永磁同步电动机(PMSM)三相坐标系的数学模型
三相永磁同步电机(PMSM)矢量控制建模与仿真
目录1 引言 (1)1.1 课题的背景与意义 (1)1.1.1 课题背景 (1)1.1.2 课题意义 (1)1.2 永磁电机发展概况 (1)2 机电能量转换和拉格朗日方程 (2)2.1 机电能量转换 (2)2.2 三相同步电机电磁转矩 (7)2.3 拉格朗日方程 (9)3 三相永磁同步电机的数学模型 (11)3.1 三相PMSM的基本数学模型 (11)3.2 三相PMSM的坐标变换 (13)3.2.1 Clark变换 (13)3.2.2 Park变换 (14)3.3 同步旋转坐标系下PMSM的数学模型 (14)4 三相永磁同步电机的矢量控制 (16)4.1 转速环PI调节器的参数整定 (16)4.2 电流环PI调节器的参数整定 (17)4.3 三相PMSM矢量控制系统的仿真 (19)4.3.1 仿真建模 (19)4.3.2 仿真结果分析 (22)总结 (23)参考文献 (23)三相永磁同步电机矢量控制建模与仿真摘要:永磁同步电机具有体积小、效率和功率因数高等优点,因此越来越多的应用在各种功率等级的场合。
永磁同步电机的控制是永磁同步电机应用的关键技术,永磁同步电机的结构特点使得采用矢量控制系统有很大的优势。
本文首先分析了永磁同步电机矢量控制的发展概况,然后从机电能量转换的角度出发,解释三相永磁同步电机的机电能量转换原理,推导拉格朗日运动方程。
此外,列写出永磁同步电机在三相静止坐标系和dq坐标系下的数学模型。
基于Simulink建立了转速电流双闭环矢量控制系统的仿真模型,通过对仿真结果分析,验证了永磁同步电机矢量控制系统性能的优越性。
关键词:永磁同步电机,矢量控制,Simulink1 引言1.1 课题的背景与意义1.1.1 课题背景交流电机的控制性能在磁场定向矢量控制技术提出后才有了质的飞跃。
磁场定向矢量控制技术采用的是励磁电流和转矩电流的解稱控制,兼顾磁场和转矩的控制,克服了交流电机自身耦合的缺点。
三相永磁同步电机坐标变换推导

一、概述如今,在工业界中,三相永磁同步电机因其结构简单、运行稳定、效率高等特点成为了一种常见的电机类型。
而电机的控制则是保证电机能够稳定高效运行的关键。
掌握三相永磁同步电机的控制原理对于工程师来说至关重要。
在三相永磁同步电机的控制中,坐标变换技术是一种常用的数学方法,通过坐标变换可以将三相电机的控制问题转换为直流电机控制问题,从而简化了控制器的设计。
二、三相永磁同步电机的数学模型1. 三相永磁同步电机是一种特殊的同步电机,它的定子绕组被连接到一个三相交流电源上。
它的转子上装有永磁体,因此在没有机械负载情况下依然能够产生恒定的磁场,这使得电机具有较高的效率和响应速度。
2. 为了完成对三相永磁同步电机的控制,我们需要建立其数学模型。
假设电机有a、b、c三个定子绕组,每个绕组的电流分别为ia、ib、ic,电机的磁链为Ψ,电机的控制变量为u,那么电机的数学模型可以表示为:其中,Ld和Lq分别表示d轴和q轴上的电感,ψp是永磁体的磁通,M是电机的磁链,J是电机的转动惯量,B是电机的阻尼系数,Te为电机的电磁转矩。
三、坐标变换推导1. 在三相永磁同步电机的控制中,我们通常使用dq坐标系来描述电机的运动状态。
在dq坐标系中,d轴与永磁体的磁通方向一致,q轴与d轴垂直。
通过dq坐标变换可以将三相电机的控制问题转换为直流电机的控制问题。
2. 我们可以通过以下的数学推导来实现坐标变换:在直角坐标系下,电机的三相电流可以表示为:假设θ为电机的旋转角度,那么dq坐标系转换可以表示为:在dq轴上,电机的电流可以表示为:通过以上推导,我们可以得到电机在dq坐标系下的控制方程,从而可以实现对电机的控制。
四、结论通过以上的推导,我们可以看到坐标变换技三相永磁同步电机坐标变换推导是电机控制中的关键步骤。
坐标变换可以让我们更方便地对电机进行控制,简化了控制器的设计流程,并且使得控制更加高效和稳定。
在坐标变换的基础上,我们可以进一步推导出电机的控制方程,从而实现对电机的精确控制。
永磁同步电动机三相坐标系的数学模型

4.2 永磁同步电动机三相坐标系的数学模型为方便分析起见,将三相永磁的同步电动机看作是理想的电机,也就是说它符合下列假设:(1) 转子上面没有阻尼绕组;定子中各个绕组的电枢电阻、电感值相等,三相定子的绕组按对称的星形分布;(2) 其气隙磁场服从正弦分布而且各次谐波忽略不计,感应电动势也服从正弦分布;(3) 永磁体的等效的励磁电流恒定不改变;电机中的涡流、趋肤效应、电机铁芯饱和和磁滞损耗的影响均忽略不计;温度与频率不影响电机的参数。
坐标系正方向的选取: (1) 转子逆时针方向旋转为正; (2) 正向电流生出正向磁链;(3) 电压,电流的正方向按照电动机的惯例。
则静止三相坐标系里永磁同步电动机的定子侧电压方程3333s s s s u R i p ψ=⋅+ (4-1)静止三相坐标系里永磁同步电动机的定子侧磁链方程3333()s s s f s L i F ψψθ=⋅+⋅ (4-2) 式中,3A s B C i i i i ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3000000s R R R R ⎛⎫ ⎪=⎪ ⎪⎝⎭,3A s B C ψψψψ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 3A s B C u u u u ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3sin ()sin(120)sin(120)s F θθθθ⎡⎤⎢⎥=-︒⎢⎥⎢⎥+︒⎣⎦3331cos120cos 240100cos1201cos120010cos 240cos1201001s m l L L L ︒︒⎛⎫⎛⎫ ⎪ ⎪=︒︒+ ⎪ ⎪ ⎪ ⎪︒︒⎝⎭⎝⎭电机统一理论和机电能量转换告诉我们,电机的电磁力矩[37]*I m ()s s e p T n i ψ=- (4-3) 式中,*代表取共轭复数,Im 代表取虚部。
4.3 永磁同步电动机dq 坐标系的数学模型三相交流电机是一个耦合强、非线性、阶次高的多变量系统,它在三相静止的坐标系里的数学模型相当复杂,应用传统的控制策略对其实现交流调速有很大的困难,所以对于一般的三相交流电机常常应用矢量控制的方法,采用坐标变换,把三相交流的绕组等效变换成两相互相垂直的交流绕组或者旋转的两相直流的绕组,等效变换以后其产生的磁动势相等,系统的变量之间得到了部分的解耦,它的数学模型得到了大大简化,使得对于系统的分析和控制也简化了很多,使得它的数学模型与比较简单的直流电机类似[52]。
永磁同步电机计算实例
永磁同步电机计算实例
永磁同步电机(PMSM)的控制涉及到多个步骤,包括电流检测、坐标变换、电流控制和电压矢量计算。
下面是一个简单的PMSM计算实例,涵盖了这
些主要步骤:
1. 电流检测:使用霍尔效应电流传感器来测量三相定子电流。
假设测得的三相电流分别为ia、ib和ic。
2. 坐标变换:将三相电流从静止坐标系转换为两相坐标系。
在这个例子中,采用Park变换将三相电流ia、ib、ic转换为两相坐标系上的电流iα和iβ。
这个变换的公式如下:
iα = ia + (√3 / 2) ib - (1 / 2) ic
iβ = (1 / 2) ib + (√3 / 2) ic - ia
3. 电流控制:根据控制环的设定,计算出d轴和q轴的电流参考值Idref和Iqref。
然后,将实际测得的iα和iβ与参考值进行比较,得到误差信号。
4. 电压矢量计算:使用比例积分(PI)控制器来调节误差信号,并生成相应的电压矢量。
在PMSM中,通常使用电压矢量脉宽调制(SVPWM)来生
成控制电压。
根据误差信号和当前角度,可以估算出新的电压矢量,并确定SVPWM的占空比。
5. 角度估算:使用传感器(如光电编码器或旋转变压器)来测量电机的位置和速度。
根据这些测量值,可以估算出电机的角度。
这个角度用于坐标变换和电压矢量计算。
请注意,上述步骤是一个简化的示例,实际的PMSM控制算法可能更加复杂。
此外,还需要考虑其他因素,如电机参数、控制环路设计、电机热管理、电磁噪声等。
永磁同步电机的控制原理介绍
一、电机分类二、永磁同步电机的分类三、PMSM的运行原理四、坐标变换五、PMSM的数学模型六、伺服系统软件设计七、SVPWM原理及实现方法一、电机分类:1、按作用分:电动机和发电机。
电动机将电能转化为机械能;发电机将其他形式的能量转化为电能。
2、按工作电源分类根据电动机工作电源的不同,可分为直流电动机和交流电动机。
其中交流电动机还分为单相电动机和三相电动机。
3、按结构及工作原理分类电动机按结构及工作原理可分为直流电动机,异步电动机和同步电动机。
同步电动机还可分为永磁同步电动机、磁阻同步电动机和磁滞同步电动机。
异步电动机可分为感应电动机和交流换向器电动机。
感应电动机又分为三相异步电动机、单相异步电动机和罩极异步电动机等。
交流换向器电动机又分为单相串励电动机、交直流两用电动机和推斥电动机。
直流电动机按结构及工作原理可分为无刷直流电动机和有刷直流电动机。
有刷直流电动机可分为永磁直流电动机和电磁直流电动机。
电磁直流电动机又分为串励直流电动机、并励直流电动机、他励直流电动机和复励直流电动机。
永磁直流电动机又分为稀土永磁直流电动机、铁氧体永磁直流电动机和铝镍钴永磁直流电动机。
4、按用途分类电动机按用途可分为驱动用电动机和控制用电动机。
驱动用电动机又分为电动工具(包括钻孔、抛光、磨光、开槽、切割、扩孔等工具)用电动机、家电(包括洗衣机、电风扇、电冰箱、空调器、录音机、录像机、影碟机、吸尘器、照相机、电吹风、电动剃须刀等)用电动机及其它通用小型机械设备(包括各种小型机床、小型机械、医疗器械、电子仪器等)用电动机。
二、永磁同步电机的分类:永磁同步电机由于具有以下优点而得到了广泛的应用:1)功率密度大(同等功率,特性体积小)2)功率因数高(气隙磁场主要或全部由转子磁场提供)3)效率高(不需要励磁绕组,绕组损耗小)4)结构紧凑、体积小、重量轻、维护简单。
永磁同步电机分为正弦波电流驱动的永磁同步电机(PMSM)和方波电流驱动永磁同步电机(BLDCM)。
交流永磁同步电动机数学模型的建立与分析
交流永磁同步电动机数学模型的建立与分析1模型建立交流永磁同步电动机(Permanent Magnet Synchronous Motor, PMSM)根据转子位置可以分为内转子、外转子两种。
主要部件有机座、定子铁心、定子线圈、转子铁芯、永磁体、轴、轴承和电机端盖等,此外还包括转子支撑部件、冷却涵道、接线盒等结构。
PMSM的定子主要指定子绕组与定子铁心部分,对于常见的三相绕组,三相绕组对称分布,各相绕组轴线在空间互差120°,且通入三相绕组的电流相位依次相差120°。
PMSM的转子包括永磁体、转子铁心、转轴、轴承等。
转子提供的磁场主要是由转子铁芯上极性交替的永磁体所发出的,具体气隙平均磁密值大小以及气隙磁密波形的正弦性,主要取决于转子铁芯中永磁体的尺寸、摆放形式以及隔磁措施等因素。
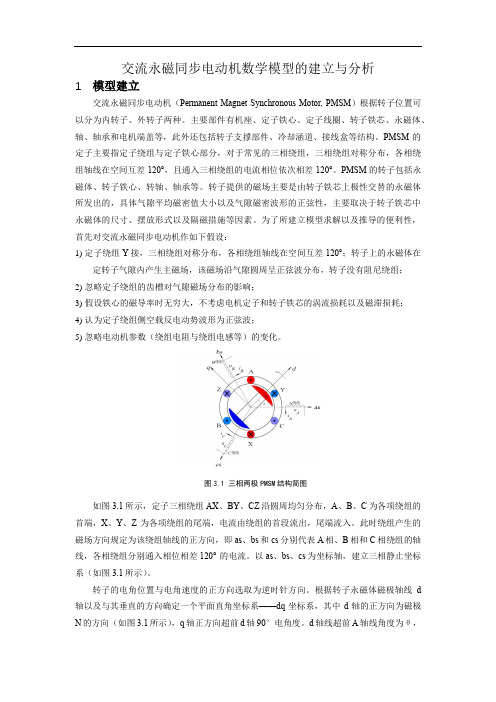
为了所建立模型求解以及推导的便利性,首先对交流永磁同步电动机作如下假设:1)定子绕组Y接,三相绕组对称分布,各相绕组轴线在空间互差120°;转子上的永磁体在定转子气隙内产生主磁场,该磁场沿气隙圆周呈正弦波分布,转子没有阻尼绕组;2)忽略定子绕组的齿槽对气隙磁场分布的影响;3)假设铁心的磁导率时无穷大,不考虑电机定子和转子铁芯的涡流损耗以及磁滞损耗;4)认为定子绕组侧空载反电动势波形为正弦波;5)忽略电动机参数(绕组电阻与绕组电感等)的变化。
图3.1 三相两极PMSM结构简图如图3.1 所示,定子三相绕组AX、BY、CZ沿圆周均匀分布,A、B、C为各项绕组的首端,X、Y、Z为各项绕组的尾端,电流由绕组的首段流出,尾端流入。
此时绕组产生的磁场方向规定为该绕组轴线的正方向,即as、bs 和cs 分别代表A 相、B 相和C 相绕组的轴线,各相绕组分别通入相位相差120° 的电流。
以as、bs、cs为坐标轴,建立三相静止坐标系(如图3.1所示)。
转子的电角位置与电角速度的正方向选取为逆时针方向。
PMSM三相坐标系的数学模型
4.2 永磁同步电动机三相坐标系的数学模型为方便分析起见,将三相永磁的同步电动机看作是理想的电机,也就是说它符合下列假设:(1) 转子上面没有阻尼绕组;定子中各个绕组的电枢电阻、电感值相等,三相定子的绕组按对称的星形分布;(2) 其气隙磁场服从正弦分布而且各次谐波忽略不计,感应电动势也服从正弦分布;(3) 永磁体的等效的励磁电流恒定不改变;电机中的涡流、趋肤效应、电机铁芯饱和和磁滞损耗的影响均忽略不计;温度与频率不影响电机的参数。
坐标系正方向的选取: (1) 转子逆时针方向旋转为正; (2) 正向电流生出正向磁链;(3) 电压,电流的正方向按照电动机的惯例。
则静止三相坐标系里永磁同步电动机的定子侧电压方程3333s s s s u R i p ψ=⋅+ (4-1)静止三相坐标系里永磁同步电动机的定子侧磁链方程3333()s s s f s L i F ψψθ=⋅+⋅ (4-2) 式中,3A s B C i i i i ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3000000s R R R R ⎛⎫ ⎪=⎪ ⎪⎝⎭,3A s B C ψψψψ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 3A s B C u u u u ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3sin ()sin(120)sin(120)sF θθθθ⎡⎤⎢⎥=-︒⎢⎥⎢⎥+︒⎣⎦ 3331cos120cos 240100cos1201cos120010cos 240cos1201001s m l L L L ︒︒⎛⎫⎛⎫⎪ ⎪=︒︒+ ⎪ ⎪ ⎪ ⎪︒︒⎝⎭⎝⎭电机统一理论和机电能量转换告诉我们,电机的电磁力矩[37]*Im()s s e p T n i ψ=- (4-3)式中,*代表取共轭复数,Im 代表取虚部。
4.3 永磁同步电动机dq 坐标系的数学模型三相交流电机是一个耦合强、非线性、阶次高的多变量系统,它在三相静止的坐标系里的数学模型相当复杂,应用传统的控制策略对其实现交流调速有很大的困难,所以对于一般的三相交流电机常常应用矢量控制的方法,采用坐标变换,把三相交流的绕组等效变换成两相互相垂直的交流绕组或者旋转的两相直流的绕组,等效变换以后其产生的磁动势相等,系统的变量之间得到了部分的解耦,它的数学模型得到了大大简化,使得对于系统的分析和控制也简化了很多,使得它的数学模型与比较简单的直流电机类似[52]。
永磁同步电机数学模型推导

PMSM 电机在旋转dq 坐标系中定子电压和定子磁链方程为d ds d q q q s q d d d d f q q q d u R i dtd u R i dt L i L iψωψψωψψψψ⎧=+-⎪⎪⎪=++⎨⎪=+⎪⎪=⎩(1)d u ,qu 为d 、q 轴的定子电压;d L ,qL 为d 、q 轴的电枢电感,对于隐极电机来说d L =q L =L;di ,q i为d 、q 轴的电枢电流;d ψ,q ψ为d 、q 轴的定子磁链;sR 为电枢绕组电阻;fψ为永磁铁产生的磁链,为常量;ω为电机电角速度,有r p ωω=,p 为电机的极对数,r ω为电机转子角速度;由式(1)推出:11d sd r q d q f s r d q r qdi R i p i u dt L L di p R p i i udtL L L ωψωω-⎧=++⎪⎪⎨--⎪=-+++⎪⎩ (2)PMSM 电机在旋转dq 坐标系中电磁转矩方程为()()1.5 1.5 1.5e d q q d d q d q f q f qT p i i p L L i i i p i ψψψψ=-⎡⎤=-+⎣⎦=(3)PMSM 电机的转子动力学方程为re m r d T T b Jdt ωω--=(4)e T 为电机的电磁转矩; mT 为电机的负载扭矩;b 为电机的阻尼系数; J 为电机的转动惯量;由式(3)式(4)可以推出1.5f m r q r p T d bi dt J J J ψωω--=++(5)状态方程为X AX Bu C =++选取,d d q q r i u X i u u ω⎛⎫⎛⎫ ⎪== ⎪⎪⎝⎭ ⎪⎝⎭,由式(2)式(5)推出10001,0,01.5000sr f s rm f R p L L p R A p B C L L L T p b J JJ ωψωψ⎛⎫⎛⎫-⎛⎫⎪ ⎪ ⎪ ⎪ ⎪⎪⎪ ⎪=---== ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪ ⎪-⎝⎭ ⎪ ⎪⎝⎭⎝⎭。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
永磁同步电动机(PMSM)三相坐标系的数学模型2 PMSM 三相坐标系的数学模型为方便分析起见,将三相永磁的同步电动机看作是理想的电机,也就是说它符合下列假设:(1) 转子上面没有阻尼绕组;定子中各个绕组的电枢电阻、电感值相等,三相定子的绕组按对称的星形分布;(2) 其气隙磁场服从正弦分布而且各次谐波忽略不计,感应电动势也服从正弦分布;(3) 永磁体的等效的励磁电流恒定不改变;电机中的涡流、趋肤效应、电机铁芯饱和和磁滞损耗的影响均忽略不计;温度与频率不影响电机的参数。
坐标系正方向的选取: (1) 转子逆时针方向旋转为正; (2) 正向电流生出正向磁链;(3) 电压,电流的正方向按照电动机的惯例。
则静止三相坐标系里PMSM 的定子侧电压方程3333s s s s u R i p ψ=⋅+ (4-1)静止三相坐标系里PMSM 的定子侧磁链方程3333()s s s f s L i F ψψθ=⋅+⋅ (4-2) 式中,3A s B C i i i i ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3000000s R R R R ⎛⎫ ⎪=⎪ ⎪⎝⎭,3A s B C ψψψψ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 3A s B C u u u u ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3sin ()sin(120)sin(120)s F θθθθ⎡⎤⎢⎥=-︒⎢⎥⎢⎥+︒⎣⎦3331cos120cos 240100cos1201cos120010cos 240cos1201001s m l L L L ︒︒⎛⎫⎛⎫⎪ ⎪=︒︒+ ⎪ ⎪ ⎪ ⎪︒︒⎝⎭⎝⎭电机统一理论和机电能量转换告诉我们,电机的电磁力矩[37]*I m ()s s e p T n i ψ=- (4-3) 式中,*代表取共轭复数,Im 代表取虚部。
3 PMSMdq 坐标系的数学模型三相交流电机是一个耦合强、非线性、阶次高的多变量系统,它在三相静止的坐标系里的数学模型相当复杂,应用传统的控制策略对其实现交流调速有很大的困难,所以对于一般的三相交流电机常常应用矢量控制的方法,采用坐标变换,把三相交流的绕组等效变换成两相互相垂直的交流绕组或者旋转的两相直流的绕组,等效变换以后其产生的磁动势相等,系统的变量之间得到了部分的解耦,它的数学模型得到了大大简化,使得对于系统的分析和控制也简化了很多,使得它的数学模型与比较简单的直流电机类似[52]。
图4-1静止的三相和两相坐标系坐标变换采用的空间矢量位置图通常会用到如下的六种坐标变换:三相和两相正交坐标系间变换(3s/2s 变换),两相正交坐标系和三相坐标系间变换(2s/3s 变换),静止两相和旋转两相坐标系间变换(2s/2r 变换),旋转两相和静止两相坐标系间变换(2r/2s 变换),三相静止和两相旋转坐标系间变换(3s/2r 变换),两相旋转和三相静止间变换(2r/3s 变换)。
根据磁动势和功率相等的等效原则,两相与三相的合成磁动势相等,即图4-1中,两相与三相绕组的磁动势在βα、坐标轴上投影相等,即)2121(3cos 3cos 33332C B A C B A i i i N i N i N i N i N --=--=ππα (4-4))(233sin3sin3332C B C B i i N i N i N i N -=-=ππβ (4-5)其矩阵形式为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=⎥⎦⎤⎢⎣⎡C B A i i i N N i i 232302121123βα (4-6) 要使变换之后总功率保持不变,可证,匝数比应等于3223=N N 所以,可以求得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=⎥⎦⎤⎢⎣⎡C B A i i i i i 232302121132βα (4-7) 所以,三相和两相正交坐标系间变换的变换矩阵⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=2323021211322/3s s C (4-8) 又因为,0=++C B A i i i ,所以,可得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡C B A i i i i i 2222222323021211320βα (4-9) 所以,三相和0αβ正交坐标系间变换的变换矩阵为⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡---222222232302121132 (4-10) 这是一个正交矩阵,所以⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0222321222321220132βαi i i i i C B A (4-11) 所以,两相正交坐标系和三相坐标系间变换的变换矩阵⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡---=2321232101323/2s s C (4-12)图4-2 静止的两相坐标系和旋转的两相坐标系由图4-2可知⎩⎨⎧+-=+=φφφφβαβαcos sin sin cos i i i i i i qd (4-13) 其矩阵形式为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡βαβαφφφφi i C i i i i r s q d 2/2cos sin sin cos (4-14) 进而,可求得⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡q d s r q d i i C i i i i 2/2cos sin sin cos φφφφβα (4-15) 所以,静止两相和旋转两相坐标系间变换矩阵⎥⎦⎤⎢⎣⎡-=φφφφcos sin sin cos 2/2r s C (4-16) 旋转两相和静止两相坐标系间变换矩阵⎥⎦⎤⎢⎣⎡-=φφφφcos sin sin cos 2/2s r C (4-17)三相静止和两相旋转坐标系间变换的变换矩阵:3/2cos cos(120)cos(120)sin sin(120)sin(120)s rC φφφφφφ⎛⎫⎪-︒+︒⎪⎪=---︒-+︒⎪⎪⎪⎝⎭(4-18)加之 90φθ=-︒ (4-19) 变换阵可变为下面的形式3/2s i n s i n (120)s i n (120)c o s c o s (120)c o s (120)s r C θθθθθθ⎛⎫⎪-︒+︒⎪⎪=-︒+︒⎪⎪⎪⎝⎭(4-20)其逆变换矩阵是2/33/2Tr ss r C C = (4-21)所以32/32s r s r x C x = (4-22) 23/23r s r s x C x = (4-23)式中3[]Ts A B C x x x x =,20[]T r d q x x x x =(x 可以是电流i ,电压u ,也可以是磁链ψ)。
将式(4-2) 3s/2r 变换,可以得到13/233/233/23/233/23()s r s s r s s rs r s f s r s C C L C Ci C F ψψθ-=+ (4-24) 式中 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=032/3ψψψψq d sr s C ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=032/3i i i i C q d s r s 13/233/2s r s s r C L C -33sin sin(120)sin(120)10.50.5100cos cos(120)cos(120)0.510.50100.50.51001m l L L θθθθθθ⎛⎫⎪-︒+︒⎧--⎫⎛⎫⎛⎫⎪⎪⎪ ⎪ ⎪⎪=-︒+︒⨯--+⎨⎬⎪ ⎪⎪⎪⎪ ⎪ ⎪--⎝⎭⎝⎭⎩⎭⎪ ⎪⎝⎭33333 sin sin(120)sin(120) 1.500cos cos(120)cos(120)0 1.5000Tm lm llL LL LL θθθθθθ⎛⎫⎪-︒+︒+⎛⎫⎪ ⎪⎪-︒+︒=+⎪⎪ ⎪⎝⎭⎪⎪⎝⎭3/23()f s r sC Fψθ设3331.5d m lL L L=+,3331.5q m lL L L=+,033lL L=(4-25) 则,0dq坐标系中定子侧的磁链方程为33030001.5000000d d dq q q flL iL iL iψψψψ⎡⎤⎛⎫⎡⎤⎡⎤⎪⎢⎥⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎢⎥⎪⎢⎥⎢⎥⎢⎥⎣⎦⎝⎭⎣⎦⎣⎦(4-26) 从式(4-1)可推出A A Au R i pψ=+(4-27) 从式(4-20)至(4-23)推出sin cos)A d qx x xθθ=+(4-28) 把式(4-27)代入式(4-28)000 ()sin()cos)0d d d s q d d q s qu Ri p u Ri p u Ri pψωψθψωψθψ--++---+--=(4-29) 要使任意θ值都能使得式(4-29)成立,须满足如下条件000d d d s qq q q s du R i pu R i pu R i pψωψψωψψ=+-⎧⎪=++⎨⎪=+⎩(4-30)因为式(4-3)中的零序分量i与机电能量转换无关,所以只要考虑dq坐标系中的直轴、交轴的分量sin sin(120)sin(120)sin 1.5cos cos(120)cos(120)sin(120)0sin(120)0f fθθθθψθθθθψθ⎛⎫⎪-︒+︒⎡⎤⎡⎤⎪⎢⎥⎢⎥⎪=-︒+︒⨯-︒=⎢⎥⎢⎥⎪⎢⎥⎢⎥+︒⎣⎦⎣⎦⎪⎪⎝⎭s d qsd q j i i ji ψψψ⎧=+⎪⎨=+⎪⎩(4-31) 式(4-3)和(4-31)可推出*Im()s s e p T n i ψ=-Im{()()}p d q d q n j i ji ψψ=-+-()p d q q d n i i ψψ=-将式(4-26)代入得33(1.5())e p f q d q d q T n i L L i i ψ=+- (4-32)由上述推导可以求得dq 坐标系中三相PMSM 的定子侧电压方程为d d d s qq q q s d u R i p u R ip ψωψψωψ=+-⎧⎨=++⎩ (4-33)dq 坐标系中三相PMSM 的定子侧磁链方程为331.5d d d f q q q L i L i ψψψ=+⎧⎨=⎩(4-34)dq 坐标系中三相PMSM 的定子侧电磁转矩为33(1.5())e p f q d q d q T n i L L i i ψ=+- (4-35)式(4-33)-(4-35)中,d u ,q u 是定子电压的dq 轴分量; d i ,q i 是定子电流的dq 轴分量;R 是定子的电阻;d ψ、q ψ为定子磁链的dq 轴分量;s ω是同步电角速度; 3d L ,3q L 代表dq 轴电感分量; p n 代表极对数; f ψ代表永磁体磁链;p 代表微分算子/d dt [37]。