TOOL应用及校准方法
ccs tool 使用方法

ccs tool 使用方法
如何使用CCS(Control Chart Studio)工具:
1. 下载和安装CCS工具。
你可以从官方网站或其他可靠的资源中获得CCS的安装程序。
2. 打开CCS工具,创建一个新的项目。
3. 在项目中,选择需要创建控制图的数据集。
你可以从CCS 中导入数据集,或者手动输入数据。
4. 根据你的需要选择要创建的控制图类型,如 X-Bar控制图、R控制图、S控制图等。
5. 在数据集中选择要分析的变量,并选择相应的控制限。
CCS 将根据数据和选择的控制限自动计算并绘制控制图。
6. 查看绘制的控制图,并根据图表上显示的控制限分析数据的稳定性和过程能力。
7. 对于任何异常或违反控制限的数据点,你可以选择标记、调查和处理它们。
8. CCS还提供功能强大的分析工具,如散点图、箱线图、正态性检验等,可以帮助你进一步分析数据的分布和关系。
9. 导出控制图和分析结果,以便与其他人共享或进行报告。
以上是CCS工具的一般使用方法。
具体的步骤可能会有所不同,具体取决于不同版本和配置的CCS工具。
在使用CCS之前,建议阅读相关的使用手册或参考文档,以获得更详细的指导。
visionpro calibcheckerboardtool原理

visionpro calibcheckerboardtool原理VisionProCalibCheckerboardTool是一种常用的视觉测量工具,用于机器人定位和环境建模。
该工具基于计算机视觉原理,通过检测棋盘格(checkerboard)图像的特征点,进行机器人位姿估计和环境建模。
本文将介绍VisionProCalibCheckerboardTool的原理,包括其工作流程、算法实现和关键技术。
一、工作流程1.图像采集:使用高分辨率相机采集棋盘格图像。
相机标定后,可以通过软件提供的标定板进行校准。
2.特征提取:对采集到的棋盘格图像进行处理,提取其中的特征点。
这些特征点通常包括棋盘格上的黑白格子、角点等。
3.匹配与配准:将提取的特征点与已知的棋盘格模板进行匹配,通过配准算法将图像对齐。
4.位姿估计:根据匹配的特征点,利用机器人运动学模型进行位姿估计,得到机器人当前位置和姿态。
5.环境建模:将机器人位姿信息与环境地图进行融合,构建出精确的环境模型。
二、算法实现VisionProCalibCheckerboardTool采用了一种基于特征匹配的算法,通过寻找图像中的特征点,并利用这些特征点之间的相对位置关系,估计机器人位姿。
该算法的实现主要包括以下几个关键步骤:1.特征检测:使用计算机视觉算法检测棋盘格图像中的特征点,如角点等。
2.特征匹配:将检测到的特征点与已知的棋盘格模板进行匹配,生成特征匹配对。
3.位姿估计:利用机器人运动学模型,结合特征匹配对,估计机器人位姿。
该算法通常采用基于光度立体视觉的方法,通过立体视觉获取深度信息,提高位姿估计的精度。
4.环境建模:将机器人位姿信息与环境地图进行融合,构建出精确的环境模型。
通常采用基于栅格的方法,将环境空间划分为栅格单元,并将机器人位姿信息映射到栅格单元中。
三、关键技术VisionProCalibCheckerboardTool涉及到多个关键技术,包括但不限于以下几个方面:1.相机标定与校准:通过标定板对相机进行标定和校准,确保相机成像的准确性。
激光校准仪使用方法

激光校准仪使用方法Using a laser alignment tool can be a bit overwhelming at first, but with the right instructions and practice, you can master the technique. 激光校准仪的使用起初可能有些令人生畏,但通过正确的指导和实践,您可以掌握这项技术。
It is important to familiarize yourself with the device and its functions before attempting to use it on any equipment. 在尝试在任何设备上使用之前,熟悉设备及其功能是非常重要的。
Make sure to read the user manual thoroughly and understand the safety precautions involved in using the laser alignment tool. 确保彻底阅读用户手册,了解使用激光校准仪涉及的安全注意事项。
Once you have a good grasp of the basics, you can start practicing on different objects to gain confidence and accuracy. 一旦掌握了基本知识,您可以开始在不同的物体上练习,以增加信心和准确性。
When using a laser alignment tool, it is essential to have a stable surface to place the device on. 当使用激光校准仪时,需要有一个稳定的表面来放置该设备。
Any movement or vibration can affect the accuracy of the laser beam, so make sure the tool is securely positioned before starting. 任何移动或震动都可能影响激光束的准确性,因此在开始之前,请确保该工具被安全地放置。
超低价的META工具RFtool功能的使用(中文版)

META工具软件RFTool功能的使用1.简述1.1工具介绍META(Mobile Engineering Testing Architecture)是在MTK平台中用于测试、校准、调试手机的一个开发工具,本文主要介绍其射频工具RFTool的使用方法,便于在生产维修中对手机的射频性能进行调整。
1.2 系统配置软件环境●MS Windows ME, 98, 2000 or XPThe following driver and library are needed for META factory:●NI (National Instruments) GPIB-USB driver (The driver is bundled with NI GPIB-USB device) or Agilent GPIB-USB driver.硬件环境●Generic Pentium III or above PC●Agilent 8960 or R&S CMU 200The following hardware is needed for META factory●NI or Agilent GPIB-USB device●Agilent 661x or Agilent 663x2 series power supply1.3 META的安装执行“setup.exe”进行安装,请根据安装步骤提示来进行安装,如图1-3图1图2图32.RF Tool的使用主要介绍RF Tool的PM、TX level and profile、Continuous TX功能2.1 软件的设置2.1.1打开META,先对软件的使用作相应的配置,包括串口、基带芯片型号、波特率等关键参数。
目前使用的基带芯片主要有6205B、6218,后续还会有6219,使用前根据手机的基带芯片选择正确的型号,否则使用工具软件。
图42.1.2打开数据库文件(文件名一般为DataBase..),用于调出手机的参数,注意数据库文件必须跟手机的软件版本对应,开发中心在下发新版软件时候会包括该版软件的数据库文件。
ATE_Tool工具说明书SC15-003
1. 目的介绍“MTK平台校准工具ATE_T ool ”的使用。
2. 适用范围适用于MTK平台所有型号手机的写SN号、校准、最终测试及非信令模式下的耦合测试。
3. 定义手机在出厂前必须经过写SN号、校准、最终测试、耦合测试等基本的测试,以保证其质量。
此工具就可以满足给MTK平台的手机写入SN号、校准、最终测试和非信令模式下的耦合测试。
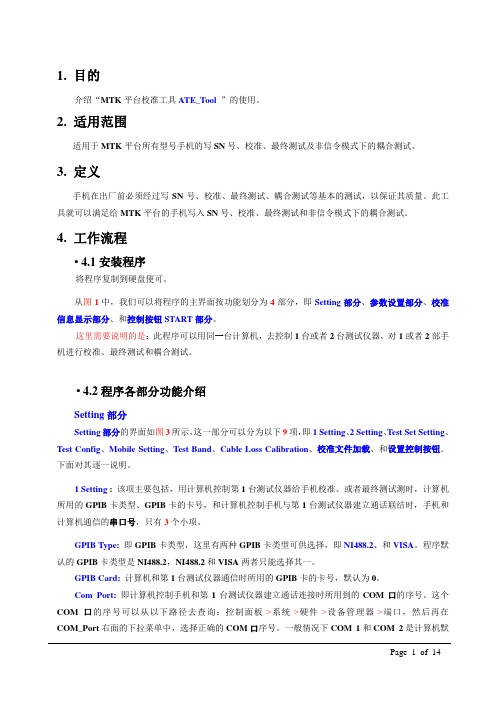
4. 工作流程• 4.1安装程序将程序复制到硬盘便可。
从图1中,我们可以将程序的主界面按功能划分为4部分,即Setting部分、参数设置部分、校准信息显示部分、和控制按钮ST ART部分。
这里需要说明的是:此程序可以用同一台计算机,去控制1台或者2台测试仪器,对1或者2部手机进行校准、最终测试和耦合测试。
• 4.2程序各部分功能介绍Setting部分Setting部分的界面如图3所示,这一部分可以分为以下9项,即1 Setting、2 Setting、T est Set Setting、T est Config、Mobile Setting、T est Band、Cable Loss Calibration、校准文件加载、和设置控制按钮。
下面对其逐一说明。
1 Setting :该项主要包括,用计算机控制第1台测试仪器给手机校准、或者最终测试测时,计算机所用的GPIB卡类型、GPIB卡的卡号,和计算机控制手机与第1台测试仪器建立通话联结时,手机和计算机通信的串口号,只有3个小项。
GPIB T ype: 即GPIB卡类型,这里有两种GPIB卡类型可供选择,即NI488.2、和VISA。
程序默认的GPIB卡类型是NI488.2,NI488.2和VISA两者只能选择其一。
GPIB Card: 计算机和第1台测试仪器通信时所用的GPIB卡的卡号,默认为0。
Com Port: 即计算机控制手机和第1台测试仪器建立通话连接时所用到的COM口的序号。
这个COM口的序号可以从以下路径去查询:控制面板->系统->硬件->设备管理器->端口,然后再在COM_Port右面的下拉菜单中,选择正确的COM口序号。
刀具测量仪如何进行校准?需要用到什么工具?

刀具测量仪如何进行校准?需要用到什么工具?在机械加工中,刀具测量仪是的设备,它可以测量切削工具尺寸和形状的高精度,为生产效率和产品质量的提高供给了紧要的保障。
但是,在使用刀具测量仪之前,需要进行校准,以确保其所得到的测量结果的精准性和牢靠性。
一、什么是刀具测量仪的校准?刀具测量仪的校准是指通过一系列标准操作来确定其测量值与真实值之间的偏差,并进行相应的调整,使其测量结果符合设计要求和规范要求,确保测量结果的精准性和牢靠性。
刀具测量仪的校准有助于降低误差并提高机床的加工精度,对于高精度的数控机床尤为必要。
二、刀具测量仪的校准方法1. 外径测量的校准方法外径测量是刀具测量仪的测量方式之一,其校准方法重要有以下几种:(1)利用标准圆柱体进行校准我们需要准备一个经过校准的标准圆柱体,并将其放置在刀具测量仪的测量范围内。
然后,我们可以通过刀具测量仪来测量标准圆柱体的外径,形成一组测量数据。
最后,通过比较测量结果和标准值之间的误差,来确定刀具测量仪的测量值与真实值之间的偏差,从而进行相应的调整。
(2)利用坐标测量机进行校准使用坐标测量机进行校准是另一种常用的方法。
首先,在坐标测量机上安装一个经过校准的夹具,然后将刀具测量仪放置在夹具上进行测量。
通过坐标测量机供给的精准明确坐标掌控,可以在不同位置对刀具测量仪进行多点测量,以确定其测量值与真实值之间的偏差,并进行相应的调整。
2. 长度测量的校准方法长度测量是刀具测量仪另一种常用的测量方式,其校准方法重要有以下几种:(1)利用标准长度条进行校准首先,我们需要准备一个经过校准的标准长度条,并将其放置在刀具测量仪的测量范围内。
然后,我们可以通过刀具测量仪来测量标准长度条的长度,形成一组测量数据。
最后,通过比较测量结果和标准值之间的误差,来确定刀具测量仪的测量值与真实值之间的偏差,从而进行相应的调整。
(2)利用激光干涉仪进行校准使用激光干涉仪进行校准是另一种常用的方法。
关于tool的用法总结大全

关于tool的用法总结大全(最新版)编制人:__________________审核人:__________________审批人:__________________编制学校:__________________编制时间:____年____月____日序言下载提示:英语语法是针对英语语言进行研究后,系统地总结归纳出来的一系列语言规则。
英语语法的精髓在于掌握语言的使用。
而且,英语语法是一套完整的语言知识体系。
如果你想英语能够更进一步,英语语法就是其中的主要一环。
Download tips: English grammar is a series of language rules that are systematically summarized after studying the English language. The essence of English grammar lies in mastering the use of language. Moreover, English grammar is a complete language knowledge system. If you want English to go further, English grammar is the main link.正文内容tool的意思n. 器具,工具,(有助于做工或完成某事的)用具,受人利用的人,压印机vt. 用工具给…加工,压印,驾车到处跑vi. 使用工具,开车,乘车变形:过去式: tooled;现在分词:tooling;过去分词:tooled;tool用法tool可以用作名词tool的基本意思是工具,指能使操作更为方便的工具,尤指用手工操作的工具(如刨、锯等),是可数名词。
tool常用于借喻中,如果指人往往用于贬义,含有轻蔑的意思,是“爪牙,傀儡”的意思; 指事时,可指通过某种“方法,方式”来达到所做事情的目的。
TOOL坐标系和校准方法

TOOL坐标系和校准方法工具坐标系点数据是由直角坐标系为基准的工具(Tool)坐标系中心位置及姿势所表示的。
位置用位置数据(X 、Y 、Z ),姿势用姿势数据(U 、V 、W )指定。
除了机器人固有的T ool 0 坐标系外,用户可自定义1~15 共15个Tool 坐标系。
机器人默认的Tool 0坐标系根据机器人类型分别如下定义。
水平多关节机器人水平多关节机器人((4轴机器人轴机器人))的Tool 0坐标系坐标系的定义的定义第4轴(旋转轴)的中心为原点,把第4轴旋转到0度角度时与机器人直角坐标系平行的坐标轴为坐标轴的坐标系为T ool 0坐标系。
(参考下图)。
Tool 0坐标系是固定在第四关节(旋转关节)的,所以第四关节时Tool 0坐标系也同时旋转。
垂直垂直多关节机器人多关节机器人多关节机器人((6轴机器人轴机器人))的T ool 0坐标系坐标系的定义的定义桌上型时,把所有关节移动到0度位置时第6关节的法兰面中心为原点,垂直上方向为X 轴,机器人直角坐标的X 轴方向为Y 轴,对第6关节法兰面垂直的方向为Z 轴的坐标系为T ool 0坐标系(请参考下图)。
Tool 0坐标系是固定在第6关节的,所以机器人姿势变化时Tool 0坐标系也相应的移动。
吊顶型和挂壁型时的T ool 0坐标系请参考下图。
用户自定义工具用户自定义工具((T ool )坐标系的应用1)视觉定位中的T ool 应用应用。
用视觉定位来补正工件的角度时如果安装在旋转轴(第4轴)上的吸嘴或夹具的中心(Tool 中心)与Tool 0坐标系不一致,通常需要根据角度偏移值和T ool 中心的偏移值经过复杂的三角函数计算才能准确的抓取工件。
这时事先把吸嘴中心或夹具中心校准为自定义T ool 坐标系,就无需任何计算可准确抓取工件。
2)快速搬运工件时多Tool 坐标系的应用用一个吸嘴或夹具搬运工件时有时因机器人速度限制无法达到短循环时间的要求,这时增加几个吸嘴或夹具同时抓取多个工件搬运可减短10%-20%的循环时间,根据情况有时甚至减短30%-40%的循环时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工具坐标系点数据是由直角坐标系为基准的工具(Tool)坐标系中心位置及姿势所表示的。
位置用位置数据(X、Y、Z),姿势用姿势数据(U、V、W)指定。
除了机器人固有的Tool 0 坐标系外,用户可自定义1~15 共15个Tool坐标系。
机器人默认的Tool 0坐标系根据机器人类型分别如下定义。
水平多关节机器人(4轴机器人)的Tool 0坐标系的定义第4轴(旋转轴)的中心为原点,把第4轴旋转到0度角度时与机器人直角坐标系平行的坐标轴为坐标轴的坐标系为Tool 0坐标系。
(参考下图)。
Tool 0坐标系是固定在第四关节(旋转关节)的,所以第四关节时Tool 0坐标系也同时旋转。
垂直多关节机器人(6轴机器人)的Tool 0坐标系的定义桌上型时,把所有关节移动到0度位置时第6关节的法兰面中心为原点,垂直上方向为X轴,机器人直角坐标的X轴方向为Y轴,对第6关节法兰面垂直的方向为Z轴的坐标系为Tool 0坐标系(请参考下图)。
Tool 0坐标系是固定在第6关节的,所以机器人姿势变化时Tool 0坐标系也相应的移动。
吊顶型和挂壁型时的Tool 0坐标系请参考下图。
用户自定义工具(Tool)坐标系的应用1)视觉定位中的Tool应用。
用视觉定位来补正工件的角度时如果安装在旋转轴(第4轴)上的吸嘴或夹具的中心(Tool中心)与Tool 0坐标系不一致,通常需要根据角度偏移值和Tool中心的偏移值经过复杂的三角函数计算才能准确的抓取工件。
这时事先把吸嘴中心或夹具中心校准为自定义Tool坐标系,就无需任何计算可准确抓取工件。
2)快速搬运工件时多Tool坐标系的应用用一个吸嘴或夹具搬运工件时有时因机器人速度限制无法达到短循环时间的要求,这时增加几个吸嘴或夹具同时抓取多个工件搬运可减短10%-20%的循环时间,根据情况有时甚至减短30%-40%的循环时间。
每个吸嘴或夹具校准为独立的Tool坐标系,可简单实现。
3)点胶等经常更换Tool时的应用。
在点胶项目中因胶针容易堵塞经常要更换,一般情况下每次更换胶头或胶桶后需要重新校准点胶的位置,如果使用了自定义Tool的功能,每当更换胶头或胶桶时只需重新校准胶头的Tool即可继续准确的点胶。
Tool的定义方法准确定义机器人夹爪或吸嘴的Tool是非常重要的。
根据Tool的定义机器人通过夹爪或吸嘴取得位置数据,位置数据的全部都与Tool0不相关,只跟夹爪或吸嘴有关。
使用SPEL+语言定义Tool时请使用TLSET指令。
Tool的定义方法有以下几种。
使用机器人管理器的工具向导定义Tool可以使用机器人管理器的工具向导定义Tool。
使用工具向导按照以下步骤操作。
(1) 打开机器人管理器(2) 点击左边列表中的工具(3) 点击工具向导按钮(4) 按照工具向导的提示定义Tool。
Tool的手动计算方法NOTE 使用以下计算Tool的方法时,不能在释放轴的状态下(SFREE状态下)计算,换句话说不能用手推动机器人。
使用步进示教窗口步进移动机器人。
Tool 的计算请按照以下步骤进行。
(1) 请把U轴转动到0º。
(2) 步进示教窗口中的Tool设置为0(TOOL0)。
(3) 步进机器人,请把夹爪或吸嘴对准基准点(对的越准越好,对准的准确度直接影响Tool的校准精度),此时U轴的角度要保持0º。
(4) 现在位置的X坐标和Y坐标记入X1和Y1。
(5) 步进U轴到180º的位置。
(6) 步进机器人,请把夹爪或吸嘴对准基准点(对的越准越好,对准的准确度直接影响Tool的校准精度),此时U轴的角度要保持180º。
(7) 现在位置的X坐标和Y坐标记入X2和Y2。
(8) 使用以下公式计算Tool的偏移量。
xTool = (X2 - X1) / 2yTool = (Y2 - Y1) / 2(9) 在机器人管理器的工具窗口中输入偏移量,或在命令窗口中执行以下指令来定义Tool。
TLSET 1, XY(xTool, yTool, 0, 0)(10) 测试Tool的设置结果。
选择刚才用以上步骤定义的Tool。
举例设置为Tool1 。
然后步进机器人,请把夹爪或吸嘴对准基准点。
之后步进U轴,此时夹爪或吸嘴是对准基准点的情况下旋转不会有偏移。
使用向上的固定相机计算Tool偏移量的方法Function中首先执行定位Tool中心用的序列。
然后进行Tool偏移量的计算。
Function CalcToolBoolean foundReal x, y, u ,x0, y0, u0,xTool, yTool, rTool, thetaTool 0VRun findTipVGet findTip.tip.RobotXYU, found, x, y, uIf found Then' Get the TOOL 0 positionx0 = CX(P*) ; y0 = CY(P*) ; u0 = CU(P*)' Calculate initial tool offsets' X and Y distance from tip found with vision' to center of U axisxTool = x - x0 ; yTool = y - y0' Calculate angle at initial offsetstheta = Atan2(xTool, yTool)' Calculate angle of tool when U is at zero degreestheta = theta - DegToRad(u0)' Calculate tool radiusrTool = Sqr(xTool * xTool + yTool * yTool)' Calculate final tool offsetsxTool = Cos(theta) * rTool ; yTool = Sin(theta) * rTool' Set the toolTLSet 1, XY(xTool, yTool, 0, 0)EndIfFend抓取基板的Tool计算方法在这个例子中Vision Guide 5.0用于机器人抓取需要放置的基板后计算此基板的Tool。
此时需要一个向上的相机一台。
校准相机之后需要示教放置位置。
放置位置的示教方法如下(1) 用机器人抓取基板。
(2) 为了计算Tool1请执行一次子程序CalBoardTool。
(3) 请切换至Tool1。
(4) 请步进移动基板。
(5) 请示教基板放置位置。
F unction CalcBoardTool As BooleanBoolean foundReal fidX, fidY, fidU, rReal robX, robY, robUReal x, y, thetaReal toolX1, toolY1, toolUReal toolX2, toolY2CalcBoardTool = FALSEJump Fid1CamPos ' Locate fiducial 1 over camerarobX = CX(Fid1CamPos)robY = CY(Fid1CamPos)robU = CU(Fid1CamPos)VRun SearchFid1VGet SearchFid1.Corr01.RobotXYU, found, fidX, fidY, fidUIf found Thenx = fidX - robXy = fidY - robYtheta = Atan2(x, y) - DegToRad(robU)r = Sqr(x ** 2 + y ** 2)toolX1 = Cos(theta) * rtoolY1 = Sin(theta) * rElse 'target not foundExit FunctionEndIfJump Fid2CamPos ' Locate fiducial 2 over camerarobX = CX(Fid2CamPos)robY = CY(Fid2CamPos)robU = CU(Fid2CamPos)VRun SearchFid2VGet SearchFid2.Corr01.RobotXYU, found, fidX, fidY, fidUIf found Thenx = fidX - robXy = fidY - robYtheta = Atan2(x, y) - DegToRad(robU)r = Sqr(x ** 2 + y ** 2)toolX2 = Cos(theta) * rtoolY2 = Sin(theta) * rElse 'target not foundExit FunctionEndIfx = (toolX1 + toolX2) / 2y = (toolY1 + toolY2) / 2theta = Atan2(toolX1 - toolX2, toolY1 - toolY2) toolU = RadToDeg(theta)TlSet XY(1, x, y, 0, toolU)CalcBoardTool = TRUEFend。