《信号与线性系统》试题与答案
信号与线性系统一二章自测题及参考答案

第一、二章自测题1、判断题(1)若x (t )是一连续时间周期信号,则y (t )=x (2t )也是周期信号。
(2)两个周期信号之和一定是周期信号。
(3)所有非周期信号都是能量信号。
(4)两个连续线性时不变系统相互串联的结果仍然是线性时不变系统。
(5)若)()()(t h t x t y *=,则)1()2()1(+*-=-t h t x t y 。
(6)一个系统的自由响应就等于它的零输入响应。
(7)一个系统的零状态响应就等于它的自由响应。
(8)零状态响应是指系统没有激励时的响应。
(9)系统的单位冲激响应是指系统在冲激信号作用下的全响应。
(10)两个功率信号之和必为功率信号。
2、判断下列信号是能量信号还是功率信号? (1)3cos(15)0()0t t f t t π≥⎧=⎨<⎩ (2)50()0te tf t t -⎧≥=⎨<⎩(3)()6sin 23cos3f t t t =+ (4)|2|()20sin 2t f t e t -=3、填空题(1)已知)()4()(2t t t f ε+=,则)(''t f =__________________。
(2)=+-⋅+⎰∞∞-dt t t t )1()2(2δ__________________________。
(3)=-⎰∞∞-dt t )(92δ_________________________ 。
(4)=-⎰∞∞-dt t t e t j )(0δω_________________________ 。
(5)信号cos(15)cos(30)t t -的周期为 。
4、试画出下列各函数的波形图 (1)0 ),()(001>-=t t t t f ε (2))]4()([3cos )(2--=t t t t f εεπ (3)][sin )(3t t f πε=5、已知f (t )的波形如图1.1所示,求f (2-t )与f (6-2t )的表达式,并画出波形图。
专升本《信号与线性系统》-试卷-答案
专升本《信号与线性系统》一、(共60题,共156分)1. 能量有限信号是指总能量为有限值而平均功率为____的信号。
(2分).标准答案:1. 零;2. 系统响应中随时间增长而趋于稳定的部分称为________________分量。
(2分).标准答案:1. 稳态响应;3. 单位函数响应h(k)是指离散时间系统对____________________________________________的零状态响应。
(2分).标准答案:1. 单位函数(或δ(k));4. 若周期函数f (t)满足,则称其为________函数。
(2分).标准答案:1. 奇谐;5. h(t)是连续因果LTI系统的冲激响应,则系统稳定的充要条件是________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ____________________。
(2分).标准答案:1. ;6. ____。
(2分).标准答案:1. 0;7. 时间函数中变化较____的信号必定具有较宽的频带。
(2分).标准答案:1. 快;8. 信号的最小抽样频率为________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ____________________ Hz。
信号与线性系统_习题答案(有错版)

2.1 (1) 已知连续时间信号 x(t ) 如图 P2.1(a)所示。试画出下列各信号的波形图,并加以标 注。 (a) x(t − 2) (b) x(1 − t ) (c) x(2t + 2) (2) 根据图 P2.1(b)所示的信号 h(t ) ,试画出下列各信号的波形图,并加以标注。 (a) h(t + 3) (b) h( − 2) (c) h(1 − 2t ) (3) 根据图 P2.1(a)和(b)所示的 x(t ) 和 h(t ) ,画出下列各信号的波形图,并加以标注。 (a) x(t )h(−t ) (b) x(1 − t )h(t − 1) (c) x(2 − ) h(t + 4)
其基波周期 T0 是 T1 , T2 的最小公倍数。 (b) x(n) 和 y ( n) 是周期的, x(n + = N1 ) x(n), y (n + N = y ( n) 2) 令 f= (n) x(n) + y (n) ,欲使 f (n) 是周期的,必须有
= N 0 kN = mN 2 1
πn
4
,对所有 n ,
7
1 n , n奇 显然 x(n) 是非周期的,但 y1 (n) 是周期的。 h(n) = 3 0, n偶
(c) 正确。若 x(n) 的周期为 N ,则 y2 (n) 的周期为 2 N 。 (d) 正确。若 y2 (n) 的周期为 N ,则 N 只能是偶数。 x(n) 的周期为 N / 2 。 2.7 判断下列各信号是否是周期信号,如果是周期信号,求出它的基波周期。 (a) = x(t ) 2 cos(3t + π / 4) (c) x(t ) = e (e) = x ( n)
1
信号与线性系统-白恩健书答案

第1章基本概念K第1章习题k1.1解:(1)x(t)为周期信号,周期为T=10。
(2)x(t)为非周期信号。
(3)x[n]为非周期信号。
(4)x[n]为周期信号,周期为N=2。
(5)x(t)为非周期信号。
(6)x[n]为周期信号,周期为N=2。
1.2解:(1)x(t)为功率信号。
(2)x(t)既不是能量信号也不是功率信号。
(3)x[n]为能量信号。
(4)x(t)为能量信号。
(5)x(t)为能量信号。
(6)x[n]为能量信号。
1.3略。
1.4略。
1.5(原题有误)一个离散时间系统的激励与响应的关系为y[n]=M∑i=0b i x[n−i]。
用算符S−k代表将信号x[n]平移k个单位时间得到输出信号x[n−k]的系统,即x[n−k]=S−k(x[n])。
写出联系y[n]与x[n]的系统算符T及其可逆系统的算符T inv。
解:提示:可逆系统为y[n]−M∑i=1b i x[n−i]=b0x[n]。
1.6解:(1)因果、无记忆、非线性、时不变、BIBO稳定系统。
(2)因果、无记忆、线性、时变和BIBO稳定系统。
(3)因果、无记忆、线性、时变和非稳定系统。
(4)因果、记忆、线性、时不变和BIBO稳定系统。
(5)因果、无记忆、线性、时变和BIBO稳定系统。
(6)因果、记忆、时不变、非稳定系统。
–2/48–第1章基本概念(7)因果、无记忆、线性、时不变和BIBO稳定系统。
(8)非因果系统、无记忆、线性、时不变、BIBO稳定系统。
1.7证明略。
1.8解:(1)x[n]的响应为{1,1,−1,2,n=0,1,2,3}。
(2)x[n]的响应为{1,1,−3,1,3,−5,2,n=−3∼3}。
(3)x[n]的响应为{1,0,−1,4,−3,2,n=−2∼3}。
1.9证明提示:根据微积分的极限定义证明。
1.10解:(1)x(t)的响应为4(1−e−t)u(t)−6(1−e−t+1)u(t−1)。
(2)x(t)的响应为[2(t+e−t)−2]u(t)。
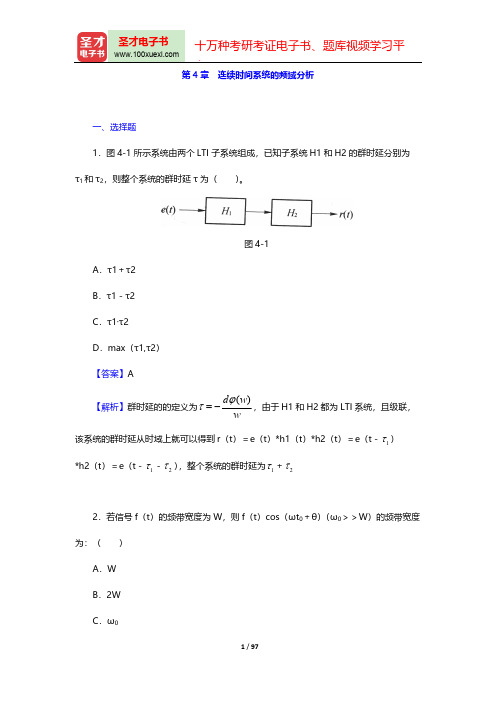
管致中《信号与线性系统》(第5版)(章节题库 连续时间系统的频域分析)
)。(填“因果”或“非因果”)
【答案】时变、因果
【解析】根据时不变的定义,当输入为 x(t-t0)时,输出也应该为 y(t-t0)=
(
t
t0
5
) cos(
x(
t
1
பைடு நூலகம்t0
)
)
但当输入
x(t-t0)时实际的输出为 (
t
5
) cos(
x(
t
1
t0
)
)
,
与要求的输出不相等,所以系统是时变的,因果性的定义是指系统在 t0 时刻的响应只与
【解析】无失真传输的定义:无失真是指响应信号与激励信号相比,只是大小与出现
的时间不同,而无波形上的变化。
3.若某系统对激励 e(t)=E1sin(ω1t)+E2sin(2ω1t)的响应为 r(t)
=KE1sin(ω1t-φ1)+KE2sin(2ω1t-2φ1),响应信号是否发生了失真?(
)(失真
或不失真)
A.W B.2W C.ω0
1 / 97
圣才电子书
D.ω0-W
十万种考研考证电子书、题库视频学习平 台
【答案】B
【解析】f(t)乘上 cos(ωt0+θ)实际上就是对信号进行调制,将原信号的频谱搬
移到- 0 和 0 的位置,由于 ω0>>W,所以频谱无重叠,则频谱宽度为原来的 2 倍
答:因为
Sa
0t
0
G20
,所以
故 故得
4.图 4-3(a)所示系统,已知输入信号 f(t)的 F(jω)=G4(ω),子系统函数 。求系统的零状态响应 y(t)。
图 4-3 答:F(jω)的图形如图 4-3(b)所示。
信号与线性系统-8

信号与线性系统-8(总分:100.00,做题时间:90分钟)一、计算题(总题数:22,分数:100.00)绘出下列离散信号的图形。
(分数:8.00)2.00)__________________________________________________________________________________________ 正确答案:()解析:解是一个公比为的等比序列,且该序列起始于k=0。
其图形如图(a)所示。
(2).2δ(k)-ε(k)(分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:解此序列也是起始于k=0的,其图形如图(b)所示。
2.00)__________________________________________________________________________________________ 正确答案:()解析:解此序列可看做是对连续时间信号(1+sin(2πt))ε(t)以每周期取16个样本点而得到的,故其图形如图(c)所示。
(4).k(2) -kε(k)(分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:解此序列起始于k=1,其图形如图(d)所示。
绘出下列离散信号的图形。
(分数:8.00)(1).k[ε(k+4)-ε(k-4)](分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:解因故此信号的图形如图(a)所示。
管致中《信号与线性系统》(第5版)(章节题库 绪 论)
2 / 23
圣才电子书
三、分析计算题
十万种考研考证电子书、题库视频学习平 台
1.已知两信号分别为 f1(t)=2cos(πt)+4sin(3t),f2(t)
2.系统 y(t)=2(t+1)x(t)+cos(t+1)是_____。(说明因果/非因果性、时 变/非时变性、线性/非线性)。
【答案】因果、时变、非线性。 【解析】y(t)=2(t+1)x(t)+cos(t+1),输出仅与现在的输入有关,系统是 因果的;响应随激励加入的时间不同而发生变换,系统是时变的;不满足齐次性和叠加性, 系统是非线性的。
图 1-4 答:(1)移位:f(-2t+1)= f[-2(t-1/2)],f(-2t+1)波形向左平移 1/2 可得 f(-2t); (2)扩展:将 f(-2t)做尺度变换,横坐标放大 2 倍,求得 f(-t); (3)反转:将 f(-t)反转,求得 f(t)波形,如图 1-5 所示。
4 / 23
圣才电子书
圣才电子书
十万种考研考证电子书、题库视频学习平 台
图 1-2 答:翻转:先将 f(t)的图形翻转,成为 f(-t); 移位:再将图形向右平移 2,成为 f(-t+2);
扩展:然后波形扩展为原来的 3 倍,成为
,如图 1-3 所示。
图 1-3 4.已知 f(-2t+1)波形如图 1-4 所示,试画出 f(t)的波形。
圣才电子书
十万种考研考证电子书、题库视频学习平 台
第 1 章 绪 论
一、填空题 1.系统的输入为 x(r),输出为 y(r)=tx(t),判断系统是否是线性的( )。 【答案】线性的
《信号与线性系统》试题与答案1
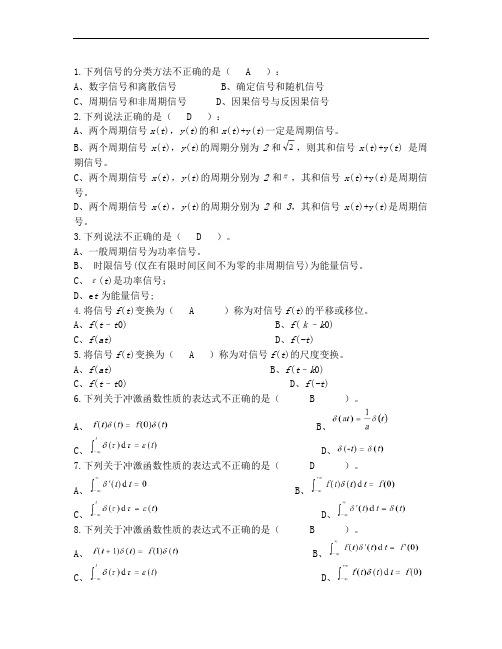
1.下列信号的分类方法不正确的是( A ):A、数字信号和离散信号B、确定信号和随机信号C、周期信号和非周期信号D、因果信号与反因果信号2.下列说法正确的是( D ):A、两个周期信号x(t),y(t)的和x(t)+y(t)一定是周期信号。
B、两个周期信号x(t),y(t)的周期分别为2和,则其和信号x(t)+y(t) 是周期信号。
C、两个周期信号x(t),y(t)的周期分别为2和,其和信号x(t)+y(t)是周期信号。
D、两个周期信号x(t),y(t)的周期分别为2和3,其和信号x(t)+y(t)是周期信号。
3.下列说法不正确的是( D )。
A、一般周期信号为功率信号。
B、时限信号(仅在有限时间区间不为零的非周期信号)为能量信号。
C、ε(t)是功率信号;D、e t为能量信号;4.将信号f(t)变换为( A )称为对信号f(t)的平移或移位。
A、f(t–t0)B、f(k–k0)C、f(at)D、f(-t)5.将信号f(t)变换为( A )称为对信号f(t)的尺度变换。
A、f(at)B、f(t–k0)C、f(t–t0)D、f(-t)6.下列关于冲激函数性质的表达式不正确的是( B )。
A、 B、C、 D、7.下列关于冲激函数性质的表达式不正确的是( D )。
A、 B、C、 D、8.下列关于冲激函数性质的表达式不正确的是( B )。
A、 B、C、 D、9.下列基本单元属于数乘器的是( A )。
A、 B、C、 D、10.下列基本单元属于加法器的是( C )。
A、 B、C、 D、11.,属于其零点的是( B )。
A、-1B、-2C、-jD、j12.,属于其极点的是( B )。
A、1B、2C、0D、-213.下列说法不正确的是( D )。
A、H(s)在左半平面的极点所对应的响应函数为衰减的。
即当t→∞时,响应均趋于0。
B、H(s)在虚轴上的一阶极点所对应的响应函数为稳态分量。
C、H(s)在虚轴上的高阶极点或右半平面上的极点,其所对应的响应函数都是递增的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.下列信号的分类方法不正确的是( A ):A 、数字信号和离散信号B 、确定信号和随机信号C 、周期信号和非周期信号D 、因果信号与反因果信号2.下列说法正确的是( D ):A 、两个周期信号x (t ),y (t )的和x (t )+y(t )一定是周期信号。
B 、两个周期信号x (t ),y (t )的周期分别为2和2,则其和信号x (t )+y(t ) 是周期信号。
C 、两个周期信号x (t ),y (t )的周期分别为2和π,其和信号x (t )+y(t )是周期信号。
D 、两个周期信号x (t ),y (t )的周期分别为2和3,其和信号x (t )+y(t )是周期信号。
3.下列说法不正确的是( D )。
A 、一般周期信号为功率信号。
B 、 时限信号(仅在有限时间区间不为零的非周期信号)为能量信号。
C 、ε(t )是功率信号;D 、e t 为能量信号;4.将信号f (t )变换为( A )称为对信号f (t )的平移或移位。
A 、f (t –t 0) B 、f (k–k 0) C 、f (at ) D 、f (-t )5.将信号f (t )变换为( A )称为对信号f (t )的尺度变换。
A 、f (at ) B 、f (t –k 0) C 、f (t –t 0) D 、f (-t )6.下列关于冲激函数性质的表达式不正确的是( B )。
A 、)()0()()(t f t t f δδ=B 、()t aat δδ1)(=C 、)(d )(t tεττδ=⎰∞- D 、)()-(t t δδ=7.下列关于冲激函数性质的表达式不正确的是( D )。
A 、⎰∞∞-='0d )(t t δ B 、)0(d )()(f t t t f =⎰+∞∞-δC 、)(d )(t tεττδ=⎰∞- D 、⎰∞∞-=')(d )(t t t δδ8.下列关于冲激函数性质的表达式不正确的是( B )。
A 、)()1()()1(t f t t f δδ=+B 、)0(d )()(f t t t f '='⎰∞∞-δC 、)(d )(t tεττδ=⎰∞- D 、)0(d )()(f t t t f =⎰+∞∞-δ9.下列基本单元属于数乘器的是( A ) 。
A 、B 、C 、D、10.下列基本单元属于加法器的是(C ) 。
A 、B 、C 、D 、11.)1()1()2(2)(22+++=s s s s H ,属于其零点的是( B )。
A 、-1B 、-2C 、-jD 、j12.)2)(1()2(2)(-++=s s s s s H ,属于其极点的是( B )。
A 、1B 、2C 、0D 、-213.下列说法不正确的是( D )。
A 、H (s)在左半平面的极点所对应的响应函数为衰减的。
即当t →∞时,响应均趋于0。
B 、 H (s)在虚轴上的一阶极点所对应的响应函数为稳态分量。
C 、 H (s)在虚轴上的高阶极点或右半平面上的极点,其所对应的响应函数都是递增的。
D 、H (s)的零点在左半平面所对应的响应函数为衰减的。
即当t →∞时,响应均趋于0。
14.下列说法不正确的是( D )。
A 、H(z)在单位圆内的极点所对应的响应序列为衰减的。
即当k →∞时,响应均趋于0。
f (t )?a f (t )f 1(t )t )f (t )?a f (t )f 1(t )t )B、H(z)在单位圆上的一阶极点所对应的响应函数为稳态响应。
C、H(z)在单位圆上的高阶极点或单位圆外的极点,其所对应的响应序列都是递增的。
即当k→∞时,响应均趋于∞。
D、H(z)的零点在单位圆内所对应的响应序列为衰减的。
即当k→∞时,响应均趋于0。
.15.对因果系统,只要判断H(s)的极点,即A(s)=0的根(称为系统特征根)是否都在左半平面上,即可判定系统是否稳定。
下列式中对应的系统可能稳定的是[ B ]A、s3+2008s2-2000s+2007B、s3+2008s2+2007sC、s3-2008s2-2007s-2000D、s3+2008s2+2007s+200016.序列的收敛域描述错误的是( B ):A、对于有限长的序列,其双边z变换在整个平面;B、对因果序列,其z变换的收敛域为某个圆外区域;C、对反因果序列,其z变换的收敛域为某个圆外区域;D、对双边序列,其z变换的收敛域为环状区域。
17.If f1(t) ←→F1(jω),f2(t) ←→F2(jω) Then[ C]A、[a f1(t) + b f2(t) ] ←→[a F1(jω) *b F2(jω) ]B、[a f1(t) + b f2(t) ] ←→[a F1(jω) - b F2(jω) ]C、[a f1(t) + b f2(t) ] ←→[a F1(jω) + b F2(jω) ]D、[a f1(t) + b f2(t) ] ←→[a F1(jω) /b F2(jω) ]2.ε(3-t) ε(t)= (A)A .ε(t)- ε(t-3)B .ε(t)C .ε(t)- ε(3-t)D .ε(3-t)18 .已知f (t) ,为求f (t0-at) 则下列运算正确的是(其中t 0 ,a 为正数)(B)A .f (-at) 左移t 0B .f (-at) 右移C .f (at) 左移t 0D .f (at) 右移19 .某系统的系统函数为H (s ),若同时存在频响函数H (j ω),则该系统必须满足条件(C)A .时不变系统B .因果系统C .稳定系统D .线性系统20.If f (t) ←→F(jω) then[ A]A、F( j t ) ←→2πf (–ω)B、F( j t ) ←→2πf (ω)C、F( j t ) ←→f (ω)D、F( j t ) ←→f (ω)21.If f1(t) ←→F1(jω),f2(t) ←→F2(jω),Then [ A]A、f1(t)*f2(t) ←→F1(jω)F2(jω)B、f1(t)+f2(t) ←→F1(jω)F2(jω)C、f1(t) f2(t) ←→F1(jω)F2(jω)D、f1(t)/f2(t) ←→F1(jω)/F2(jω)22.下列傅里叶变换错误的是[ D]A 、1←→2πδ(ω)B 、e j ω0 t ←→ 2πδ(ω–ω0 )C 、 cos(ω0t) ←→ π[δ(ω–ω0 ) +δ(ω+ω0 )]D 、sin(ω0t)= j π[δ(ω+ω0 ) + δ(ω – ω0 )]23、若f(t) ←→ F(s) , Re[s]>σ0,且有实数a>0 ,则f(at) ←→ [ B ]A 、)(1a s F aB 、)(1a sF a Re[s]>a σ0C 、)(a s FD 、)(1asF a Re[s]>σ024、若f(t) <----->F(s) , Re[s]>σ0, 且有实常数t0>0 ,则[ B ]A 、f(t-t0)ε(t-t0)<----->e -st0F(s)B 、f(t-t0)ε(t-t0)<----->e -st0F(s) , Re[s]>σ0C 、f(t-t0)ε(t-t0)<----->e st0F(s) , Re[s]>σ0D 、f(t-t0)ε(t-t0)<----->e -st0F(s) , Re[s]>025、对因果系统,只要判断H(s)的极点,即A(s)=0的根(称为系统特征根)在平面上的位置,即可判定系统是否稳定。
下列式中对应的系统可能稳定的是[ D ] A 、s 3+4s 2-3s+2 B 、s 3+4s 2+3s C 、s 3-4s 2-3s-2 D 、s 3+4s 2+3s+226.已知 f (t) ,为求 f (3-2t) 则下列运算正确的是( C ) A . f (-2t) 左移 3 B . f (-2t) 右移 C . f (2t) 左移3 D . f (2t) 右移27.某系统的系统函数为 H ( s ),若同时存在频响函数 H ( j ω),则该系统必须满足条件( A )A .时不变系统B .因果系统C .稳定系统D .线性系统28..对因果系统,只要判断H(s)的极点,即A(s)=0的根(称为系统特征根)是否都在左半平面上,即可判定系统是否稳定。
下列式中对应的系统可能稳定的是[ B ] A 、s 3+2008s 2-2000s+2007 B 、s 3+2008s 2+2007s C 、s 3-2008s 2-2007s-2000 D 、s 3+2008s 2+2007s+200029 .ε (6-t) ε (t)= ( A )A .ε (t)- ε (t-6)B .ε (t)C .ε (t)- ε (6-t)D .ε (6-t) 30.If f (t ) ←→F (j ω) then[ A ]A 、F ( j t ) ←→ 2πf (–ω)B 、F ( j t ) ←→ 2πf (ω)C 、F ( j t ) ←→ f (ω)D 、F ( j t ) ←→ f (ω)31.If f 1(t ) ←→F 1(j ω), f 2(t ) ←→F 2(j ω),Then [ A ] A 、 f 1(t )*f 2(t ) ←→F 1(j ω)F 2(j ω) B 、 f 1(t )+f 2(t ) ←→F 1(j ω)F 2(j ω) C 、 f 1(t ) f 2(t ) ←→F 1(j ω)F 2(j ω)D 、 f 1(t )/f 2(t ) ←→F 1(j ω)/F 2(j ω)32.若f(t) ←→ F(s) , Re[s]>σ0,则f(2t) ←→ [ D ]A 、)2(21s F B 、)2(21sF Re[s]>2σ0 C 、)2(s FD 、)2(21sF Re[s]>σ033、下列傅里叶变换错误的是[ B ]A 、1←→2πδ(ω)B 、e j ω0 t ←→ 2πδ(ω–ω0 )C 、 cos(ω0t) ←→ π[δ(ω–ω0 ) +δ(ω+ω0 )]D 、sin(ω0t)= j π[δ(ω+ω0 ) + δ(ω – ω0 )]34、若f(t) <----->F(s) , Re[s]>σ0, 且有实常数t0>0 ,则[ B ] A 、f(t-t0)ε(t-t0)<----->e -st0F(s)B 、f(t-t0)ε(t-t0)<----->e -st0F(s) , Re[s]>σ0C 、f(t-t0)ε(t-t0)<----->e st0F(s) , Re[s]>σ0D 、f(t-t0)ε(t-t0)<----->e -st0F(s) , Re[s]>035、If f 1(t ) ←→F 1(j ω), f 2(t ) ←→F 2(j ω) Then[ D ] A 、[a f 1(t ) + b f 2(t ) ] ←→ [a F 1(j ω) *b F 2(j ω) ] B 、[a f 1(t ) + b f 2(t ) ] ←→ [a F 1(j ω) - b F 2(j ω) ] C 、[a f 1(t ) + b f 2(t ) ] ←→ [a F 1(j ω) + b F 2(j ω) ] D 、[a f 1(t ) + b f 2(t ) ] ←→ [a F 1(j ω) /b F 2(j ω) ]36、函数f(t) 的图像如图所示,f(t)为[ C ]A .偶函数B .奇函数C .奇谐函数D .都不是37、函数f(t) 的图像如图所示,f(t)为[ B ]A .偶函数B .奇函数C .奇谐函数D .都不是38.系统的幅频特性|H(j ω)|和相频特性 如图(a)(b)所示,则下列信号通过 该系统时,不产生失真的是[ D ] (A) f(t) = cos(t) + cos(8t)(a)(b)10-10π5-500ωω|H (j ω)|θ(ω)5-5(B) f(t) = sin(2t) + sin(4t) (C) f(t) = sin(2t) sin(4t) (D) f(t) = cos2(4t)39.系统的幅频特性|H(j ω)|和相频特性 如图(a)(b)所示,则下列信号通过 该系统时,不产生失真的是[ C ] (A) f(t) = cos(2t) + cos(4t) (B) f(t) = sin(2t) + sin(4t) (C) f(t) = sin2(4t)(D) f(t) = cos2(4t)+ sin(2t)2 .计算ε (3-t) ε (t)= ( A ) A .ε (t)- ε (t-3) B .ε (t)C .ε (t)- ε (3-t)D .ε (3-t)3 .已知 f (t ) ,为求 f (t 0-at ) 则下列运算正确的是(其中 t 0 , a 为正数)( B ) A . f (-at ) 左移 t 0 B . f (-at ) 右移 C . f (at ) 左移 t 0D . f (at ) 右移4 .某系统的系统函数为 H ( s ),若同时存在频响函数 H ( j ω),则该系统必须满足条件( C ) A .时不变系统 B .因果系统 C .稳定系统D .线性系统 5 .信号 f(5-3t) 是( D ) A . f(3t) 右移 5B . f(3t) 左移C . f( - 3t) 左移 5D . f( - 3t) 右移6. 题图中 f(t) 是周期为 T 的周期信号, f(t) 的三角函数形式的傅里叶级数系数的特点是 ( )A. 仅有正弦项B. 既有正弦项和余弦项,又有直流项C. 既有正弦项又有余弦项D. 仅有余弦项7. 某系统的微分方程为 y ′ (t)+3y(t)= 2f ′ (t) 则系统的阶跃响应 g(t) 应为 ( ) 。