全自动制动功能测试系统
制动系统的检测

通过超声波探头发射超声波并接收 反射波,根据反射波的时间和强度 等信息判断制动系统内部是否存在 缺陷或裂纹。
检测步骤及注意事项
检测前准备
确保车辆处于安全停放状态,关闭发动机并拉 紧手刹。同时准备好所需的检测工具和设备。
01
测量工具检查
使用测量工具对关键部件进行尺寸测 量,并与标准值进行比对,判断其是
功能
制动系统的功能是使行驶中的汽车减 速甚至停车,使已停驶的汽车保持不 动。
制动系统组成
制动器
产生阻碍车辆运动或运动趋势的力( 制动力)的部件,包括摩擦制动器和 液力制动器。
制动传动装置
制动控制装置
产生制动动作、控制制动效果并将制 动能量分配到各车轮的装置,如制动 踏板机构、真空助力器、制动比例阀 等。
随着人工智能和机器学习技术的不断 发展,制动系统检测算法将更加智能 化和自适应化,能够实现更精准的状 态识别和故障预测。
未来制动系统检测将更加注重实时性 和在线学习能力,以适应不断变化的 车辆状态和行驶环境。
随着车辆电动化和智能化的推进,制 动系统将更加复杂和集成化,对检测 算法的要求也将更高。
对行业影响和意义
检测结果记录与分析
详细记录检测结果并进行综合分析,找出可能 存在的问题或故障点,为后续的维修和保养提 供依据。
03
CATALOGUE
制动性能评价指标与标准
制动性能评价指标
01 02
制动距离
指车辆从一定速度开始制动到完全停止所行驶的距离。它是衡量制动性 能最直观的指标,与制动器的制动力、轮胎与路面的摩擦系数以及车辆 的质量等因素有关。
范围内。
制动性能测试
在平坦的道路上进行制动性能测 试,观察车辆的制动距离、制动 时间和制动稳定性等指标,以评
汽车制动力测试设备控制系统的改造
s v n n e ip a i g te d t a i g a d r d s ly n h aa-tu th sb o g tg o p l a in e e t h si a r u h o d a p i t f c . c o
Ke wo d y r s:Co to ; t maiai n; n mi n r l Au o tz to Dy a c
另一方面, 采样保持电路采样保持力传感器信号, 然后 由板 卡采 样并 转换 成 数字 信 号 , 将 采集 到 的制 动力 并 数据交由控制软件处理。
1 改 造 方 案
该汽车制动力测试设备机械伺服机构简 图如图 1 所 示 , 工作 过程 为 电动机转 动 , 其 通过 减速 器带 动左 右 滚筒转动 , 滚筒则靠摩擦力带动放 置于其上的车轮转
T e Re o s r cin o e Co t l se f rte Au o h c n tu t f h n r o t o Sy t m o tmo i a e F re T s vc h bl Br k o c e tDe ie e
Z HANG Yo g n①
便精 度控 制 、 储 、 现测 试过 程等 。 存 重 针对原 有控 制 系统 的不 足 , 进 行 系统 改 造 设计 在
时, 就不再考虑采用单 片机 系统 了, 而是运用计算 机 软、 硬件控制技术对原有 系统进行 改造设计 , 而快 从 速、 经济地提高了该设备的自动化程度和测试精度。
汽车制动力测试设备原控制系统是单片机系统 , 仅能进行最基本 的数据测试 , 不能实现测试过程 的 自 动化 , 也不 能 动态 图形 化 展示 测 试 过 程 数 据 的变 化 情
况, 而且不 能对 测试 的大量 中间过程 数据 进行处 理 , 以
汽车制动性能检测系统的设计
( oa y 1 6 T tl 9 ) l
汽车制动性能检测系统的设计
丁 平
( 山东理工大学 交通与车辆工程学院 , 山东 淄博 2 54 ) 5 0 9 摘要 :以一个实际的设计案例 . 讨严格遵循相 关国家标准 、 探 技术规 范、 术条件 , 技 同时着重 于计算机控制技术 的应
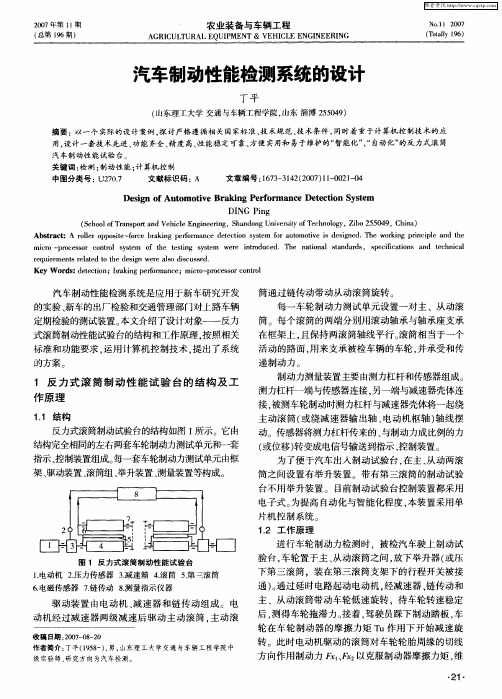
汽 车制 动性能检 测系统 是应用 于新 车研究 开发 的实验 、 车的出厂检验和交通管 理部 门对上路 车辆 新 定期检验 的测试 装置。 文介 绍 了设计对象—— 反力 本 式滚 筒制 动 陛能试验 台的结构和 工作 原理 , 照相关 按 标 准和功 能要求 , 运用计 算机 控制技 术 , 出 了系统 提
Ab t a t ol ro p st — o c r kn e fr n e d tc in s se f ra t mo ie i d s n d h r i g p n il n h s r c :A r l p o i - r e b a i g p r ma c ee t y tm o u o t s e i e 、T e wo k n r cp e a d t e e e f o o v g i mir p o e s r o t l y t m f h t s n s se c o— r c so c nr s s o te e t g y t m w r it d c d T e a in l tn a d , s e i c t n a d e h i a o e i e e n r u e . h n t a s d r s o o a p cf ai s n t c n c l i o r q i me t r lt d t h e in we ea s ic s e . e ur e n s e ae t e d sg r lo d s u s d o Ke o d : e e t n rk n e o ma c ;mi r — rc s o o t l y W r s d t ci ;b a i g p r r n e o f co p e s rc n r o o
汽车制动性能检测系统中的数据采集系统
车的制 动性 能 关系 到人 的安 全 , 汽 车 行 驶 的重 要 是 保 障 。汽 车 的 制 动 性 能 是 由 汽 车 的 制 动 系统 决 定 的 , 制动 过程 是很 复杂 的 , 与汽 车总 布置 和制 动 其 它 系统 各参数 选 择有关 。随着道 路质 量 的提高 和高 等 级 公路 的快 速 发展 , 车行 驶速 度越 来越 快 , 汽 因此对 汽 车制 动性 能 的要求 越来 越严 格 。 利 用现 代 电子技 术开 发集 成化 的智 能系统 是汽 车 制动 性能 检测 技术 发展 的必 然方 向 。本 文 的研 究
1 数 据 采 集 系统 总体 结 构 设 计
数据 采 集系统 的基 本组 成 如图 1所示 。在 由微 机 与单 片机组 成 的检 测 控 制 系统 中 , 为数 据 采 集 作
系统 的单 片机 是前 端 处 理 机 , 责 数 据 的采 集 和 就 负
地 控制 , 将状 态信 息 和处理 结果 上传 给 主控机 , 并 以 便 主控机 作进 一步 的处 理 。数 据采 集 系统硬 件部 分
运行 可 靠 , 操作 方便 , 高 了检 测精度 与检 测速 度 。 提 关键 词 : 动 ; 制 检测 ; 据采 集 数
中图分 类号 : P 7 T 23
文献标 识码 : A
文章编 号 :0 1 2 7 2 0 ) l 0 5 3 1 0 —2 5 (0 8 l 一0 4 一O
Absr c : i pe n l e s a d d v l p t ta t Th s pa r a a yz r n e e o he d t o l c i y t m f a o o l S r ke p r a a c le ton s s e o ut m bie b a e — f ma c e t y t m.The a a o lc in y t m or n e t s s s e d t c le to s s e a opt CS—51s n e—c i ir c mput ra he d sM — i gl — h p m c o o e s t CPU , The s t r o CS 一 5 i d t d b he ofwa e f r M 1 s e ie y t a s mbl l n a .The on e ue e se e a gu ge c s q nc of h t s t e e t s ows t tt e s s e h de nd bl un n nd h ha h y t m a pe a e r ni g a s ha dy m a i l to whih i n n pu a in, c mpr v het s u lt o e t e tq a iy a fii n y nd e fce c . Ke r s: r ke; e t d t o lc i y wo d b a t s ; a a c le ton
汽车制动性能检测系统的研究

器, 通过 联 轴 节 与 初测 滚 筒 轴 连 接 , 轴 角 将 数 据 采 集 的 一段 程 序 , 序 提 纲 罗 列如 下 : 程 位 移转 换成 2 0 P/r A、 50 的 B两相 数字 脉 冲 , v i C tbe Viw: O tSa t) od S a l2 e : nC r t r( 当顺 时 针 方 向旋 转 时 , A信号 超 前 于 B信 号 { / T O: 添加 命令 句柄 代码 / OD 9 。 时还 输 出一 路零 脉 冲 信 号 , 为零 位 0同 作 // S e 1 注 册设备 tp : 标 记 , 系统 只 检 测 速 度 , z 信 号 可 不 该 故 相 // tp : 置 设 备 S e 2 配 用。 // S e 3: tp 采集 数据 // tp se 4: 处理 数据 ( 送) 发 3数据采集与处理 // S e 5: tp 释放 设备 DRV D vc Cl e HJ - I 角位 移传 感 器将 物理 量转 化 W I 型 e ie o ( s &Drv r n l) } ie Ha de ; 4 3试 验结果 与处 理 . 为 电 信 号 , 而 直 接 的 电 信 号 是 无 法被 计 然 实 验 系 统 在 制 动 期 间 , 机 高 速 采 集 微 算 机识 别的 , 以 在测 试 过 程 中 需 要PC - 所 I , l 1 L 据 采集 控 制卡 进 行A/ 转 换 , 模 左 右滚 筒 编码 器 脉 冲计 数 值 n 和 n 直 至 7 数 l D 将 拟量转化为数字量 。 左 右 滚 筒 完 全停 止时 , 据 采 集 总 数 N个 。 数 ‘ 左右 编码 器 的脉 冲 PCI 7 l 一1 l 数据 采 集卡 。 I 7 1 1 设 采 样 频 率 为 ,赫 兹 , PC -1 l 是 2 左 左 位 的 低 损 耗 多 功 能 采 集 卡 , 有 独 特 的 电 线 数 都 为 , 右 滚 筒 半 径 都 为R米 , 右 具 左 路 设 计 和 完 善 的数 据 采 集 与 控 制 功 能 , 支 滚 筒 的 中心 距 为 S 、 制动 ,右 持即插即用, 有 l通道单端模/ 具 6 数输 入 、 转 动惯 量 为 , 制 1通道数字I 6 /O和2 道 数 模 输 出 , 通 采集 速 距 离 左 右 为 , 动 距 离 差 △ 及 左 右 跑 率 可达 1 0 Hz 可编程 的 计数 / 时 器可 作 偏 量 的计 算式 为 : 0k , 计 为 A/ D转 换 的 速 度 触 发 。 内部 结 构 主 要 有 单 端 模 拟 输 入 通 道 、 拟 输 出通 道 和触 发 模
全电路制动BBW
全电路制动BBW简介全电路制动(全称:全车主动制动系统,英文缩写:BBW)是一种先进的汽车制动系统。
它通过电子控制单元(ECU)和传感器等组件,实现车辆刹车的精确控制。
本文将介绍全电路制动系统的原理、结构、工作原理以及优势。
原理全电路制动系统是一种电子控制的制动系统,它基于车辆的速度、转向以及其他传感器信号,通过计算实时制动需求,控制制动器的输出力和制动力分配。
结构全电路制动系统的结构主要由以下几部分组成: - 电子控制单元(ECU):负责接收传感器信号,计算制动需求,并控制制动力分配; - 刹车控制器:将ECU的信号转化为适当的控制输出,用于调整制动器的压力; - 制动器:将制动力转化为刹车力,实现车辆的制动功能; - 传感器:用于检测车辆的速度、转向等信息,并将其传输到ECU进行处理。
工作原理全电路制动系统的工作原理可以简单分为以下几个步骤:1. 传感器检测:车辆的传感器会实时监测车速、转向和其他相关信息,并将这些数据传输到ECU。
2. 数据处理:ECU通过接收传感器信号,并结合预设的制动算法,计算出当前的制动需求。
3. 制动力分配:ECU根据计算出的制动需求,通过控制刹车控制器输出适当的控制信号。
4. 制动器调整:刹车控制器接收到ECU的信号后,将信号转化为适当的控制输出,用于调整制动器的压力。
5. 刹车力产生:制动器接收到刹车控制器的输出信号后,将制动力转化为刹车力。
6. 刹车控制:车辆根据制动力产生的刹车力来实现制动效果,保证行车安全。
优势相比传统的液压刹车系统,全电路制动系统具有以下几个优势: 1. 精确控制:全电路制动系统通过电子控制,能够更准确地计算和控制制动需求,提供更精确的刹车力分配。
2.反应迅速:全电路制动系统的电子控制单元能够实时接收和处理传感器信号,使得制动反应更迅速,大大提升了驾驶安全性。
3. 自适应性强:全电路制动系统能够根据车速、转向等信号的实时变化来自动调整制动力分配,使得制动效果更加稳定和可靠。
智能集成制动系统的硬件在环测试
现代电子技术Modern Electronics TechniqueDec. 2023Vol. 46 No. 242023年12月15日第46卷第24期0 引 言近年来,随着新能源汽车的普及与发展,比亚迪、蔚来、特斯拉等新能源车企迅速崛起,车辆智能化的提升等相关技术快速发展,作为基础的线控制动技术也得到了迅猛的发展[1]。
智能集成制动系统将助力器和车身电子稳定系统(Electronic Stability Program, ESP )集成为一体,加强了系统的集成化以及轻量化,留出更多的空间用于提升新能源车辆的续航[2]。
随着更多传感器以及电子控制单元(ECU )的介入,制动系统的功能逻辑也逐渐复杂,因此对智能集成制动系统的检测需要比传统模式更先进的检测手段[3‐4]。
硬件在环(Hardware ‐in ‐the ‐Loop, HIL )作为汽车系统V 模式流程的验证环节,具有同步开发、极限与破坏性试验、可复现、全面快捷的优DOI :10.16652/j.issn.1004‐373x.2023.24.030引用格式:符峥,王学影,范伟军,等.智能集成制动系统的硬件在环测试[J].现代电子技术,2023,46(24):170‐176.智能集成制动系统的硬件在环测试符 峥1, 王学影1, 范伟军1, 张霖成2(1.中国计量大学 计量测试工程学院, 浙江 杭州 310018; 2.杭州沃镭智能科技股份有限公司, 浙江 杭州 310018)摘 要: 针对智能集成制动系统在研发测试阶段使用实车测试时整改成本高、周期较长、复现性差的问题,通过分析智能集成制动系统的结构和原理,建立整车的数学模型,设计一套基于NI VeriStand 硬件在环系统的智能集成制动系统实时仿真测试平台,通过搭建车辆的实时仿真模型代替实际车辆对控制器进行实时仿真测试。
通过基础制动测试,完成了助力器的建压能力以及基本运行逻辑的检测;通过完成相应条件激活ABS 、TCS 功能,检测特殊工况下制动系统在各个轮端的建压情况。
车辆制动性能检测系统
gb7528-2004《机动车安全运行技术条件》中定义制动协调时间是从驾驶员踩下制动踏板的瞬间作为起始计时点,为此,在制动测试过程中必须由驾驶员通过套装在汽车制动踏板上的脚踏开关向试验台指示、控制装置发出一个“开关”信号,开始时间计数,直至制动力与轴荷之比达到标准规定值的75%时瞬间为止。这段时间历程即为制动协调时间,通常可以通过检验台的计算机执行相应程序来实现。
3.车轮与滚筒表面间附着系数
汽车轮胎和滚筒间的附着系数直接影响检测效果:越大,试验台测力能力也越大;不同,制动力检测结果也不同。有关标准规定,不得低于0.65。值与滚筒表面的材质和形状有关,采用高硅合金铸铁滚筒、金属网石英颗粒涂塑等材质的滚筒,值均可达0.7~0.8,具有良好的实际道路模拟效果,但对轮胎磨损较严重。国内制造的制动试验台Байду номын сангаас部分为钢质滚筒,表面粘有熔烧铝矾土砂粒,多为0.8~0.9之间,滚筒材质要求不高,工艺简单,经济性好,受气温和湿度的影响小,对轮胎磨损较小。
车辆制动性能检测系统
[摘要]车制动过程中的制动时间、跑偏量对汽车行车时的安全性有着至关重要的作用,本文对反力式制动系统检测试验台进行了详细、全面的研究。本文参考及查阅大量相关文献资料,基于现有汽车制动性能检测系统的研究成果,设计采用反力式滚筒检测平台,并通过适当的计算、修改以及重建,构建完成制动性能检测系统。
2.安置角
从图中的几何关系可以得出安置角。安置角与被检车轮直径d、滚筒中心距l及滚筒直径d有关,其对检测结果的影响很大。同一制动试验台,当整车质量相同,车轮直径较小时,安置角较大,制动力测量值也偏大。对于滚筒中心距和直径固定不变的制动试验台(也有部分可调的),如果检测不同类型的车辆,则由于轮胎直径的不同,安置角也不同,会出现检测误差。适当加大安置角对检测有利,但不是越大越好,因为当安置角增大时轮胎变形增大,阻滞力会相应增加。
汽车自动紧急制动系统行人测试与评价方法
J Automotive Safety and Energy, Vol. 11 No. 3, 2020296—304汽车自动紧急制动系统行人测试与评价方法林国庆,逯 超,韩龙飞,王睿希(长安大学汽车学院,西安710064,中国)摘要:为了建立符合中国交通状况和驾驶员驾驶行为的汽车自动紧急制动系统(AEB)完整的测试与评价方法,本文利用中国交通事故深入研究(CIDAS)乘用车事故数据,借鉴国内外研究成果,参考中国新车评价规程(C-NCAP)中的AEB行人测试方法,制定出符合中国国情的汽车自动紧急制动多种不同行人(AEB-P)测试工况。
引入层次分析法(AHP)搭建AEB-P层次模型,确定了适用于测试和评价AEB-P测试场景及各场景对应的权重系数,利用自动驾驶仿真软件PreScan对所提测试场景进行建模。
结果表明:通过引入碰撞时间(TTC)、相对距离和速度减少量作为AEB-P的评价指标并给予不同的权重,在PreScan中对提出的测试场景建模,提出的AEB-P测试与评价方法的合理性和实用性得到了验证。
关键词:汽车主动安全;行人自动紧急制动系统(AEB-P);测试与评价;层次分析法(AHP);虚拟测试中图分类号: U 467.1+4 文献标识码: A DOI: 10.3969/j.issn.1674-8484.2020.03.004 Test and evaluation method of pedestrian automatic emergencybraking systemLING Guoqing, LU Chao, HAN Longfei, WANG Ruixi(Chang’an University, Xi’an 710064, China)Abstract: A variety of pedestrians autonomous emergency braking system (AEB-P) test conditions was formulatedto establish a complete test and evaluation method of autonomous emergency braking system (AEB) in line withChina's traffic conditions and driver's driving behavior by using China in-depth accident study (CIDAS) passengercar accident data, drawing lessons from domestic and foreign research results and referring to AEB pedestrian test method in China new car assessment programme (C-NCAP). The AEB-P hierarchical model was established with introducing the analytic hierarchy process. And the weight coefficients was built up, which was suitable for testingand evaluating AEB-P test scenarios and the corresponding scenarios. The results show that the proposed AEB-Ptest and evaluation method are verified to be reasonable.Key words: v ehicle active safety; pedestrians collision avoidance system (AEB-P); testing and evaluation;analytic hierarchy process (AHP); virtual testing收稿日期 / Received :2020-02-12。
硬件在环仿真的汽车制动控制器测试系统
硬件在环仿真的汽车制动控制器测试系统摘要:伴随着我国经济发展,我国汽车产业也在不断的创新与发展,与此相关的车辆电子控制系统技术也在迅速的成长和发展。
为此,我们也在寻找一个相对准确,快速便捷的测试系统。
硬件在环仿真(HILS)的技术也就此而生,对我国汽车制动控制系统的测试起到了极大的帮助。
关键词:汽车产业;硬件在环仿真;制动控制;测试系统1 引言随着电子信息技术的日渐发展,我们已经不满足与传统的实车道路测试,转而寻找一种新型的,准确的实验方法,希望能够取代传统的测试方法。
而硬件在环仿真(HILS)技术的诞生,恰恰满足了我们对新型测试技术的需求。
不同于传统实车道路测试,硬件在环仿真(HILS)技术运用仿真技术模拟实际的工作环境,它可以不受时间限制和环境限制,按照特定的指令,进行有目的的可控可循环的测试。
2 硬件在环仿真技术的作用原有系统中的测试精确度,和对影响测试环境的部件,黑匣子部件的测试准确度都远远不及硬件在环仿真(HILS)技术。
硬件在环仿真(HILS)技术运用采用物理元件的代替原有测试系统部件,仿真测试可以大大提高测试的准确度。
车辆制动控制系统隶属于车辆底盘的电子系统,就目前而言,大众常常较为熟悉的是制动防抱死系统(ABS),电子制动力分配(EBD)以及电子稳定控制系统(ESC)等。
硬件在环仿真(HILS)技术已经成为产品生产重要的辅助技术,如在包含两个季节的实际车辆测试,受着气候影响和多种道路等多重影响下的制动防抱死系统(ABS)中;在难度大,时间长的牵引控制能力,影响车辆速度等方面的电子稳定控制系统(ESC)中等。
除此之外硬件在环仿真(HILS)技术还有辅助上坡起步作用,紧急制动作用等延展性的辅助作用,硬件在环仿真(HILS)技术只会越来越丰富多彩,以生产方满足对产品生产的技术需求,使硬件在环仿真(HILS)技术成为重要的生产基础和不断的发展。
3 汽车制动系统的硬件在环仿真(HILS)的测试系统简介制动控制在环仿真(HILS)测试系统主要包括了故障模拟与诊断、快速性能评估和控制策略开发,这几个方面主要由以下四个方面组成:(1)上机位(2)制动控制器(3)DSPACE仿真器(4)测试台架辅助设备制动控制在环仿真(HILS)系统如图一所示:图一制动控制在环仿真(HILS)测试系统原理图3.1 上机位车辆模型的构造会大量运用到上机位,比如以下几点:(1)输出输入的控制(2)动态地显示(3)数据的采集(4)仿真测试的结果(5)数据的储存(6)后台的处理分析MSC公司专门设计了CARSIM软件,是多种车辆的仿真处理工具,CARSIM软件可以和MATLAB/SIMULINK等软件进行连接,通过RT FOR DSPACE扩展模块,建立车辆动态仿真运动,可以使车辆的物理元件与控制台进行数据的传输与互动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
书山有路勤为径;学海无涯苦作舟
全自动制动功能测试系统
Messring公司开发的AEB测试系统由模拟前车的“目标”和导向轨
道组成
应ADAC(欧洲汽车协会)的要求,Messring公司从2013年初就开
始着手将用于测试自动制动系统(AEB)的设备在全球推广。
在开始推广
该测试系统之后不久,Messring公司开发的产品在全球范围内已经变得非常成功,并且被很多的OEM厂商所采用。
保险公司、政府机构和消费者保护组织也将这种AEB测试设备作为AEB测试领域的标准产品。
ADAC从2012年起开始试图推广AEB测试设备,2013年7月,Euro-NCAP也把对AEB的测试列为汽车安全测试的墙纸项目。
主动安全系统(ADAS)会在必要时采取行动,避免潜在的危险,保
护乘员的生命财产安全。
根据预设的算法,AEB向驾驶员发出“可能发生
碰撞”的警告,以此帮助驾驶员在紧急情况下最大限度地发挥制动系统的
作用。
此外,AEB也能在危险情况下主动采取制动操作而无需驾驶员控制。
AEB测试系统主要由两个部分组成:外观像是车辆尾部的部分被称为“目标”;另一部分是由坚固的材料制成的导轨系统,用于让“目标”在上面
运动,轨道系统有一台拖挂车辆牵引,最高时速可达80km。
坚固的金属导轨保证了测试设备的可控线性运行。
由于这套设备便于拆装、配置方便以
及测试侠效率很高,使其几乎是唯一被NCAP机构完全认同的AEB测试设
专注下一代成长,为了孩子。