保存下来。
low voltage MotTemp too high moved too far
就地操作被禁止。
电压低于允许的-15%的 范围。 电机过热故障。 执行机构运行到了位置传 感器所容许的范围之 外。 内部到电位器的电缆断线。
取消 PROFIBUS 主站上所作的禁止。
检查主回路的电源电压。检查电源电压是否 有波动及波形畸变。 检查阀门是否太涩,操作的循环次数太高, 环境温度太高。 重新调试 见 6.5.2.2 节。 如果需要,可以 重新进行末端位置调整 参见 6.5.2 节。 检查控制单元和齿轮单元连接处的接线头。 (等故障排除后 重新进行末端位置 调整。分体安装时检查接线头。
故障信息1
显示 act. val. Error blocked in move
解释 0/4...20mA 实际位置值故障。 在末端位置范围外发生了过 力矩故障。 PROFIBUS 通讯故障。 末端位置的设定无效(不正 确)。
可能的解决方法 更换控制板。 检查,必要时可以提高设定的力矩限幅值。 检查阀门是否太涩。(执行机构可以 朝相反的方向运行)。 检查主站的联系报文。 检查 PROFIBUS 进线电缆的接线头。 重新进行末端位置调整。
setp. inp. Error
模拟量输入通道 1 的 4...20mA 输入故障。 I > 21mA 或 I < 3.6mA (活的零点)。 主回路或电子板电压故障。
voltage error
更换整个控制单元。(有可能是控制板故障, 也有可能是电源 板故障)。
watchdog error
看门狗错误。
更换 PROFIBUS 安装组件。
更换控制板。 检查主供电回路。 检查接线头。 检查是否是无意中的操作,或手柄(轮) 是否回复到位。分体安装时检查接线 头。 检查到电机的电缆是否有短路的地方。检 查运行环境,例如,环境温度。如有 必要,更换电子元件。 检查主回路的电源电压。 检查电源电压是 否有波动及波形畸变。
谢谢
• • 备注:操作方法按面板按键说明操作。 四位密码 9044
3.Observing
观察
• 在远程和本地模式下均可进入观察菜单,按回车键进入主 菜单, 上下键找到观察菜单Observing • 再次回车,即看到(state of unit)可能存在的两种状态:
1. ready(准备好,没有故障当前状态) 2. fault signal (当前的故障状态,故障信息的解释详见2.2) 2.1 如果存在故障,可以按enter来复位,若能复位,则显示 is reset 。如故障 信号不能复位,则显示reset,表明系统故障,并通知服务人员。 2.2 故障信息表(见下表)
bus comm. Fault check end-pos.!
check parameters
com. via bus Converter temp
调试不正确。
通过 PROFIBUS 总线进行 的调试。 变频器过热故障。
检查设定的参数。
等待通过总线进行调试。 检查阀门是否太涩,操作的循环次数太高, 环境温度太高。
• 选择 UK/US英语,其他语言选项忽略。 • 当选择好语言后, 按回车键两次确定就返 回主菜单。
missioning
• 2.1设定和阀门有关的参数
close direction 关方向(clockwise顺时针、anti-clockwise 逆时针) mot.temp.warn. 电机过热报警(电机过热报警点设定135°) mot.temp.prot. 电机过热保护(on 启用 、 off 关闭)
OpCirc PosInd
故障信息4
OpCirc TempInd OpCirc. BinInp RAM error runtime error
电机温度检测回路的电缆断 线。 开关量输入回路开路。 RAM 故障。 运行时间故障。
分体安装时检查接线头。检查控制单元和齿 轮单元连接处的接线头。 检查进线电缆。 更换控制板。 检查最终控制元件是否运转灵活。提高设定 的力矩限幅值。 电位器故障或重新 固定的位置不当(不是随便固定的)。 增大或相应地减少电流值。 检查接线头。