极坐标系公式
极坐标和直角坐标的互化公式

极坐标和直角坐标的互化公式
极坐标和直角坐标是两种不同的坐标系,它们在数学和物理学中都有广泛的应用。
极坐标是一种描述平面上点位置的坐标系,它由极径和极角两个参数组成。
直角坐标是另一种描述平面上点位置的坐标系,它由x轴和y轴两个参数组成。
在实际应用中,我们经常需要将极坐标和直角坐标进行互化,以便更好地理解和计算。
极坐标和直角坐标的互化公式如下:
直角坐标系中的点(x,y)可以表示为极坐标系中的点(r,θ),其中:
r = √(x² + y²)
θ = arctan(y/x)
反之,极坐标系中的点(r,θ)可以表示为直角坐标系中的点(x,y),其中:
x = r cos(θ)
y = r sin(θ)
这些公式可以帮助我们在不同的坐标系之间进行转换。
例如,如果我们知道一个点在极坐标系中的位置,但需要将其转换为直角坐标系中的位置,我们可以使用上述公式计算出x和y的值。
同样地,如果我们知道一个点在直角坐标系中的位置,但需要将其转换为极
坐标系中的位置,我们也可以使用上述公式计算出r和θ的值。
极坐标和直角坐标的互化公式在物理学和工程学中有广泛的应用。
例如,在机械工程中,我们经常需要计算旋转物体的位置和速度。
这些计算通常使用极坐标系,因为它更适合描述旋转运动。
然而,在计算机辅助设计和制造中,我们通常使用直角坐标系,因为它更适合描述平面上的几何形状。
极坐标和直角坐标是两种不同的坐标系,它们在数学和物理学中都有广泛的应用。
通过使用极坐标和直角坐标的互化公式,我们可以在不同的坐标系之间进行转换,以便更好地理解和计算。
直角坐标与极坐标的转化公式

直角坐标与极坐标的转化公式直角坐标和极坐标是在二维平面上描述点位置的两种常用方式。
直角坐标系统使用水平轴(X轴)和垂直轴(Y轴)上的数值来表示点的位置,而极坐标系统使用角度和半径来表示点的位置。
在数学和物理中,我们经常需要在这两种坐标系统之间进行转换。
下面将介绍直角坐标与极坐标之间的转化公式。
1.直角坐标转极坐标对于直角坐标系中的一个点(x,y),我们可以使用以下公式将其转换为极坐标系统中的点(r,θ):•半径r的计算公式:r = √(x² + y²)•角度θ的计算公式:θ = atan2(y, x)其中,√表示平方根操作,atan2是反正切函数,返回从原点(0,0)到点(x,y)的直线与正x轴之间的角度,取值范围为[-π, π]。
2.极坐标转直角坐标对于极坐标系中的一个点(r,θ),我们可以使用以下公式将其转换为直角坐标系统中的点(x,y):•横坐标x的计算公式:x = r * cos(θ)•纵坐标y的计算公式:y = r * sin(θ)其中,cos是余弦函数,sin是正弦函数。
需要注意的是,θ的取值范围通常是[-π, π]或[0, 2π],这取决于具体的应用领域和约定。
通过以上的转化公式,我们可以方便地在直角坐标和极坐标之间进行转换。
这在数学和物理中有着广泛的应用。
例如,在极坐标中,圆的方程可以简化为r = a或θ = b,这在分析圆的性质时非常有用。
另外,在物理中,电场、磁场等也常常使用极坐标进行描述,因为在极坐标中计算起来更加简便。
值得一提的是,转换过程中需要注意选择合适的θ的取值范围,并进行角度单位的转换(弧度制和角度制)。
通常情况下,我们倾向于使用弧度制,因为它的计算更加方便。
总结起来,直角坐标与极坐标的转化公式为:•直角坐标转极坐标:–r = √(x² + y²)–θ = ata n2(y, x)•极坐标转直角坐标:–x = r * cos(θ)–y = r * sin(θ)这些转换公式在数学和物理领域具有重要的意义,可以帮助我们更好地理解和应用直角坐标和极坐标系统。
极坐标公式

极坐标与直角坐标系转换公式:x=r*cosθ y=r*sinθljm1985782009-06-29 16:41:09x=r*cosθy=r*sinθmeitian52009-06-29 18:30:45极坐标系中的两个坐标r 和θ 可以由下面的公式转换为直角坐标系下的坐标值x = r \cos \theta \,y = r \sin \theta \,由上述二公式,可得到从直角坐标系中x 和y 两坐标如何计算出极坐标下的坐标r = \sqrt{x^2 + y^2} \,\theta = \arctan \frac{y}{x}\ uad x \ne 0 \,[9]在x = 0的情况下:若y 为正数θ = 90° (π/2 radians); 若y 为负, 则θ = 270° (3π/2 radians).[编辑] 极坐标方程用极坐标系描述的曲线方程称作极坐标方程,通常表示为r为自变量θ的函数。
极坐标方程经常会表现出不同的对称形式,如果r(−θ) = r(θ),则曲线关于极点(0°/180°)对称,如果r(π−θ) = r(θ),则曲线关于极点(90°/270°)对称,如果r(θ−α) = r(θ),则曲线相当于从极点逆时针方向旋转α°。
[9]meikai8922467892009-07-22 11:07:50极坐标系中的两个坐标r 和θ 可以由下面的公式转换为直角坐标系下的坐标值x = r \cos \theta \,y = r \sin \theta \,由上述二公式,可得到从直角坐标系中x 和y 两坐标如何计算出极坐标下的坐标r = \sqrt{x^2 + y^2} \,\theta = \arctan \frac{y}{x}\ uad x \ne 0 \,[9]在x = 0的情况下:若y 为正数θ = 90° (π/2 radians); 若y 为负, 则θ = 270° (3π/2 radians).[编辑] 极坐标方程用极坐标系描述的曲线方程称作极坐标方程,通常表示为r为自变量θ的函数。
直角坐标方程转化为极坐标公式推导

直角坐标方程转化为极坐标公式推导在数学中,直角坐标系和极坐标系是两种常用的坐标系统,它们可以相互转化。
直角坐标系使用x轴和y轴表示平面上的点,而极坐标系使用r和$\\theta$表示。
本文将详细介绍如何将直角坐标方程转化为极坐标公式。
首先,我们从直角坐标方程开始,假设有一个函数f(x,y),其直角坐标方程为:F(x,y)=0要将这个直角坐标方程转化为极坐标公式,我们需要首先了解直角坐标系和极坐标系之间的关系。
在直角坐标系中,点(x,y)可以表示为极坐标$(r, \\theta)$。
其中r是点(x,y)到原点(0,0)的距离,$\\theta$是点(x,y)与x轴的夹角。
根据直角坐标系和极坐标系之间的关系,点(x,y)的坐标可以用r和$\\theta$表示为:$$x = r\\cos(\\theta)$$$$y = r\\sin(\\theta)$$现在,我们将这一点代入直角坐标方程F(x,y)=0中:$$F(r\\cos(\\theta), r\\sin(\\theta)) = 0$$接下来,我们需要对上式进行推导,将其转化为极坐标公式。
为了方便推导,我们将函数F(x,y)进行泰勒展开:F(x+ℎ,y+k)=F(x,y)+ℎF′(x,y)+kF′(x,y)+O(ℎ2,k2)将$x = r\\cos(\\theta)$和$y = r\\sin(\\theta)$代入上式:$$F(r\\cos(\\theta)+h,r\\sin(\\theta)+k)=F(r\\cos(\\theta),r\\sin(\\theta))+ hF'_{x}(r\\cos(\\theta),r\\sin(\\theta))+kF'_{y}(r\\cos(\\theta),r\\sin(\\theta))+O(h^2,k^2)$$其中,F′x和F′y分别表示F(x,y)对x和y的偏导数。
由于r和$\\theta$是关于x和y的函数,我们可以使用链式法则计算这些偏导数。
极坐标与参数方程

极坐标与参数方程一、 极坐标1.极坐标系:极坐标系:以直角坐标原点为极点,x 轴的非负半轴为极轴,一个线段长度为极径,逆时针方向为正方向旋转一定的角度建立的坐标系称为极坐标系.设M 为平面内一点,极点O 与点M 的距离|OM |叫作点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM 叫作点M 的极角,记为θ,有序实数对(ρ,θ)叫作点M 的极坐标,记作M (ρ,θ),一般地,不作特殊说明时,我们认为ρ≥0,θ可取任意实数.2.直角坐标与极坐标的互化:以直角坐标系的O 为极点,x 轴正半轴为极轴,且在两坐标系中取相同的单位长度,平面内的任一点P 的直角坐标和极坐标分别为(x ,y )和(ρ,θ),则cos sin x y ρθρθ=⎧⎨=⎩,或222tan (0)x y y x x ρθ⎧=+⎪⎨=≠⎪⎩.二、参数方程1.参数方程的定义存在一个参变量t ,使得⎩⎪⎨⎪⎧x =f (t ),y =g (t )(t 为参变数),即为参数方程. 2.直线的参数方程过定点M 0(x 0,y 0)、倾斜角为α的直线l 的参数方程为⎩⎪⎨⎪⎧x =x 0+t cos α,y =y 0+t sin α(t 为参数),这一形式称为直线参数方程的标准形式,直线上的动点M 到定点M 0的距离等于参数t 的绝对值.当t >0时,M 0M →的方向向上;当t <0时,M 0M →的方向向下;当点M 与点M 0重合时,t=0.直线的标准参数方程:若直线的参数方程一般形式为:⎩⎪⎨⎪⎧x =x 0+at ,y =y 0+bt ( t 为参数), ①若√a 2+b 2=1,则直线参数方程为标准参数方程; ②若√a 2+b 2≠1,可把它化为标准形式:{x =x 0+√a 2+b 2′y =y 0+√a 2+b 2′ (t ′为参数方程).此时参数t ′才有如前所说的几何意义. 3.圆的参数方程圆的圆心为O (a ,b ),半径为r 的圆的参数方程为: ⎩⎪⎨⎪⎧x =a +r cos t ,y =b +r sin t (t 为参数). 4.椭圆的参数方程椭圆x 2a 2+y 2b 2=1(a >b >0)的参数方程为:⎩⎪⎨⎪⎧x =a cos θ,y =b sin θ (θ为参数).规定θ的范围为θ∈[0,2π). 5.双曲线的参数方程双曲线x 2a 2-y 2b 2=1的参数方程为:⎩⎪⎨⎪⎧x =a sec φ,y =b tan φ(φ为参数).规定φ的范围为φ∈[0,2π),且φ≠π2,φ≠3π2.6.抛物线的参数方程抛物线y 2=2px (p >0)的参数方程为:⎩⎪⎨⎪⎧x =2pt 2,y =2pt (t 为参数,t ∈R)其中p 为正的常数.这是焦点在x 轴正半轴上的抛物线参数方程.二、 极参第二问方法1. 直参圆普(利用“t ”的几何意义)①直线:直线化标准参数方程②曲线:曲线化普通方程③联立①②④韦达定理题型1:|PA |+|PB |={|t A −t B | t A ∙t B <0|t A +t B | t A ∙t B >0题型2:|PA |∙|PB |=|t A ∙t B |题型3:|AB |=|t A −t B |题型4:1|PA |+1|PB |=|PA |+|PB ||PA |∙|PB |2. 圆参直普(求范围/最值)①曲线:曲线化参数方程②直线(曲线):直线化普通方程(曲线化参数方程) ③由曲线参数方程设动点坐标题型1:目标函数型:点代入目标式子求取值范围 题型2:点到直线距离型:点代入点到直线距离公式 d =00√A 2+B 2题型3:两点距离型:代入两点距离公式|AB |=√(x 1−x 2)2+(y 1−y 2)23. 极极联立①直线与曲线均化为极坐标方程②联立极坐标方程求交点极坐标③利用极径与夹角几何意义题型1:直线过原点|AB|=|ρA−ρB|(0、A、B三点共线)题型2:两曲线同时过原点题型3:点在曲线上,由夹角设点坐标。
极坐标系的概念
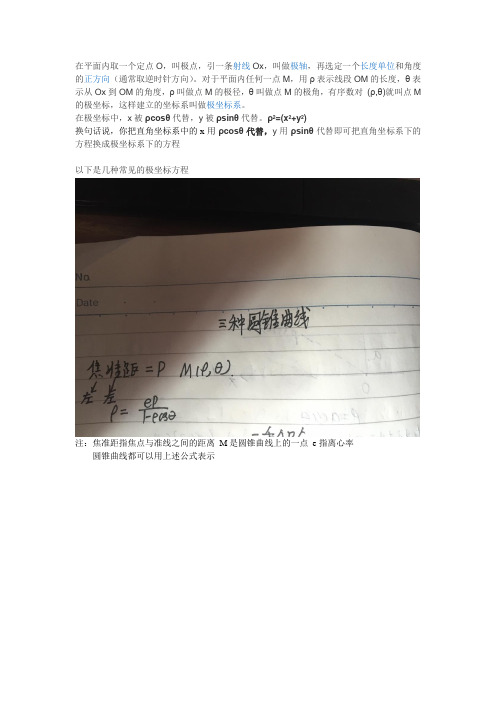
在平面内取一个定点O,叫极点,引一条射线Ox,叫做极轴,再选定一个长度单位和角度的正方向(通常取逆时针方向)。
对于平面内任何一点M,用ρ表示线段OM的长度,θ表示从Ox到OM的角度,ρ叫做点M的极径,θ叫做点M的极角,有序数对(ρ,θ)就叫点M 的极坐标,这样建立的坐标系叫做极坐标系。
在极坐标中,x被ρcosθ代替,y被ρsinθ代替。
ρ2=(x2+y2)
换句话说,你把直角坐标系中的x用ρcosθ代替,y用ρsinθ代替即可把直角坐标系下的方程换成极坐标系下的方程
以下是几种常见的极坐标方程
注:焦准距指焦点与准线之间的距离M是圆锥曲线上的一点e指离心率圆锥曲线都可以用上述公式表示。
直角坐标和极坐标互化公式

直角坐标和极坐标互化公式1. 引言在数学中,直角坐标和极坐标是两种常用的坐标系统。
直角坐标系统使用水平轴和垂直轴来确定点的位置,而极坐标系统使用极径和极角来表示点的位置。
在实际问题中,有时候我们需要在直角坐标和极坐标之间进行转换。
为了方便求解,我们需要了解两种坐标系之间的互化公式,即通过公式可以将一个点的坐标从直角坐标系转换到极坐标系,或者从极坐标系转换到直角坐标系。
本文将介绍直角坐标和极坐标之间的互化公式,为读者提供方便、简洁的转换方法。
2. 直角坐标转换为极坐标给定一个点在直角坐标系中的坐标(x,y),我们可以通过以下公式将其转换为极坐标系下的坐标$(r,\\theta)$:1.极径r的计算公式如下:$$r=\\sqrt{x^2+y^2}$$其中,r表示点到原点的距离。
2.极角 $\\theta$ 的计算公式如下:$$\\theta=\\arctan\\left(\\frac{y}{x}\\right)$$其中,$\\theta$ 表示点与正半轴的夹角。
3.特殊情况下,需要特别注意的是:–当x>0且y=0时,$\\theta = 0$–当x<0且y=0时,$\\theta = \\pi$–当x=0且y>0时,$\\theta = \\frac{\\pi}{2}$–当x=0且y<0时,$\\theta = -\\frac{\\pi}{2}$–当x=0且y=0时,$\\theta$ 无定义通过上述公式,我们可以实现直角坐标系到极坐标系的转换。
下面是一个示例:假设有一个点A在直角坐标系中的坐标是(3,4),我们可以使用上述公式计算该点在极坐标系中的坐标。
首先,计算极径r:$$r = \\sqrt{3^2+4^2} = 5$$然后,计算极角 $\\theta$:$$\\theta = \\arctan\\left(\\frac{4}{3}\\right) = 0.93$$因此,点A在极坐标系中的坐标为(5,0.93)。
直角坐标系和极坐标系的转化公式
直角坐标系和极坐标系的转化公式1. 直角坐标系和极坐标系的定义直角坐标系是一种由两条互相垂直的直线构成的坐标系统。
它以固定的原点为中心,沿着两条垂直的轴线(通常为横轴和纵轴)进行测量。
在直角坐标系中,一个点的位置可以用两个坐标值(x 和 y)来表示,分别表示其在横轴和纵轴上的距离。
极坐标系是另一种常用的坐标系,它使用一个点到某个固定点的距离(称为极径)和该点到某个固定方向的角度来表示点的位置。
在极坐标系中,原点通常被称为极点,固定方向通常被称为极轴。
2. 直角坐标系转化为极坐标系要将一个点的直角坐标系表示转化为极坐标系表示,我们可以利用以下的公式:r = \\sqrt{x^2 + y^2}其中,r 表示点到极点的距离,即极径。
公式通过使用点在横轴和纵轴上的坐标值,计算出该点到极点的距离。
另外一个要计算的值是点到极轴的角度,我们可以使用以下的公式:\\theta = \\arctan\\left(\\frac{y}{x}\\right)其中,θ 表示点到极轴的角度。
公式通过使用点在横轴和纵轴上的坐标值,计算出该点到极轴的角度。
3. 极坐标系转化为直角坐标系要将一个点的极坐标系表示转化为直角坐标系表示,我们可以利用以下的公式:x = r \\cos(\\theta)y = r \\sin(\\theta)其中,r 表示点到极点的距离,θ 表示点到极轴的角度。
公式通过使用极径和角度值,计算出该点在直角坐标系中的位置。
4. 小结直角坐标系和极坐标系是常用的坐标系统,用于表示平面上的点的位置。
通过将直角坐标系转化为极坐标系,或者将极坐标系转化为直角坐标系,我们可以在不同的坐标系下方便地表示点的位置。
转化公式为:•直角坐标系转化为极坐标系:–r = \sqrt{x^2 + y^2}–\theta = \arctan\left(\frac{y}{x}\right)•极坐标系转化为直角坐标系:–x = r \cos(\theta)–y = r \sin(\theta)以上是直角坐标系和极坐标系之间转化的公式,可以帮助我们在需要的时候方便地进行坐标系之间的转换操作。