手拉手模型
(完整版)全等平行四边形模型之手拉手模型
(完整版)全等平行四边形模型之手拉手模
型
简介
本文档介绍了全等平行四边形模型中的手拉手模型,提供了其
定义、特点、应用以及相关实例,帮助读者更好地理解和应用该模型。
定义
全等平行四边形是指具有相等边长和相等角度的两个平行四边形。
手拉手模型是全等平行四边形模型中的一种构造方式,通过连
接两个全等平行四边形的对应点,形成一个类似于"手拉手"的形状。
特点
手拉手模型具有以下特点:
1. 两个全等平行四边形的对应点直线段相等。
2. 手拉手模型中的对应角度相等。
3. 手拉手模型的两个平行四边形互补。
应用
手拉手模型在几何学和物理学中有广泛的应用:
1. 几何学应用:手拉手模型可以用来证明全等平行四边形的性质,解决相关几何问题。
2. 物理学应用:手拉手模型可以通过模拟力的平衡和力矩的原理,帮助解决物理学中的平衡问题。
示例
以下是一个手拉手模型的示例应用:
假设有两个全等平行四边形ABCD和EFGH,其中AB和EF
是对应边。
我们可以通过连接A和E,B和F,C和G,D和H来
构造一个手拉手模型。
根据手拉手模型的特点,我们可以得出对应
点直线段AE,BF,CG和DH相等,对应角度也相等。
结论
手拉手模型是全等平行四边形模型中的一种构造方式,具有对
应点直线段相等、对应角度相等的特点。
它在几何学和物理学中有
广泛的应用,能够帮助解决相关问题。
通过了解手拉手模型的定义、特点和应用,读者可以更好地理解和运用该模型。
完整版)全等三角形之手拉手模型

完整版)全等三角形之手拉手模型
本文将介绍手拉手模型中的全等三角形。
所谓手拉手模型,是指有公共顶点的两个等腰三角形,顶角相等。
因为顶点相连的四条边,形象的可以看作两双手,所以通常称为手拉手模型。
基本模型如下:已知,△ABB'和△ACC'都是等腰三角形,AB=AB',AC=AC',且∠BAB'=∠CAC'。
可以得出三个结论:结论1:△ABC≌△AB'C'(SAS),BC=B'C';结论2:
∠BOB'=∠BAB';结论3:AO平分∠BOC'。
在共顶点的等腰直角三角形中,也可以应用手拉手模型。
例如,如下图所示,△ABC和△ADE是等腰直角三角形,且
∠BAC=∠DAE=90°。
可以证明:⑴BD=CE⑵BD⊥CE。
另外,在共顶点的等边三角形中,也可以使用手拉手模型。
如下图,点A为线段BD上一点,△ABC和△ADE均是等边
三角形。
可以求出:(1)CD=BE;(2)∠DAE+
∠BFD=180°;(3)∠BFA=∠DFA=60°。
总之,手拉手模型在全等三角形的证明中是一个非常有用的工具,能够帮助我们更好地理解和应用三角形的性质。
全等典型模型:“手拉手”模型

《三角形证明》题型解读12 全等典型模型:“手拉手”模型【知识梳理】(一)“手拉手模型”的基本图形题型特征:△ABC 与△BDE 是等边三角形,A 、B 、D 三点在同一直线上。
解题方法:一定有以下六个结论(三组全等、一个60°、一个等边△、一组平行线) ①△ABE ≌△CBD证明过程:∵△ABC 与△BDE 是等边三角形,∴∠1=∠2=∠3=60°,∴∠ABE=∠CBD=120°,∵AB=BC ,BE=BD , ∴△ABE ≌△CBD (SAS ) ②△ABH ≌△CBF证明过程:∵△ABE ≌△CBD ,∴∠4=∠5,∵AB=BC ,∠1=∠2,∴△ABH ≌△CBF (SAS ) ③△BHE ≌△BFD证明过程:∵△ABE ≌△CBD ,∴∠6=∠7,∵BE=BD ,∠2=∠3,∴△BHE ≌△BFD (SAS ) ④∠AGC=60°证明过程:∵△ABE ≌△CBD ,∴∠6=∠7,在△GFE 和△BFD 中(“8”字模型),∠3=180°-∠BFD-∠7,∠EGF=180°-∠GFE-∠6,∵∠6=∠7,∠GFE=∠BFD ,∴∠3=∠EGF ,∵∠AGC=∠EGF ,∠3=60°,∴∠AGC=∠3=60° ⑤△BHF 是等边三角形证明过程:∵△BHE ≌△BFD (SAS ),∴BH=BF ,∵∠2=60°,∴△BHF 是等边三角形(有一个角是60°的等腰三角形是等边三角形) ⑥HF//AD证明过程:∵△BHF 是等边三角形,∴∠8=60°,∵∠3=60°,∴∠8=∠3,∴HF//AD (二)“手拉手模型”的变化图形题型特征:△ABC 与△BDE 是等边三角形,A 、B 、D 三点不在同一直线上。
图2M N 765431H GFEDCBA765431HG F ED CBA解题方法:一定有以下三个结论(一组全等,一个60°、一个角平分线) ①△ABE ≌△CBD证明过程:∵△ABC 与△BDE 是等边三角形,∴∠1=∠3=60°,∴∠ABE=∠CBD (共角模型),∵AB=BC ,BE=BD , ∴△ABE ≌△CBD (SAS ) ②∠AGC=60°证明过程:∵△ABE ≌△CBD ,∴∠6=∠7,在△GFE 和△BFD 中(“8”字模型),∠3=180°-∠BFD-∠7,∠EGF=180°-∠GFE-∠6,∵∠6=∠7,∠GFE=∠BFD ,∴∠3=∠EGF ,∵∠AGC=∠EGF ,∠3=60°,∴∠AGC=∠3=60° ③BG 平分∠HBF证明过程:作BM ⊥AE 于点M ,BN ⊥GD 于点N ,如图2,∵△ABE ≌△CBD ,∴∠4=∠5,∵AB=BC ,∠AMB=∠CNB=90°,∴△ABM ≌△CBN (AAS ),∴BM=BN ,∴BG 平分∠HBF (到角两边的距离相等的点,在这个角的角平分线上) (三)常见“手拉手”变化图形【典型例题】例1.如图,C 为线段AE 上一动点(不与A 、E 重合),在AE 同侧分别作等边△ABC 和等 边△CDE ,AD 与BE 交于点O ,AD 与BC 交于点P ,BE 与CD 交于点Q ,连接PQ ,以下五个结论: ①AD =BE ;②PQ ∥AE ;③CP =CQ ;④BO =OE ;⑤∠AOB =60°,恒成立的结论有( )。
专题12.19 三角形全等几何模型-“手拉手”模型(知识讲解)
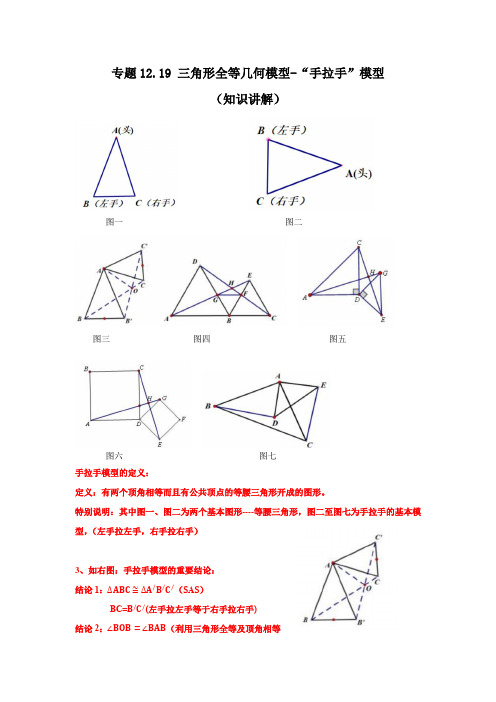
专题12.19 三角形全等几何模型-“手拉手”模型(知识讲解)图一图二图三图四图五图六图七手拉手模型的定义:定义:有两个顶角相等而且有公共顶点的等腰三角形开成的图形。
特别说明:其中图一、图二为两个基本图形----等腰三角形,图二至图七为手拉手的基本模型,(左手拉左手,右手拉右手)3、如右图:手拉手模型的重要结论:结论1:∆ABC≅∆A/B/C/(SAS)BC=B/C/(左手拉左手等于右手拉右手)结论2:∠BOB=∠BAB(利用三角形全等及顶角相等的等腰三角形底角相等)结论3:AO平分∠B O C/(利用三角形全等面积相等,再利用角平分线性质定理证明)典型例题讲练:在学习全等三角形知识时、教学兴趣小组发现这样一个模型:它是由两个共顶点且顶角相等的等腰三角形构成.在相对位置变化的同时,始终存在一对全等三角形.通过资料查询,他们得知这种模型称为“手拉手模型” 兴趣小组进行了如下操究:(1)如图1、两个等腰三角形△ABC和△ADE中,AB=AC,AE=AD,△BAC=△DAE,连接BD、CE、如果把小等腰三角形的腰长看作小手,大等腰三角形的腰长看作大手,两个等腰三角形有公共顶点,类似大手拉着小手,这个就是“手拉手模型”,在这个模型中,和△ADB 全等的三角形是,此线BD和CE的数量关系是(2)如图2、两个等腰直角三角形△ABC和△ADE中,AB=AC,AE=AD,△BAC=△DAE=90°,连接BD,CE,两线交于点P,请判断线段BD和CE的数量关系和位置关系,并说明理由:(3)如图3,已知△ABC、请完成作图:以AB、AC为边分别向△ABC外作等边△ABD和等边△ACE(等边三角形三条边相等,三个角都等于60°),连接BE,CD,两线交于点P,并直接写出线段BE和CD的数量关系及△PBC+△PCB的度数、【答案】(1)△AEC,BD=CE;(2)BD=CE且BD△CE,理由见解析;(3)作图见解析,BE=CD,△PBC+△PCB=60°.【分析】(1)根据SAS证明两个三角形全等即可证明;(2)通过条件证明△DAB△△EAC(SAS),得到△DBC+△ECB=90°,即可证明BD△CE,从而得到结果;≅即可得到证明;(3)根据已知条件证明DAC BAE解:(1)△AB=AC,AE=AD,△BAC=△DAE,∠+∠=∠+∠,△DAE EAB BAC EAB即DAB EAC ∠=∠,△()△△ADB AEC SAS ≅,△BD=CE ;(2)BD=CE 且BD△CE ;理由如下:因为△DAE=△BAC=90°,如图2.所以△DAE+△BAE=△BAC+△BAE .所以△DAB=△EAC .在△DAB 和△EAC 中,,,.AD AE DAB EAC AB AC =⎧⎪∠=∠⎨⎪=⎩所以△DAB△△EAC (SAS ).所以BD=CE ,△DBA=△ECA .因为△ECA+△ECB+△ABC=90°,所以△DBA+△ECB+△ABC=90°.即△DBC+△ECB=90°.所以△BPC=180°-(△DBC+△ECB )=90°.所以BD△CE .综上所述:BD=CE 且BD△CE .(3)如图3所示,BE=CD ,△PBC+△PCB=60°.由图可知60DAB EAC ∠=∠=︒,AD=AB ,AE=AC ,△+DAB BAC EAC BAC ∠∠=∠+∠,即DAC BAE ∠=∠,△()△DAE △BAE SAS ≅,△BE=CD ,ABE ADC ∠=∠,又△60BDA ∠=︒,△60ADC BDC ABE BDC ∠+∠=∠+∠=︒,△120BPC ABP BDC BDA ∠=∠+∠+∠=︒,△△PBC+△PCB=60°.【点拨】本题主要考查了全等三角形的知识点应用,准确分析图形是解题的关键. 举一反三变式1:如图,AC △BC ,DC △EC ,AC =BC ,DC =EC ,AE 与BD 交于点F .(1)求证:AE =BD ;(2)求△AFD 的度数.【答案】(1)详情见解析;(2)90AFD ∠=︒【分析】(1)利用角的等量代换求出ACE BCD ∠=∠,再判断ACE ≌BCD △即可求解; (2)利用全等三角形的性质得到E D ∠=∠,再通过角的等量代换求解即可.解:(1)△AC BC ⊥,DC EC ⊥△90ACB ECD ∠=∠=︒△ACB BCE ECD BCE ∠+∠=∠+∠△ACE BCD ∠=∠在ACE 和BCD △中AC BC ACE BCD DC EC =⎧⎪∠=∠⎨⎪=⎩△ACE ≌BCD △(SAS)△AE BD =(2)设BD 与CE 的交点为G ,如图所示:△ACE ≌BCD △△E D ∠=∠△180EFG FGE E ++=︒∠∠∠,180GCD CGD D ++=︒∠∠∠,且BGE CGD ∠=∠△90EFG GCD ==︒∠∠△90AFD ∠=︒【点拨】本题主要考查了全等三角形的性质和判定,灵活运用角的等量代换是解题的关键.例题2.已如:如图1,B ,C ,D 三点在一条直线上,△ABC 和△ECD 均为等边三角形,连接BE ,AD 交于点F ,BE 交AC 于点M ,AD 交CE 于点N .(1)以下结论正确的有 ;△AD =BE △△EFD =60° △MC =NC △△AMB =△END(2)探究:将图1中的△ECD 绕点C 顺时针旋转一个角度(旋转角小于60°),如图2所示. △问:(1)中的正确结论哪些还成立?若成立,请说明理由;△连接FC ,如图3所示,求证:FC 平分△BFD【答案】(1)△△△;(2)△ △△;△见解析.【分析】(1)△根据等边三角形的性质得CA =CB ,CD =CE ,△ACB =60°,△DCE =60°,则△ACE =60°,利用“SAS ”可判断△ACD △△BCE ,则AD =BE ;△根据三角形外角关系得△EFD =△EBC +△ADC =△DAC +△ADC =△ACB =60°,从而可得结论; △连接MN ,证明△MCN 是等边三角形即可得出结论;△60,60AMB EBC END NDC ∠=︒+∠∠=︒+∠,而AC ≠CD 得CAD CDA ∠≠∠,从而可得出结论;(2)△方法同(1),逐个结论进行证明即可;△作,CG BE CH AD ⊥⊥于点G ,H ,证明△BGC △△AHC ,△CGF △△CHF 可得△CFG CFH =∠,从而可得结论.解:(1)△△ABC ,△ECD 是等边三角形,△AC=BC ,CE=CD ,△ACB=△ECD=60°△△ACD=△BCE=△120°△△ACD△△BCE△AD=BE ,故△正确;△△FEN=△NDC又△△ENF=△CND△△EFD=△ECD=60°,故△正确;又△△ACE=△NCD=60°△MEC=△NDCEC=CD△△EMC△△DNC△MC=NC ,故△正确;又△△AMB=△ACB+△ECB=60°+△ECB ,△END=△ECD+△NDC=60°+△NDC而AC CD ≠△CAD CDA ∠≠∠△MBC NDC ∠≠∠△MBC END ∠≠∠,故△错误;故答案为:△△△;(2)△△ACB=△ECD=60°△△BCE=△ACD又AC=BC ,CE=CD△△ACD△△BCE△AD=BE,故△正确;△△ADC=△BEC又△ENF=△CND△△EFD=△ECD=60°,故△正确△△ACE≠60°=△ECD△△EMC 不全等于△DNC ,△MC≠NC ,故△错误(3),CG BE CH AD ⊥⊥于点G ,H ,如图,由(2)△知,△CBG=△CAHAC=BC△BGC=△AHC=90°△△BGC△△AHC△CG=CH又CF=CF ,△CGF=△CHF=90°△△CGF△△CHF△△CFG=△CFH△FC 平分△BFD【点拨】本题考查了全等三角形的判定与性质:判定三角形全等的方法有“SSS ”、“SAS ”、“ASA ”、“AAS ”;全等三角形的对应边相等.也考查了等边三角形的判定与性质.举一反三变式:如图,在ABC∆中,分别以AC,BC为边作等边三角形ACD和等边三角形BCE,连接AE,BD交于点O,则AOB∠的度数为()A.100︒B.120︒C.130︒D.150︒【答案】B【分析】先证明△DCB△△ACE,求出△CAE=△CDB,再利用“8字型”证明△AOH=△DCH =60°即可解决问题.解:如图:AC与BD交于点H,△△ACD,△BCE都是等边三角形,△CD=CA,CB=CE,△ACD=△BCE=60°,△△DCB=△ACE,在△DCB和△ACE中,CD CADCB ACECB CE⎧⎪∠∠⎨⎪⎩===,△△DCB△△ACE,△△CAE=△CDB,△△DCH+△CHD+△BDC=180°,△AOH+△AHO+△CAE=180°,△DHC=△OHA,△△AOH=△DCH=60°,△△AOB=180°−△AOH=120°.故选:B.【点拨】本题考查全等三角形的判定和性质、等边三角形的性质等知识,解题的关键是正确寻找全等三角形,学会利用“8字型”证明角相等,属于中考常考题型.例题3.(阅读材料)小明同学发现这样一个规律:两个顶角相等的等腰三角形,如果具有公共的项角的顶点,并把它们的底角顶点连接起来则形成一组全等的三角形,小明把具有这个规律的图形称为“手拉手”图形.如图1,在“手拉手”图形中,小明发现若△BAC=△DAE,AB=AC,AD=AE,则△ABD△△ACE.(材料理解)(1)在图1中证明小明的发现.(深入探究)(2)如图2,△ABC和△AED是等边三角形,连接BD,EC交于点O,连接AO,下列结论:△BD=EC;△△BOC=60°;△△AOE=60°;△EO=CO,其中正确的有.(将所有正确的序号填在横线上).(延伸应用)(3)如图3,AB=BC,△ABC=△BDC=60°,试探究△A与△C的数量关系.【答案】(1)证明见解析;(2)△△△;(3)△A+△C=180°.【分析】(1)利用等式的性质得出△BAD=△CAE,即可得出结论;(2)同(1)的方法判断出△ABD△△ACE,得出BD=CE,再利用对顶角和三角形的内角和定理判断出△BOC=60°,再判断出△BCF△△ACO,得出△AOC=120°,进而得出△AOE=60°,再判断出BF<CF,进而判断出△OBC>30°,即可得出结论;(3)先判断出△BDP是等边三角形,得出BD=BP,△DBP=60°,进而判断出△ABD△△CBP(SAS ),即可得出结论.(1)证明:△△BAC=△DAE ,△△BAC+△CAD=△DAE+△CAD , △△BAD=△CAE ,在△ABD 和△ACE 中,AB AC BAD CAE AD AE ⎧⎪∠∠⎨⎪⎩=== ,△△ABD△△ACE ;(2)如图2,△△ABC 和△ADE 是等边三角形, △AB=AC ,AD=AE ,△BAC=△DAE=60°, △△BAD=△CAE ,在△ABD 和△ACE 中,AB AC BAD CAE AD AE ⎧⎪∠∠⎨⎪⎩=== ,△△ABD△△ACE ,△BD=CE ,△正确,△ADB=△AEC , 记AD 与CE 的交点为G ,△△AGE=△DGO ,△180°-△ADB -△DGO=180°-△AEC -△AGE , △△DOE=△DAE=60°,△△BOC=60°,△正确,在OB上取一点F,使OF=OC,△△OCF是等边三角形,△CF=OC,△OFC=△OCF=60°=△ACB,△△BCF=△ACO,△AB=AC,△△BCF△△ACO(SAS),△△AOC=△BFC=180°-△OFC=120°,△△AOE=180°-△AOC=60°,△正确,连接AF,要使OC=OE,则有OC=12 CE,△BD=CE,△CF=OF=12 BD,△OF=BF+OD,△BF<CF,△△OBC>△BCF,△△OBC+△BCF=△OFC=60°,△△OBC>30°,而没办法判断△OBC大于30度,所以,△不一定正确,即:正确的有△△△,故答案为△△△;(3)如图3,延长DC至P,使DP=DB,△△BDC=60°,△△BDP 是等边三角形,△BD=BP ,△DBP=60°,△△BAC=60°=△DBP ,△△ABD=△CBP ,△AB=CB ,△△ABD△△CBP (SAS ),△△BCP=△A ,△△BCD+△BCP=180°,△△A+△BCD=180°.【点拨】此题考查三角形综合题,等腰三角形的性质,等边三角形的性质,全等三角形的判定和性质,构造等边三角形是解题的关键.举一反三变式:如图,C 为线段AE 上一动点(不与点,A E 重合),在AE 同侧分别作等边三角形ABC 和等边三角形,CDE AD 与BE 交于点O ,AD 与BC 交于点P ,BE 与CD 交于点Q ,连结PQ .以下结论:①AD BE =;①//PQ AE ;①60AOB ∠=︒;①CPQ 是等边三角形,恒成立的是______.【答案】△△△△【分析】△由△ABC 和△CDE 都是等边三角形,可知AC=BC ,CD=CE ,△ACB=△DCE=60°,所以△ACD=△BCE=120°,所以△ACD△△BCE (SAS ),从而AD=BE ,故△正确;△△由△ACD△△BCE 得△CBE=△DAC ,加之AC=BC ,易得△ACB=△BCQ=60°,可证△CQB△△CPA (ASA ),从而CP=CQ ,再加之△PCQ=60°,可推出△PCQ 为等边三角形,易得△PQC=60°=△DCE ,根据内错角相等,两直线平行,可知△△正确;△结合△ACD△△BCE 和三角形的外角的性质,可得△AOB=60°,故△正确.解:△△等边△ABC 和等边△CDE ,△AC=BC ,CD=CE ,△ACB=△DCE=60°,△△ACB+△BCD=△DCE+△BCD ,即△ACD=△BCE ,△在△ACD 与△BCE 中,AC BC ACD BCE CD CE ⎧⎪∠∠⎨⎪⎩===△△ACD△△BCE (SAS ),△AD=BE ,故△正确;△△△△ACD△△BCE ,△△CBE=△DAC ,△由△ACB=△DCE=60°得△BCD=60°,△△ACP=△BCQ ,又△AC=BC ,△△CQB△△CPA (ASA ),△CP=CQ ,又△△PCQ=60°△△PCQ 为等边三角形,△△PQC=60°,△△PQC=60°=△DCE△PQ△AE故△△正确;△△△ACD△△BCE (SAS ),△△CAD=△CBE ,△△AOB=△CAD+△CEB=△CBE+△CEB ,又△△ACB=△CBE+△CEB=60°,△△AOB=△ACB=60°,故△正确.故答案为:△△△△.【点拨】本题考查了等边三角形的性质、全等三角形的判定与性质、三角形外角的性质,熟练应用三角形全等的判定是解题的关键.。
(完整版)计算机模型手拉手模型

(完整版)计算机模型手拉手模型1. 模型简介计算机模型手拉手模型是一种基于计算机科学的模型,用于描述计算机系统中各个组件之间的相互协作和通信方式。
该模型的设计灵感源自实际生活中的手拉手,形象地展示了计算机系统中各个组件之间通过通信协议进行数据交互的过程。
2. 模型结构计算机模型手拉手模型由以下几个主要组成部分构成:2.1. 手拉手接口手拉手接口是模型的核心部分,它通过模拟计算机系统中的通信协议,实现不同组件之间的连接和数据传输。
手拉手接口包含了发送和接收数据的功能,以及数据传输的控制逻辑。
2.2. 组件模块模型中的每个组件模块代表了计算机系统中的一个具体组件,例如CPU、内存、硬盘等。
每个组件模块都通过手拉手接口与其他组件进行连接,实现数据的传输和协作。
2.3. 数据线数据线是模型中的另一个重要部分,它用于在不同组件之间传输数据。
数据线不仅连接了不同组件的手拉手接口,还承载了数据的传输和传递。
3. 模型原理计算机模型手拉手模型的原理是模拟计算机系统中的数据交互过程。
当一个组件需要与另一个组件进行数据交换时,它会通过手拉手接口将数据发送给对应的组件。
接收组件收到数据后,会进行相应的处理,并通过手拉手接口将处理结果返回给发送组件。
模型通过手拉手接口和数据线的连接实现了组件之间的通信和协作。
数据线的拓扑结构可以灵活地调整,以适应不同计算机系统的需求。
4. 应用场景计算机模型手拉手模型可以被广泛应用于计算机科学领域的教学和研究工作中。
通过模型,学生可以直观地了解计算机系统中各个组件之间的数据交互方式,加深对计算机系统原理的理解。
此外,这个模型还可以作为一种通信协议的教学工具,帮助学生更好地理解通信协议的原理和实现方式。
5. 结论计算机模型手拉手模型通过形象生动的手拉手形态,展示了计算机系统中各个组件之间的通信和协作方式。
它可以被广泛应用于计算机科学教学和研究领域,有助于提升学生对计算机科学原理的理解和应用能力。
手拉手模型的判定方法

手拉手模型的判定方法摘要:一、手拉手模型概述二、手拉手模型的判定方法1.视觉判定2.力学判定3.动力学判定4.神经网络判定三、各类判定方法的优缺点对比四、手拉手模型在实际应用中的案例分析五、未来发展趋势与展望正文:一、手拉手模型概述手拉手模型,是一种模拟人类行走、跑步等动态行为的机器人运动模型。
通过模拟人类运动过程中的关节运动、肌肉收缩等生理现象,实现机器人的自主运动。
手拉手模型在机器人研究领域具有广泛的应用价值,为研究人类行走提供了有力的理论支持。
二、手拉手模型的判定方法1.视觉判定视觉判定方法主要通过分析摄像头或其他图像传感器捕捉到的图像,对机器人运动状态进行判断。
该方法依赖于图像处理技术的发展,具有较高的实时性和准确性。
但同时,受到光照、遮挡等因素的影响,视觉判定方法在实际应用中存在一定局限性。
2.力学判定力学判定方法通过对机器人运动过程中的力学参数进行监测和分析,如加速度、速度、力等,判断机器人是否达到手拉手模型。
该方法具有较高的理论依据,但测量设备和算法的要求较高,实现难度相对较大。
3.动力学判定动力学判定方法结合机器人的动力学模型,通过计算运动学参数与动力学参数之间的关系,判断机器人是否符合手拉手模型。
该方法对机器人结构和运动学参数有较高要求,但在理论分析方面具有较好的优势。
4.神经网络判定神经网络判定方法利用已训练好的神经网络模型,对机器人运动状态进行判定。
该方法具有较强的适应性和鲁棒性,能够应对各种复杂环境。
但神经网络模型的训练过程较为复杂,需要大量数据支持。
三、各类判定方法的优缺点对比1.视觉判定:优点在于实时性强、准确性高,但受光照、遮挡等因素影响;2.力学判定:理论依据充分,但对测量设备和算法要求较高;3.动力学判定:对机器人结构和运动学参数有较高要求,但在理论分析方面具有优势;4.神经网络判定:适应性强、鲁棒性好,但训练过程较为复杂,需要大量数据支持。
四、手拉手模型在实际应用中的案例分析手拉手模型在机器人领域的应用案例丰富,如无人驾驶汽车、四足机器人、人形机器人等。
(完整版)社会学模型手拉手模型
完整版)社会学模型手拉手模型1.引言社会学是研究人类社会行为、社会关系和社会机构的科学。
手拉手模型是社会学中一个重要的概念,用来描述人们在社会互动中相互协作、互惠互助的关系。
本文将介绍手拉手模型的定义、特点和应用,并探讨其在社会学研究中的意义和影响。
2.手拉手模型的定义手拉手模型是指人们在社会交往中通过相互支持、合作和互助,形成紧密的互联互动的关系。
它强调人与人之间的互惠和互助,是一种相互关联和相互依赖的社会联系模式。
3.手拉手模型的特点手拉手模型具有以下几个特点:相互支持:手拉手模型强调人们在社会交往中相互支持,通过共同的努力和帮助来实现目标。
合作互助:在手拉手模型中,人们通过相互合作和互助,共同解决问题和应对挑战。
互联互动:手拉手模型强调人与人之间的紧密联系和互动,通过交流和合作实现共同的利益。
4.手拉手模型的应用手拉手模型在社会学研究中有广泛的应用,例如:教育领域:手拉手模型可以用于描述学生之间的相互支持和合作学习的关系,促进学生的共同学习和发展。
社区发展:手拉手模型可以应用于社区组织和发展,通过组织居民之间的互助、合作和支持,提高社区的凝聚力和发展能力。
心理健康:手拉手模型可以用于描述亲密关系中的相互支持和互助,帮助个体在压力和困难时获得支持和帮助。
5.手拉手模型的意义和影响手拉手模型的应用和研究对社会学具有重要意义和积极影响:加强社会联系:手拉手模型强调人与人之间的相互关联和互助,可以加强社会联系和社区凝聚力。
促进社会发展:通过手拉手模型中的合作和互助,可以促进社会的发展和进步。
改善人际关系:手拉手模型强调相互支持和互助,有助于改善人际关系和促进个体的心理健康。
6.结论手拉手模型是社会学中的一个重要概念,用于描述人们在社会交往中相互协作、互惠互助的关系。
它强调人与人之间的相互支持、合作和互助,在教育、社区发展和心理健康等领域有广泛的应用。
手拉手模型的研究和应用对于加强社会联系、促进社会发展和改善人际关系具有重要意义和积极影响。
手拉手模型公式

手拉手模型公式
手拉手模型是数学里最常见的一种几何模型图,主要的特征就是有两个形状一样的图形,它们有着共同的顶点,可以旋转到任意角度,就像两个人手拉手一样,所以被称为手拉手模型。
它有三个基本的结论:
1、BD=CE②∠BAC=∠BFC③AF平分∠BFE。
2、BD=CE(两人的左手长度和=两人的右手长度和,很形象很容易记住)。
3、∠BAC=∠BFC(左手与右手的夹角=等腰三角形的顶角a)。
4、AF平分∠BFE。
手拉手模型是基于三角形全等,由于是两个等腰三角形,即相当于给了2组相等的对应边,那么我们只要再得到夹角相等就可以利用SAS来证明三角形全等。
而这个夹角可以利用它们相同的顶角来推导出来。
基本的证明:
手拉手模型是基于三角形全等,由于是两个等腰三角形,即相当于给了2组相等的对应边,那么我们只要再得到夹角相等就可以利用SAS来证明三角形全等。
而这个夹角可以利用它们相同的顶角来推导出来。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
手拉手模型
手拉手模型
特点:由两个顶角相等的等腰三角形所组成,并且顶角的顶点为公共顶点 结论:(1)△ABD ≌△AEC (2)∠α+∠BOC=180°
(3)OA 平分∠BOC
变形:
例1.如图,B 是线段AC 上一点,分别以AB 和BC 为边长,在直线AC 的同一侧作两个等边三角形,△ABD 和△ECB ,连接AE 和CD ,AE 与DC 交于点H ,与BD 与BE 交于点G ,F .
(1)求证:△B CD ≌△BEA ;
(2)探究△BFG 的形状,并证明你的结论.
H
F G
E
D
思考:的数量关系。
与DC AE
(2)AE 与DC 之间的夹角为︒
60
(3)DFB AGB ∆≅∆
(4)CFB EGB ∆≅∆
(5)BH 平分AHC ∠
(6)AC GF //
变式精练1:如果两个等边三角形△ABD 和△BCE ,连接AE 与CD ,证明:
(1)AE 与DC 的夹角为60°;
(2)AE 与DC 的交点设为H ,BH 平分∠AHC .
思考:DC AE =;AE 与DC 之间的夹角为︒
60
试一试继续旋转结论是否成立。
变式精练2.以点A为顶点作等腰Rt△ABC,等腰Rt△ADE,其中∠BAC=∠DAE=90°,如图1所示放置,使得一直角边重合,连接BD、CE.
(1)试判断BD、CE的数量关系,并说明理由;
(2)延长BD交CE于点F,试求∠BFC的度数;
(3)把两个等腰直角三角形按如图2放置,(1)中的结论是否仍成立?请说明理由.
练习:已知:如图①,在△AOB和△COD中,OA=OB,OC=OD,∠AOB=∠COD=50°
(1)求证:①AC=BD;②∠APB=50°;
(2)如图②,在△AOB和△COD中,OA=OB,OC=OD,∠AOB=∠COD=α,则AC与BD间的等量关系为,∠APB的大小为
2.如图,两个正方形ABCD和DEFG,连接AG与CE,二者相交于H
问:(1)△ADG≌△CDE是否成立?
(2)AG是否与CE相等?
(3)AG与CE之间的夹角为多少度?
(4)HD是否平分∠AHE?
(如果你知道勾股定理的话,请问线段AC、GE、AE、CG有什么数量关系?)。