信号与线性系统七八章习题答案
信号与线性系统分析习题答案

信号与线性系统课后答案第一章 信号与系统(一)1-1画出下列各信号的波形【式中)()(t t t r ε=】为斜升函数。
(2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 解:各信号波形为 (2)∞<<-∞=-t e t f t ,)((3))()sin()(t t t f επ=(4))t fε=(sin)(t(5))t f=r)(t(sin(7))(t f kε2)(k=(10))(])1k(kf kε()1[=-+1-2 画出下列各信号的波形[式中)()(t t t r ε=为斜升函数]。
(1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f(5))2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε(11))]7()()[6sin()(--=k k k k f εεπ (12))]()3([2)(k k k f k---=εε 解:各信号波形为 (1))2()1(3)1(2)(-+--+=t t t t f εεε(2))2()1(2)()(-+--=t r t r t r t f(5))2()2()(t t r t f -=ε(8))]5()([)(--=k k k k f εε(11))]7()()[6sin()(--=k k k k f εεπ(12))]()3([2)(k k k f k ---=εε1-3 写出图1-3所示各波形的表达式。
1-4 写出图1-4所示各序列的闭合形式表达式。
1-5 判别下列各序列是否为周期性的。
信号与系统王明泉1-8章完整答案

第1章信号与系统的概述1.1 学习要求(1)了解信号与系统的基本概念与定义,会画信号的波形;(2)了解常用基本信号的时域描述方法、特点与性质,并会灵活应用性质;(3)深刻理解信号的时域分解、运算的方法,会求解;(4)深刻理解线性是不变系统的定义与性质,会应用性质求解系统1.2 本章重点(1)基本的连续时间信号的时域描述和时域特性;(2)单位冲激信号的定义、性质与应用;(3)信号的时域运算及其综合应用;(4)线性时不变系统的性质与应用。
1.3 本章的知识结构1.4 本章的内容摘要1.4.1信息、消息和信号的概念所谓信息,是指存在于客观世界的一种事物形象,一般泛指消息、情报、指令、数据和信号等有关周围环境的知识。
消息是指用来表达信息的某种客观对象,如电报中的电文、电话中的声音、电视中的图像和雷达探测的目标距离等等都是消息。
所谓信号,是指消息的表现形式,是带有信息的某种物理量,如电信号、光信号和声信号等等。
信号代表着消息,消息中又含有信息,因此信号可以看作是信息的载体。
1.4.2信号的分类以信号所具有的时间函数特性来加以分类,可以将信号分为确定信号与随机信号、连续时间信号与离散时间信号、周期信号与非周期信号、能量信号与功率信号、实信号与复信号等等。
1.4.3 常用信号 (1)正弦型信号)cos()(ϕω+=t A t f (1-3)(2)指数信号st Ae t f =)( (1-8)(3)矩形脉冲⎪⎩⎪⎨⎧><=2/02/1)(ττt t t f(4)三角脉冲⎪⎩⎪⎨⎧>≤-=2/02/21)(τττt t tt f (1-18)(5)抽样信号ttt sin )Sa(=(1-19)性质:(1))Sa()Sa(t t =-,偶函数 (2)1)Sa(,0==t t ,即1)Sa(lim 0=→t t(3)π,0)Sa(n t t ±==, 3,2,1=n (4)⎰∞=02πd sin t t t ,⎰∞∞-=πd sin t tt(5)0)Sa(lim =±∞→t t该函数的另一表示式是辛格函数,其表示式为ttsi t c ππn )(sin =(1-20) (6) 斜变信号⎩⎨⎧≥<=000)(t t t t f (1-24)(7)单位阶跃信号⎩⎨⎧><=0100)(t t t u 或⎩⎨⎧><=-0100)(000t t t t u如果矩形脉冲对于纵坐标左右对称,则可用)(t G T)2()2()(Tt u T t u t G T --+=下标T 表示其矩形脉冲宽度。
信号与系统课后答案第八章作业答案后半部分

频率响应为
H
(e jΩ
)
=
H
(z)
|z = e jΩ
=
4 ⎡⎣ejΩ −1⎤⎦
3
⎡⎢⎣e
jΩ
−
1 3
⎤ ⎥⎦
经计算得极点为 p = 1 ,零点为 z = 1。 3
H(e jΩ)
(Ω)
幅频响应图(横坐标进行了归一化处理)
(c)Yx (z) =
y(−1) + 2 y(−2) + 2 y(−1)z−1 1− z−1 − 2z−2
=
8⋅ z +1⋅ 3 z−2 3
z, z +1
z
>2
其逆
z
变换即零输入响应为
yx
(n)
=
8 3
⋅
2n
u(n)
+
1 3
⋅
(−1)n
u(n)
(d)根据上面计算的零输入和零状态响应可知系统的完全响应为
f (n) = (−1)n u(n) , y(−1) = 0 , y(−2) = 1;
解:(1)将原式两边取单边 Z 变换得,
Y (z) −[z−1Y (z) + y(−1)] − 2[z−2Y (z) + y(−2) + y(−1)z−1] = F (z) + z−1F (z)
整理得:
Y (z)
=
题图 8-23
根据系统框图可得 h(n) = h1(n) ∗[h2 (n) + h3 (n)] ,故 h(n) = δ (n) ∗[h2 (n) + h3(n)] = u(n) + u(n − 2)
信号与系统课后习题参考答案.pdf

-5
-4 -3 -2
-1
2 1
2
3
-1
x(-t+4)
t
45
6
2 1
4
6
-1
x(-t/2+4)
t 8 10 12
(e)[x(t)+x(-t)]u(t)
-2
-1
2
x(-t)
1
t
01
2
-1
(f)
x(t)[δ(t +
3) − δ(t - 3)]
2
2
3
[x(t)+x(-t)]u(t)
1 t
01
2
-1
-3/2 (-1/2)
x(t)[δ(t + 3) − δ(t - 3)]
2
2
3/2
t
0 (-1/2)
6
1.22
(a)x[n-4]
x[n-4]
11 1 1
1/2 1/2
1/2 n
0 1 23 4 5 6 7 8
-1/2
-1
(b)x[3-n]
x[n+3]
11 1 1
1/2 1/2
1/2 n
-7 -6 -5 -4 -3 -2 -1 0 1
=
2π 4
=π 2
则:整个信号的周期为:T = LCM{T1,T2} = π
1.11
j 4πn
解: e 7
→
ω1
=
4πn 7
,则:
2π ω1
=
2π 4π
=7= 2
N1 k
,⇒
N1
=
7
7
j 2πn
e5
→ ω2
信号与系统第七章课后答案
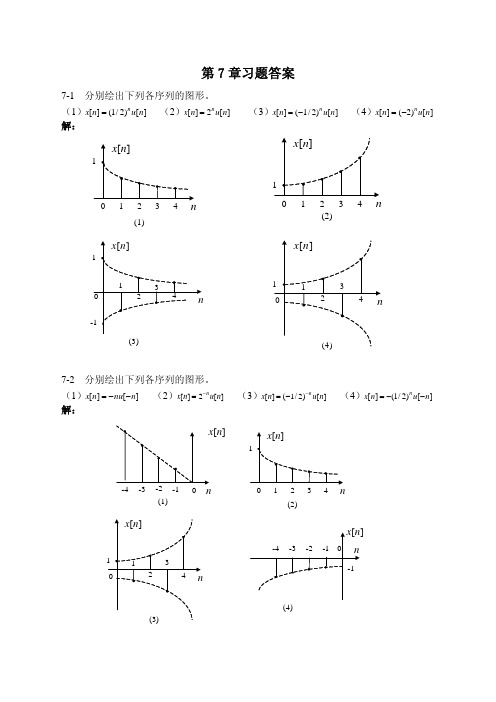
7-1 分别绘出下列各序列的图形。 (2)x[n] 2n u[n] (3)x[n] (1/ 2)n u[n] (4)x[n] (2) n u[ n] (1)x[n] (1/ 2)n u[n] 解:
x[ n ]
1
x[n]
1
0 1 2 (1) 3 4
n
0
1
2 3 (2)
x[n]
1
x[n]
-4
-3
-2 (1)
-1
0
n
0
1
2 (2)
3
4
n
x[n]
-4 1 0 1 2 3 4 -3 -2 -1 0
x[n] n
-1
n
(4)
(3)
7-3
分别绘出下列各序列的图形。 (2) x[n] cos
n 10 5
n (1) x[n] sin 5
1 z2 X (z) ( 1 1 2 z 1 )( 1 2 z 1 ) ( z 1 2 )( z 2 ) X (z) z 1 4 z ( z 1 2 )( z 2 ) 3( z 1 2 ) 3( z 2 )
X (z)
z 4z 3( z 1 2 ) 3 ( z 2 )
N
)
由于 x[n] 、 h[n] 均为因果序列,因此 y[n] 亦为因果序列,根据移位性质可求得
y [ n ] Z 1 [Y ( z )]
1 1 (1 a n 1 ) u [ n ] (1 a n 1 N ) u [ n N ] 1 a 1 a
7-24 计算下列序列的傅里叶变换。
(2)
信号与线性系统分析知到章节答案智慧树2023年山东理工大学

信号与线性系统分析知到章节测试答案智慧树2023年最新山东理工大学第一章测试1.信号f(t)的尺度变换以下将信号()参考答案:f(at)2.下列关于冲激函数性质的表达式不正确的是()。
参考答案:3.试确定信号的周期 ( ).参考答案:164.某连续时间系统的输入f(t)和输出y(t)满足,则该系统为( )参考答案:因果、时不变、非线性5.若f(t)是已录制声音的磁带,则下列表述错误的是 ( ) 。
参考答案:f(2t)表示原磁带放音速度降低一半播放6.离散时间LTI系统的单位序列响应有界,则该系统是稳定系统。
()参考答案:错7.信号f (t) = cos(πt)ε(t)为周期信号。
()参考答案:错8.所有非周期信号都是能量信号。
()参考答案:错9.一离散时间系统系统的输入、输出关系为,该系统为:因果系统()参考答案:对10.,该信号周期为12()。
参考答案:错11.已知f(t)的波形如下图,则的波形为如下A图,是否正确?()参考答案:对12.已知信号f1(t) 如下图所示,其表达式是()参考答案:B13.的计算结果为()参考答案:314.判断系统的线性、时不变性、因果性、稳定性()参考答案:非线性、时不变、因果、稳定15.线性系统具有()参考答案:全部为正确第二章测试1.对连续信号延迟t0的延时器的单位阶冲激应为()参考答案:2.下列总系统的单位冲激响应 h(t)=( )参考答案:3.已知:,求, s(t)的波形哪个正确()。
参考答案:4.已知,,则的非零值区间为[0,3]。
()参考答案:对5.若,则。
()参考答案:对6.一个系统的自由响应就等于它的零输入响应。
()参考答案:错7.两个线性时不变系统的级联构成的系统是线性时不变的。
()参考答案:对8.设某线性系统的单位冲激响应为,为系统的输入,则是系统的 ( )。
参考答案:零状态响应9.为 ( )参考答案:10.信号波形如图所示,设,则f(0)为()。
信号与系统课后习题参考答案
1.20
解:(a)
x1 (t)
=
cos( 2t )
=
1 2
(e j2t
+
e− j2t
)
则:
y1 (t)
= T{1 (e j2t 2
+ e − j2t )} =
1 (e j3t 2
+ e − j3t ) ;
(b)
x2 (t)
=
cos(2(t
−
1 )) 2
=
1 (e j(2t−1) 2
+ e − j(2t−1) )
-1/2
-1
1 1/2 -2 -1 0 1
1 1 1 x[-n+3]
1/2 n
678 2 34 5
-1/2 -1
(c) x[3n]
1 x[3n]
1/2 n
-4 -3 -2 -1 0 1 2 3 -1/2
7
(d) x[3n+1]
x[n+1]
11 1 1
1/2 1/2
1/2 n
-5 -4 -3 -2 -1 0 1 2 3
x(t)[δ(t + 3) − δ(t - 3)]
2
2
3/2
t
0 (-1/2)
6
1.22
(a)x[n-4]
x[n-4]
11 1 1
1/2 1/2
1/2 n
0 1 23 4 5 6 7 8
-1/2
-1
(b)x[3-n]
x[n+3]
11 1 1
1/2 1/2
1/2 n
-7 -6 -5 -4 -3 -2 -1 0 1
-5
-4 -3 -2
信号与系统第七章课后习题答案

k 1
z
1
k
1 z 1 z
0 z
F( z )
k 1
f (k )z k
k
[(k 1) (k 2)]z k z2 z 1 z
k 1
z k z 1 z 1
例 7.1- 2 已知无限长因果序列f(k)=akε(k)。求f(k)
d d k f ( k ) ( z ) ( z ) F ( z ) z dz dz
d d d z k f ( k ) ( z ) z F ( z ) dz dz dz
|a|<|z|<|b|
Im[z]
Im[z] |a |
Im[z]
|a | o Re[z] o Re[z] o
|a|
Re[z] |b |
(a)
(b)
(c)
图 7.1-1 例7.1-2、例7.1-3、例7.1-4图
7.1.3 常用序列的双边Z变换
(1) f (k ) (k )。
F ( z)
k
例 7.2-3 已知
1 k 1 f (k ) 3 (k 1), 2
k
求f(k)的双边Z变换及其收敛域。 解 令f1(k)=3k+1ε(k+1),则有
1 f ( k ) f1 ( k ) 2
z z2 由于 F1 ( z ) Z [ f1 (k )] z z3 z3
k
(k ) z k 1
(2) f1 (k ) (k m), f 2 (k ) (k m), m为正整数.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第七、八章习题答案7.1 绘出下列离散信号的图形。
(2)2()()k k δε-解:7.5 判断下列信号是否是周期性信号,如果是则其周期为多少? (2)0.4j k e π (3)sin(0.2)cos(0.3)k k ππ+ 解: (2)0.40.4cos(0.4)sin(0.4)cos[0.4()]cos(0.4)0.42515sin(0.4)55j k j k e k j k k T k T n T n n T k e πππππππππ=++=⇒=⇒=⇒==因为当时,同理的周期为。
所以的周期为。
(3)s i n [0.2()]s i n (0.2)0.2210120[0.3]cos(0.3)0.3233sin[0.2()][0.3]20k T k T n T nn k T k T n T n n k T k T ππππππππππ+=⇒=⇒==+=⇒=⇒==+++因为当时,T=10。
cos ()当时,T=20。
所以,cos ()是周期信号,周期为。
7.6一个有限长连续时间信号,时间长度为2分钟,频谱包含有直流至100Hz 分量的连续时间信号。
为便于计算机处理,对其取样以构成离散信号,求最小的理想取样点。
解:min max min100112002002602240001200m s m s s f Hzf sf Hz T s f ===⇒==⨯==min由采样定理可知采样周期最大值所以在分钟内最小的理想采样点数: n7.7设一连续时间信号,其频谱包含有直流、1kHz 、2kHz 、3kHz 四个频率分量,幅度分别为0.5、1、0.5、0.25;相位谱为0,试以10kHz 的采样频率对该信号取样,画出取样后所得离散序列在0到25kHz 频率范围内的频谱。
解:由采样定理可知采样后的频谱为原序列频谱以采样频率为周期进行周期延拓。
故在0~25kHz 范围内有三个周期。
其频谱如下图所示:10.50.257.12一初始状态不为零的离散系统。
当激励为()e k 时全响应为11()[()1]()2k y k k ε=+,当激励为()e k -时全响应为21()[()1]()2k y k k ε=--,求当初始状态增加一倍且激励为4()e k 时的全响应。
解:设初始状态不变,当激励为()e k 时,系统的零输入响应为()zi y k ,零状态响应为()zs y k 。
按题意得到:1111()()()[()1]()(1)2,(),1()()()[()1]()(2)2(1),(2),11()[()()]()2211()[()()1]()22,4(),()k zi zs k zi zs k k zi k k zs y k y k y k k e k y k y k y k k y k k y k k e k y k εεεε+++=+=+-=-=--=--=+-+=根据线性非时变系统的性质当激励为时全响应为联立两式可解得所以当初始状态增加一倍且激励为时112()4()[43()()]()22k k zi zs y k y k k ε+=+--7.13试列出图P7-13所示系统的差分方程。
(a )解:(1)()()y k ay k be k ++=7.22 用图解法求图P7-22所示各时间序列的卷积和的图形,并归纳卷积和的表达式中上下选定的原则。
(a )解:(a ) 图中21120()()*()()()(0)111(1)1110.51.5(2)1110.510.251.75(3)1110.510.2510.1251.875(4)10.510.2510.1250.875(5)10.2510.1250.375(6)10.1250.125(7kj f k f k f k f k j f j f f f f f f f f ===-=⨯==⨯+⨯==⨯+⨯+⨯==⨯+⨯+⨯+⨯==⨯+⨯+⨯==⨯+⨯==⨯=∑)0=(b )解:(b ) 图中21120()()*()()()(1)11112(2)112(3)0(0)1111113(1)111111114(2)111111114(3)1111113(4)11112(5)111(6)0(7)0kj f k f k f k f kj f j f f f f f f f f f f f ===--=⨯+⨯=-=⨯=-==⨯+⨯+⨯==⨯+⨯+⨯+⨯==⨯+⨯+⨯+⨯==⨯+⨯+⨯==⨯+⨯==⨯===∑7.24求下列序列的卷积和。
(2)0.5()*()k k k εε 解:110.50.5()*()2(10.5)()0.5k kk k k k εεε+-==-8.1利用定义式求下列序列的z 变换并标注收敛区。
(1)(){1,1,1,1,1,......}f k =-- (5)()0.5(1)k f k k ε=- (6)()(1)f k k ε=--- 解:(1)由z 变换的定义得:11234221()()1 (1111)kz zF z f k zz z z z z z z z -+∞--------∞-==-+-+-=+=--+>∑收敛区:(5)由z 变换的定义得:11111()()0.5(2)212kkkkk k F z f k zzz z z +∞+∞+∞---∞======>-∑∑∑收敛区: (6)由z 变换的定义得:1()(1)11kk k zF z k zz z zε+∞---∞=-∞-=---=-=<-∑∑收敛区: 8.3利用z 变换的性质求下列序列的z 变换。
(2)()()(8)f k k k εε=-- (5)()cos()()2k f k k πε= 解:(2)88z Z Z Z (1),11z z z z z εεεε---=->-由变换线性性质得z z {(k)-(k-8)}={(k)}-{(k-8)}=z-1z-1 (5)由z 变换线性性质得2222222211{cos()()}{()}{()}{()}22221112212k k j j k k j j k k j j k e e Z k Z k Z e k Z e k z z z z z z e z e πππππππεεεε---+==+=∙+∙=>+--8.7用部分分式展开法及留数法求下列()F z 对应的原右边序列。
(1)210()(1)(1)z F z z z =-+解:(1)部分分式展开法:211112111110()(1)(1)()1055(1)(1)11()[55(1)]()10()(1)(1)0()1,1()110(1)Re [()](1)(1k k k k k k k z z F z z z F z z z z z z z f k k z F z zz z k F z z z z F z z z z z s F z zz z ε+---+-=-=-+==+-+-+=+-=-+≥==-=-+=-+因为则所以留数法:当时,有两个极点。
它的两个极点处的留数如下:在处的留数为11111115(1))()110(1)Re [()]5(1)(1)()Re [()][55(1)]()kz k k k z z k k F z z z z z s F z zz z f k s F z z k ε=--+-==-=-=+==-+==+-∑在处的留数为所以8.9求下列序列的双边z 变换。
(2)1()()()(2)(1)3k k f k k k εε=+--(3)1()()2kf k =解:(2)由双边z 变换的定义得:11011()[()()2(1)]3111(3)()()122131152211(2)(31)111332123k k kkk kk k k n kn n n F z k k z z z z zzz z z z z z z z εε+∞--∞+∞-----==-∞=-∞+∞=--==+--=+=+--−−−→+=+=-----<<∑∑∑∑∑令收敛区: (3)L L 11()()()()(1)221()()Z 212(){()()}122121()(1)Z 212(){()(1)}z 22z 1231()()()3(2)(21)2k k k k R k k R f k k k k z zF z Z k z z k zzF z Z k zF z F z F z z z z εεεεεε---=+--===----=--==---=+=<<--右边序列的变换为左边序列的变换为所以收敛区:228.10 ()273111z 32z ;(3)z 322z F z z z +=-+<<<求的原序列,收敛区分别为:() >;()。
解:将(z F )展开为部分分式:2122()1273(3)()221()13313221z ()13332(1)z 3211()3()()()3321(2)z 221()3(33k k k zz F z z z z z F z z z z z zF z z z k k k k k δεεδε++==-+---=++--=+∙--->+-<--所以由收敛区可知各极点在收敛区内,故对应为右边序列。
所以 f(k) =由收敛区可知各极点在收敛区内,故对应为左边序列。
所以 f(k) =11)()(1)211(3)z 3223,211()3(1)()()332k k k k k k k εδεε-+--<----由收敛区<可知,极点z=在收敛区内,相应的部分分式对应的序列为右边序列;极点z=在收敛区外相应的部分分式对应的序列为左边序列。
所以 f(k) =8.15 用z 变换分析法求解7.18所示系统的系统函数和单位函数响应,并判断系统是否稳定。
解:(3)对差分方程等式两边作z 变换:2122221,2()()0.25()()()11()()()0.25(0.5)(0.5)()(1)0.5(1)4(1)0.5(1)()0.5,z 0.5,k k z Y z zY z Y z E z Y z z H z H z zE z z z z z h k k k k k H z z εε---+=====-+--=--=--=>故系统函数为:对上式作反z 变换得单位函数响应h(k):因为有二阶重极点收敛区包含单位圆,所以系统稳定。
8.16 用z 变换分析法求解7.26所示系统的零输入响应。
21(1)()2()()()()()2()2()()2()()()(),(2)(2)11()1122()2222221(){()}[2(2k ZS ZS ZS ZS k zs zs zY z Y z zE z Y z zH z E z z e k k zE z z Y z z Y z H z E z z z zY z z zY z z z z z z y k Z y z ε-+===+==-==-+=+⇒=∙+∙-+-+==+解对差分方程两边作z 变换:又已知所以故系统零状态响应将进行部分分式展开:所以2)]()k k ε- 1(2)()2()()()1()()2()2()()()(),(2)(2)11()1144()2242421(){()}[2(2)]()4ZS ZS ZS ZS k k zs zs zY z Y z E z Y z H z E z z zE z z Y z zY z H z E z z z zY z z zY z z z z z z y k Z y z k ε-+===+=-==-+-=+⇒=∙-∙-+-+==--解对差分方程两边作z 变换:又已知故系统零状态响应将进行部分分式展开:所以22(3)()3()2()()()1()()32()3()()()(),(1)(2)(3)111()1115204()1235241203()ZS ZS ZS ZS zs z Y z zY z Y z E z Y z H z E z z z zE z z Y z zY z H z E z z z z z Y z z z zY z z z z z z z z y k Z ++===++=-==++--=++⇒=∙-∙+++-++-=解对差分方程两边作z 变换:又已知故系统零状态响应将进行部分分式展开:所以1111{()}(2)()(1)()3()54201[4(2)5(1)3]()20k k k zs k k ky z k k k k εεεε-=---+=---+ 2212221111(4)()2()2()()2()()+2()()221()222()()()(22)2222(1)(1)22()(1)(1)(){(ZS z Y z zY z Y z zE z E z Y z z H z E z z z E z zz z z Y z H z E z z z z z z z z z z j j Y z z j z j y k Z Y --++=+==++=+++===++++++-+=+--+---=解对差分方程两边作z 变换:又已知故系统零状态响应,先将反变换:所以11111111)}(1)(1)(1)(1)221[(1)(1)](1)2(cos (1)4(1)(){()}(cos (2)4k k k k k k zs j jz j k j k j j k k k z k y k Z z Y z k εεεπεπε------+=-+-+---=--++---=---==--根据变换的移序性有8.22求图P8-22所示系统的系统函数并粗略绘其频响。