行星齿轮变速箱课程设计
行星齿轮减速器-课程设计计算说明书
⾏星齿轮减速器-课程设计计算说明书⽬录设计任务书: (2)设计内容: (3)⼀、评述传动⽅案 (3)⼆、电动机的选择及动⼒参数计算 (4)三、传动零件的校核计算 (6)⼀)外啮合齿轮传动 (6)⼆)内啮合齿轮传动 (9)四、轴的设计 (11)⼀)减速器输⼊轴Ⅰ (11)⼆)⾏星轮轴Ⅱ (17)三)内齿轮轴Ⅲ (20)五、键连接的选择和计算 (23)六、滚动轴承的选择和计算 (25)七、联轴器的选择 (28)⼋、齿侧间隙 (28)九、轴Ⅱ加⼯⼯艺图 (29)⼗、参考资料 (30)设计任务书:设计内容:⼀、评述传动⽅案牵引速度为 1.5/v m s =,滚筒直径400D mm =,可求出滚筒转速(601000)/w n v =??()(60100 1.5)/(400)71.62/min D r ππ==,由于⼯作情况为:室外,环境有灰尘,最⾼温度40℃,两班制,间歇双向运转,反向空转,断续周期⼯作制(S3),负荷持续率FC=56%,载荷有冲击,故应选YZR 系列电动机为原动机,它的转速约为750~1000r/min ,传动装置速⽐应为/(750~1000)/71.6210.47~13.96m w i n n ===可选如下图1-1、1-2两种⽅案:图1-1⽅案a 采⽤NW 分流式⾏星齿轮传动,卷扬机⼯作时制动器10制动,此时电动机1通过联轴器2驱动⾏星齿轮减速器,⾏星架上的滚筒5使钢丝绳7运动,从⽽牵引重物移动。
不需重物移动时,制动器6制动,制动器10松开,这时⾏星传动变成定轴传动,电动机和⼆级同轴式减速器空转,不⽤频繁地起动和制动电动机。
滚筒⽤滑动轴承⽀撑在机架上。
传动⽐:5~25i =,可满⾜传动要求。
优点:外形尺⼨⼩(减速器内置),电动机不⽤频繁启动适合狭窄⼯况下⼯作。
缺点:结构复杂,加⼯安装精度⾼,成本⼤,不易维修。
图1-2⽅案b 采⽤⼀级带传动和⼀级闭式齿轮传动,电动机带动带传动,齿轮传动,从⽽带动滚筒运动。
二级行星齿轮课程设计

二级行星齿轮课程设计一、课程目标知识目标:1. 学生能理解并掌握二级行星齿轮的基本结构、工作原理及特点。
2. 学生能描述二级行星齿轮传动系统的设计方法及其在工程中的应用。
3. 学生能运用二级行星齿轮的传动比计算公式,进行相关计算。
技能目标:1. 学生具备运用二级行星齿轮进行简单机械设计的实际操作能力。
2. 学生能够分析二级行星齿轮在实际应用中可能出现的故障及其原因。
3. 学生能够运用所学知识,对二级行星齿轮传动系统进行优化设计。
情感态度价值观目标:1. 培养学生对齿轮传动系统的兴趣,激发学生探究机械原理的欲望。
2. 培养学生的团队协作意识,提高学生在实际操作中发现问题、解决问题的能力。
3. 增强学生对我国机械工程领域的自豪感,培养学生为我国机械行业发展贡献力量的使命感。
本课程针对高二年级学生,结合学科特点,注重理论与实践相结合,提高学生的动手操作能力和实际问题解决能力。
通过本课程的学习,使学生能够更好地理解和掌握二级行星齿轮的相关知识,为后续的机械设计课程打下坚实基础。
同时,注重培养学生的情感态度和价值观,激发学生的学习兴趣,提高学生的综合素质。
二、教学内容本章节教学内容主要包括以下几部分:1. 二级齿轮传动系统概述:介绍齿轮传动系统的基本概念、分类及二级行星齿轮传动系统的特点。
2. 二级行星齿轮的结构与原理:详细讲解二级行星齿轮的组成、工作原理及传动比计算。
3. 二级行星齿轮的设计方法:分析二级行星齿轮的设计步骤,包括参数选择、强度计算、校核等。
4. 二级行星齿轮的应用实例:介绍二级行星齿轮在实际工程中的应用案例,如汽车变速箱、风力发电机组等。
5. 二级行星齿轮的故障分析及优化设计:分析二级行星齿轮在实际应用中可能出现的故障及其原因,探讨优化设计方法。
教学内容按照以下进度安排:第一课时:二级齿轮传动系统概述,二级行星齿轮的结构与原理。
第二课时:二级行星齿轮的设计方法。
第三课时:二级行星齿轮的应用实例,故障分析及优化设计。
项目9 行星齿轮变速器结构、原理和

行星齿轮变速器的基本组成 多排行星齿轮机构 换档执行机构
9.1 行星齿轮变速器概述
先观看一段录像。
9.1 行星齿轮变速器概述
单排行星齿轮机构 先观看录像。
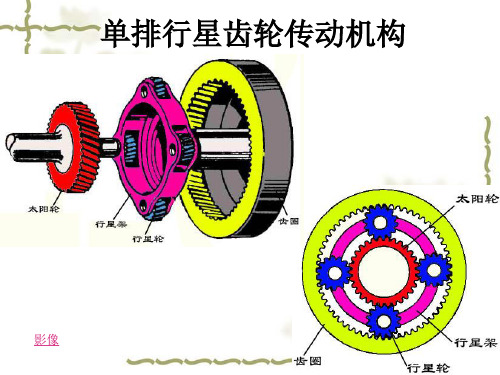
单排行星齿轮机构的结构
行星齿轮变速器概述
单排行星齿轮机构的运动规律 n1+αn2-(1+α)n3=0
其中:n1—太阳轮转速; n2—齿圈转速; n3—行星架转速;
辛普森行星齿轮变速器
D3档:C1、C2
辛普森行星齿轮变速器
21(11)档:C1、B3、F2
22档:C1、B1、B2、F1
辛普森行星齿轮变速器
辛普森行星齿轮变速器
R档:C2、B3
P档:
辛普森行星齿轮变速器
辛普森行星齿轮变速器 二、四档Simpson行星齿轮变速器 以凌志LS400的A341E、A342E为例。 1.结构、组成
离合器重新装配后要检查离合器的间隙。间隙过大会使换档滞后、离合器打滑;间隙过小会使得离合器分离不彻底。
制动器(带式和多片式) 先观看录像。
换档执行机构
结构、组成
ห้องสมุดไป่ตู้
换档执行机构
工作原理
换档执行机构
检查制动带是否破裂、过热、不均匀磨损、表面剥落等情况,如果有任何一种,制动带都应更换。
1
2
制动器装配后要调整工作间隙,原因与离合器间隙的调整是一样的。方法是:将调整螺钉上的锁紧螺母拧松并退回大约五圈,然后用扭力扳手按规定转矩将调整螺钉拧紧,再按维修手册的要求将调整螺钉退回一定圈数,最后用锁紧螺母紧固。
太阳轮制动,行星架主动,齿圈从动,则n1=0,故传动比 i32=n3/n2= α/(1+α)<1 超速档
02
行星齿轮变速器设计说明书

DSZP2HA 行星齿轮变速器设计说明书一、用途:捞渣输送机主传动装置是用于2X330MW电力机组除渣设备主传动设备,该设备集机电液为一体,传动设备的主要功能是通过传动装置带动链条,链条带动刮板,当接渣斗装满后,传动装置启动,托出刮板,带出煤渣,并运到高处,把煤渣倾倒出去。
二、设计输入参数:1.工作扭矩:14000Nm;2.最大扭矩:55000Nm;3.转速范围:0.2-2.5rpm;4.减速机速比:37.92:1;三、方案设计一)传动型式选择:按最大扭矩55000Nm,总传动比37.92,选用两级NGW行星齿轮减速机。
两级行星轮个数均选n p=3,高速级采用行星架浮动而太阳轮和内齿轮固定的结构;低速级采用太阳轮浮动的结构。
二)材料、性能选者、热处理及齿形要求1.材料:a 太阳轮和行星轮的材料为20CrNi2MoA,渗碳淬火处理,表面硬度57+4HRC,齿面接触疲劳极限:σHlim=1450N/mm2 ,齿根弯曲疲劳极限:太阳轮σFlim=400N/mm2 ,行星轮σFlim=280N/mm2 ,b 内齿轮的材料为42CrMo,调质处理,硬度为HB262~293,齿面接触疲劳极限σHlim=750N/mm2 ,齿根弯曲疲劳极限σFlim=255N/mm2 ,2.齿形齿形为渐开线直齿,外啮合最终加工为磨齿,6级精度;内啮合最终加工为插齿,7级精度。
为提高齿轮承载能力,两极均采用变位齿轮传动。
三).传动比的分配按高速级(I )和低速级(II )齿面接触等强度的原则进行传动比的分配。
取系数λ=1.2(低速级内齿轮分度圆直径2d 与高速级内齿轮分度圆直径2d 之比,一般λ=1~1.3),齿宽系数φaI =0.4, φaII =0.7,σHlimI=σHlimII ,其余见下表 代 号名 称 说 明 取 值 K A使用系数 按中等冲击 1.5 K HPI1.1 K HPII行星轮间载荷分配系数 按《齿轮手册》表7.3-7 1.05 K H ∑IK H ∑II 综合系数 按《齿轮手册》表7.3-4 1.8由《齿轮手册》可知,q 值为834.113508.105.14.0313508.11.17.03)()(22lim 2lim 2==•∑••••∑•••=x x x x x x x x K K n K K n q I H II H HPII aI d PI II H I HHPI aII d PII σφσφ 17.32.1834.133==X q λ由此查《齿轮手册》图7.2-9,得P I =5.75 ,则75.675.51111=+=+=P i58.575.6/68.37/1===i i i II四)、配齿计算a 高速级太阳轮齿数Za2075.6453===X i C n Z I P a 取C=45(整数) 内齿圈齿数Zb115)175.6(20)1(=−=−•=X i Za Zb I行星轮齿数Zc5.47)20115(5.0)(5.0'=−=−=X Z Z X Z a b C取Zc=47整数,满足装配条件45311520=+=+=p b a n z z M b 同理可求出低速级齿数913520===b c a z z z ,,整数,满足装配条件3739120=+=+=p b a n z z M c 按齿面接触强度,计算太阳轮分度圆直径高速级太阳轮传递扭矩为:T=55000/37.68=1560N 。
行星齿轮变速器设计

行星齿轮变速器设计行星齿轮机构、换挡执行机构1、结构和类型结构:太阳轮、齿圈、行星架和若干行星齿轮类型:1)按齿轮的啮合方式内啮合式、外啮合式2)按行星齿轮的排数单排、多排3)按照太阳轮和齿圈之间的行星齿轮组数单行星齿轮式、双行星齿轮式2、行星齿轮机构变速原理运动方程式:0)1(321=+-+n n n αα1n :太阳轮转速;2n :齿圈转速;3n :行星架转速;1Z :太阳轮齿数;2Z :齿圈齿数;(3Z =1Z +2Z )目前车辆中三自由度行星变速器主要有4类,即辛普森式、拉维娜式、CR-CR 式及Willson 式。
(一)辛普森结构这是以发明者Simpson 工程师命名的结构,如图1所示,其结构特点是由两个完全相同此轮参数的行星排组成。
优点:齿轮种类少、加工量小、工艺性好、成本低;以齿圈输入、输出,强度高,传递功率大;无功率循环,效率高;组成的元件转速低,换挡平稳;虽然是三自由度的变速器, 每次换挡需操纵两个执行机构,但因安排合理,实际仅需更换一个执行机构(图1表)。
我国的774CA (图1b )、通用公司的C THM 125、日产B N 713均是这种机构。
以国产774CA 为例,求各挡的传动比: 其686221====s R z z ααα;输入转速i n ,输出转速o n ;求i i :第一排:1S n +1R n α1)1(C n α+-=0第二排:0)1(222=+-+C R S n n n αα从辅助构件知:1S n =2S n ,o R C n n n ==22;从执行机构知:0,21==C R i n n n ,连解并消去s n ,则:45.211=++==αααo i n n i同理可解出:45.12=i1C 与2C 均接合,使13=i ,则从表中可以看出:1. 此变速器倒档通过2C 换联了主动件,故属于换联主动件的三自由度;2.虽为三自由度,但实际每一次换挡,仅操纵一个执行机构;图1 2挡与3挡的Simpson 结构为了进一步提高换挡品质,上图(c )由2挡换3挡时,释放制动器1B 与结合离合器1C 的交换应及时,否则1C 结合过早,使各元件间会产生运动干涉;1B 释放太快,则使发动机出现空转、轰响,且使换挡冲击增加。
自动变速器电子教案10单排行星齿轮机构原理
但由于行星架为输出且与车身相连,阻力较大不能转 动,因此,全部转矩加在齿圈上,使齿圈逆时针空转,不可 能有转矩从齿轮架输出。
行星齿轮机构在此状态下处于空档状态 。
4)行星齿轮传递的动力被分配到数 量众多的啮合齿上。与手控变速器 相比结构更为小型、紧凑。
4、传动比计算:
1)行星架等效齿数: Z圈——内齿圈齿数 Z太——太阳轮齿数 Z行架——行星架架齿数
行星小齿轮在传动过程始终用作中间齿轮,它们的齿数与 行星齿轮机构的传动比无关,行星齿轮机构的传动比只取决 于齿轮架、内齿圈和太阳轮的齿数,齿轮架并非齿轮因此没 有实际齿,在计算传动比时对行星齿轮架指定一个想像的齿
4)同向、增速(前进档的超速档状态):
①同向增速状态a 固定——内齿圈 主动——行星架 从动——太阳轮
内齿圈被固定后,当齿轮架顺时针方向旋转输入时,迫使 小齿轮在内齿圈内按顺时针方向公转,同时又绕小齿轮轴反时 针方向自转,使太阳轮必定按顺时针方向旋转输出。
传动比 i=从动齿齿数/主动齿齿数 = Z太/ Z行架
单排行星齿轮传动机构
影像
1、三基本元件:
太阳轮
组
成
一
齿圈
个 行
星
行星轮和行星轮架
排
2、各部件相互关系:
太阳轮:
是一个具有外部齿的齿轮,可以绕自身轴线旋转,同行星齿 轮外啮合。
齿圈:
是一个具有内齿的齿圈,可以绕自身轴线旋转,同行星齿轮 内啮合。
行星轮和行星轮架:
行星轮通过轴安装在行星轮架上,在轴上能绕固定轴转动, 即自转,还可以同行星轮架一起绕太阳轮转动,即,公转; 行星轮的内端同太阳轮外啮合,外端同齿圈内啮合。
行星齿轮传动课程设计
目录一.绪论 (2)1.引言 (2)2.行星齿轮传动的特点及国内外研究现状 (3)(1)行星齿轮传动的特点及应用 (3)(2)国内外的研究状况及其发展方向 (4)3.本文的主要内容 (6)二.机构简图的确定 (6)三.齿形与精度 (7)四.齿轮材料及其性能 (7)五.设计计算 (8)1.配齿数 (8)2.初步计算齿轮主要参数 (9)(1)按齿面接触强度计算太阳轮分度圆直径 (9)(2)按弯曲强度初算模数 (10)3.几何尺寸计算 (11)4.重合度计算 (12)5.啮合效率计算 (13)六.行星轮的强度计算 (14)七.疲劳强度校核 (18)1.外啮合 (18)(1)齿面接触疲劳强度 (18)(2)齿根弯曲疲劳强度 (21)2.内啮合 (24)八.安全系数校核 (25)九.零件图及装配图 (28)十.参考文献 (29)一.绪论1.引言渐开线行星齿轮减速器是一种至少有一个齿轮绕着位置固定的几何轴线作圆周运动的齿轮传动,这种传动通常用内啮合且多采用几个行星轮同时传递载荷,以使功率分流。
渐开线行星齿轮传动具有以下优点:传动比范围大、结构紧凑、体积和质量小、效率普遍较高、噪音低以及运转平稳等,因此被广泛应用于起重、冶金、工程机械、运输、航空、机床、电工机械以及国防工业等部门作为减速、变速或增速齿轮传动装置。
渐开线行星齿轮减速器所用的行星齿轮传动类型很多,按传动机构中齿轮的啮合方式分为:NGW、NW、NN、NGWN、ZU飞VGW、W.W等,其中的字母表示:N—内啮合,W—外啮合,G—内外啮合公用行星齿轮,ZU—锥齿轮。
NGW型行星齿轮传动机构的主要特点有:1、重量轻、体积小。
在相同条件下比硬齿面渐开线圆柱齿轮减速机重量减速轻1/2以上,体积缩小1/2—1/3;2、传动效率高;3、传动功率范围大,可由小于1千瓦到上万千瓦,且功率越大优点越突出,经济效益越高;4、装配型式多样,适用性广,运转平稳,噪音小;5、外齿轮为6级精度,内齿轮为7级精度,使用寿命一般均在十年以上。
齿轮变速箱课程设计
齿轮变速箱课程设计一、课程目标知识目标:1. 学生能理解齿轮变速箱的基本结构、工作原理及其在机械设备中的应用;2. 学生能掌握齿轮变速箱的传动比计算方法,了解不同齿轮组合对传动性能的影响;3. 学生了解齿轮变速箱的优缺点,以及在实际应用中的注意事项。
技能目标:1. 学生能通过实际操作,熟练组装和拆卸齿轮变速箱,掌握齿轮变速箱的维护与保养方法;2. 学生能运用所学知识,解决齿轮变速箱在实际应用中出现的问题;3. 学生能运用计算工具,完成齿轮变速箱传动比的计算。
情感态度价值观目标:1. 学生通过学习齿轮变速箱,培养对机械设备的兴趣,增强探究精神和动手能力;2. 学生在小组合作中,学会相互协作、沟通与交流,提高团队意识和解决问题的能力;3. 学生了解齿轮变速箱在工业发展和国防建设中的重要作用,增强爱国主义情怀和社会责任感。
本课程针对八年级学生,结合学生年龄特点,注重培养实践操作能力和团队合作精神。
课程设计紧密联系教材内容,以实用性为导向,通过理论教学与实践操作相结合,使学生在掌握知识的同时,提高技能和情感态度价值观。
课程目标的设定,旨在让学生在学习过程中明确学习方向,为后续教学设计和评估提供依据。
二、教学内容1. 齿轮变速箱的基本概念:介绍齿轮变速箱的定义、分类及其在机械设备中的应用。
- 教材章节:第二章第四节《齿轮传动装置》- 内容:齿轮变速箱的结构、工作原理、类型及特点。
2. 齿轮变速箱的传动比计算:讲解齿轮变速箱的传动比计算方法,分析不同齿轮组合对传动性能的影响。
- 教材章节:第二章第五节《齿轮传动比的计算》- 内容:传动比的定义、计算公式、齿轮组合对传动比的影响。
3. 齿轮变速箱的组装与拆卸:指导学生进行齿轮变速箱的组装和拆卸,掌握维护与保养方法。
- 教材章节:第二章第六节《齿轮变速箱的安装与维护》- 内容:组装和拆卸方法、注意事项、维护保养技巧。
4. 齿轮变速箱在实际应用中的问题及解决方法:分析齿轮变速箱在实际应用中可能遇到的问题,探讨解决方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《工程机械底盘设计》课程设计行星齿轮式变速箱传动方案设计任务书2006级工程机械专业设计起止时间:2009年12月24日~2010年1月4日指导教师:侯红娟一.设计任务综合法设计行星齿轮式变速箱传动方案二.设计内容1.行星齿轮式变速箱传动方案设计;2.齿轮传动设计;3.绘制综合速度平面图,并分析构件的转速和转矩,确定换挡离合器的安装位置。
三.设计参数四.设计要求1.《工程机械底盘设计课程设计计算说明书》须打印或用学校统一印制的课程设计专用稿纸抄写;设计计算说明书要求层次分明,字迹工整,语句通顺,公式运用恰当,计算结果准确,传动方案实用。
2.综合速度平面图要求用AutoCAD绘制或用坐标纸绘制。
3.计算过程不能省略,计算过程中的小数点后面保留两位。
4.按时独立完成设计任务,严禁相互抄袭。
5.在完成课程设计期间,必须遵守学院的各项规章制度。
五.设计进度第一周完成"设计内容"中的第1、2项,第二周完成"设计内容"中的第三项和整理《设计计算说明书》。
六.设计成果《工程机械底盘设计课程设计计算说明书》一份。
《工程机械底盘设计课程设计计算说明书》装订顺序:封面—任务书—目录—说明书—封底。
目录一、综合法设计行星齿轮式变速箱传动方案 (3)1、已知条件 (3)2、根据不等于1的传动比数目计算可列出的方程式数 (3)3、根据方程式数计算方程组数(传动方案数) (3)4、计算旋转构件数 (3)5、给旋转构件命名 (3)6、用构件名称组合方程式 (3)7、绘制变速箱传动示意图 (5)8、绘制传动简图、计算循环功率 (9)二、齿轮传动设计 (12)1、齿轮模数和齿圈分度圆直径确定 (12)2、齿圈和太阳轮齿数计算 (12)3、齿轮传动安装条件校核 (12)三、绘制综合转速平面图,分析构件的转速并确定换档离合器位置 (14)1、已知条件 (14)2、构件转速平面图绘制 (14)3、构件转速分析 (17)4、换档离合器的位置确定 (18)四、参考资料 (18)行星齿轮式变速箱传动方案设计说明书一.综合法设计行星齿轮式变速箱传动方案1.已知条件2.根据不等于1的传动比数目计算可列出的方程数计算公式:32+n C =323+C =35C =103.传动方案数根据方程数计算方程组数(传动方案数)计算公式:n C n C 32=310C =120 4.计算旋转构件数计算公式:m=n+2=3+2=5式中:n 不等于1的传动比数;5.给旋转构件命名输入构件用符号"i "表示,输出构件用符号"o "表示,其它旋转构件用传动比的下脚标表示。
6.列方程(1).列原始方程式按已知的n=3个非直接档传动比值,根据特性方程式写出下列三个原始方程式:(2).列派生方程式现已知n=3,根据已经求得的需要的方程数C=10,尚需写出7个派生运动方程,派生方程应写成最简单的形式;即方程中的转速系数绝对值应小于1,其余的系数按东西大小次序排列。
现将新的运动方程组(含原始运动方程式和派生运动方程式)列表如下其中α为特性系数,第(1) (2) (3)方程为原始方程,第(4)至(10)为派生方程。
方程式(2)、(5)、(10)的α值均太小,(9) 的α值均太大,故在行星变速传动的传动方案中不宜选用这些方程式(行星排)。
而方程式(1)、(3)、(4)、(6)、(7)、(8)代表的行星排是较适宜选用的。
可从这6个方程中选择n=3个方程式的不同组合;即可得不同的传动方案。
根据选择n个方程式的一般原则:①每个方程组中都必须含有所有的旋转构件"i、o、1、2、R"。
②所选的n个方程的特性系数α应相互接近,且便于计算。
③所选择的n个方程式都应该是独立的;其中任一个方程式不应是同一组合中的另两个方程式导出的④n个方程式中,所选特性系数α的范围为<α<。
根据上述原则可在上表中选取(1)、(3)、(4)、(6)、(7)、(8)方程式组合成方程组。
7.绘制变速箱传动示意图㈠134136㈡㈣138㈥347㈧467㈩461(十二)671(十四)674(十六)783(十八)143(二十)148方案Ⅰ方案Ⅱ方案Ⅲ方案Ⅳ⑥④①比较以上各个方案,方案Ⅰ、方案Ⅲ连接简单、支撑较好且轴套较少。
故选其绘制功率流线图、计算循环功率。
(1)方案Ⅰ1)当T制动时,只有中间排参与传动。
1制动时。
④、①排参加传动,此时的传动简图如下2)当T2写出此时各构件的转速方程如下:01122 3.21 2.2102.04 3.04002010/min i i i n n n n n n n n r -+=⎧⎪+-=⎪⎨=⎪⎪=⎩ 解得210661.18/min 1081.37/min o n n r n r =⎧⎪=⎨⎪=⎩计算各构件的转矩由于2 1.86i =,所以2 1.869951850.7.o i M i M N m =-=-⨯=-对第④排列转矩方程如下:444411 2.04 3.040995q j t j q i M M M M M M ⎧==⎪-⎪⎪+=⎨⎪=⎪⎪⎩ 求得444419.13.855.03.1274.16.t q j M N m M N m M N m ⎧=-⎪=-⎨⎪=⎩对第①排列方程:11111 2.21 3.210q j t j o M M M M M ⎧==⎪-⎨⎪+=⎩ 求得111576.54.1274.16.1850.7.t q j M N m M N m M N m ⎧=-⎪=-⎨⎪=⎩根据以上计算绘出功率流线图如上图所示。
由功率流线图可以看,此传动方案中无循环功率。
3)当T R 制动时,第①和第⑧行星排参与传动。
方案Ⅲ1) T 1制动时只有第三排参与转动。
2) T 2制动时第二、三排参与传动,此时的传动简图如下所示:写出此时各构件的转速方程如下:02 2.87 3.8701.91 2.91002010/min R i i R i i n n n n n n n n r =+-=⎧⎪+-=⎪⎨⎪⎪=⎩ 解得201319.28/min 1078.61/min R o n n r n r =⎧⎪=⎨⎪=⎩计算各构件的转矩由于2 1.86i =,所以2 1.869951850.7.o i M i M N m =-=-⨯=-对第④排列转矩方程如下:666631 1.91 2.910995j q t j j i M M M M M M ⎧==⎪-⎪⎪+=⎨⎪=⎪⎪⎩ 求得666857.57.1637.96.2495.54.t q j M N m M N m M N m ⎧=-⎪=-⎨⎪=⎩对第①排列方程:33331 2.87 3.870q j t q o M M M M M ⎧==⎪-⎨⎪+=⎩求得333644.84.1850.7.2495.54.t q j M N m M N mM N m ⎧=⎪=-⎨⎪=-⎩ 根据以上计算绘出功率流线图如上图所示。
由功率流线图可以看,此传动方案中有循环功率,3135.72135.729550t x kw M n p ⨯== 3)T R 制动时3排均传力。
结果:通过对两种方案在不同构件制动时的转速转矩以及循环功率的计算发现方案Ⅰ和方案Ⅲ在T2制动时各构件的转速和转矩相同,后者有循环功率。
且方案Ⅲ在TR 制动时三个行星排均参与传递,且构件布置较方案Ⅰ复杂。
通过比较,方案Ⅰ更合理,故选其作为做后续计算依据。
二.齿轮结构设计1.、齿轮模数和齿圈分度圆直径确定根据变速箱的输入转速和转矩,初选齿轮模数m=4,齿圈分度圆直径初选400mm 。
2、齿圈和太阳轮齿数计算齿圈的齿数为 由t qZ Z =α可得αq t Z Z =所以 44410043.672.04t t Z Z α=== ,取Z t4=44; 11110044.842.21q t Z Z α===,取Z t1=44 88810056.491.75q t Z Z α===,取Z t8=56; 由2tq X Z Z Z -=,计算得:3、齿轮传动安装条件校核(1)同心条件的校核 由于方案Ⅰ三个行星排均满足2tq X Z Z Z -=条件,所以同心条件满足。
(2)、确定每个行星排的行星轮个数及其布置形式,并根据同心条件计算行星轮齿数 查相关资料了解到行星传动一般选择3个行星轮,故此处选3个行星轮均匀布置。
(3)装配条件校核装配条件的公式为: N n Z Z qt =+ ,其中n 为行星排上的行星轮个数,在这里n=3;装配条件校核如下:第(4)排:4410044483t q Z Z n++== 第(1)排:1110044483t q Z Z n++== 第(8)排:8810056523q q Z Z n ++== 计算结果均为整数,故装配条件可得到满足。
(4)相邻条件为保证行星轮在传动时步干涉并较少搅油损失,相邻的两个行星轮的齿顶间的间隙应该大于5~8mm ,经计算发现三个相邻的行星轮齿顶间的间隙满足要求。
(5)将行星传动的参数列表如下:(6)传动比误差校核:在设计中由于各种因素的制约传动比往往不能与理想值完全相同,所以必须对传动比误差进行校核,一般将传动比控制在3%~5%之内。
现对传动比误差进行校核如下: 第④排 44100 2.2744q t Z Z α===4实 第①排 111100 2.2744q t Z Z α===实 第⑧排 88100 1.7856q t Z Z α===8实 列实际传动方程:212.27 3.270i n n n +-= (11)102.27 2.270i n n n +-= (12)101.78 2.780R n n n +-= (13)方程(12)与(1)对比得 1i 实=方程(12)联立(13)消去1n 得方程 3.04 4.040i o R n n n +-=与方程(3)对比得i R 实= 方程(11)联立(12)消去1n 得方程2 1.07 2.070i o n n n +-=与方程(2)对比得i 2实= 误差校核1档 111 3.27 3.23 1.8%5%3.23i i i δ--===1实R 档 R3.04 2.94 3.4%5%2.94R R i i i δ--===R 实2档 222 1.934 1.930.4%5%1.93i i i δ--===2实由校核结果看,方案Ⅰ满足传动比条件三、绘制综合转速平面图,分析构件的转速并确定换档离合器位置1、已知条件(1)、各档传动比 (此处的传动比为齿轮齿数确定之后的实际传动比)1i 实= i 2实= i R 实=(2)、制动件转速方程式: b n =111---i n i i o (1) (3)、行星轮转速方程式: x n =A An o - (2)式中: b n 、o n 、x n ——分别表示制动构件、输出构件和行星轮的转速;i —任意一档的传动比; A —常数。