轮式寻迹机器人装配说明书
智能循迹车使用说明书

智能循迹车使用说明书
1.循迹板实物图
说明:循迹板共有5个探头(Q1~Q5),分别对应的输出端为OUT Q1~Q5。
工作原理:发射头发射红外线,当地面没有黑线时,红外线被反射回来,接收头接收
到后接收端导通,导通则T1接地=0;反向端大于同向端, 则OUT 端输出低电平为低1给单片机识别,单片机通过扫描引脚来判断黑线状态。
同理,当黑线将红外线吸收时,那么OUT 端输出高电平1给单片机。
在输出端接有工作指示灯,当第电平时,指示灯亮.
2.循迹板电路图
3.循迹探头说明书
4.循迹算法分析
T1
A . B. C.
A.一个探头检测到信号
B.侧边一个探头检测到信号
C.两个探头同时检测到信号
5.电机驱动
电机驱动结构简图
电机驱动分析:这是一个H 桥电路,当LA 点位低电平时,Q3,Q2截止,Q7,Q1导通,电机左端呈高电平;当LB 点位高电平时,Q8,Q2截止,Q6,Q5导通,电机左端呈高电平;因此,在LA 为0,LB 为1时,电动机正转,反之,电动机反转。
如果LA,LB 同为高电平或低电平时,电机停止转动。
LA
LB。
机器人车间装配作业指导书
机器人车间装配作业指导书
简介
本文档旨在为机器人车间的操作员提供详细的装配作业指导。
通过遵循本指导书,操作员将能够正确、高效地完成装配作业。
准备工作
在开始装配作业之前,请确保以下准备工作完成:
- 确认所需装配部件及数量是否齐全;
- 准备好所需的工具和设备;
- 了解装配作业的流程及要求。
装配步骤
下面是机器人车间的装配作业步骤:
1. 步骤1:在工作区域内设置所需的装配工位和设备。
2. 步骤2:查阅装配图纸,了解装配作业的要求和顺序。
3. 步骤3:检查每个装配部件的质量和完整性,确保其符合要求。
4. 步骤4:根据装配图纸,按照正确的顺序组装部件。
5. 步骤5:在装配过程中,注意检查每个部件的连接是否牢固,避免松动或者错误连接。
6. 步骤6:完成装配后,仔细检查整体装配是否符合要求,确
保没有遗漏或错误。
7. 步骤7:对已完成的装配进行测试,确保其功能正常。
8. 步骤8:清理工作区域,妥善存放未使用的部件和工具。
安全事项
在进行装配作业时,请务必遵守以下安全事项:
1. 佩戴个人防护装备,如安全眼镜、手套等。
2. 在装配作业时,注意机器和设备的安全使用,避免发生意外
事故。
3. 注意锋利工具的使用,避免划伤和意外伤害。
4. 若有不明确的装配步骤或存在安全风险,请及时向上级主管
或专业人员咨询。
总结
本文档提供了机器人车间装配作业的详细指导,涵盖了准备工作、装配步骤和安全事项。
通过按照指导书的要求进行操作,操作员将能够安全、高效地完成装配作业。
自动寻迹避障轮式机器人--综合实验设计报告

专业综合实验设计报告项目:自动寻迹避障轮式机器人班级:电133姓名:学号:1312021067同组同学:学期:2016-2017-1一、实验目的和要求1.1实验目的自动循迹、智能避障机器人是一个与电气工程专业有着密切关系的实际工程装备,本综合实验以此为依托,把轮式机器人能够沿设置的道路路线运动作为控制目标,完成从模型建立、控制方案确定、控制参数仿真分析、硬件线路设计到实物机械安装、硬件安装调试、控制程序编写集成、系统调试等步骤过程的训练。
本实验涉及到《电路分析》、《电子技术》、《电力电子技术》、《电机学》、《电力拖动》、《自动控制原理》、《传感器与检测技术》、《电机控制技术》等课程的理论和实验知识。
是学生接触实际电气工程专业复杂工程问题的重要及关键途径。
通过实验培养学生实践动手能力,运用现代工程工具和信息技术工具的能力,分析和解决实际工程问题的能力。
从而使学生初步能够解决主要涉及电气工程专业知识的复杂工程问题。
1.2实验要求要求同学综合运用课程的理论和实验知识,以轮式机器人能够以一定的速度沿设置的道路路线运动作为控制目标(技术指标为:机器人行走速度≥1m/s,行走偏离导航线程度≤2/3车身宽度),要求完成从模型建立、控制方案确定、控制参数仿真分析、硬件线路设计到实物机械安装、硬件安装调试、控制程序编写集成、系统调试等实验步骤。
具体要求为:1)检索资料,对轮式机器人的发展状况,当前的研究热点,技术发展的现状,发展趋势有所了解,查阅工程规范文件、产品样本、使用说明,了解实际系统运行时必须遵守的工程规范和系统实现时所受到的商用产品的实际限制。
2)理解轮式机器人的机械结构,用CAD软件绘制机械零部件的加工图纸,安装轮式机器人。
3)综合运用物理特性分析法和实验参数测定法建立轮式机器人的数学模型,必要时在工作点附近近似线性化,以获得线性数学模型。
4)设计轮式机器人控制系统的硬件系统,包括控制芯片的选型,外围电路的设计,传感器类型型号的选择、功率驱动电路的选择、人机交互部件的选择,掌握所选择元器件、部件的性能、用法。
循迹小车的组装说明(压缩)
循迹小车车身的组装
(注意连接扣、底板连接放置的位置)
万向轮的组装
(注意连接扣的长度连杆与万向轮支架连接的方向)
小车驱动电机的组装
(注意电机安装的位置)
车轮组件的组装
万向轮的装配
传感器固定装置的组装
(注意连接口、之型连杆连接的方向)
小车行走探测传感器的组装
循迹小车全观图
(电源部分与控制电路板组装未说明详见公司网站说明)
硬件连接示意图
循迹小车程序截图
循迹右电机分别连接在 主板所示的两个端口。 前进探测传感器左右传感器分别接在输入 口0、1口。 打开ZB2软件,打开所给程序资料,下载 到主板运行,若小车不能走黑线调整传感 器、电机的连接口。
西安交通大学agv设计自动循迹代步轮椅设计说明书

自动循迹代步轮椅设计说明书机自16班机械部分王剑虹 2110101145电路部分佀昶 2110302019目录1、概述 (1)1.1总体概述 (2)1.2市场背景 (2)1.3适用人群 (3)2、机械部分 (4)2.1设计要求 (4)2.2具体机构设计和标准件选择 (4)2.2.1车架设计 (4)2.2.1.1前车架设计 (5)2.2.1.2后车架设计 (6)2.2.2电机选择 (6)2.2.3后轮选择 (7)2.2.4前轮选择 (8)2.3可靠性分析 (8)3、控制电路部分 (9)3.1主芯片选择 (9)3.2位置检查模块 (12)3.3电机驱动模块选择 (13)4.系统软件的设计 (18)4.1应用软件的设计 (18)4.2软件测试 (18)4.3电机选择 (20)4.4轮椅转向系统的设计 (26)4.5具体程序代码 (28)参考文献 (37)1、概述1.1总体概述自动循迹代步轮椅是一款辅助老人、残疾人士出行的自动循迹电动轮椅。
其整体外观如图1.1所示。
其设计思想是使用光电循迹原理,结合软件编程,机械控制等方法,达到自动循迹的效果。
此产品设计过程中综合了机电一体化设计思想,将机械和电子有机结合起来,用电子辅助机械,使在功能不变的前提下结构尽量简单,运作可靠。
产品的设计从用户角度出发,将产品设计得人性化。
本产品使用电瓶作为动力,能源清洁,获取方便。
车架选用钢材结构,保证强度的前提下,使结构紧凑可靠。
轮胎使用实心橡胶轮胎,减震性能良好,避免用户充气的麻烦。
图1.1 自动循迹轮椅整体外观1.2背景市场随着能源短缺和环保需要,电动车所占的比重越来越大。
相对传统机车,电动车拥有结构简单,能源清洁,重量轻,运行可靠,维修方便,价格低廉等优点。
设计过程中采用了机电一体化设计思路,使机械与电子部分充分结合起来,机电一体化设计模式见图1.2。
图1.2 机电一体化设计模式简介近几年,电动轮椅也逐步发展起来,并且逐年改进,功能越来越完善。
简易循迹小车装配图文资料讲解
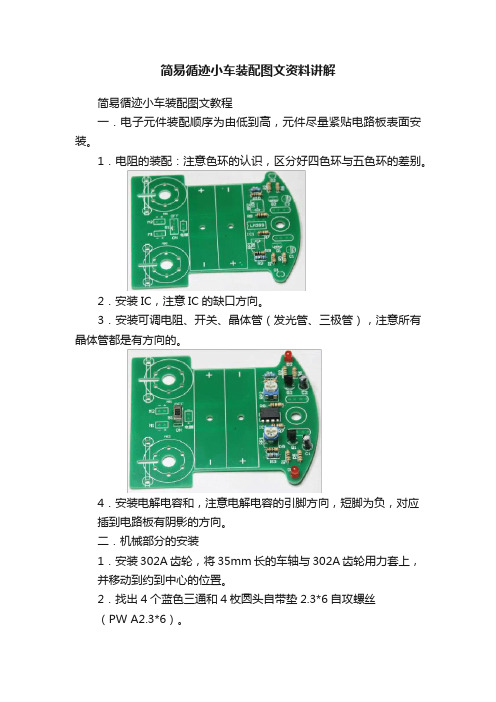
简易循迹小车装配图文资料讲解简易循迹小车装配图文教程一.电子元件装配顺序为由低到高,元件尽量紧贴电路板表面安装。
1.电阻的装配:注意色环的认识,区分好四色环与五色环的差别。
2.安装IC,注意IC的缺口方向。
3.安装可调电阻、开关、晶体管(发光管、三极管),注意所有晶体管都是有方向的。
4.安装电解电容和,注意电解电容的引脚方向,短脚为负,对应插到电路板有阴影的方向。
二.机械部分的安装1.安装302A齿轮,将35mm长的车轴与302A齿轮用力套上,并移动到约到中心的位置。
2.找出4个蓝色三通和4枚圆头自带垫2.3*6自攻螺丝(PW A2.3*6)。
3.先将内侧的两个三通用螺丝固定到电路板上。
4.将车轴和齿轮套入三通中,并移动齿轮位置,使齿轮在电路板的卡槽中,车轴刚好超出三通多一点,不超过1mm。
5.将另外两个三通套入车轴中并用螺丝固定到电路板上。
6.将蜗杆用力套入电机轴中,并压到接近电机轴承的位置,找出6-12枚2*3mm的圆头机丝螺丝用于固定电机。
7.将电机用螺丝固定到电路板上,一般每个电机固定3枚螺丝就OK了。
8.将车轮用力套入车轴上,并移动到接近电路板的位置。
(注意用力技巧,可以将车轴的另一端先靠到桌面等固定物上,适当用力敲打车轮到合适位置。
)9.将5*20的螺丝加配套螺母固定到电路板上,然后套上不锈钢盖形螺母作为万向轮使用。
三.安装剩余电路部分。
1.安装循迹红外发射与接收管,注意有正负方向的区别,使其高度略低于万向轮约3-5mm。
2.安装电池盒,电池盒通过不干胶粘到电路板上,注意位置必须准确,确保一次性成功,不可进行二次粘接。
连接电机导线,可以将过长的导线剪到合适的长度,新剥开的线头先要捻头并烫锡处理,线头长度不超过2mm。
电池盒用不干胶固定到电路板上,需特别注意电源的正负极不要接反,电机反转可以交换两条线的位置。
套件默认提供的是2节5号电池盒,可用2节碱性电池供电的(套件中不提供,需自备)。
轮式寻迹机器人装配说明书
轮式寻迹机器人装配说明书1、清点组装所需要的零件(1) 电池盒组件包含有单头2Pin-2.54塑插线一条、M3螺母两颗、M3*8沉头螺丝两个、热缩管一截、4节装5号电池盒一个。
实物如图1所示。
(2) 主板支撑组件包含有M3螺母四颗、M3*8沉头螺丝四个、M3*25+6铜柱四条。
实物如图2所示。
图1 电池盒组件图2 主板支撑组件图3 后轮组件(3) 后轮组件包含有连轴一条、连轴卡两个、轮卡四个、通孔轮两个、后轮支撑板两片。
实物如图3所示。
(4) 前轮组件包含有半通孔轮两个、防滑轮皮两个、轮轴两个。
实物如图4所示。
(5) 电机组件包含有直流减速电机两个、单头2Pin-2.54塑插线两条、M3螺母四颗、电机支撑板两片、M3*25沉头螺丝四个。
实物如图5所示。
图4 前轮组件图5 电机组件图6 传感器组件(6) 传感器组件包含有双头7Pin-2.54塑插线一条、M3螺母一颗、M3*8沉头螺丝一个。
实物如图6所示。
(7) 机器人底板底板中有焊盘或电机符号面为底层面,此面包含焊接电机支撑板、后轮支撑板,另外电机安装也在此层面。
反之为顶层面,在顶层面需要安装电池盒、主板支撑组件等。
机器人底板实物如图7-1(底层面),如图7-2(顶层面)。
图7-1 机器人底层面图7-2 机器人顶层面(8) 传感器板和主板 传感器板功能是检测机器人前方是否有物体和检测机器人下方的黑色线带。
主板完成机器人的运动控制等功能。
这两个板均为套件,需要自己对应电路图进行焊接练习训练,焊接过程这里不做详述。
实物如图8-1(传感器板)和图8-2(主板)所示。
图8-1 传感器板 图8-2 主板2、 开始组装(1) 将后轮组件中的后轮支撑板按图9所示进行卡槽并加焊锡焊接牢固,而电机组件中的电机支撑板按图10所示进行焊接。
图9 后轮支撑板的安装 图10 电机支撑板的安装(2)将三条单头2Pin-2.54塑插线按图11在底板中的通孔中穿插。
图11 电机线和电池盒线的穿插位置(3)电机线和电池盒线按图12所示一一对应焊接并用热缩管做好绝缘处理。
MAX BOT 机器人组装说明书
MAX:BOT机器人组装说明书目录认识新朋友 (1)STEP1 安装电机到车身 (3)STEP2 安装电池盒到车身 (4)STEP3 安装喇叭到电路板 (6)STEP4 安装电路板到车身 (8)STEP5 安装驱动车轮到车身 (10)STEP6 安装支撑轮到车身 (11)STEP7 安装碰撞传感器到车身 (12)STEP8 安装巡线传感器到车身 (13)STEP9 安装超声波传感器到车身 (14)STEP10 安装灯带到车顶 (16)STEP11 安装车顶到车身 (17)STEP12 安装Micro:bit (18)实物图片驱动车轮2 电路板1碰撞传感器2 双面胶1巡线传感器1 导线7MicroUSB 连接线1 直流电机2超声波传感器1灯带2 其他工具若干 —— —— —器材准备齐全后,接下来就要正式开始组装Max:bot 啦,你准备好了吗?所需元件电机*2,十字槽盘头螺钉及螺帽*2,车身*1,十字套筒*1安装步骤按照下图所示把两个电机固定在车身底座(注意:为了方便后续接线,请将两根电机线穿过车身后端)所需元件电池盒*1,魔术贴*2,车身*1安装步骤在车身底座和电池底部各安装一个魔术贴(见下图)按照下图所示位置把电池固定在车身底座(注意:电池线要从车身后面穿出。
)STEP3 安装喇叭到电路板所需元件电路板*1,喇叭模块*1,支柱*4,大头平尾自攻螺钉*8,螺丝刀*1安装步骤用四颗螺钉将四根支柱固定在电路板上(见下图)正面 背面 按照下图所示位置完成喇叭模块和电路板的连线按照下图所示位置用四颗螺钉将喇叭模块固定在电路板上(注意:喇叭线要藏在喇叭模块和电路板之间的缝隙中)STEP4 安装电路板到车身所需元件电路板*1,车身*1,大头平尾自攻螺钉*4,螺丝刀*1安装步骤按照下图将车身后部穿出的两根电机线和一根电池线分别连在电路板上的相应接口中(注意:电机线和电池线要藏在电路板和车身之间的缝隙中)用四颗螺钉将安装好喇叭模块的电路板固定在车身上(见下图)所需元件车身*1,驱动车轮*2,盘头自攻螺钉*2,螺丝刀*1安装步骤将两个车轮分别插入车身两侧伸出的白色横轴中(见下图)将两颗螺钉分别插入车轮中央的凹槽并用螺丝刀拧紧(见下图)所需元件车身*1,支撑轮*1,沉头螺钉*2,螺丝刀*1安装步骤组装支撑轮(见下图)按照下图用螺钉把支撑轮固定在车头底座(注意:支撑轮朝后,避免遮挡巡线传感器)所需元件碰撞传感器*2,导线*2,车身*1,大头平尾自攻螺钉*4,螺丝刀*1安装步骤将两根导线的一端分别插入碰撞传感器的接口(见下图)分别用两颗螺钉将碰撞传感器固定在车头,并将两根导线的另一端分别插入电路板上的P13和P16接口(见下图)所需元件巡线传感器*1,导线*2,车身*1,大头平尾自攻螺钉*1,螺丝刀*1安装步骤将两根导线的一端分别插入巡线传感器最外侧的两个接口(见下图)用螺钉把巡线传感器固定在车头,并把两根导线的另一端分别插入电路板上的P14和P15接口(见下图)所需元件超声波传感器*1,导线*1,车身*1,支柱*2,大头平尾自攻螺钉*2,螺丝刀*1安装步骤(1)按照下图用导线连接超声波传感器和电路板(注意:超声波传感器的TRIG、ECHO、GND和+5V分别对应电路板上的P1、P2、GND、3V3)(2)将两根支柱顺时针拧入车身正前方(见下图)(3)用两颗螺钉把超声波传感器固定在车身正前方的两根支柱上(见下图)所需元件灯带*2,双面胶*1,车顶*1安装步骤(1)按照下图取适当长度的两段双面胶分别粘在车顶的两侧(2)按照下图将两条灯带分别粘在车顶的双面胶上(注意灯带的正反和摆放方向)所需元件车顶*1,车身*1,旋钮*2安装步骤(1)按照下图将灯带上的导线分别插入到电路板上的P5和P11接口(1)按照下图用两颗旋钮把车顶固定在车身上STEP12 安装Micro:bit所需元件Micro:bit *1,车身*1安装步骤按照下图将Micro:bit插入至电路板上的插槽(注意Micro:bit的正反和方向)恭喜你成功组装了MAX:BOT机器人,开始你的MAX:BOT探索之旅吧!。
机器人装车机使用说明书
机器人装车机使用说明书1. 引言欢迎使用机器人装车机。
本使用说明书将向您介绍该装车机的各项功能和操作方法,以帮助您正确、高效地使用该设备。
2. 设备概述机器人装车机是一种自动化装卸设备,用于在仓库、工厂等场所完成货物的装车作业。
它由底盘、载货平台、导航系统、控制系统等部分组成。
2.1 底盘底盘是机器人装车机的基础部分,承载整个设备的重量,并提供移动功能。
它通常采用四轮驱动,具有良好的操控性和稳定性。
2.2 载货平台载货平台是用于放置货物的部分,可以根据需要进行升降和旋转。
它通常由钢材制成,具有足够的承载能力和稳定性。
2.3 导航系统导航系统是机器人装车机实现自主导航的关键组成部分。
它通过激光雷达、摄像头等传感器获取环境信息,并通过算法进行处理和判断,以实现路径规划和避障功能。
2.4 控制系统控制系统是机器人装车机的大脑,负责接收和处理各种指令,并控制设备的运动和操作。
它通常由嵌入式计算机和相应的软件构成。
3. 功能特点机器人装车机具有以下功能特点:3.1 自主导航机器人装车机可以根据预设的路径和地图进行自主导航,无需人工干预。
它可以通过激光雷达等传感器感知周围环境,并避开障碍物,确保安全运行。
3.2 货物识别机器人装车机配备了视觉系统,可以对货物进行识别和定位。
它能够准确地找到目标货物,并将其移动到指定位置。
3.3 智能操作机器人装车机可以通过控制系统实现智能操作。
它可以根据不同的货物尺寸和重量进行自适应调整,提高装卸效率。
3.4 远程监控机器人装车机支持远程监控功能,用户可以通过手机、电脑等终端设备对设备进行实时监控和操作。
这使得用户可以随时了解设备状态,并进行远程调度。
4. 操作方法以下是机器人装车机的基本操作方法:4.1 启动与停止按下启动按钮,等待设备自检完成后,机器人装车机将进入工作状态。
按下停止按钮,设备将停止工作并切换到待机状态。
4.2 导航与路径规划在控制系统中设置起点和终点位置,机器人装车机将根据设定的路径进行导航。
单片机-智能循迹机器人说明书
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊目录第1章前言 (2)1.1 智能循迹机器人简介 (2)1.2 设计目的 (2)1.3 设计内容及要求 (2)第2章硬件设计及说明 (3)2.1 系统设计 (3)2.2 电机驱动部分 (4)2.3芯片AT89S51的内部资源及工作介绍 (4)第3章软件设计及说明 (6)3.1 软件系统流程图 (6)3.2 子模块的原理图及过做过程实验代码 (7)第4章智能循迹机器人的功能简介 (28)第 5章设计心得与体会 (29)参考文献 (30)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊第1章前言1.1 智能循迹机器人简介单片机益智系类—智能循迹机器人是由益芯科技有限公司为科教方便而研发设计的。
根据现代学校对嵌入式系统开发的需求。
依据提高学生实际动手能力和思考能力,以加强学生对现实生活中嵌入式系统的应用为参照。
智能循迹机器人全新的设计模式,良好的电路设计,一体化的机电组合,智趣的系统开发,更是成为加强学生学习兴趣的总动源。
1.2 设计目的1.明确智能循迹机器人的设计原理。
2. 学会智能循迹机器人的组装、焊接方法。
3. 熟悉芯片AT89S51及各个子模块的使用方法,并掌握其工作原理。
4. 编写、调试各个应用程序,实现要求的各种功能。
5. 电子技术课程设计是学习电子技术十分重要的环节之一,对于巩固所学的电子技术理论知识,加强基本的技能训练具有明显的积极作用。
1.3 设计内容及要求1. 分析智能循迹机器人电路原理图、熟识各个电子元器件。
2. 主要技术要求:智能循迹机器人循迹避障、避悬崖、数码显示声控光控停止与行进及蜂鸣报警、红外线遥控等功能,3. 焊接、组装、调试智能循迹机器人4. 写出设计说明书、任务书。
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊第2章硬件设计及说明2.1 系统设计本组智能小车的硬件主要有以AT89S51作为核心的主控器部分、自动循迹部分、显示部分、电机驱动部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轮式寻迹机器人装配说明书
1、清点组装所需要的零件
(1) 电池盒组件包含有单头2Pin-2.54塑插线一条、M3螺母两颗、M3*8沉头螺丝两个、热缩管一截、4节装5号电池盒一个。
实物如图1所示。
(2) 主板支撑组件包含有M3螺母四颗、M3*8沉头螺丝四个、M3*25+6铜柱四条。
实物如图2所示。
图1 电池盒组件图2 主板支撑组件图3 后轮组件
(3) 后轮组件包含有连轴一条、连轴卡两个、轮卡四个、通孔轮两个、后轮支撑板两片。
实物如图3所示。
(4) 前轮组件包含有半通孔轮两个、防滑轮皮两个、轮轴两个。
实物如图4所示。
(5) 电机组件包含有直流减速电机两个、单头2Pin-2.54塑插线两条、M3螺母四颗、电机支撑板两片、M3*25沉头螺丝四个。
实物如图5所示。
图4 前轮组件图5 电机组件图6 传感器组件
(6) 传感器组件包含有双头7Pin-2.54塑插线一条、M3螺母一颗、M3*8沉头螺丝一个。
实物如图6所示。
(7) 机器人底板底板中有焊盘或电机符号面为底层面,此面包含焊接电机支撑板、后轮支撑板,另外电机安装也在此层面。
反之为顶层面,在顶层面需要安装电池盒、主板支撑组件等。
机器人底板实物如图7-1(底层
面),如图7-2(顶层面)。
图7-1 机器人底层面
图7-2 机器人顶层面
(8) 传感器板和主板 传感器板功能是检测机器人前方是否有物体和检测机器人下方的黑色线带。
主板完成机
器人的运动控制等功能。
这两个板均为套件,需要自己对应电路图进行焊接练习训练,焊接过程这里不做详述。
实物如图8-1(传感器板)和图8-2(主板)所示。
图8-1 传感器板 图8-2 主板
2、 开始组装
(1) 将后轮组件中的后轮支撑板按图9所示进行卡槽并加焊锡焊接牢固,而电机组件中的电机支撑板按图10所示
进行焊接。
图9 后轮支撑板的安装 图10 电机支撑板的安装
(2)将三条单头2Pin-2.54塑插线按图11在底板中的通孔中穿插。
图11 电机线和电池盒线的穿插位置
(3)电机线和电池盒线按图12所示一一对应焊接并用热缩管做好绝缘处理。
(4)电机的安装如图13所示,左右电机均由两颗M3*25沉头螺丝穿过电机并固定在支撑板中用螺母拧住。
(5)电池的安装如图14所示,在底板写有“CSKC-KC02”字样面用两颗M3*8沉头螺丝从电池盒面穿过底板并用两个M3螺母拧住。
图12 线材焊接和处理图13 电机的安装图14 电池盒的安装
(6)安装固定主板的两个铜柱,如图15所示,有螺纹段穿过固定有电池面的底板,螺纹段用螺母拧住。
需要注意
的是铜柱安装位置需要和主板的机械安装孔距离对位。
(7)前轮轮胎的组装,如图16所示。
将防滑轮套套在轮骨上,而轮子的圆心还需要将轮轴安装进去。
注意:将有
齿纹段的轮轴安装在轮子圆心外侧。
图15 四个铜柱的安装图16 前轮轮胎的组装
(8)前轮与电机连接的安装如图17所示。
将有齿纹段的轮轴插入电机轴心孔内即可。
(9)后轮与小车的连接组装如图18所示。
先将连轴一端的后轮(左后轮)安装好,然后将单头连轴从一端的支撑
板中心穿过并连起另一个支撑板,再将连轴另一端的后轮(右后轮)安装好。
图17 前轮与电机的安装图18 后轮的安装
(10)安装至此,先全局看看整个结构的体形是否符合图19-1和图19-2所示示样。
图19-1 小车底面视图图19-2 小车顶面视图
(11)主板安装和电机线、电源线的连接,如图20-1和图20-2所示。
主板用4个M3*8沉头螺丝拧住即可,而线材
可能过长,处理方法如图20-2所示,在铜柱上绕几圈。
图20-1 主板的安装图20-2 线材的处理
(12)最后寻迹传感器板的组装,如图21-1所示,将传感器板的信号电源线与主板对接好,然后按图21-2用螺丝螺
母拧住。
注意传感器板在底板的下方,这个关系到红外传感器元件的焊接高度等。
图21-1 传感器线信号线的连接 图21-2 传感器板的安装
(13) 需要注意的是:寻迹传感器的焊接接收管要用热缩管包好,同时在测试时如果发现有寻找黑线不灵敏或不能
寻找的请调试下发射管和接收管相互靠近的距离。
图22所示是我们样品测试机的调试高度和距离。
上面一对需要靠近,而下面一对需要分离一些距离。
图22 样机测试
2013-9-20 长沙科彩电子有限公司 编。