三洋伺服R系列驱动器参数设定软件使用说明
山洋R系列驱动器说明书中文版

˙ػ相ց关ͱ机ͷ械݁的߹结ɾ合ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̒
˙औ允许ڐ承༰受ՙ负ॏ载ɾ ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̔
̎ɽ安औ装Γ ͚ <[α伺ʔ服Ϙ驱Ξ动ϯ器ϓ]>
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
ର即ྲྀ使ɼ是对ࣹͳ流Ͳ或ʹ者Α辐Δ射Թ造্成ঢ温͕度ߟ͑的Β上Ε升Δ,߹都Ͱ必须ɺ保αʔ证Ϙ伺Ξ服ϯ驱ϓͷ动ۙ器͘的附ඞͣ近的ˆ温Ҏ度Լʹ在ͳ55Δ℃Α以͏ʹ下͠。
RS3E motor setup 软件使用说明书M0010843C

目录
1. 系统概要 ......................................................................................... 1-1 1.1 功能概要......................................................................................... 1-1 1.2 配套机器......................................................................................... 1-2 1.3 系统环境......................................................................................... 1-2 1.4 程序的安装....................................................................................... 1-2 1.5 程序的卸载....................................................................................... 1-6
6. 诊断 ............................................................................................. 6-1 6.1 报警记录......................................................................................... 6-1 6.2 报警复位......................................................................................... 6-4 6.3 警告信息......................................................................................... 6-5
三洋伺服电机RS1快速入门手册

1.Page00:位置检测系统选择。 说明:00:绝对系统;01:增量系统。选择“增量系统”,可
不用给绝对编码器安装备用电池,按照增量式编码器的使用方法 来使用。
SMC Pneumatics (H.K.) Ltd.
五.常用参数设置(附表)。
SMC Pneumatics (H.K.) Ltd.
四.通常参数,第1组参数。
1. Page02:KP1 位置环比例增益1。 说明:当该设定值越大,马达定位速度越快,太大可能机器有振 动或者有噪音,调到适当的值。
2.Page13:KVP1 速度环比例增益1。 说明:当该设定值越大,马达反应速度越快,太大可能机器有振
动或者有噪音,调到适当的值。一般原则是:KP1<KVP1 3.Page14:TVI1 速度环积分时间常数1。
四.通常参数,第9组参数。
1.Page00:正转超程功能。 说明:当伺服马达处于正超程状态时,改变设置则可。 0C:当通用输入CONT6为ON时启动该功能 0D:ຫໍສະໝຸດ 通用输入CONT6为OFF时启动该功能
2.Page01:反转超程功能。 说明:当伺服马达处于负超程状态时,改变设置则可。 0A:当通用输入CONT5为ON时启动该功能 0B:当通用输入CONT5为OFF时启动该功能
3.Page05:伺服ON功能。改变该值可以选择是否需要伺服ON信号。 说明:02:当通用输入CONT1为ON时启动该功能。 03:当通用输入CONT1为OFF时启动该功能
SMC Pneumatics (H.K.) Ltd.
四.通常参数,第9组参数(图例)。
SMC Pneumatics (H.K.) Ltd.
2.选择编码器类型。 page 01:00表示增量式的编码器,01表示绝对式的编码器。
山洋RS1伺服调试快速入门手册

如果出现“Not Connected”, 检查电源或驱动器与电脑的 连接线,然后回到幻灯片 “连接驱动器-1”,按提示 操作。
点击 “Connected”
点击”Exit”完成设 点击”Exit”完成设 ”Exit” 置
马达参数设置-1
点击Parameter 选择Motor 点击Parameter ,选择Motor Parameter Setting
点击 “ Execute”
点击“OK” 点击“OK”完成操 作
脉冲点动- 2
2. 点击此键开始设置 1. 选择此项 3. 设定运行脉冲值 4. 设定速度值
点击“Write” 5. 点击“Write” 键
点击“ ON” 5. 点击“Servo ON”开始马达励磁
脉冲点动- 3
点击“ 点击“Servo OFF ”键停止马 达励磁
转矩控制模式
06 07 08 09 0A
: : : : :
131072 p/r ( 17 bit ) 262144 p/r (18 bit ) 524288 p/r ( 19 bit ) 1048576 p/r ( 20 bit ) 2097152 p/r (21 bit )
选择控制模式
00 : 转矩 / 01 : 速度 / 02 : 位置 / 09 位置环 编码器设置 外部编码器 分辨率设置 再生电阻设置
点击“ Execute” 点击““ Execute”
点击”OK”完成操 点击”OK”完成操 ”OK” 作
速度点动 - 2
1. 选择此 项 点击“Exit” 2. 点击“Exit”更改运行速度
4.点击“Edit” 4.点击“Edit”键 点击
3. 设定速度值
点击“ ON” 5. 点击“Servo ON”开始马达励磁
利用PC读取sanyo(三洋) R系列伺服驱动器参数
利用PC读取sanyo(三洋)R系列伺服驱动器参数方法与步骤
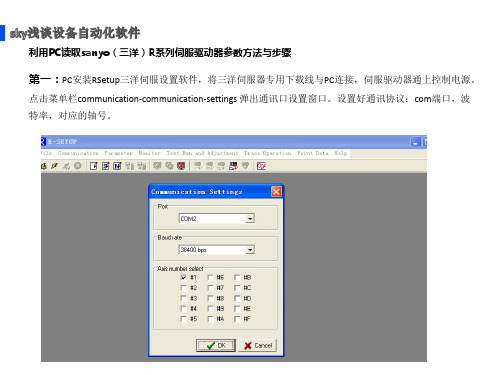
第一:PC安装RSetup三洋伺服设置软件,将三洋伺服器专用下载线与PC连接,伺服驱动器通上控制电源。
点击菜单栏communication-communication-settings 弹出通讯口设置窗口。设置好通讯协议:com端口,波 特率,对应的轴号。
parameter[amplifier->file],如左图,弹出parameter-transmit parameter窗口,点击browse将参数保存到一 个路径,点击execute,如右图
第四:将伺服驱动器参数上传至PC并保存为文件,点击R-setup软件菜单栏-parameter-transmit
parameter[amplifier->file],如左图,弹出parameter-transmit parameter窗口,点击browse将参数保存到一 个路径,点击execute,如右图
第五:查看伺服驱动器报警履历,点击菜单栏-monitor-alarm history display 弹出报警履历窗口,current
第二:点击R-setup软件菜单栏-c窗口。点击check,state
显示connected,表示三洋伺服驱动器与PC连接成功。
第三:将伺服驱动器参数上传至PC并保存为文件,点击R-setup软件菜单栏-parameter-transmit
伺服设置软件(MRZJW3-SETUP151E)的使用
页眉内容伺服设置软件(MRZJW3-SETUP151E)的使用MR-J2S系列伺服放大器具有RS-232C串行通讯功能,通过伺服设置软件(MRZJW3-SETUP151E),可以进行伺服参数设定、试运行、图形显示和增益调整等功能。
1.使用RS-232C电缆进行通讯当使用伺服设置软件控制一台MR-J2S时,PC机与MR-J2S伺服放大器间需通过RS-232C电缆进行通讯,如下图所示:RS-232C电缆接线图如下图所示:2.伺服设置软件介绍●Jogmode点动运行,本模式用来实现点动运行。
操作窗口如下图所示:给定伺服速度及加减速时间后即可进行伺服的点动试运行。
●Positioningmode定位运行,本模式用于位置模式控制。
操作窗口如下图所示:给定伺服速度、加减速时间及位置移动量脉冲数后即可以进行伺服的定位运行。
●Motor-lessoperationmode无电机模式,用来进行未连接伺服电机的伺服放大器仿真运行。
此模式对检测伺服系统控制器指令及接线是有效的。
操作窗口如下图所示:●DOforcedoutputmode(I/O强制输出模式),用于伺服放大器运行、停止强制输出信号,与输出条件无关。
操作窗口如下图所示:●Programoperationmode程序模式,用简单语言编程运行。
注意:●进行试运行时务必小心,错误操作可能导致机器损坏。
●在试运行时,选择相应的运行方式,然后进行加减速时间、正传/反转、转速、位置等参数的选择设定,即可以进行伺服的试运行。
●试运行模式用于对伺服系统的运行情况进行确认,而不是对机械运行情况进行确认。
因此试运行时不要连接机械部分。
●试运行模式在绝对位置系统中不能使用,使用参数№.1设定为增量位置系统后才能使用这种模式。
(5)伺服监视试运行期间,打开Monitor/Graph菜单,打开图形显示窗口,对伺服运行进行监控。
伺服运行图形显示窗口如下图所示:图形显示操作参见帮助“GRAPH”内容。
山洋RS2伺服参数设置

山洋R2系列伺服参数设置一、按键说明:(模式键):按一次,模式变换一个;(上键):在当前光标位置时,按一次数据增加1;(下键盘):在当前光标位置时,按一次数据减1;修改用户参数:/光标键):选择光标位置,确认当前模式并进入当前模式的编辑画面,保存数据时,按一秒钟以上。
二、修改用户参数:1、按“MODE”键,选择“Gr000”;2、用光标键选择需要修改的参数;3、用上键或下键修改数字;4、选好参数组后,按确认键进入参数编辑画面;5、用光标键“上键或下键”修改参数后,按确认键,待光标不闪电式时参数已保存;6、按“MODE”键退出编辑画面。
三、RS2系列的参数Gr 0.00 设为02 (手动增益模式)Gr 1.02 设为80 (KP1位置环增益值调整)Gr 1.12 设为100 (KVP1速度环增益值调整)Gr 1.13 设为20 (TVI1速度环积分时间常数值调整)Gr 1.14 设为100 (JRAT1负载惯量百分比值调整)Gr 8.00 设为00 (CMDPOL电机旋转方向调整,07为反方向)Gr 8.10 设为00(正反转脉冲),02为脉冲+方向(PMOD位置指令方式选择)Gr 8.12 设为00-07 (位置指令脉冲数字滤波器调整,R电机请设为07)Gr 8.13 设为电子齿轮的分子Gr 8.14设为电子齿轮的分母Gr 8.29设为速度控制模式下电压/转速设定,一般设为200rpm / VGr 9.00 设为0C(正传超程屏蔽)Gr 9.01 设为0A(反传超程屏蔽)Gr 9.05 设为01(SON内部使能)Gr C.04 设为2000/32768(电机转一圈驱动器反馈给上位电脑2000脉冲)Gr C.05 设为驱动器反馈编码器的A和Z相信号的极性Gr C.06 设为00(32768);01(8192)(电机转一圈驱动器可以反馈给上位电脑的脉冲数)Gr C.08 设为01(针对R系列电机)四、系统参数SY01 设为00为3相200V,01为单相200V。
山洋伺服电机RS2快速入门手册

CONT4
34
Off : 正常状态
On : 清零状态
CONT5(引脚33) : 限位(反向)
CONT5 33
Off : 碰到限位开关 On :正常状态 CONT6(引脚32) : 限位(正向)
CONT6
32
Off : 碰到限位开关 On :正常状态
通用输入接线: CONT1通用输入接线: CONT1-6 - 2
点击 “Servo On”,电机准 备运行 7段数码管的动作像在写 “8” 字。
点击一次此按钮, 电机正向运行, 并且在到达设定距离后停止。
点击一次此按钮, 电机反向运行, 并且在到达设定距离后停止。
定位操作 - 5
运行2次,3次或3次以上的一次点击... 1. 点击这里
2.多出两个参数出现在这 里
如何改参数如何改参数- 4
多个参数可以通过点击 一次 “Write to amplifier” 图标保存
电机参数设定
电机参数区
1.点击“Select from the list”(M) 按钮
2. 从这个列表中选择 旋转/直线电机, 输入电压 值, 驱动器容量以及电机部分型号 3. 点击 OK 4. 点击 “Write to amplifier” 图标 (与其他参数设置一样)
默认分配:
CONT7(引脚13,14) : 扭矩限制 Off : 无限制On : 限制 CONT8(引脚15,16) : 报警复位 Off : 正常状态On : 复位状态
TTL 信号
控制器单元 双绞线 13 14 38 SG 伺服驱动器 1.0k CONT7 150ohm CONT7 1.0k 1.0k 等效于 HD26C32 1.5k 1.0k
09
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1, R-setup 軟件的安裝
在軟件的安裝過程中, 會出現如下的畫面:
Select Language , 可選英語或日語;
Key Word , 無須輸入資料
,
安裝完畢之後, 在電腦桌面會出現
, 表示軟件已安裝好了.
2, 電源,驅動器和馬達的接線
在使用R-setup 之前,必需完成以下4項接線工序:
2.1, 馬達電源
把馬達電源的四條電線接連到驅動器, 接線顏色是紅/白/黑分別接U/V/W,青黃線接外殼(下圖1), 電線接好後, 雖然未上電, 馬達轉子已被鎖定, 請勿以外力轉動馬達, 帶煞車的馬達要注意開放煞車.(在此順帶一提, 所謂煞車, 實際上是一個抱閘器, 它並無制動的功能, 在使用時是馬達先停定, 然後抱閘, 煞車的線圈通常是接DC24V, 不分極向, 線圈無電時抱閘; 通電時釋放.)
2.2, 編碼器
編碼器電線插頭必須自行銲接, 接觸電線及銲接時請消除人體靜電及烙鐵靜電, 否則靜電有可能擊毀編碼器內部的器件, 而不小心銲錯接線也會燒壞編碼器, 編碼器的屏蔽線要接在插頭的壓線眶即插頭外殼上, 編碼器插頭插在CN2(下圖2).
2.3, 驅動器交流電源
驅動器接交流電源, 有些大功率的驅動器必需接上三相電源(相電壓220V)才能運作, 三相電源接法如圖5加上S相; 單相電源(220V)接法如圖5, 相線與中線(L 與N)任意接R與T; 且必須接上地線(下圖5), 接地不良會做成極大干擾, 甚至失控. 電源總開關的安裝請參閱操作手冊.
2.4, 電腦連線
與電腦COM端口連線(如圖6), 此接線需另外購買, 如手提電腦無COM接口, 可使用USB-RS232轉換線, 也能連上.
再次檢查所有接線無誤, 測量交流電源電壓是220V(三相相線也是220V), 就可以上電試機.
驅動器首次上電, 通常會有報警信息顯示如AL xx,可不理會,
3, R-setup 的使用的使用
3.1, 連線及參數的備份連線及參數的備份
R-SETUP 的主要功用是修改驅動器的三套參數, 即馬達參數, 系統參數及通用
參數, 在使用桌面的 進入程式後, 首先可按照下面的畫面連上電腦及作驅動器參數的備份, 下圖右邊下半部分所勾選的小窗口, 表示三套參數都已選擇備份, 備份目的是為了保証萬一錯誤修改參數後可以重灌, 恢復原來的參數. 其文件類型副檔名為ap0.
3.3.22, 馬達參數馬達參數的修改的修改的修改 修改馬達參數目的是讓驅動器知道所驅動的馬達型號, 從而與之匹配. . 請按照下面的畫面操作, 雖然馬達清單上有很多型號可供選擇, 用戶仍需按照其功率配套選用, 配套不當時, 驅動器將會報警, 嚴重失配會危害驅動器和馬達,
另外, 馬達清單並非包羅萬有, 個別特別型號或需要另外從製造商傳來ap0文件調用(備份的文件就是ap0文件), 或傳來mp0文件, 而只要把mp0文件放在如下指定的文件夾內, 該馬達就會在馬達清單上出現.
馬達參數修改之後, 請按下列離線及斷電關機步驟操作, 使其參數生效.
3.3, 離線及斷離線及斷電關機電關機電關機
每次斷電關機之前, , 都必須離線, 離線的方法如圖, 在關斷驅動器交流電源之後, 必須等候十秒鐘, 才可以重新上電.
3.4, 系統參數系統參數的修改的修改的修改 系統參數包括電源, 再生電阻等參數,
3.4.1, 交流電源的參數 交流電源的參數屬於系統參數的00頁, 請按下圖進行設定.
3.4.2, 控制方式
驅動器對馬達的控制方式屬於系統參數的08頁, 請按下圖進行設定
3.4.3, 再生電阻的設定
再生電阻的安裝與否, 請按下圖進行設定, 外置再生電阻的阻值, 功耗與安裝方法可參閱中文操作/使用說明書末章的資料10至資料17或英文Instruction Manual末章的Materials-Selection Details-External regenerative resistor / Dimension.然後請按本文3.3章所示, 進行離線及斷電關機步驟操作, 使其參數生效.
通用參數的修改
的修改
3.5, 通用參數
的修改
請注意通用參數修改并确認之後, 無須斷電關機, 新參數會立即生效.
3.5.1,修改畫面的顯示,以顯示更多的參數.
驅動器的通用輸入端CONT1-CONT6通常與上位裝置連接, 接受上位的控制, 通用輸入端的功能可被設定或更改, 下面給出用例及接線圖.
3.5.2,修改伺服ON的控制方式
驅動器上電之後, 必須要進入伺服ON狀態, 才可以接受指令, 馬達才能運轉, 請按照下圖選擇01:一上電就伺服ON.
下圖為CONT與CN1的接腳對照及上位信號的邏輯接法.
3.5.3,修改限位開關的控制方式
不使用限位開關的用戶, 必須把它設為無效, 否則驅動器面板會顯示一閃亮的斗字(正向到位)或卜字(反向到位)字形.
在進行了以上的設定及接線無誤的情況之下, 一上電, 驅動器應可立即進入伺服ON狀態, 此時驅動器面板會顯示一旋轉的8字字形.
3.6, 試車 Jogging operation.
運用試車可以驗證系統是否正常, 如果在試車當中發生報警, 可參閱操作/使用說明書第8章--保養的說明. 查找報警密碼的內容, 要消除驅動器報警, 請按本文3.3章所示, 進行離線及斷電關機步驟操作, 使其恢復. 另外應檢查所有接線, 交流電源電壓, 編碼器選擇(系統參數), 煞車(如有), 接線過長等等, 如果都不能解決, 可能是系統損壞了.
3.6.1, 試車方法如下圖:
能夠順利完成上述的試車實驗, 又沒有發生停車報警(退出時AL dF報警是正常)的話, 就說明機件正常及接線無誤.
3.7, 脈沖輸入方式設定
脈沖輸入方式設定
如果在本文第3.4.2章-控制方式中選擇了02:位置控制, 則可按照下圖設定脈沖的三種輸入方式
以下是兩種上位裝置至驅動器的脈沖輸入線路圖, 上位為集電極開路式的接法較為簡單, 但接線過長則易受干擾.
齒輪比設定
3.8, 齒輪比設定
如果在本文第3.4.2章-控制方式中選擇了02:位置控制, 則可按下圖設定齒輪比
脈沖倍頻
3.9, 脈沖倍頻
在使用R系列標準ABS編碼器馬達的場合(131072脈沖/轉), 在齒輪比1/1時, 要達到最高轉速6000rpm, 脈沖的頻率將要超過13MHz, 那已超出R驅動器的回路最大頻率響應值(5MHz), 在此情況下, 可使用脈沖倍頻(上圖第8組第14頁PCPMUL), 例如設定該值為16, 要達到6000rpm, 脈沖頻率為819.2KHz.
驅動器信號輸出
3.3.101010, , 驅動器信號輸出
驅動器有8個通用輸出端口(OUT1-OUT8), 用戶可選任一端口作任意信號輸出, 舉例如下圖:
下圖為OUT與CN1的接腳對照及邏輯接法:
請注意通用輸出端只作信號輸出, 其負載功率非常有限, 用戶如果把繼電器直接接上輸出端, 需清楚計算其功率, 及加上反壓吸收二極管, 否則有可能燒毀通用輸出端的元件.
伺服系統除了定位控制之外, 還有扭矩(力)控制和速度控制, 可按照本文第3.4.2章--“控制方式”所述, 選擇00:扭矩控制, 或01:速度控制, 驅動器伺服ON之後, 可按照下圖進入補償調整程式,以消除驅動器的靜態漂移,之後馬達應靜止不動.
在扭矩控制和速度控制時, 上位的模擬信號接法如下圖, REF端正電位高則正轉速/扭矩高, 負電位高則反轉速/扭矩高.
3.11自動調諧
自動調諧
將上圖的00頁TUNMODE設為00, 02頁ATRES設為10, 其餘參數不管, 繼續加大02頁ATRES的數值, 直至感覺到軸心出現振動或運轉時出現噪音, 就表示到了調諧的極限,.
附錄
4, 附錄
馬達的設定
4.4.11, R2馬達的設定
使用R2馬達(第3頁,圖05), 除了一般的設定之外, 還需要按下圖Group C的Page00設為Incremental, 甚至驅動器也可放入電池以保存編碼器的數據.
但是在使用其他馬達時, 則無需作此設定, 否則驅動器會顯示多一橫如下圖。