机械原理第九章习题答案
《机械原理》(于靖军版)第9章习题答案

9-2 在飞机起落架所用的铰链四杆机构中,已知连杆的两位置如题图9-1所示,要求连架杆AB的铰链A 位于B1C1的连线上,连架杆CD的铰链D位于B2C2的连线上。
试设计此四杆机构。
题图9-1解:9-3 用图解法设计一曲柄摇杆机构。
已知两固定铰链点A、D,摇杆位于左极限位置时,对应的连杆位置为M1N1,且M1N1与AD之间的夹角为65︒,过点D的铅垂线为摇杆左右极限位置的对称轴,且摇杆的摆角恰等于极位夹角θ的2倍,并求其行程速比系数K。
(注:M1、N1为连杆AB线上的任意两点,请直接在题图9-2上作图)题图9-2解:B1BC C1θθ2DA由几何关系可知:A点位于以D为圆心,CD杆长为半径的圆上。
因为:AD=DC1可知:︒︒︒=⨯-=∠506521801DA C︒︒︒=-=405090θ所以:571711-180180.==+=︒︒θθK 9-4 试设计一铰链四杆机构。
已知行程速度变化系数K =1,机架长l AD =100mm ,曲柄长l AB =20mm ,且当曲柄与连杆共线,摇杆处于右极限位置时,曲柄与机架的夹角为30︒(题图9-3)。
试用图解法确定摇杆及连杆的长度。
题图9-3解:A B ’B CC ’D O30°如图所示: mm 25l l =='AB AB mm 25l l =='OC OC 50mm l =ODmm 2910l l l 2OD2DC'=+='DC mm 35030l l =⋅=︒cos AD BC9-5 如题图9-4所示,已给出铰链四杆机构的连杆(铰链C 在连杆参考线I 和II 上)和连架杆AB 的两组对应位置,以及固定铰链D 的位置,已知l AB =25mm 。
试:(1) 用图解法设计此铰链四杆机构,并给出连杆BC 的长度和连架杆CD 的长度; (2) 判断连架杆AB 是否可整周转动,并给出理由;(3) 当连架杆AB 为原动件时,在图上标出机构位于AB 1C 1D 位置的传动角。
机械原理课后答案
习题解答第一章绪论1-1 答:1 )机构是实现传递机械运动和动力的构件组合体。
如齿轮机构、连杆机构、凸轮机构、螺旋机构等。
2 )机器是在组成它的实物间进行确定的相对运动时,完成能量转换或做功的多件实物的组合体。
如电动机、内燃机、起重机、汽车等。
3 )机械是机器和机构的总称。
4 )a. 同一台机器可由一个或多个机构组成。
b. 同一个机构可以派生出多种性能、用途、外型完全不同的机器。
c. 机构可以独立存在并加以应用。
1-2 答:机构和机器,二者都是人为的实物组合体,各实物之间都具有确定的相对运动。
但后者可以实现能量的转换而前者不具备此作用。
1-3 答:1 )机构的分析:包括结构分析、运动分析、动力学分析。
2 )机构的综合:包括常用机构设计、传动系统设计。
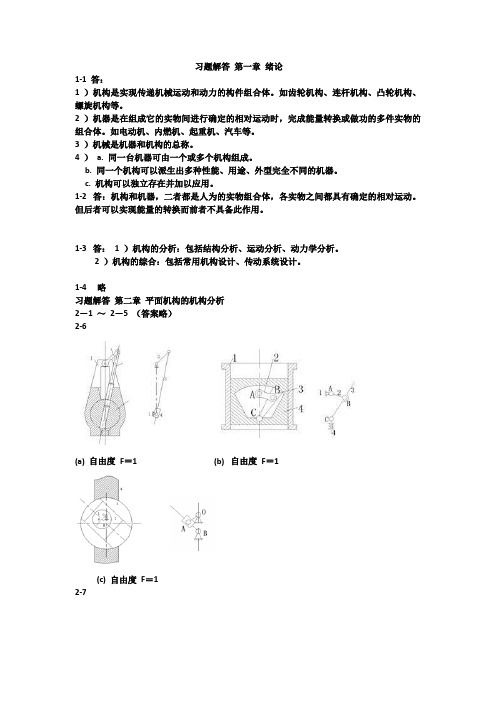
1-4 略习题解答第二章平面机构的机构分析2-1 ~2-5 (答案略)2-6(a) 自由度F=1 (b) 自由度F=1(c) 自由度F=12-7题2 -7 图F =3 × 7 -2 × 9 -2 =12 -8a) n =7 =10 =0 F =3×7-2×10 =1b) B 局部自由度n =3 =3 =2 F=3×3 -2×3-2=1c) B 、D 局部自由度n =3 =3 =2 F=3×3 -2×3-2 =1d) D( 或C) 处为虚约束n =3 =4 F=3×3 -2×4=1e) n =5 =7 F=3×5-2×7=1f) A 、B 、C 、E 复合铰链n =7 =10 F =3×7-2×10 =1g) A 处为复合铰链n =10 =14 F =3×10 -2×14=2h) B 局部自由度n =8 =11 =1 F =3×8-2×11-1 =1i) B 、J 虚约束C 处局部自由度n =6 =8 =1 F =3×6 -2×8-1=1j) BB' 处虚约束A 、C 、D 复合铰链n =7 =10 F =3×7-2×10=1 k) C 、D 处复合铰链n=5 =6 =2F =3×5-2×6-2 =1l) n =8 =11 F =3×8-2×11 =2m) B 局部自由度I 虚约束4 杆和DG 虚约束n =6 =8 =1 F =3×6-2×8-1 =12-9a) n =3 =4 =1 F =3 × 3 -2 × 8 -1 =0 不能动。
机械设计基础习题答案第9章
机械设计基础习题答案第9章第一篇:机械设计基础习题答案第9章9-1 仔细观察自行车,写出下列各处采用什么联接,(1)车架各部分;(2)脚踏轴与曲拐;(3)曲拐与链轮;(4)曲拐与中轴;(5)车轮轴与车架。
答:(1)焊接;(2)螺纹联接;(3)成形联接;(4)成形联接或销联接;(5)螺纹联接 9-2 螺栓联接、螺柱联接、螺钉联接、紧定螺钉联接四种联接的结构特点有什么不同?各用于什么场合?答:1.螺栓联接普通螺栓联接的通孔为过孔,加工精度低,被联接件不切制螺纹,用于能从被联接件两边进行装配的场合,使用不受被联接件材料的限制,构造简单,装拆方便,成本低,应用最广。
铰制孔螺栓联接,螺栓杆与孔之间紧密配合,有良好的承受横向载荷的能力和定位作用。
2.双头螺柱联接双头螺柱的两端都有螺纹,其一端紧固地旋入被联接件之一的螺纹孔内,另一端与螺母旋合而将两被联接件联接。
用于被联接件之一太厚不便穿孔或受结构限制而不能用螺栓联接且需经常装拆的场合。
3.螺钉联接不用螺母,直接将螺钉拧入被联接件之一的螺纹孔内,应用与双头螺栓联接相似,但不能用在经常装拆或受力太大的场合。
4.紧定螺钉联接将紧定螺钉旋入一零件的螺纹孔中,并以其末端顶住另一零件的表面或嵌入相应的凹坑中,以固定两个零件的相对位置,并传递不大的力或扭矩。
9-3 在实际应用中,绝大多数螺纹联接都要预紧,预紧的目的是什么?答:预紧的目的是增加联接刚度、紧密性和提高防松能力。
9-4 某圆柱形压力容器的端盖采用8个M20的普通螺栓联接。
已知工作压力p=3 MPa,螺栓位于D0 = 280mm的圆周上,试问该联接的紧密性是否满足要求?解:计算螺栓间距t=πD0Z=π⨯2808=109.9mm 查表9-7,p=3 MPa,t0<4.5d=4.5×20=90mm,因此,不能慢紧密性的要求。
9-5 某气缸的蒸汽压强p=1.5MPa,气缸内径D=200mm。
气缸与气缸盖采用普通螺栓联接,螺栓分布在直径D0 =300mm的圆周上。
《机械原理》习题答案-CH09
力作用点的速度方向: 沿移动副导路方向。
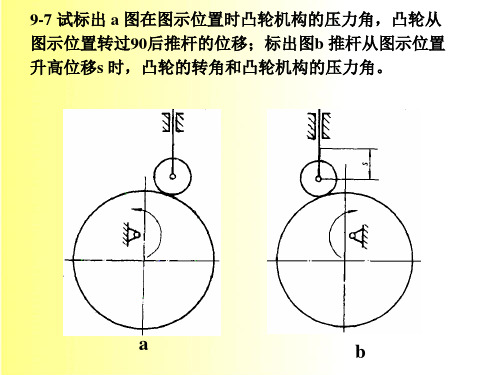
1) 凸轮从图示位置转过90º 后推杆的位移; 图示位置推杆的位移量S0应 是沿推杆的导路方向(与偏距圆 相切)从基圆开始向外量取。 凸轮从图示位置转过90º 后 推杆的位移等于推杆从图示位 置反转90º 后的位移。 推杆从图示位置反转90º 后 的导路方向仍于与偏距圆相切。 其位移量S1 仍是沿推杆的导路 方向从基圆开始向外量取。 凸轮从图示位置转过90º 后推杆的位移:S=S1 -S0
2)远休2 2 dx / d ( s 0 s ) cos( 2) e sin( 2) 3 3 2 2 dy / d ( s 0 s ) sin( 2) e cos( 2) 3 3
3 [0, / 3] 5 5 5 dx / d (ds / d )sin( 3) ( s 0 s) cos( 3) e sin( 3) 6 6 6 3h 5 5 5 sin(3 3)sin( 3) ( s 0 s)( 3) e sin( 3) 2 6 6 6 5 5 5 dy / d (ds / d )sin( 3) ( s 0 s)sin( 3) e cos( 3) 6 6 6 3h 5 5 5 sin(3 3) cos( 3) ( s 0 s)sin( 3) e cos( 3) 2 6 6 6 4)近休阶段 4 [0,5 / 6] 7 7 dx / d ( s 0 s ) cos( 4) e sin( 4) 6 6 7 7 dy / d ( s 0 s ) sin( 4) e cos( 4) 6 6
1)推程阶段
1 [0, 2 / 3] dx / d (ds / d ) sin 1 ( s 0 s) cos 1 e sin 1 3h { [1 cos(3 1)]}sin 1 ( s 0 s) cos 1 e sin 1 2 dy / d (ds / d ) cos 1 ( s 0 s )( sin 1) e cos 1 3h { [1 cos(3 1)]}cos 1 ( s 0 s ) sin 1 e cos 1 2
(完整版)机械原理课后全部习题答案

机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理课后答案第9章
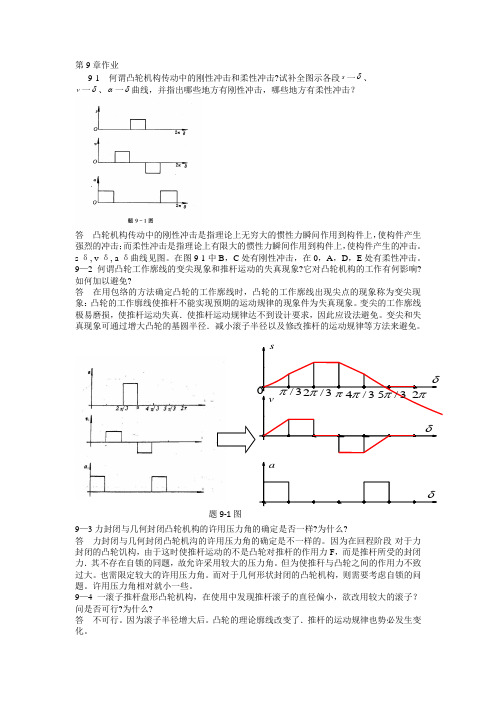
第9章作业9-1 何谓凸轮机构传动中的刚性冲击和柔性冲击?试补全图示各段s一δ、v一δ、α一δ曲线,并指出哪些地方有刚性冲击,哪些地方有柔性冲击?答凸轮机构传动中的刚性冲击是指理论上无穷大的惯性力瞬问作用到构件上,使构件产生强烈的冲击;而柔性冲击是指理论上有限大的惯性力瞬间作用到构件上,使构件产生的冲击。
s-δ, v-δ, a-δ曲线见图。
在图9-1中B,C处有刚性冲击,在0,A,D,E处有柔性冲击。
9—2何谓凸轮工作廓线的变尖现象和推杆运动的失真现象?它对凸轮机构的工作有何影响?如何加以避免?答在用包络的方法确定凸轮的工作廓线时,凸轮的工作廓线出现尖点的现象称为变尖现象:凸轮的工作廓线使推杆不能实现预期的运动规律的现象件为失真现象。
变尖的工作廓线极易磨损,使推杆运动失真.使推杆运动规律达不到设计要求,因此应设法避免。
变尖和失真现象可通过增大凸轮的基圆半径.减小滚子半径以及修改推杆的运动规律等方法来避免。
9—3力封闭与几何封闭凸轮机构的许用压力角的确定是否一样?为什么?答力封闭与几何封闭凸轮机沟的许用压力角的确定是不一样的。
因为在回程阶段-对于力封闭的凸轮饥构,由于这时使推杆运动的不是凸轮对推杆的作用力F,而是推杆所受的封闭力.其不存在自锁的同题,故允许采用较大的压力角。
但为使推秆与凸轮之间的作用力不致过大。
也需限定较大的许用压力角。
而对于几何形状封闭的凸轮机构,则需要考虑自锁的问题。
许用压力角相对就小一些。
9—4一滚子推杆盘形凸轮机构,在使用中发现推杆滚子的直径偏小,欲改用较大的滚子?问是否可行?为什么?答不可行。
因为滚子半径增大后。
凸轮的理论廓线改变了.推杆的运动规律也势必发生变化。
题9-1图9—5一对心直动推杆盘形凸轮机构,在使用中发现推程压力角稍偏大,拟采用推杆偏置的办法来改善,问是否可行?为什么?答 不可行。
因为推杆偏置的大小、方向的改变会直接影响推杆的运动规律.而原凸轮机构推杆的运动规律应该是不允许擅自改动的。
机械原理第9章 螺旋机构、万向联轴器、间歇运动机构
1.棘轮机构的类型及其应用
(1)齿式棘轮机构 齿式棘轮的轮齿一般采用三角形齿、梯形齿 或矩形齿,分为外齿棘轮和内齿棘轮。图9-6a为外齿棘轮机构, 图9-6b为棘条机构,图9-6c为内齿棘轮机构。根据驱动爪的数 目,棘轮机构还可分为单动式棘轮机构和双动式棘轮机构。
Fig.9-6 Tooth ratchet mechanisms(齿式棘轮机构)
Fig.9-12 Geneva wheel mechanisms 1(槽轮机构1)
1.槽轮机构的类型
空间槽轮机构用来传递相交轴的间歇运动。图9-13a为垂直 相交轴间的球面槽轮机构,槽轮呈半球形,主动销轮1、球面槽 轮3以及圆销2的轴线都通过球心,当主动销轮1连续转动时,球 面槽轮3作单向间歇转动。图9-13b为移动型槽轮机构,可实现 圆弧齿条的间歇移动。
Fig.9-4 Double universal joints(双万向联 轴器)
9.3 棘轮机构
图9-5所示的棘轮机构由主动摇杆1、 棘爪2、棘轮3、止回棘爪4和机架等部 分组成。弹簧5用来使止回棘爪4和棘 轮3保持接触。主动摇杆1空套在与棘 轮3固连的从动轴O上,并与棘爪2用 转动副相连。当主动摇杆作逆时针方 向摆动时,棘爪2便插入棘轮3的齿槽 内,推动棘轮转动一定的角度,此时 止回棘爪4在棘轮的齿背上滑过。当主 动摇杆顺时针摆动时,止回棘爪阻止 棘轮顺时针方向转动,棘爪2在棘轮的 齿背上滑过,棘轮3保持静止不动。这 Fig.9-5 Ratchet mechanism(棘轮机构) 1—driving rocker(主动摇杆) 样,当主动件作连续的往复摆动时, 2—driving pawl(棘爪)3—ratchet(棘轮) 棘轮作单向的间歇转动。 4—holding pawl(止回棘爪)5—spring(弹簧)
机械原理课后习题答案部分

第二章2-1 何谓构件何谓运动副及运动副元素运动副是如何进行分类的答:参考教材5~7页;2-2 机构运动简图有何用处它能表示出原机构哪些方面的特征答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析;2-3 机构具有确定运动的条件是什么当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况答:参考教材12~13页;2-5 在计算平面机构的自由度时,应注意哪些事项答:参考教材15~17页;2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗为什么答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处;2-7 何谓机构的组成原理何谓基本杆组它具有什么特性如何确定基本杆组的级别及机构的级别答:参考教材18~19页;2-8 为何要对平面高副机构进行“高副低代"“高副低代”应满足的条件是什么答:参考教材20~21页;2-11 如图所示为一简易冲床的初拟设计方案;设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的;试绘出其机构运动简图,分析其是否能实现设计意图并提出修改方案;解:1取比例尺绘制机构运动简图;2分析其是否可实现设计意图;F=3n- 2P l +P h –p’ -F’=3×3-2×4+1-0-0=0此简易冲床不能运动,无法实现设计意图;3修改方案;为了使此机构运动,应增加一个自由度;办法是:增加一个活动构件,一个低副;修改方案很多,现提供两种;※2-13图示为一新型偏心轮滑阎式真空泵;其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动;当偏心轮按图示方向连续回转时可将设备中的空气吸入,并将空气从阀5中排出,从而形成真空;1试绘制其机构运动简图;2计算其自由度;解:1取比例尺作机构运动简图如图所示;2 F=3n-2p1+p h-p’-F’=3×4-2×4+0-0-1=12-14 解:1绘制机构运动简图1)绘制机构运动简图F=3n-2P l +P h –p’-F’=3×5-2×7+0-0-0=12)弯曲90o 时的机构运动简图※2-15试绘制所示仿人手型机械手的食指机构的机构运动简图以手掌8作为相对固定的机架,井计算自由度;解:1取比倒尺肌作机构运动简图;2计算自由度1⨯=-F210⨯73=2-17 计算如图所示各机构的自由度;aF=3n- 2P l +P h–p’-F’=3×4-2×5+1 -0-0=1A处为复合铰链bF=3n-2P l +P h–p’-F’=3×7-2×8+2-0-2=12、4处存在局部自由度cp’= 2P l ’+P h ’-3n’=2×10+0-3×6=2,F=3n-2P l +P h–p’-F’=3×11-2×17+0-2-0=1C、F、K 处存在复合铰链,重复部分引入虚约束※2-21图示为一收放式折叠支架机构;该支架中的件1和5分别用木螺钉连接于固定台板1’和括动台板5’上.两者在D处铰接,使活动台板能相对于固定台极转动;又通过件1,2,3,4组成的铰链四杆机构及连杆3上E点处的销子与件5上的连杆曲线槽组成的销槽连接使活动台板实现收放动作;在图示位置时,虽在活动台板上放有较重的重物.活动台板也不会自动收起,必须沿箭头方向推动件2,使铰链B,D重合时.活动台板才可收起如图中双点划线所示;现已知机构尺寸l AB=l AD=90 mm;l BC=l CD=25 mm,其余尺寸见图;试绘制该机构的运动简图,并计算其自由度;解:F=3n-2p1+p b-p’-F’=3×5-2×6+1-0-1=12-23 图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组;有如在该机构中改选EG为原动件,试问组成此机构的基本杆组是否与前有所不同;解:1计算自由度F=3n-2P l +P h–p’-F’=3×7-2×10+0-0-0=12拆组3EG 为原动件,拆组2-24 试计算如图所示平面高副机构的自由度,并在高副低代后分析组成该机构的基本杆组;1、解:1计算自由度F=3n-2P l +P h –p ’-F ’=3×5-2×6+1-0-1=12从结构上去除局部自由度、虚约束、多余的移动副、转动副如图2所示 3高副低代如图3所示 4拆组如图4所示 2、解:1计算自由度F=3n-2P l +P h –p ’-F ’=3×-2×9+1-0-1=12从结构上去除局部自由度、虚约束、多余的移动副、转动副如图b 所示 3高副低代如图c 所示 4拆组如图d 所示第三章3—1 何谓速度瞬心相对瞬心与绝对瞬心有何异同点 答:参考教材30~31页;3—2 何谓三心定理何种情况下的瞬心需用三心定理来确定 答:参考教材31页;※3-3机构中,设已知构件的尺寸及点B 的速度v B 即速度矢量pb,试作出各机构在图示位置时的速度多边形;※3-4 试判断在图示的两机构中.B 点足否都存在哥氏加速度又在何位置哥氏加速度为零怍出相应的III 级组II 级组II 级组II 级组机构位置图;并思考下列问题;1什么条件下存在氏加速度2根椐上一条.请检查一下所有哥氏加速度为零的位置是否已全部找出;3图 a 中,a kB2B3=2ω2v B2B3对吗为什么;解:1图 a 存在哥氏加速度,图 b 不存在;2由于a kB2B3==2ω2v B2B3故ω3,v B2B3中只要有一项为零,则哥氏加速度为零;图 a 中B 点到达最高和最低点时构件1,3.4重合,此时v B2B3=0,当构件1与构件3相互垂直.即_f=;点到达最左及最右位置时ω2=ω3=0.故在此四个位置无哥氏加速度;图 b 中无论在什么位置都有ω2=ω3=0,故该机构在任何位置哥矢加速度都为零; 3对;因为ω3≡ω2;3-5 在图示的曲柄滑块机构中,已知mm l mm l mm l mm l DE BD A AB 40,50,100,30C ====,曲柄以等角速度s rad /101=ω回转,试用图解法求机构在︒=451ϕ位置时,点D 、E 的速度和加速度以及构件2的角速度和角加速度;解:1以选定的比例尺l μ作机构运动简图(2)速度分析AB)(m/s 3.01⊥==AB B l v ωBCBCv v v v v C C C B C B C //32322⊥∨∨+=+=?方向:?0?大小:?根据速度影像原理,作BC BD bc bd //2=求得点d,连接pd;根据速度影像原理,作BDE bde ∆≈∆求得点e,连接pe,由图可知)(/r 2/m/s,175.0m/s,173.0,m/s 23.0223232顺时针s ad l bc c c v pe v pd v BC v v C C v E v D ========μωμμμ (3)加速度分析A)(B m/s 3221→==AB B l a ω根据速度影像原理作BC BD c b d b /''/''2=求得点'd ,连接''d p ;根据速度影像原理,作BDE e d b ∆≈'''∆求得点e ',连接e p '',由图可知)(/36.8//,m/s 8.2'',m/s 64.2''2'2'22222顺时针s rad l c n l a e p a d p a BC a BC B C a E a D =======μαμμτ 3-6 在图示机构中,设已知各构件的尺寸,原动件1以等角速度1ω顺时针方向转动,试用图解法求机构在图示位置时构件3上C 点速度和加速度比例尺任选;abc3-7 在图示机构中,已知mm l mm l mm l mm l mm l BC CD EF A AE 50,75,35,40,70B =====,曲柄以等角速度s rad /101=ω回转,试用图解法求机构在︒=501ϕ位置时,C 点的速度c v 和加速度c a ; 解:1以选定的比例尺l μ作机构运动简图;速度分析m/s 72.0m/s,4.01111====AF F AB B l v l v ωω AFAF EFv v v v F F F F F //15145⊥⊥∨+==方向:大小:v d 用速度影响法求2速度分析CD ED v v v CDD C ⊥⊥∨+=方向:大小: BC AB v v v CBB C ⊥⊥∨+=方向:大小:3加速度分析)(m/s 2.7A),(B m/s 42211221A F l a l a AF F AB B →==→==ωω AFA F v a a a a a F F rF F k F F F F F ///21511515145→→∨++==方向:大小:ω EFEF l a a a a a EFEF n E F E F F ⊥→++==方向:大小:2444450ωτa d 用加速度影像法求CD D C l a a a a CDCDnCD D C ⊥→∨∨++=方向:大小:23ωτ CBB C l a a a a CB CBnCB B C ⊥→∨∨++=方向:大小:22ωτ 2m/s 3''=⋅=a C c p a μ3-8 在图示凸轮机构中,已知凸轮1以等角速度s rad /101=ω转动,凸轮为一偏心圆,其半径︒====90,50,15,251B ϕmm l mm l mm R AD A ;试用图解法求构件2的角速度2ω和角加速度2α; 解:1以选定的比例尺l μ作机构运动简图;2速度分析:将机构进行高副低代,其替代机构如图b 所示;m/s 15.0141===AB B B l v v ωCDAB BD v v v B B B B //4242⊥⊥∨+=方向:大小:??)(/3.2//222逆时针s rad l pb l v BD v BD B ===μω3加速度分析A)m/s(B 5.12141→===AB B B l a a ω其中,)(顺时针222222222242242rad/s 9.143/''/,m/s 286.0,m/s 746.02=======BD a BD D B BD n D B B B k B B l b n l a l a v a μαωωτ 3-11 试求图示机构在图示位置时的全部瞬心; 解:a 总瞬心数:4×3/2=6对P 13:P 12、P 23、P 13在同一直线上, P 14、P 34、P 13在同一直线上 对P 24:P 23、P 34、P 24在同一直线上,P 12、P 14、P 24在同一直线上 d 总瞬心数:4×3/2=6对P 13:P 12、P 23、P 13在同一直线上, P 14、P 34、P 13在同一直线上 对P 24:P 23、P 34、P 24在同一直线上,P 12、P 14、P 24在同一直线上※3-12 标出图示的齿轮一连杆组合机构中所有瞬心,并用瞬心法求齿轮1与齿轮3的传动比ω1/ω3; 解:1瞬新的数目:K=NN-1/2=66-1/2=152)为求ω1/ω3需求3个瞬心P 16、P 36、P 13的位置,3)ω1/ω3= P 36P 13/P 16P 13=DK/AK,由构件1、3在K 点的速度方向相同,可知ω3与ω1同向;3-13 在图示四杆机构中,s rad mm l mm l CD AB /10,90,602===ω,试用瞬心法求:1当︒=165ϕ时点C 的速度C v ;当︒=165ϕ时构件3的BC 线上或其延长线上速度最小的一点E 的位置及其速度大小;3当0=C v 时ϕ角之值有两解;解:1以选定的比例尺l μ作机构运动简图(2)因P 24为构件2、4的顺心,则m/s 4.0rad/s 5.4424242242424=⋅==⋅=⋅=CD C D P A P l v DP AP l l ωωωω,对P 24:P 23、P 34、P 24在同一直线上,P 12、P 14、P 24在同一直线上(3)因构件3的BC 线上速度最小的点到绝对瞬心P 13的距离最近,故从P 13作BC 线的垂线交于E 点; 对P 13:P 12、P 23、P 13在同一直线上, P 14、P 34、P 13在同一直线上,故m/s 357.0131321313133313=⋅⋅=⋅⋅⋅=⋅⋅=⋅=E P B P l E P u B P v E P l v ABl l B l E P E ωμμωω(4)若0=C v ,则04=ω,DP AP l l DP A P 24242242424⋅=⋅=ωωω若024=A P ,则P 24与P 12重合,对P 24:P 23、P 34、P 24在同一直线上,P 12、P 14、P 24在同一直线上 若024=A P ,则A 、B 、C 三点共线;︒=⋅-++︒=︒=⋅-+=6.226)2arccos(1804.26)2arccos(22222221212211ADAC D C AD AC AD AC D C AD AC ϕϕ, ※3-15 在图示的牛头刨机构中,l AB =200 mnl,l CD =960 mm,l DE =160 mm, h=800mm,h 1=360mm,h 2=120mm;设曲柄以等角速度ω1=5 rad /s .逆时针方向回转.试以图解法求机构在φ1=135o 位置时.刨头点的速度v C ;sm AP v v P P P l p c l /24.1,,)2(151********===μωμ出瞬心利用顺心多边形依次定所示作机构运动简图,如图(1)以:解。