步进电机驱动电路用什么光耦隔离
3MA22100 步进电机驱动器使用手册说明书

3MA22100(三相高压)细分步进驱动器使用手册Version1.0版权所有 不得翻印【使用前请仔细阅读本手册,以免损坏驱动器】宁波纳川自动化科技有限公司3MA22100步进电机驱动器使用说明 在使用本品前,请仔细阅读本使用说明书请妥善保管本说明书,以备日后参考本册外观图片仅供参考,请以实物为准安全注意事项请勿带电插拔连接线缆。
此产品非密封,请勿在内部混入镙丝、金属屑等导电性异物或可燃性异物,储存和使用时请注意防潮防湿。
驱动器为功率设备,尽量保持工作环境的散热通风。
在连上步进电机,调节好电流后使其连续工作半小时后观察步进电机是否在额定温度后方可进行后续使用,如果电机温度过高请联系制造商。
一、产品简介1.1 产品概述3MA22100是纳川科技最新推出的一款采用精密电流控制技术设计的高细分步进电机驱动器,适合驱动110-130型各种品牌的三相混合式步进电机。
由于采用了先进的抗噪声控制方法,能大幅度降低电机运转时的噪声和振动,使得步进电机运转时的噪声和平稳性趋近于伺服电机的水平。
和市场上的大多数其他细分驱动产品相比,步进电机和驱动器的发热量降幅达15-30%。
1.2 产品特点⏹高性能、低价格、超低噪声⏹电机和驱动器发热极低⏹供电电压AC110-250V⏹输出电流峰值可达8.3A(均值5.86A)⏹输入电信号TTL兼容(5V兼容)⏹静止时电流自动减半⏹可驱动三相混合式步进电机⏹高速光耦隔离信号输入,脉冲响应频率最高可达100KHz⏹抗高频干扰能力强⏹输出电流设定方便⏹有过压、欠压、过流、过热、相间短路保护功能1.2 应用领域适合各种大型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、拿放装置等。
在用户期望低成本、小噪声、高速度的设备中效果特佳。
二、电气、机械和环境指标2.1 电气指标说明 3MA22100最小值 典型值 最大值 单位 输出电流 3.3(均值2.34)- 10(均值7.11) A 输入电源电压 110 180 250(含纹波)VAC 逻辑输入电流 7 10 16 mA 步进脉冲频率 0 - 40 KHZ 绝缘电阻500MΩ2.2 使用环境及参数冷却方式自然冷却使用环境场合 尽量避免粉尘、油雾及腐蚀性气体环境温度0℃-+50℃ 最高工作温度70℃湿度 40-90% RH9 (不能结露和有水珠)震动 5.9m/S2 Max 保存温度 -20℃-125℃ 重量约1500克2.3 机械安装图 单位:毫米2.4 加强散热方式(1)驱动器的可靠工作温度通常在65℃以内,电机的工作温度在80℃以内;(2)安装驱动器时请采用竖着侧面安装,形成较强的空气对流,必要时机内靠近驱动器出安装风扇,强制散热,保证驱动器在可靠的工作温度范围内工作。
步进电机驱动器控制信号接口说明
...步进电机驱动器控制信号接口说明驱动器是把计算机控制系统提供的弱电信号放大为步进电机能够接受的强电流信号,控制系统提供给驱动器的信号主要有以下三路: 1.步进脉冲信号CP:这是最重要的一路信号,因为步进电机驱动器的原理就是要把控制系统发出的脉冲信号转化为步进电机的角位移,或者说:驱动器每接受一个脉冲信号CP,就驱动步进电机旋转一步距角, CP的频率和步进电机的转速成正比, CP的脉冲个数决定了步进电机旋转的角度。
这样,控制系统通过脉冲信号CP就可以达到电机调速和定位的目的。
2.方向电平信号DIR:此信号决定电机的旋转方向。
比如说,此信号为高电平时电机为顺时针旋转,此信号为低电平时电机则为反方向逆时针旋转。
此种换向方式,我们称之为单脉冲方式。
另外,还有一种双脉冲换向方式:驱动器接受两路脉冲信号(标注为CW和CCW),当其中一路(如CW)有脉冲信号时,电机正向运行,当另一路(如CCW)有脉冲信号时,电机反向运行。
用户使用何种方式,由拨位开关设定。
3.使能信号EN:此信号在不连接时默认为有效状态,这时驱动器正常工作。
当此信号回路导通时,驱动器停止工作,这时电机处于无力矩状态(等同于本公司SH系列驱动器的FREE信号),此信号为选用信号。
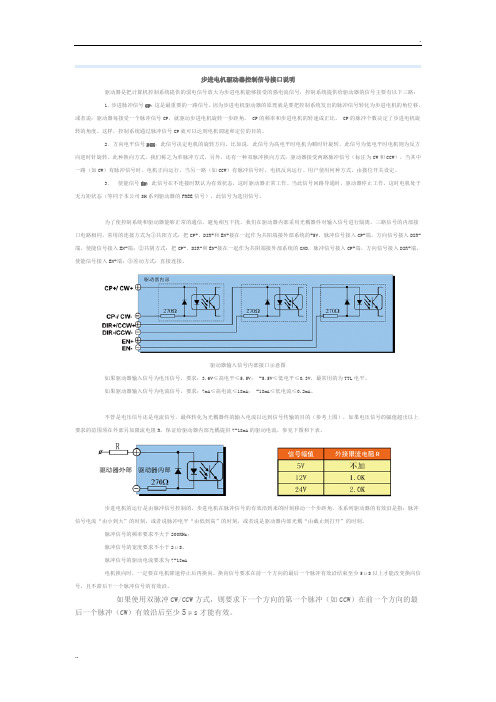
为了使控制系统和驱动器能够正常的通信,避免相互干扰,我们在驱动器内部采用光耦器件对输入信号进行隔离,三路信号的内部接口电路相同,常用的连接方式为①共阳方式:把CP+、DIR+和EN+接在一起作为共阳端接外部系统的+5V,脉冲信号接入CP-端,方向信号接入DIR-端,使能信号接入EN-端;②共阴方式:把CP-、DIR-和EN-接在一起作为共阴端接外部系统的GND,脉冲信号接入CP+端,方向信号接入DIR+端,使能信号接入EN+端;③差动方式:直接连接。
驱动器输入信号内部接口示意图如果驱动器输入信号为电压信号,要求:3.6V≤高电平≤5.5V; -5.5V≤低电平≤0.3V,最常用的为TTL电平。
步进电机驱动器控制信号接口说明【详】
驱动器是把计算机控制系统提供的弱电信号放大为步进电机能够接受的强电流信号,控制系统提供给驱动器的信号主要有以下三路:1.步进脉冲信号CP:这是最重要的一路信号,因为步进电机驱动器的原理就是要把控制系统发出的脉冲信号转化为步进电机的角位移,或者说:驱动器每接受一个脉冲信号CP,就驱动步进电机旋转一步距角,CP的频率和步进电机的转速成正比,CP的脉冲个数决定了步进电机旋转的角度。
这样,控制系统通过脉冲信号CP就可以达到电机调速和定位的目的。
2.方向电平信号DIR:此信号决定电机的旋转方向。
比如说,此信号为高电平时电机为顺时针旋转,此信号为低电平时电机则为反方向逆时针旋转。
此种换向方式,我们称之为单脉冲方式。
另外,还有一种双脉冲换向方式:驱动器接受两路脉冲信号(标注为CW和CCW),当其中一路(如CW)有脉冲信号时,电机正向运行,当另一路(如CCW)有脉冲信号时,电机反向运行。
用户使用何种方式,由拨位开关设定。
3.使能信号EN:此信号在不连接时默认为有效状态,这时驱动器正常工作。
当此信号回路导通时,驱动器停止工作,这时电机处于无力矩状态(等同于本公司SH系列驱动器的FREE信号),此信号为选用信号。
为了使控制系统和驱动器能够正常的通信,避免相互干扰,我们在驱动器内部采用光耦器件对输入信号进行隔离,三路信号的内部接口电路相同,常用的连接方式为①共阳方式:把CP+、DIR+和EN+接在一起作为共阳端接外部系统的+5V,脉冲信号接入CP-端,方向信号接入DIR-端,使能信号接入EN-端;②共阴方式:把CP-、DIR-和EN-接在一起作为共阴端接外部系统的GND,脉冲信号接入CP+端,方向信号接入DIR+端,使能信号接入EN+端;③差动方式:直接连接。
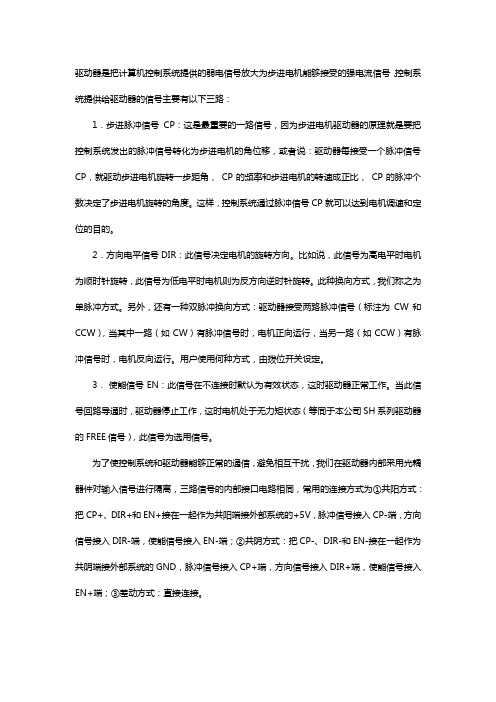
驱动器输入信号内部接口示意图如果驱动器输入信号为电压信号,要求:3.6V≤高电平≤5.5V;-5.5V≤低电平≤0.3V,最常用的为TTL电平。
如果驱动器输入信号为电流信号,要求:7mA≤高电流≤18mA;-18mA≤低电流≤0.2mA。
光耦简介及常见型号
常用光耦简介及常见型号光电耦合器(简称光耦)是开关电源电路中常用的器件。
光电耦合器分为两种:一种为非线性光耦,另一种为线性光耦。
常用的4N系列光耦属于非线性光耦常用的线性光耦是PC817A—C系列。
非线性光耦的电流传输特性曲线是非线性的,这类光耦适合于弄开关信号的传输,不适合于传输模拟量。
线性光耦的电流传输手特性曲线接进直线,并且小信号时性能较好,能以线性特性进行隔离控制。
开关电源中常用的光耦是线性光耦。
如果使用非线性光耦,有可能使振荡波形变坏,严重时出现寄生振荡,使数千赫的振荡频率被数十到数百赫的低频振荡依次为号调制。
由此产生的后果是对彩电,彩显,VCD,DCD等等,将在图像画面上产生干扰。
同时电源带负载能力下降。
在彩电,显示器等开关电源维修中如果光耦损坏,一定要用线性光耦代换。
常用的4脚线性光耦有PC817A----C。
PC111 TLP521等常用的六脚线性光耦有:TLP632 TLP532 PC614 PC714 PS2031等。
常用的4N25 4N26 4N35 4N36是不适合用于开关电源中的,因为这4种光耦均属于非线性光耦。
经查大量资料后,以下是目前市场上常见的高速光藕型号:100K bit/S:6N138、6N139、PS87031M bit/S:6N135、6N136、CNW135、CNW136、PS8601、PS8602、PS8701、PS9613、PS9713、CNW4502、HCPL-2503、HCPL-4502、HCPL-2530(双路)、HCPL-2531(双路)10M bit/S:6N137、PS9614、PS9714、PS9611、PS9715、HCPL-2601、HCPL-2611、HCPL-2630(双路)、HCPL-2631(双路)光耦合器的增益被称为晶体管输出器件的电流传输比(CTR),其定义是光电晶体管集电极电流与LED正向电流的比率(ICE/IF)。
光电晶体管集电极电流与VCE有关,即集电极和发射极之间的电压。
基于IRF530和AT89S52的步进电机驱动控制器

基于IRF530和AT89S52的步进电机驱动控制器姜伟伟;高云国;韩光宇;张文豹;宋曙光【摘要】研制了一种基于MCS-51系列单片机AT89S52控制及由MOS管IRF530驱动的步进电机驱动控制器,控制器和驱动器之间采用TLP521光耦器件隔离,更好地保护了单片机的电气安全.设计了控制器与PC计算机串口通信,由PC发送执行指令使驱动控制器更方便地应用于各种位置控制场合.由于摒弃了步进电机传统的环形分配器方式控制,所以两相或者多相的中小功率步进电机均可使用该方法设计驱动器.试验结果表明:由单片机产生的矩形波经IRF530放大后波形良好,步进电机的驱动力矩足够,利用该方法设计的驱动控制器具有电路设计结构简单、软件编程容易和价格低廉等优点.【期刊名称】《电机与控制应用》【年(卷),期】2010(037)012【总页数】4页(P43-46)【关键词】步进电机;驱动控制器;单片机【作者】姜伟伟;高云国;韩光宇;张文豹;宋曙光【作者单位】中国科学院,长春光学精密机械与物理研究所,吉林,长春,130033;中国科学院,研究生院,北京,100039;中国科学院,长春光学精密机械与物理研究所,吉林,长春,130033;中国科学院,长春光学精密机械与物理研究所,吉林,长春,130033;中国科学院,长春光学精密机械与物理研究所,吉林,长春,130033;中国科学院,长春光学精密机械与物理研究所,吉林,长春,130033【正文语种】中文【中图分类】TM383.60 引言步进电机又称脉冲电机,能将数字脉冲输入转换成相应的角度或直线增量运动。
每输入一个脉冲,步进电机旋转的固定角度称之为步距角,所以从控制学的角度可以把步进电机看成是没有角度和角速度反馈的开环控制伺服电机。
由于步进电机具有转子惯量低、无漂移和无积累定位误差的优点,所以在打印机、绘图机、数控机床等设备中得到广泛应用[1-3]。
传统的步进电机驱动方式为环形分配器+驱动器的方式,但是该驱动方式局限性在于只能驱动相数一定、额定电压一定的步进电机。
光电耦合器原理及使用

光电耦合器,又称光耦,万联芯城销售原装现货光耦元件,品牌囊括TOSHIBA,LITEON,EVERLIGHT,VISHAY等。
型号种类繁多,万联芯城为终端生产企业提供电子元器件一站式配套服务,节省了客户的采购成本。
点击进入万联芯城点击进入万联芯城光耦使用技巧光电耦合器(简称光耦),是一种把发光元件和光敏元件封装在同一壳体内,中间通过电→光→电的转换来传输电信号的半导体光电子器件。
光电耦合器可根据不同要求,由不同种类的发光元件和光敏元件组合成许多系列的光电耦合器。
目前应用最广的是发光二极管和光敏三极管组合成的光电耦合器,其内部结构如图1a所示。
光耦以光信号为媒介来实现电信号的耦合与传递,输入与输出在电气上完全隔离,具有抗干扰性能强的特点。
对于既包括弱电控制部分,又包括强电控制部分的工业应用测控系统,采用光耦隔离可以很好地实现弱电和强电的隔离,达到抗干扰目的。
但是,使用光耦隔离需要考虑以下几个问题:①光耦直接用于隔离传输模拟量时,要考虑光耦的非线性问题;②光耦隔离传输数字量时,要考虑光耦的响应速度问题;③如果输出有功率要求的话,还得考虑光耦的功率接口设计问题。
1 光电耦合器非线性的克服光电耦合器的输入端是发光二极管,因此,它的输入特性可用发光二极管的伏安特性来表示,如图1b所示;输出端是光敏三极管,因此光敏三极管的伏安特性就是它的输出特性,如图1c所示。
由图可见,光电耦合器存在着非线性工作区域,直接用来传输模拟量时精度较差。
图1 光电耦合器结构及输入、输出特性解决方法之一,利用2个具有相同非线性传输特性的光电耦合器,T1和T2,以及2个射极跟随器A1和A2组成,如图2所示。
如果T 1和T2是同型号同批次的光电耦合器,可以认为他们的非线性传输特性是完全一致的,即K1(I1)=K2(I1),则放大器的电压增益G=Uo/U1=I3R3/I2R2=(R3/R2)[K1(I1)/K2(I1)]=R3/R2。
由此可见,利用T1和T2电流传输特性的对称性,利用反馈原理,可以很好的补偿他们原来的非线性。
光耦的使用者注意事项

光电耦合器(简称光耦),是一种把发光元件和光敏元件封装在同一壳体内,中间通过电→光→电的转换来传输电信号的半导体光电子器件。
光电耦合器可根据不同要求,由不同种类的发光元件和光敏元件组合成许多系列的光电耦合器。
目前应用最广的是发光二极管和光敏三极管组合成的光电耦合器,其内部结构如图1a所示。
光耦以光信号为媒介来实现电信号的耦合与传递,输入与输出在电气上完全隔离,具有抗干扰性能强的特点。
对于既包括弱电控制部分,又包括强电控制部分的工业应用测控系统,采用光耦隔离可以很好地实现弱电和强电的隔离,达到抗干扰目的。
但是,使用光耦隔离需要考虑以下几个问题:① 光耦直接用于隔离传输模拟量时,要考虑光耦的非线性问题;② 光耦隔离传输数字量时,要考虑光耦的响应速度问题;③ 如果输出有功率要求的话,还得考虑光耦的功率接口设计问题。
1 光电耦合器非线性的克服光电耦合器的输入端是发光二极管,因此,它的输入特性可用发光二极管的伏安特性来表示,如图1b所示;输出端是光敏三极管,因此光敏三极管的伏安特性就是它的输出特性,如图1c所示。
由图可见,光电耦合器存在着非线性工作区域,直接用来传输模拟量时精度较差。
图1 光电耦合器结构及输入、输出特性解决方法之一,利用2个具有相同非线性传输特性的光电耦合器,T1和T2,以及2个射极跟随器A1和A2组成,如图2所示。
如果T1和T2是同型号同批次的光电耦合器,可以认为他们的非线性传输特性是完全一致的,即K1(I1)=K2(I1),则放大器的电压增益G=Uo/U1=I3R3/I2R2=(R3/R2)[K1(I1)/K2(I1)]=R3/R2。
由此可见,利用T1和T2电流传输特性的对称性,利用反馈原理,可以很好的补偿他们原来的非线性。
图2 光电耦合线性电路另一种模拟量传输的解决方法,就是采用VFC(电压频率转换)方式,如图3所示。
现场变送器输出模拟量信号(假设电压信号),电压频率转换器将变送器送来的电压信号转换成脉冲序列,通过光耦隔离后送出。
光耦隔离的4种常见方法对比
光耦隔离的4种常见方法对比在一般的隔离电源中,光耦隔离反馈是一种简单、低成本的方式。
但对于光耦反馈的各种连接方式及其区别,目前尚未见到比较深入的研究。
而且在很多场合下,由于对光耦的工作原理理解不够深入,光耦接法混乱,往往导致电路不能正常工作.本研究将详细分析光耦工作原理,并针对光耦反馈的几种典型接法加以对比研究.1 常见的几种连接方式及其工作原理常用于反馈的光耦型号有TLP521、PC817等。
这里以TLP521为例,介绍这类光耦的特性。
TLP521的原边相当于一个发光二极管,原边电流If越大,光强越强,副边三极管的电流Ic越大。
副边三极管电流Ic与原边二极管电流If的比值称为光耦的电流放大系数,该系数随温度变化而变化,且受温度影响较大。
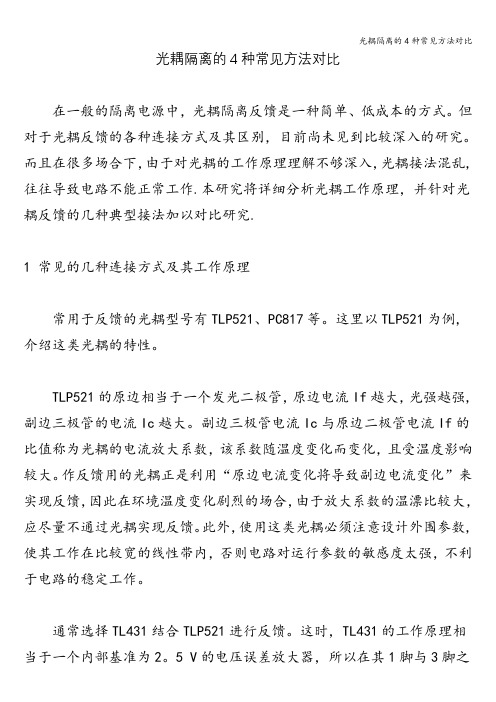
作反馈用的光耦正是利用“原边电流变化将导致副边电流变化”来实现反馈,因此在环境温度变化剧烈的场合,由于放大系数的温漂比较大,应尽量不通过光耦实现反馈。
此外,使用这类光耦必须注意设计外围参数,使其工作在比较宽的线性带内,否则电路对运行参数的敏感度太强,不利于电路的稳定工作。
通常选择TL431结合TLP521进行反馈。
这时,TL431的工作原理相当于一个内部基准为2。
5 V的电压误差放大器,所以在其1脚与3脚之间,要接补偿网络.常见的光耦反馈第1种接法,如图1所示.图中,Vo为输出电压,Vd 为芯片的供电电压。
com信号接芯片的误差放大器输出脚,或者把PWM 芯片(如UC3525)的内部电压误差放大器接成同相放大器形式,com信号则接到其对应的同相端引脚。
注意左边的地为输出电压地,右边的地为芯片供电电压地,两者之间用光耦隔离。
图1所示接法的工作原理如下:当输出电压升高时,TL431的1脚(相当于电压误差放大器的反向输入端)电压上升,3脚(相当于电压误差放大器的输出脚)电压下降,光耦TLP521的原边电流If增大,光耦的另一端输出电流Ic增大,电阻R4上的电压降增大,com引脚电压下降,占空比减小,输出电压减小;反之,当输出电压降低时,调节过程类似。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机驱动电路用什么光耦隔离?
作者:czhlcai栏目:单片机
步进电机驱动电路用什么光耦隔离?
驱动电路自已做,都用什么光耦
如果步进电机最高也就800PPS,TLP521行吗?
如果是3000PPS,是不是521就不行了?那要用什么光耦?
>>参与讨_liang于 2007-3-6 14:43:00 发布:
不好!
讲沿~~
>>参与讨way于 2007-3-6 14:52:00 发布:
每相的可以,如果是斩波频率或输入信号建议6N137
日产,不建议使用,建议使用K3010直接替代,免费样品请联系我
>>参与讨论
应该没问题吧!
直流的,打开后不就关不断了吗?TLP521有4路,其它还有合适的吗?最好是4路的,不然太占地方,因为我想控制两个电机。
>>参与讨论
>>参与讨论
>>参与讨cai于 2007-3-8 14:53:00 发布:
里找到的
P1040,K1030是冠西的,台系的。
不知道价格比520便宜多少?。