2第二章水准测量
第二章水准测量
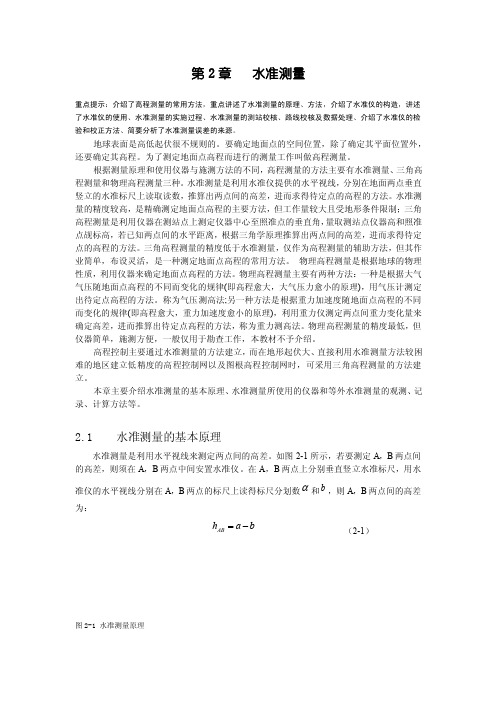
后 下丝 尺 上丝
后视距
号
前 下丝 尺 上丝
前视距
方向及 尺号
水准尺读数 黑面 红面
K+ 黑红
平均 高差 (m)
视距差d
∑d
(1)
(4)
后
(8)
(3)
(10)
(2)
(6)
前
(7)
(14)
(6)
(9)
(15)
(16)
后-前 (11)
(12) (13
(17)
(18)
1 BM1-ZD1
1.426 0.995 43.1 +0.1
第七节 三、四等水准测量
三、四等水准测量主要使用DS3水准仪进 行观测,水准尺采用双面水准尺,观测前必须 对水准仪进行检校。测量时水准尺应安置在尺 垫上扶立铅直。根据双面水准尺的尺常数即 K1=4687和K2=4787,成对使用水准尺。
三、四等水准测量技术要求
等级
标准视线 长度 (m)
前后视 距差 (m)
对于普通水准测量: fh容 40 L 适用于平原区
fh容 12
n 适用于山区
式中,fh容——高差闭合差限差,单位:mm; L——水准路线长度,单位:km ;
n——测站数 。
六、成果处理
普通水准测量的成果处理就是当外业观测的高差 闭合差在容许范围内时,所进行的高差闭合差调整。
1、高差闭合差的计算与检核 2、高差闭合差的调整 高差闭合差调整原则是以水准路线的测段站数或测段长 度成正比,将闭合差反符号分配到各测段上 3、改正后高差的计算 4、高程计算
B点的高程HB就可用下式计算求得:
HB=HA+hAB
hAB = 后视读数–前视读数=a-b
测量学第2章水准仪及水准测量
1、水准测量原理 2、水准测量的仪器及设备 3、水准仪的使用 4、水准测量的一般方法和要求 5、高差闭合差的调整与高程计算 6、水准仪的检验与校正 7、水准测量中产生误差的原因及其消减方法 8、自动安平水准仪 9、电子水准仪的基本原理
a
A
HA
前进方向 HI
水平视线
大地水准面
电子水准仪的使用特点: 读数客观 精度高 速度快 效率高
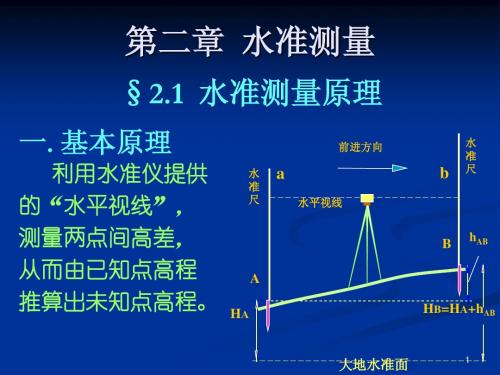
图2-1 水准测量原理
后视点A—后视尺—后视读数a 前视点B—前视尺—前视读数b
b
B
hAB
HB
hAB=a-b
由图2-1可知, HB=HA+hAB=HA+(a-b)
DS3型水准仪 水准尺 尺垫
图2-2 水准仪外型图
1-微倾螺旋; 2-分划板护罩; 3-目镜; 4-物镜对光螺旋; 5-制动螺旋;6-微动螺旋; 7-底版; 8-三角压板; 9-脚螺 旋; 10-弹簧帽; 11-望远镜;12-物镜; 13-管水准器; 14-圆水准器;15-连接小螺丝; 16-轴座
式中:ρ″=206265″
(2-16)
削减方法:每次读数前必须使符合气泡严格居中。
读数误差
原因:①十字丝视差影响, ②估读毫米的误差。
削减方法:为保证读数精度,在观测中除应仔细对 光以消除视差外,还规定普通水准测量,望远镜放 大率不小于20倍,视线长度不超过100米。
扶尺不直的误差
原因:如图所示,由于水准尺未垂直立于地面,无论是前 倾或后仰,其读数都比水准尺扶正时的读数b增大。
HBM2=22.032m,HBM1=19.479m
1
3
BM 1
2
BM 2
图1 附合水准路线
第二章 水准测量
4、 精平 用微倾螺旋 使水准管气泡居中 (符合气泡符合) 5、读数 用十字丝的 横丝在水准尺上读 数(先默估毫米数, 然后米,分米,厘 米数。每次读四位 数,“0”也 是必须 记录的数字。)
14
2.粗平
——目的是使仪器竖轴铅直 用连接螺旋把仪器固定在三脚 架上,固定两个脚架,动第三 个脚架,使三脚架架头大致水 平;转动脚使螺旋圆水准器的气 泡居中
由已知点BM1——已知点BM2
3.支水准路线(spur leveling line)
由已知点BM1——某一待定水准点A。
25
图形:水准路线布设形式
1.闭合水准路线
1
2
3.支水准路线
1
2
BM
3 4
BM
BM2
3
2 1
26
2.附合水准路线 BM1
二、一个测站的水准测量工作
1、安置仪器于AB之间,
立尺于A、B点上; 2、粗略整平; 3、瞄准A尺,精平、读数a, 记录1.568m;
7、水准点:水准测量的固定标志。
8、 水准点高程:指标志点顶面的高程。
水准点
9、转点:水准测量中起传递高程作用的中间点。
返回
28
四、连续水准测量
当两点相距较远或高差较大时,需连续安置水准仪测 定相邻各点间的高差,最后取各个高差的代数和,可得到 起终两点间的高差。
如图:A、B两水准点之间,设3个临时性的转点。 h1 =a1-b1 、 h2 =a2-b2 、 h3 =a3-b3 h4 =a4-b4 、 hAB= h1+h2+h3+h4
第二章 水准测量
§2.1 水准测量原理
一.基本原理
利用水准仪提供 的“水平视线”, 测量两点间高差, 从而由已知点高程 推算出未知点高程。
第2章水准测量

高程是工程测量中三个基本量之一,在实际中具 有重要的意义,如房屋的设计室内地坪测设,所 有构件的安装测设,建筑沉降观测等都是以高程 测量为依据的。 高程测量按使用仪器和施测方法不同可分为水准 测量、三角高程测量,其中水准测量(leveling survey)是最经典的测量方法,精度高、用途广, 是高程测量中普遍采用的方法。
BM2
郑州航院 张先忠
2.5
水准测量的内业
整理野外测量结果,计算高差闭合差,若闭合差在容 许值范围内,则调整闭合差,最后计算各点高程,此项工 作称为水准测量的内业。 平地 fh 2 0 L m m 四等水准测量闭合差容许值
山地
fh
fh fh
6
n
取后视读数a1,估读至mm。
转动望远镜瞄准前视尺,精平后读取中
丝 读 数 b1 , 并 由 记 录 员 立 即 计 算 本 次 高 差
h1=a1-b1。此为第一测站的全部工作。
郑州航院 张先忠
(3) 转站
第一测站施测结束后,记录员招呼后尺手沿水准路
线向前转移,在适当位置设置下一个转点。然后,将水 准仪迁至第二测站位置。 此时,第一测站的前视点成为第二测站的后视点, 重复第一测站上的工作,可以完成第二测站的测量,得 到本站高差h2=a2-b2,此步施测程序称为转站。 重复转站工作,直至完成全部水准路线的观测为止, 并得到各测站高差h3、 h4… hn,则终点高程为:
(a)、闭合水准路线(closed leveling route)
BM1
起止于同一已知水准点的封闭水准路线,称为闭 合水准路线。
郑州航院 张先忠
整个测程从起点回到终点,高差之和必等于零,即 Σh理=0。 由于存在测量误差,一般情况下高差之和Σh测不等 于零,则称为高差闭合差(简称闭合差),记为 fh。
工程测量课件第2章水准测量
十字丝分划板护罩
3. 视准轴平行于水准管轴(i角)的检验与校正
检验:选择在相距80~100米距离两端A、B处钉木桩或放置尺 垫;在距A、B等距离处(S1)安置水准仪。
用双面尺或变动仪高法,测出A、B两点间的平均高差hAB。由 于前后视距相等,高差hAB不存在i角误差。
aa11′△ i
A
S1
D
hAB = a1′-b1 ′
b1′
i△
b1
B
hAB
D
a2′
a2
i
b2
B
hAB
A
S2
水准仪搬至S2处测量A、B两点间的高差hAB ′:
hAB ′=a2 ′-b2 若hAB ′= hAB ,则视准轴平行于水准管轴。否则,计算i角。当 i〃>20″, 则需校正。
h
i
DAB
=206265〃
△h=a2 ′- a2 , a2 = b2 + hAB ;
点O)的纵向切线。当气泡居中时,该轴线处于水平位置。水 准管精度较高,用于精平水准仪。
水准管分划值 :水准管圆弧2mm弧长所对的圆心角。
符合水准器
2
R
调节微倾螺旋
(2)圆水准器
L´
2mm L´
圆水准器轴(L´ L´):通过
圆水准器零点(分划圈中心)的 球面法线。当气泡居中时,该轴
线处于竖直位置。圆水准器精
平地fh容40 L 山地fh容12 n
mm mm
(1)闭合水准路线
1 闭合水准路线
BMA 支水准路线 Ⅰ
•∑h理=0, •fh= ∑h测
Ⅱ
(2)附合水准路线
2
3
•∑h理=HB-HA
• fh= ∑h测-( HB-HA )
园林测量_第二章_水准测量

第二节 水准测量仪器及其使用
• 水准仪按结构可分为:微倾水准仪、自动安平水 准仪、激光水准仪和数字水准仪。 • 水准仪按精度分为:DS05,DS1,DS3,DS10 • D和S分别为“大地测量”和“水准仪”的汉语拼 音的第一个字母;数字表示仪器的精度指标,即 每千米往返测高差平均值的中误差的毫米数。 • 园林测量中一般用DS3和DS10水准仪。 • 本节主要介绍用AL25A型自动安平水准仪配合水 准尺进行水准测量。
第三节 普通水准测量的方法
一、一个测站的水准测量工作 (一)测站水准测量工作 在水准测量中,把安置水准仪的位置称为测站。 1.安置仪器。尽量将仪器安置在两点中间,到两点距离大致相等。 2.粗略整平。 3.瞄准水准尺。 4.读数与记录。 5.高差与高程计算。 【例2-1】假设HA=178.572m,观测得a=1.860m, b=1.413m,求B点的高程HB。 解: hAB=a-b=1.860-1.413=0.447m HB=HA+hAB=178.572+0.447=179.019m
视差
• 当观测者的眼睛在目镜端上下微动时,十字丝与目标影像 有相对移动的现象称为视差。 • 产生的原因:目标的像与十字丝分划板不重合。 • 消除的办法:先把目镜调焦螺旋调好,使十字丝清晰;然 后反复调整物镜对光螺旋。
三、水准仪的使用
(四)精平与读数 • 精平时,转动微倾螺旋,使 符合水准气泡两个半边气泡 吻合在一起。 • 读数时,应读取十字丝横丝 与水准尺相交处的读数,并 从下向上,从小到大读 取,直接读米、分米、 厘米,估读到毫米。
二、复合水准测量
普通水准测量手簿
路线名称:BMA-BMB 仪器型号:DS3 日期:××年××月××月 天气:晴
测站
第2章水准测量
第2章 水准测量重点提示:介绍了高程测量的常用方法,重点讲述了水准测量的原理、方法,介绍了水准仪的构造,讲述了水准仪的使用、水准测量的实施过程、水准测量的测站校核、路线校核及数据处理、介绍了水准仪的检验和校正方法、简要分析了水准测量误差的来源。
地球表面是高低起伏很不规则的。
要确定地面点的空间位置,除了确定其平面位置外,还要确定其高程。
为了测定地面点高程而进行的测量工作叫做高程测量。
根据测量原理和使用仪器与施测方法的不同,高程测量的方法主要有水准测量、三角高程测量和物理高程测量三种。
水准测量是利用水准仪提供的水平视线,分别在地面两点垂直竖立的水准标尺上读取读数,推算出两点间的高差,进而求得待定点的高程的方法。
水准测量的精度较高,是精确测定地面点高程的主要方法,但工作量较大且受地形条件限制;三角高程测量是利用仪器在测站点上测定仪器中心至照准点的垂直角,量取测站点仪器高和照准点觇标高,若已知两点间的水平距离,根据三角学原理推算出两点间的高差,进而求得待定点的高程的方法。
三角高程测量的精度低于水准测量,仅作为高程测量的辅助方法,但其作业简单,布设灵活,是一种测定地面点高程的常用方法。
物理高程测量是根据地球的物理性质,利用仪器来确定地面点高程的方法。
物理高程测量主要有两种方法:一种是根据大气气压随地面点高程的不同而变化的规律(即高程愈大,大气压力愈小的原理),用气压计测定出待定点高程的方法。
称为气压测高法;另一种方法是根据重力加速度随地面点高程的不同而变化的规律(即高程愈大,重力加速度愈小的原理),利用重力仪测定两点间重力变化量来确定高差,进而推算出待定点高程的方法,称为重力测高法。
物理高程测量的精度最低,但仪器简单,施测方便,一般仅用于勘查工作,本教材不予介绍。
高程控制主要通过水准测量的方法建立,而在地形起伏大、直接利用水准测量方法较困难的地区建立低精度的高程控制网以及图根高程控制网时,可采用三角高程测量的方法建立。
测量学-第二章 水准测量

尺垫:半球形顶部用来竖立水准尺,并标志转点 位置。
水准仪的使用
安置——粗平——瞄准——精平——读数
安置:安置三脚架,放置水准仪 粗平:借助圆水准器的气泡居中,使仪器竖轴大致铅垂 ,从而视准轴粗略水平。 瞄准:瞄准水准尺,转动目镜对光螺旋,使十字丝清晰 。 转动物镜对光螺旋进行对光,使目标清晰 精平:调节微倾螺旋,使气泡两端的像吻合,使水准仪 的视准轴精确水平 读数:十字丝的中丝在尺上读数
( a 1.103m, b 1.431m)
计算B点高程
Hi H A a 1.235 m 1.103m 2.338 m H B Hi b 2.338 m 1.431m 0.907 m
2.3 水准测量的仪器及使用
– 水准测量使用的仪器:水准仪 – 水准测量使用的工具包括:水准尺、尺垫、三
-0313 +0102 -0715
4.2 水准路线检核
高差闭合差
对于水准路线,由于测量误差的存在,实测高差之和不 等于理论值(真值),两者之差称作高差闭合差
高差真值之和 h理 H BMB H BMA 实测高差之和 h测 H BMB H BMA
高差闭合差 fh h测 h理
4.2 水准路线检核
脚架
水准仪的类型
– 水准仪按其构造分为:光学水准仪、自动安平水准仪 和数字水准仪
– 水准仪按其所能达到的精度分为:DS05、DS1、DS3 、DS10、DS20等5种等级。
“D”和“S”表示中文“大地”和“水准仪” ,通常在书写时可省 略字母“D”, “05”、“1”、“3”及“10”等数字表示该类仪器的精度。每公里 高差中误差
1.304
BMB
1.134
BMA
1.677 1.444 1.324
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五节 水准测量的误差及注意事项
一、水准测量的误差 (一)仪器工具误差 1.仪器误差 ,在水准测量时,只要将仪器安置在距前、后 视距尺距离相等的位置,就可消除该项误差对高差测量所产生的 影响。 2.水准尺误差 ,事先都必须对所用水准尺逐项进行检定, 符合要求方可使用。 (二)操作误差 1.整平误差:。 2.读数误差: 3.视差误差:在观测前,必须反复调节目镜和物镜对光螺旋, 以消除视差。 (三)外界条件的影响 1.仪器和尺垫下沉 2.水准尺倾斜 3.地球曲率和大气折光 4.温度的变化 5.风力作用
(三)各点高程的计算
根据改正后的高差,由起始点BM1的高程 逐一推算出其他各点的高程,如: H2=H1+h12
H3=H2+h23 H4=H3+h34
……..
如计算无误,则最后推算得的 BM2高程应 与已知高程相等。 闭合水准路线的高程计算与附合水准路线 相同。 支水准路线采用往返测,每一测段的高差 取往返测的平均值,符号与往测符号相同即可。
a1
a2
b1
b2
2.双仪器法:在两测点之间同时安置两台仪器,分别测 得两点的高差进行比较,结果处理方法同上。
3.双面尺法:测时不改变仪器高度,采用双面尺的红、 黑两面两次测量高差,以黑面高差为准,红面高差与 黑面高差比较,若红面高差比黑面高差大,则先将红 面高差减去100mm,再与黑面高差比较,误差在 ±10mm以内取平均值,反之,将红面高差加上 100mm,再与黑面高差比较,误差在±10mm以内取 平均值。
(二)尺垫: 立尺前先将尺垫用脚踩实,然后竖立水准尺于半圆 球体顶上,它的作用在于防止水准尺下沉及尺子转动 时不改变其高程。
`
第三节 水准测量的方法
一、一个测站的水准测量工作
(一)安置仪器 首先在A、B两点上各竖立一根水准尺, 然后尽可能在距两水准尺等远处设置测站。张 开三脚架,使其高度适当,架头大致水平,并 牢固地架设在地面上。从箱中取出仪器牢固地 连接在三脚架上。
第四节 水准测量的校核方法
一、水准测量的精度要求 不同等级的水准测量有不同的精度要求,对于普 通水准测量的规定是:fh允=±12 mm或±40 mm 式中L为水准路线的长度,以km计;n—测站数。 二、水准测量的校核方法 水准测量的校核方法可分为测站校核和路线校核。
(一)测站校核
对每一测站的高差进行校核,称为测站校核,其方法有: 1.双仪高法:在每一测站上测出高差后,在原地改 变仪器的高度,重新安置仪器,再测一次高差。如果 两次测得的高差之差在限差之内,则取其平均数作为 这一测站的高差结果,否则需要重测。在普通水准测 量中,该限差规定为±10mm。
(二)由视线高程计算高程
由图2—1可知,A点高程加后视读数等于仪器 视线的高程,设视线高程为Hi,即Hi=HA+a则B 点高程等于视线高程减去前视读数, 即 HB=Hi-b=(HA+a)-b (2—3)
第二节 三个部分组成。
(一)望远镜
1.望远镜:是用来瞄准远方目标的,主要作用是 使目标成像清晰、扩大视角,以精确照准目标。 2 .构成:物镜、十字丝分划板、调焦镜、目镜 等。 3. 种类:由于物镜调焦构造不同,望远镜有外 对光望远镜和内对光望远镜两种。 4. 成像原理:目标通过物镜及调焦凹透镜的作 用,在十字丝面上形成一个倒立的小实像,再经过目 镜的放大作用,使目标的像和十字丝同时放大成虚像。 介绍仪器:
由上式可以看出,A、B两点的高差等于中间各段高差 的代数和,也等于所有后视读数之和减去所有前视读 数之和,可作为每一页记录手簿的计算校核。这两个 数如果不等,则说明计算有错误,需要重算。
水准测量中的转1、转2、……转n等临时立尺点, 是用来传递高程的,称为转点。在转点上不仅有前视 读数,还有后视读数。一个测站工作结束后,仪器搬 到下一测站,转点的位置丝毫不能动,否则就不能传 递高程,因此,转点上应使用尺垫,以防止尺子下沉 及转动时改变高度。
(三)、瞄准水准尺
1.调节目镜:根据观测者的视力,转动目镜调节螺旋,使十字丝 看得十分清晰。 2.初步瞄准:松开制动螺旋,转动望远镜,利用望远镜上的缺口 和准星,瞄准水准尺,瞄准后拧紧制动螺旋。 3.对光和瞄准:转动物镜对光螺旋,使尺面的像看得十分清楚。 转动望远镜微动螺旋,使十字丝对准尺面中央。
(1)高差闭合差fh的计算公式为:
fh=∑h测-(H终-H始) (2—7) 式中H终、H始—起始和终了水准点的高程。 普通水准测量高差闭合差的允许值为 fh允=±12 mm或±40 mm (2—8) 式中L为水准路线的长度,以km计;n—测站数。 上式中,前者用于山地地区,后者用于平 坦地区。如果高差闭合差超过允许值,即fh> fh允,则测量成果不能应用,必须重测。
(二)水准器
水准仪上的水准器是用来指示视线 是否水平或竖轴是否竖直的。水准 器分圆水准器和长水准器两种。
1.圆水准器一般装在基座上,作粗略整平、 使竖轴竖直之用。 2.长水准管和望远镜连在一起,供精确调平 视线之用。 (三)基座
二、水准尺与尺垫
(一)、水准尺:水准尺按尺面分为单面尺 和双面尺两种;按尺形分为直尺、折尺、 塔尺等三种。 1.直尺: ⑴黑面尺:底端起始数为0 ⑵红面尺:底端起始数为 4687mm 或 4787mm。 直尺必须成对使用。用以检核读数。 2.折尺:单面尺,一般长4m。 3.塔尺:双面尺,一般 3m 或 5m,底 端起始数均为0。
二、水准路线高差闭合差的调整和高程计算
如果水准路线的高差闭合差在允许范围之 内,即可进行闭合差的调整和高程计算。 (一)高差闭合差的计算 应用式(2—7)及式(2—8)得 f2=∑h测-(H终-H始) fh允=±12 mm或±40 mm fh≤fh允,可以调整。
(二)高差闭合差的调整
在同一条水准路线上,认为各测站条件大 致相同,各测站产生的误差是相等的,因此在 调整闭合差时,应将闭合差以相反符号,按测 站数(或距离)成正比例地分配到各测段的实 测高差中,即
HAB= a-b
(2—1)
如果测量是由A→B的方向前进,则A点称为后视点,B点 称为前视点,a及b分别为后视读数和前视读数,两点 间的高差就等于后视读数减去前视读数。如果B点高于 A点,则高差为正,反之,高差为负。
。
二、计算高程的方法
(一)由高差计算高程 B点(未知点)的高程等于A点 (已知点)的高程加上两点间的高差。 即 HB=HA+HAB=HA+(a-b) (2—2)
3.支水准路线
由已知水准点开始,测定1、2、3等点间的高差,没有 条件附合到另一水准点或回到已知水准点,这种路线 叫做支水准路线。
支水准路线必须沿同一路线进行往测和返测,往、 返测的高差绝对值应相等,而符号相反。如不相等, 便产生了闭合差 即 fh= H往+H返 往返测高差闭合差的允许值与附合水准路线相同, 而测站数n或路线长L以单程计。
第二章 水准测量
第一节 水准测量原理
一、水准测量原理
水准测量的原理是借助水准仪提供的水平视线,配合 水准尺测定地面上两点间的高差,然后根据已知点的 高程来推求未知点的高程。 如图 2 — 1 所示,已知 A 点高程为 HA,要测出 B 点高 程 HB, 在 A、B 两点间 安置一架能提供水平视线的仪 器 —水准仪,并在 A、B 两点各竖立水准尺,利用水平 视线分别读出A点尺子上的读数α 及B点尺子上的读数b, 则A、B两点间的高差为
(二)、粗略整平
粗平的工作是通过旋转脚螺旋使圆水准器的气泡 居中。 操作方法如图所示,气泡偏离在 a 位置,先用双 手按箭头所指方向相对地转动脚螺旋 1 和 2 ,使气泡移 到图中( b)所示位置,然后再单独转动脚螺旋3 ,使 气泡居中。
在粗平过程中,气泡移动的方向与左手大拇指转动脚螺旋的方向一致。
a
A
b B A
a
b B
校核:(1) a红-a黑=K, K--常数4.687(4.787)m 要求:(a红-a黑)-K≤4mm (2) h黑=a黑-b黑, h红=a红-b红0.100m 要求: h黑- h红≤10mm
a A
b
a
b B
B
A
(二)水准路线校核
1.附合水准路线 如图2—15所示,欲测定1、 2 、 3 、 4 等点高程,选定水准路线由已知水准 点BM1开始,顺序施测各点高差,最后又由4 点 测到另一已知水准点BM2形成附合水准路线。
二、水准测量注意事项
• • • • • •
1、站居中间 2、标尺扶直 3、气泡居中(视线水平) 4、读数准确 5、记录认真(原始) 6、爱护仪器。
第六节 自动安平水准仪
自动安平水准仪是利用安装在望远镜内 的自动补偿器,自动获得水平视线的一 种水准仪。
第七节 电子水准仪
电子水准仪可被认为是自动安平水准仪、CCD相机、 微处理器和条形码尺组合成的一个几何水准自动测量 系统。另外,仪器光学系统的结构将视准光束的一部 分按一般光路进行,因此,电子水准仪仍可进行与光 学水准仪一样的读数。
4.清除视差:
(四)、精平与读数
望远镜瞄准水准尺后,读数前必须转动微倾螺 旋,使水准管气泡居中,达到视线水平,才能 读数。读数后再检查气泡是否居中,否则应重 新调整,再次读数。应该注意,读完读数后, 仪器转到前视方向,仍要利用微倾螺旋调整水 准管气泡居中,再进行读数。
二、复合水准测量
当地面上两点相距较远或高差较大时,安置一 站仪器难以测得两点的高差,因此,必须依图 2—14所示,在 A、B两点之间增设若干临时立 尺点。把 A、B 分成若干测段,逐段测出高差, 最后由各段高差求和,得出 A、B 两点间高差。
2.闭合水准路线
•
从一个已知水准点BM1开始,测定1、2、3等点的高 差,最后回到BM1点,形成一个闭合水准路线。 由于测量误差的存在,∑h测≠0,则闭合水准路线的高 差闭合差fh为: fh=∑h测 同样,要求fh≤fh允,否则应重测。闭合水准路线的 fh允与附合水准路线相同。