角变位行星齿轮几何尺寸的计算
变位齿轮参数及计算
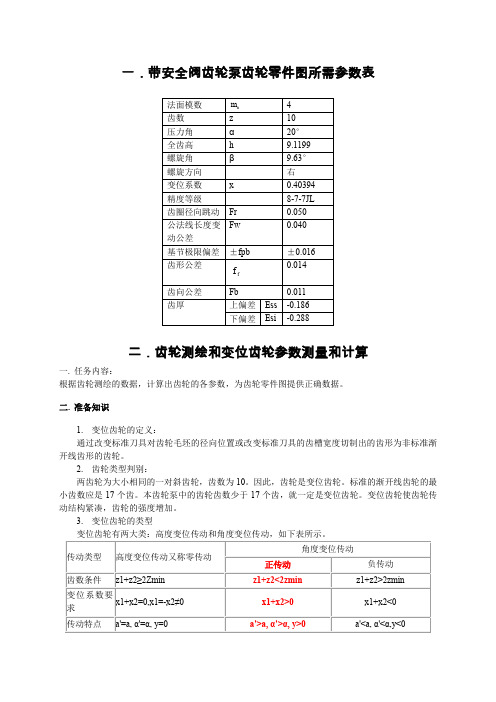
x 0.40394
3.计算其他参数的公式 端面模数 mt mn / cos 啮合角 cos '
a cos a'
总变位系数: xt
z1 z2 (invt' invt ) 2 tan t
12t2tantttzzxinvinv???????分度圆直径d齿顶圆直径mz?2aaddh??齿根圆直径2ffddh??基圆直径cosbtdd??齿顶高ananntthmhxym????齿根高nfnannhmhcx???标准中心距1212add??中心距变动系数ttaaym??齿顶高变动系数tttyxy????固定弦齿厚2cos2tan2cnnnnnsmx?????五计算软件界面
* a
② 然后按全齿高计算模数:
m
③从而从标准模数系列中选择 m 4 ,进行下面的试算,然后校核。
2.验算压力角和计算变位系数 依据公法线长度公式可选择压力角,然后计算变位系数。 ① 通过基圆齿距 Pb Wk1 Wk m cos 公式计算模数 m。 ② 将公法线值和压力角值 20°和 15°分别代入上式验算模数 m, 其中压力角为 20°时算得结果接 近模数 4,故取 n 20 。 ③ 求变位系数
ห้องสมุดไป่ตู้
主要缺点
由于我们的齿轮副的两个齿轮的齿数之和小于 17 齿的两倍,所以这对齿轮是采用角度变位中的 正变位加工而成的。 三. 齿轮参数测量结果: 齿数 z : 10 齿顶圆直径 Da : 49.94 齿根圆直径 D f
31.81
端面公法线长度 Wk 18.876mm 端面公法线长度 Wk 1 30.055mm 斜齿螺旋角 9.63° 啮合中心距离 a 42mm 其他已知参数: 压力角 n 20°or15° 齿顶高系数 径向间隙系数
行星齿轮计算iso9085

-0.247 1.104 13.617 1.489 18.369 12.907
1.995 0.034 0.046
系数Bk 动载系数KV
Bk=|1c'*Ca/((Ft*Ka)/ b)| KV=N(Cv1*B p+Cv2*Bf+Cv 3*Bk)+1
单位载荷Fm/b(小于100时 Fm/b=Ft*KA*
mt=mn/cosβ sinβb=sinβ*cos αn gα =1/2*((da1^2db1^2)^0.5+(d a2^2db2^2)^0.5)a*sinαwt pbt=mt*π*cosα t
0.183 13.1740134
15
9
7.174013395
22.174
22.174 196.3480268
d1=Mn*Z1/CO SΒ
0 0.34906585
170
d2=Mn*Z2/CO
分度圆直径d2
SΒ
180
2 未变位时中心距Ad 3 中心距变动系数Yn 4 啮合角awt
Ad=Mn*(Z1+Z 2)/2COSΒ Yn=(AAd)/Mn tgat=tgan/COS β
at=arctgat COSα wt=Ad/A*COS at
临界转速比N(共振区 0.2~0.5) 总重合的εγ
N=n1/nE1 εγ=εα+εβ
系数Cv1/Cv2/Cv3
齿廓偏差跑合量yp1/yp2 有效基节偏差fpbeH 齿距偏差跑合量yf
0.32 yp=ya=0.075*f pb fpbeH=fpb-yp yf=0.075*fta
有效齿廓形状偏差ffeH ffeH=fta-yf
变位齿轮几何参数计算
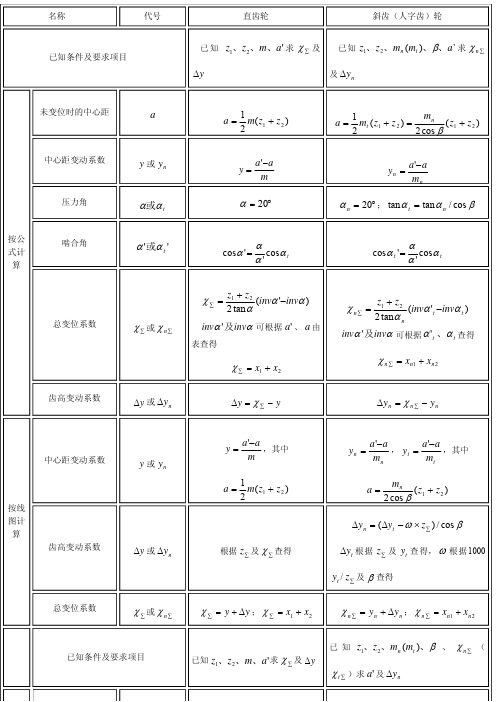
(invα '−invα )
invα '及invα 可根据 a' 、 a 由
表查得
χ ∑ = x1 + x2
χn∑
=
z1 + z2 2 tanα n
(invα 't −invαt )
invα '及invα 可根据 α 't 、α t 查得
χ n ∑ = xn1 + xn2
Δy 或 Δyn
Δy = χ ∑ − y
Δyn = χ n ∑ − yn
按线 图计
算
齿高变动系数 中心距变动系数
Δy 或 Δyn y 或 yn
根据 z∑ 及 χ ∑ 查得 y = χ ∑ − Δy
中心距
α'
α ' = a + ym
注:1.表内公式中的x、xn(xt)本身应带正负号代入;Δy、Δyt永为正号。 2.计算高度变位圆柱齿轮几何尺寸时,公式中的y或yt,Δy或Δyt均为零。
y 或 yn α或α t
y = a'−a m
α = 20°
yn
=
a'−a mn
α n = 20° ; tanα t = tanα n / cos β
按公 式计
算
பைடு நூலகம்
啮合角
α '或α t '
cosα
'
=
α α'
cosα
t
cosα
t
'
=
α α'
cosα
t
总变位系数 齿高变动系数
χ∑或 χn∑
χ∑
=
z1 + z2 2 tanα
变位齿轮参数计算公式
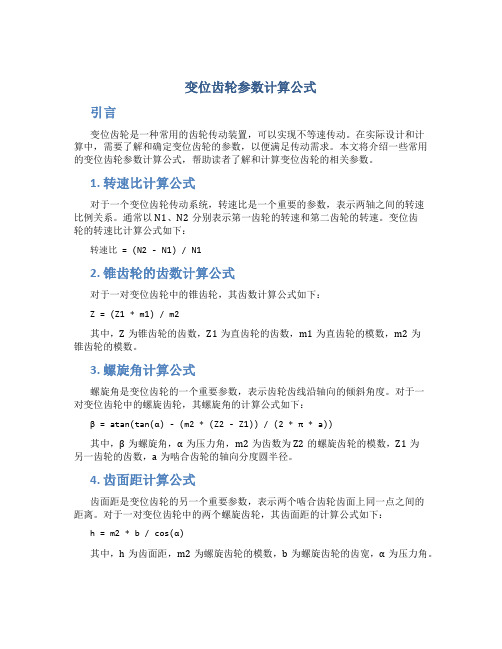
变位齿轮参数计算公式引言变位齿轮是一种常用的齿轮传动装置,可以实现不等速传动。
在实际设计和计算中,需要了解和确定变位齿轮的参数,以便满足传动需求。
本文将介绍一些常用的变位齿轮参数计算公式,帮助读者了解和计算变位齿轮的相关参数。
1. 转速比计算公式对于一个变位齿轮传动系统,转速比是一个重要的参数,表示两轴之间的转速比例关系。
通常以N1、N2分别表示第一齿轮的转速和第二齿轮的转速。
变位齿轮的转速比计算公式如下:转速比 = (N2 - N1) / N12. 锥齿轮的齿数计算公式对于一对变位齿轮中的锥齿轮,其齿数计算公式如下:Z = (Z1 * m1) / m2其中,Z为锥齿轮的齿数,Z1为直齿轮的齿数,m1为直齿轮的模数,m2为锥齿轮的模数。
3. 螺旋角计算公式螺旋角是变位齿轮的一个重要参数,表示齿轮齿线沿轴向的倾斜角度。
对于一对变位齿轮中的螺旋齿轮,其螺旋角的计算公式如下:β = atan(tan(α) - (m2 * (Z2 - Z1)) / (2 * π * a))其中,β为螺旋角,α为压力角,m2为齿数为Z2的螺旋齿轮的模数,Z1为另一齿轮的齿数,a为啮合齿轮的轴向分度圆半径。
4. 齿面距计算公式齿面距是变位齿轮的另一个重要参数,表示两个啮合齿轮齿面上同一点之间的距离。
对于一对变位齿轮中的两个螺旋齿轮,其齿面距的计算公式如下:h = m2 * b / cos(α)其中,h为齿面距,m2为螺旋齿轮的模数,b为螺旋齿轮的齿宽,α为压力角。
5. 压力角计算公式压力角是变位齿轮设计中的一个重要参数,表示齿形曲线的锋角与轴线的夹角。
通常使用以下计算公式得到压力角的值:cos(α) = (Z1 + Z2) / (2 * m2 * a)其中,α为压力角,Z1和Z2分别为两个啮合齿轮的齿数,m2为螺旋齿轮的模数,a为啮合齿轮的轴向分度圆半径。
结论本文介绍了几个重要的变位齿轮参数计算公式,包括转速比、锥齿轮的齿数、螺旋角、齿面距和压力角的计算公式。
齿轮的计算公式表
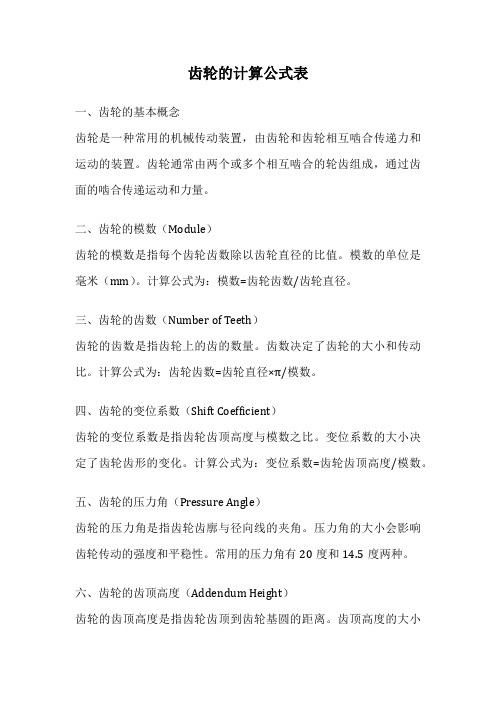
齿轮的计算公式表一、齿轮的基本概念齿轮是一种常用的机械传动装置,由齿轮和齿轮相互啮合传递力和运动的装置。
齿轮通常由两个或多个相互啮合的轮齿组成,通过齿面的啮合传递运动和力量。
二、齿轮的模数(Module)齿轮的模数是指每个齿轮齿数除以齿轮直径的比值。
模数的单位是毫米(mm)。
计算公式为:模数=齿轮齿数/齿轮直径。
三、齿轮的齿数(Number of Teeth)齿轮的齿数是指齿轮上的齿的数量。
齿数决定了齿轮的大小和传动比。
计算公式为:齿轮齿数=齿轮直径×π/模数。
四、齿轮的变位系数(Shift Coefficient)齿轮的变位系数是指齿轮齿顶高度与模数之比。
变位系数的大小决定了齿轮齿形的变化。
计算公式为:变位系数=齿轮齿顶高度/模数。
五、齿轮的压力角(Pressure Angle)齿轮的压力角是指齿轮齿廓与径向线的夹角。
压力角的大小会影响齿轮传动的强度和平稳性。
常用的压力角有20度和14.5度两种。
六、齿轮的齿顶高度(Addendum Height)齿轮的齿顶高度是指齿轮齿顶到齿轮基圆的距离。
齿顶高度的大小决定了齿轮齿形的形状和强度。
计算公式为:齿顶高度=模数+齿轮齿顶圆角半径。
七、齿轮的齿根高度(Dedendum Height)齿轮的齿根高度是指齿轮齿根到齿轮基圆的距离。
齿根高度的大小决定了齿轮齿形的形状和强度。
计算公式为:齿根高度=1.25×模数。
八、齿轮的齿宽(Face Width)齿轮的齿宽是指齿轮齿的宽度。
齿宽的大小决定了齿轮的强度和传动能力。
计算公式为:齿宽=传动功率/齿轮转速。
九、齿轮的齿廓曲线齿轮的齿廓曲线是指齿轮齿的截面曲线。
常见的齿廓曲线有圆弧齿廓、渐开线齿廓和直线齿廓。
不同的齿廓曲线适用于不同的传动方式和工作条件。
十、齿轮的传动比(Gear Ratio)齿轮的传动比是指驱动齿轮的转速与被驱动齿轮的转速之比。
传动比决定了齿轮传动的速度和力量变化。
计算公式为:传动比=驱动齿轮齿数/被驱动齿轮齿数。
行星齿轮计算

传动型式高变位1、 太阳轮负变位,行星轮和内齿轮正变位。
即:-x A =x C =x Bx A 和x C 按手册图14-5-4及图14-5-5确定,也可按第一章的方法选择变位方式与变位系在渐开线行星齿轮传动中,合理采用变位齿轮可以获得如载能力,在保证所需传动比前提下得到合理的中心距、在保证装配及同心等条件下使齿数的选择具有较性。
变位齿轮有高变位和角变位,两者在渐开线行星齿轮传动中都有应用。
高变位主要用于消除根切和使轮的滑动比及弯曲强度大致相等。
角变位主要用于更灵活地选择齿数,拼凑中心距,改善啮合特性及提力。
由于高变位的应用在某些情况下受到限制,因此角变位在渐开线行星齿轮传动中应用更为广泛。
常用行星齿轮传动变位方式NGW 1、 太阳轮正变位,行星轮和内齿轮负变位。
即:x A =-x C =-x Bx A 和x C 按手册图14-5-4及图14-5-5确定,也可按第1章的方法选择4<B AX i 4≥B AX i角变位1、不等角变位应用较广。
通常使啮合角在下列范围外啮合:α'AC =24º~26º30'(个别甚至达29º50')内啮合:α'CB =17º30'~21º此法是在z A 和z B 不变,而将z C 减少1~2齿的情况下实现的。
这样可以显著提高外啮合的承载能力。
根据初选齿数,利用图14-5-4预计啮合角大小(初定啮合角于上述范围内);然后计算出x ∑AC 、x ∑CB ,最后按图14-5-5或第一章的方法分配变位系数2、等角变位各齿轮齿数关系不变,即:z A +z C =z B -z C变位系数之间的关系为:x B =2x C +x A变位系数大小以齿轮不产生根切为准。
总变位系数不能过大,否则影响内齿轮弯曲强度。
通常取啮合角α'AC =α'CB =22º对于直齿轮传动,当z A <z C 时推荐取 x A =x C =0.53、当传动比 时,推荐取α'AC =24º~25º,α'CB =20º,即外啮合为角变位,内啮合为高变位。
变位齿轮几何尺寸计算

变位齿轮几何尺寸计算
变位齿轮是齿轮传动系统中常用的一种齿轮,主要用于传递旋转运动和扭矩。
其特点是在齿轮齿条的侧面具有斜面,能够实现平滑传动和减小齿轮传动时的冲击和噪声。
在设计变位齿轮时,需要进行几何尺寸的计算来保证齿轮的运转性能。
变位齿轮的几何尺寸计算主要包括齿轮的模数、齿数、齿顶高和齿根深等参数。
下面将详细介绍每个参数的计算方法。
1.模数(m)的计算:
模数是齿轮齿条的基本尺寸,它表示齿轮齿条的大小。
模数的计算根据传动所需的扭矩和功率来确定,通常使用公式:
m=K∛(T/P)
其中,m为模数,K为系数(一般取20),T为传动所需扭矩,P为传动功率。
2.齿数(z)的计算:
齿数表示齿轮上的齿的数量。
齿数的计算根据传动比和模数来确定,一般使用公式:
z=m×i
其中,i为传动比。
3.齿顶高(h_a)和齿根深(h_f)的计算:
齿顶高表示齿轮齿条的最高点到齿顶的距离,齿根深表示齿轮齿条的最低点到齿底的距离。
它们的计算可以使用公式:
h_a=1.25×m
h_f=1.35×m
上述是变位齿轮几何尺寸计算的基本方法,但实际设计中还需要考虑齿轮的齿向角、齿轮间的啮合角、齿轮侧隙等因素。
此外,变位齿轮的几何尺寸还需要满足一些额外的要求,如齿轮的强度和刚度等。
关于变位齿轮几何尺寸计算的更详细内容可以参考相关的齿轮设计手册和专业参考书籍。
变位齿轮参数及计算
变位齿轮参数及计算齿轮是一种常用的传动装置,主要用于将转速和力量传递给其他机械设备。
变位齿轮是一种特殊类型的齿轮,其主要功能是改变传动比和方向。
1. 齿轮模数(Module):齿轮模数是反映齿轮尺寸的一个重要参数。
它定义了齿轮上每毫米的齿数。
齿轮模数的选择取决于传动的要求和设计规范。
2. 公法线半径(Pitch Radius):公法线半径是从齿轮齿面中心到齿廓处的距离。
它表示了齿轮大小的一个重要指标。
3. 夹角(Pressure Angle):夹角是齿轮齿廓线和法线之间的夹角。
常见的夹角有20度和14.5度两种。
夹角的选择取决于齿轮的使用条件和设计要求。
变位齿轮的计算方法主要包括齿数计算、齿廓绘制和传动比计算。
1.齿数计算:齿数计算是确定变位齿轮的基本参数之一、可以使用下列公式进行计算:Z1=N1/mZ2=N2/mZt=Z1+Z2其中,Z1和Z2分别为小齿轮和大齿轮的齿数,N1和N2为小齿轮和大齿轮的转速,m为齿轮模数,Zt为总齿数。
2.齿廓绘制:变位齿轮的齿廓是根据齿轮参数和齿轮轴心位置绘制出来的。
可以使用软件进行计算和绘制,也可以使用手动计算和绘图方法。
绘制齿廓时需要考虑齿轮的齿顶高度、齿根高度和齿廓曲线。
3.传动比计算:传动比是指变位齿轮传动时输出轴的转速与输入轴的转速之比。
可以用下列公式进行计算:i=Z2/Z1其中,i为传动比,Z1和Z2分别为小齿轮和大齿轮的齿数。
通过以上参数和计算步骤,可以确定变位齿轮的设计参数和计算结果。
齿轮的设计和计算是齿轮传动工程中的重要内容,合理的设计和计算可以保证齿轮传动的安全和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
行星齿轮传动具有体积小、重量轻、承载能力大及 效率高等优点,并广泛应用于各个行业。虽然我国已 生产有标准的行星齿轮减速器,但还是不能满足实际 使用的需要,有时往往需根据实际情况进行设计。行 星齿轮传动的设计包括多项内容,其中零件几何尺寸 的计算是必不可少的。我们在设计、测绘行星齿轮传 动的过程中,经常发现角变位行星齿轮传动中行星轮 几何尺寸的计算有几种方法,其结果却不一样。
齿根国奁径
办=南一2为(;南一2≤盎:+e‘一x#)m= 132—2(1+O.25一O.39)×4=125.12(nⅡn) 强顼疆蠢径
。0外=如+2^。c=如+2(矗:+靶~Anc)m=
132+2(1+O.39一O.077)×4=142,504(㈣)
2 o一转传动摇星耱A憾参数姆足寸戆专÷箨 来变位时中心距为
参考文献
l机械设计手册(第=版)·中册.北京:化学工业出版杜,19黜, 2辊辕设幸}手瓣<第一簸)t蒋3粒.1£束:税械王照穗驻社,1辨l。 3机械艘计手甜(第一版)-第6槛.北京;机械工业出版牡,19啦.
收稿日期:3000雌斟 嚣者麓奔:张栏攥<i9酷一),舞。嚣州害荣莓人,技枣辩瓣辩按,王狴烀Biblioteka 角变位行星齿轮几何尺寸的计算
4结论
从驻主诗冀耐鞭褥爨屯*<成蕊《如☆#熬绻
粜。为此,我们查阅了手册”’3’及有关的资料,辩此间 磁都枝有明确酌说胡。我们认为角变位行基齿轮传动 中,一般情提下外囔食和内啮金传动的蟛顶意变动系 数都是不一样的,齿顶高变动系数一样的情况,只是其 中嚣一个特翻。在设计时对角交位传动行麓齿轮足掰 尺寸的计算以哪种嘴台键动为准?我们认为,在行曼 齿轮传麓中,当行鏊轮与中心轮和浅齿黼闷时瞳合时, 则圣亍星辍的见俺参数、尺寸必须同时满怒外啮会和虎
曦合)镣穑诗算箭麓轮诲顶麓整经良*=i42.麟
m搬;按0一昱(虑啮食)传动计簿霉亍星轮馥顶爨直径 dz8:143.192 HIrn,两者相差d《^一d耕=143.192一 142,504= 万0。方6数88据E№,一般德撼下,对褥星轮采掰滚齿
法加工,内齿轮采用插齿法加工。
3按荦亍墨轮滚誊、内客罄矮齿滚诗冀熬纷纛裁起褥足专
分度圆直径砒=Mc=4×33=132(mm) 鸯根圄整径 蟊=d。一2盎敲=办一2(矗:+e。一zc)瓣盅
132—2(1+O.25一O.39)×4嚣125.12(fIml) 蠢船=鑫胡2+28挝=110+2x 12l。57=353。14(HHH}
齿顶圆赢径
吃c☆插茹如一2a一2G 5m= 353。14—2×103—2×O+25 x4=l醇.14(凇1)
第24卷第4期
角变位行星齿轮几何尺寸的计算
43
文章编号:100舡2539(20∞)04删3—02
角变位行星齿轮几何尺寸的计算
(芙蓉矿务局机电设备总厂,四川珙县644501) 张祖恒
摘要在行星齿轮传动中,通过举例计算,得出了角变位行星齿轮几何尺寸的不同计算结果,并分 析找出了正确的计算方法。
关键词行星齿轮角变位齿项高变动系数
本文链接:/Periodical_jxcd200004016.aspx
n㈣;署(如一拓)=要(树一33);I舛(㈣)
‰;垫;堂j趔:一o。25 中心箍交秘系数为 ,,档。———;i—一。——葺…。一u’z》
啮会角
c。s。。=警cos a=器。m缈=o,舛88
8m=18。2犁3矿
*£。慧=变(靠燕系 一数≈受)!!二:£!。
(85_33)嗵号Zmd警j“萨避=砘24l
所以,g¥为鳓=。∑翻+豫;一O.24l+0。39=O.1嘏 齿顶高变动系数为 △y露=(如~&)一,衄=(O;l蜉一0。39j一 (一O.25)=O.0。9 努发强蠢径为 如=H群f=4 x 33=132(mm) 齿檄圆直径
内齿轮捶刀选z。=25,&釜=1.25,按中等磨损群
菠考虑,#∞=o,或∞;m(铀+2五盏)=1lO(mm)。
播内齿时的嗡食角为
2i;了~¨”8 ”8m 2(w日一m观) .
2
裂8冬5—掣25+…im~拶。观。o…{9~8…7l…溺
撬内齿时的中心距
导(85嗡)器蚰1.卵(mm) 。∞2mi, t妇一。∞、,eo:s宙瓦。
Ⅱmc=号(铂+缸)=鲁(17+33)=100(m)
中心距变动系数为
nnc。2=—≮‘竽■一=堕2—产—=广o2.”‘,7s3
啮合角
a=器cos cos a。=:笋cos
200=o.912323
o“c=24。l盯l矿
总变位系数为
L“+2c广—五ii一2 ,
。∑^c 2
、inv口。_f—inv“
(17+33)鲤雩焉产鲨_0827
蟊=南一2蜘=南一2(A:+0+一龟)m= 132—2(1+o,25一O.39)×4互125。12(mm)
鸯谟疆壹径 d簖内=秸c+2^嘏=d。+2(危:+wG十△,缸)m=
i32+2(1+O.3挚十O.o∞)×4=143,192(mm) 以上对行星蟛轮几何尺寸的计算是按滚蝮加工方 法计算的。从上面的计算结粜可以看出,按A—c(外
啮合传动两个条件。既然有d∞"《4渊《d《自插,那
么瑗传动不产生手涉为蓊提条俘,行=鼙轮托何尺寸戴 必须以外啮合(A~e)传动(滚齿法)进行计算。文中 所述行星轮齿顶潮赢径就应为每。;142.504 nM。对 建蠢霾蔻鹰楚专述黻连港台(e一嚣)蒋雅(滚撬法戆 可)计算。这时,行鼹轮和内齿圈径向间隙有时可能稍 镶大,毽不影晦聩会传动。
为了便于说明,以手册”。第 64l页例题为例,计算过程如下:
已知NCw型行星传动(如图 1),模数m=4,中心轮齿数z。=
17,行星轮齿数z,=33,内齿圈齿
数卸=85,实际中心距o=103 万方数据
mm,试计算行星轮几何尺寸。
用l NGw型行星 传动简图
1 A—c传动行星轮几何参数与尺寸的计算 未变位时中心距为
作者: 作者单位: 刊名:
英文刊名: 年,卷(期):
张祖恒 芙蓉矿务局机电设备总厂,四川,珙县,644501
机械传动 JOURNAL OF MECHANICAL TRANSMISSION 2000,24(4)
参考文献(3条) 1.机械设计手册 1982 2.机械设计手册 1991 3.机械设计手册 1982
此值在手册’11图8—15a中,“∑∞介于P7~P8之
间,有利于提高齿轮接触强度及弯曲强度,故可用。
机械传动
200。年
变位系数按手册…图8—15b分配得*.=O.437,
觏=0+39。 馥顼琏变动系数为
△‰拳(耗+扎,一确e=(0。39十O.437>一O。75=O.∞7
分发隧直径鸯 吨=Mc=4 x 33=132(n1111)