模糊控制系统仿真实验
洗衣机模糊控制仿真实验报告
洗衣机模糊控制仿真实验报告一、实验目的本实验旨在通过对洗衣机运行过程的模糊控制仿真实验,帮助学生更好地了解模糊控制的基本原理和实现方法。
二、实验原理洗衣机模糊控制系统主要包括模糊控制器、模糊推理机和输出规则等三个部分。
模糊控制器是模糊系统的核心部分,其主要作用是将输入信号转化为模糊集,并将控制输出信号转化为真实输出信号。
模糊控制器的输入为洗衣机工作状态的一些参数,例如水位、温度等,输出为洗衣机运行状态的一些控制命令,例如加热、搅拌等。
模糊推理机是由一系列规则组成的系统,它负责根据输入的模糊集和一组先验规则,进行模糊推理,得到控制输出信号的模糊集,即模糊控制器的中间变量。
输出规则主要为控制输出信号的模糊集赋值,即将模糊集中各个元素映射到真实输出信号的取值范围内。
三、实验步骤1、建立洗衣机的模糊控制系统模型,包括模糊控制器、模糊推理机和输出规则等。
2、设置洗衣机的运行参数,例如水位、温度等,作为模糊控制器的输入。
3、根据洗衣机的运行状态,制定一组先验规则,作为模糊推理机的输入,并进行模糊推理。
4、根据模糊推理得到的控制输出信号的模糊集,进行输出规则的映射,得到洗衣机的真实控制命令。
5、根据洗衣机的控制命令,模拟洗衣机的工作流程。
6、对洗衣机的工作流程进行仿真实验,并记录实验结果。
四、实验结果分析经过多次实验,得到了洗衣机的模糊控制系统的优化参数,能够实现洗衣机的良好控制。
通过对实验结果的分析,可以发现,模糊控制系统可以有效地调节洗衣机的运行状态,使其在不同的工作状态下保持稳定且高效的运行。
同时,模糊控制系统也具有很强的适应性和鲁棒性,可以自适应地调节参数,应对各种不同的运行环境。
五、实验总结本实验通过模拟洗衣机的工作流程,对模糊控制系统的基本原理和实现方法进行了深入探究,能够有效地帮助学生掌握模糊控制系统的设计和应用方法。
同时,在实验过程中,也需要注意对实验数据和结论的分析和总结,以便更好地优化模糊控制系统的参数和性能,实现最佳控制效果。
在线推理法模糊控制器实验报告
在线推理式模糊逻辑控制器设计实验报告学院:电力学院专业:自动化学号:姓名:时间:2013年11月16日一、实验目的利用Matlab软件实现模糊控制系统仿真实验,了解模糊控制的在线推理方法的基本原理及实现过程。
二、实验要求以matlab模糊工具箱中提供的一个水位模糊控制系统仿真的实例,定义语言变量的语言值,设置隶属度函数,根据提供的规则建立模糊逻辑控制器。
最后启动仿真,观察水位变化曲线。
三、实验步骤叙述在线推理模糊控制的仿真的主要步骤。
1)在matlab命令窗口输入:sltank,打开水位控制系统的simulink仿真模型图,如图;2)在matlab的命令窗口中,输入指令:fuzzy,便打开了模糊推理系统编辑器(FIS Editor),如图;3)利用FIS Editor编辑器的Edit/Add variable/input菜单,添加一条输入语言变量,并将两个输入语言和一个输出语言变量的名称分别定义为:level;rate;valve。
其中,level代表水位(三个语言值:低,高,正好),rate代表变化率(三个语言值:正,不变,负),valve代表阀门(五个语言变量:不变,迅速打开,迅速关闭,缓慢打开,缓慢关闭);4)①利用FIS Editor编辑器的Edit/membership function菜单,打开隶属度函数编辑器,如下图,将输入语言变量level的取值范围(range)和显示范围(display range)设置为[-1,1],隶属度函数类型(type)设置为高斯型函数(gaussmf),而所包含的三条曲线的名称(name)和参数(parameters)([宽度中心点])分别设置为:high,[0.3 -1];okay [0.3 0];low [0.3 1]。
其中high 、okay、low分别代表水位高、正好、低;②将输入语言变量rate的取值范围(range)和显示范围(display range)设置为[-0.1,0.1],隶属度函数类型(type)设置为高斯型函数(gaussmf),而所包含的三条曲线的名称(name)和参数(parameters)([宽度中心点])分别设置为:negative,[0.03 -0.1];none [0.03 0];positive [0.03 0.1]。
模糊控制系统课件4.4(FIS的设计与仿真)

坐标区
网格,可 填入3-100 之间的数 字
主菜单Options之下有两个子菜单:Plot(画图) 和Color Map(填色),都是关于绘图的。
实验一:用GUI设计Mamdani型FIS
洗衣机利用分光光度计传感器,通过检测洗涤液的
透明程度等方法,测出洗涤液中的污泥含量x∈[0,100]% 和油脂含量y∈[0,100]%。模糊控制规则根据x和y的数 据,选定洗涤时间t∈[0,60](分钟)。因为只考虑洗涤时 间,可以用双输入-单输出模糊控制器完成任务。
4.4 FIS的设计与仿真
启动MATLAB后,在主窗口键入fuzzy,回车。
模糊子集
把模糊推理系统改成T-S(Sugeno)型: File→New FIS…→Sugeno
线性函数
这两个编辑 框不允许填 入内容
相当于Mamdani推理中的蕴涵、综合、清晰化 三者的综合结果
模糊规则编辑器
以液位控制系统为例。
④if level is okay and rate is positive then valve is close slow
⑤if level is okay and rate is negative then valve is open slow 根据上述模糊规则,编辑这个“液位模糊控制器” 的仿真模型。
实验二:用GUI设计Sugeno型FIS
例:双输入(x和y)、单输出(u)系统,四条 模糊规则。
R1 : if R2 : if R3 : if R4 : if
x is x1 then u1 x 1; x is x2 and y is y1 then u 2 0.1x 4 y 1.2; x is x2 and y is y2 then u3 0.9 x 0.7 y 9; x is x3 and y is y2 then u4 0.2 x 0.1 y 0.2
模糊控制基本实验

1假设一个双输入/单输出系统,输入X∈[-5,5]和Y ∈[-10,10]模糊化成三级:负、零、正,输出Z ∈[-5,5]模糊化成五级:负大、负小、零、正小、正大。
模糊规则表如下所示。
适当选择隶属度函数后,设计一个基于Mamdani模型的模糊推理系统,绘制出输入/输出曲线,并计算当X和Y分别为-3和5以及-2和-7时输出Z的大小。
图1:输入变量X范围及隶属度函数曲线
图2:输入变量Y范围及隶属度函数曲线
图3:输出变量Z范围及隶属度函数曲线
图4:输入输出变量三维曲面图
图5:输入变量X=-3,Y=5时输出变量Z值
图6:输入变量X=-5,Y=-9时输出变量Z 值
2.查找相关文献,设计能跟踪给定输入的模糊控制器,假设系统模型如下:
其中K=30, T1=10, T2=40, Td=2。
(用simulink 搭建系统,对系统进行仿真,给
出系统的阶跃响应曲线)
图7:模糊控制经验规则
)
1)(1()(21s T s T Ke s G s
T d ++=
-
图8:E和EC的范围及隶属度函数曲线
图9:输出变量u的范围及隶属度函数
图10:模糊控制规则
图10:模糊控制规则观察表
图11:输入输出变量三维曲面图
图12:simulink仿真电路图
其中,经过多次试探,当K1=2.4,K2=0.65,K3=1.15时,仿真效果较好。
图13:系统单位阶跃响应输出曲线图。
实验报告
实验一基于Matlab的单容液位模糊控制系统仿真一、实验目的1、熟悉Matlab基础知识和模糊推理系统编辑器。
2、加深对模糊控制的理解。
3、加强模糊控制在实践中的应用。
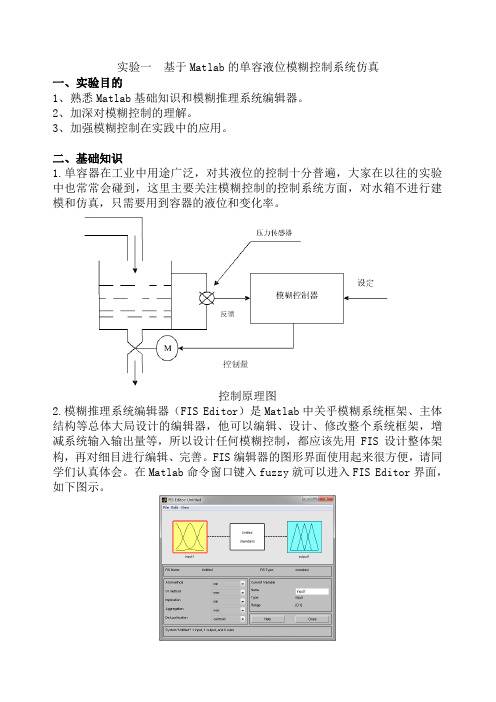
二、基础知识1.单容器在工业中用途广泛,对其液位的控制十分普遍,大家在以往的实验中也常常会碰到,这里主要关注模糊控制的控制系统方面,对水箱不进行建模和仿真,只需要用到容器的液位和变化率。
控制原理图2.模糊推理系统编辑器(FIS Editor)是Matlab中关乎模糊系统框架、主体结构等总体大局设计的编辑器,他可以编辑、设计、修改整个系统框架,增减系统输入输出量等,所以设计任何模糊控制,都应该先用FIS设计整体架构,再对细目进行编辑、完善。
FIS编辑器的图形界面使用起来很方便,请同学们认真体会。
在Matlab命令窗口键入fuzzy就可以进入FIS Editor界面,如下图示。
图1三、实验内容1.打开模糊逻辑工具箱的图形界面,新建一个Mamdani模糊推理模型。
键入fuzzy打开图形界面,默认即为Mamdani模型。
2.增加一个输入变量,将输入变量命名为level、rate,输出变量为valve,这样就定义了两输入单输出模糊推理系统,保存为tank0.fis。
3.设计模糊化模块:将输入变量rate的论域设为[-0.1,0.1],另外两个变量采用默认论域[-1,1]不变。
通过增加隶属度函数来划分模糊空间:(1)输入变量level划分三个模糊集:low、okay和high,隶属度函数均为高斯函数,参数分别为[0.3 -1]、[0.3 0]、[0.3 1]。
(2)输入变量rate划分三个模糊子集:negative、zore和positive,隶属度函数均为高斯函数,参数分别[0.03 -0.1]、[0.03 0]、[0.03 1]。
(3)输出变量valve划分为五个模糊集:close_fast、close_slow、no_change、open_slow和open_fast,隶属度函数均为三角形函数,参数分别为[-1 -0.9-0.8]、[-0.6 -0.5 -0.4]、[-0.1 0 0.1]、[0.2 0.3 0.4 ]、[0.8 0.9 1]。
模糊控制实例及simulink仿真实验报告
模糊控制实例及simulink仿真实验报告
一、背景介绍
模糊控制是一种基于模糊逻辑的控制方法,其优点在于可以很好地处理复杂的非线性和不确定性系统,而且不需要精确的数学模型和计算,能够快速实现控制的优化。
二、实例介绍
本次实例采用一个双轮小车为对象,实现小车在平面上向指定位置运动的控制。
通过小车的速度和转向角两个输入变量,输出一个模糊控制信号,控制小车前进和转向。
三、实验过程
1. 建立模糊控制系统模型
打开Simulink软件,建立一个新模型,模型中包括输入变量、输出变量和控制器。
2. 设计输入变量和输出变量
(1)设计输入变量
本实例选择小车速度和转向角两个输入变量,每个变量包含三个模糊集合,速度变量分别为“慢速”、“中速”、“快速”,转向角变量分别为“左转”、“直行”、“右转”。
(2)设计输出变量
模糊控制信号输出变量选择小车的前进和转向,每个变量包含三个模糊集合,分别为“慢行”、“中行”、“快行”、“左转”、“直行”、“右转”。
3. 建立控制器
建立模糊控制器,包含输入变量和输出变量的关系,建立控制规则库和模糊关系。
4. 仿真实验
在Simulink下进行仿真实验,调整控制器参数,观察小车运动状态,对比试验。
四、实验结果
经过多次试验和调整,得到最优的小车模糊控制参数,可以实现小车的平滑运动
和准确转向。
五、实验结论
本实验通过建立一个小车的模糊控制系统,可以有效实现小车的平滑运动和准确转向,控制效果优于传统的PID控制方法。
模糊控制可以很好地处理非线性、不确定性和模糊性的系统,适合许多需要快速优化控制的场合。
《2024年电液伺服系统模糊PID控制仿真与试验研究》范文
《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业自动化技术的飞速发展,电液伺服系统作为重要组成部分,在众多领域中发挥着重要作用。
然而,由于电液伺服系统存在非线性、时变性和不确定性等特点,其控制问题一直是研究的热点和难点。
传统的PID控制方法在面对复杂多变的环境时,往往难以达到理想的控制效果。
因此,本文提出了一种基于模糊PID控制的电液伺服系统控制策略,并进行了仿真与试验研究。
二、电液伺服系统概述电液伺服系统主要由液压泵、液压马达、传感器和控制器等部分组成。
它利用电信号驱动液压系统工作,实现对负载的精确控制。
由于其具有高精度、快速响应等特点,在机械制造、航空航天、船舶等领域得到了广泛应用。
然而,由于电液伺服系统的复杂性,其控制问题一直是研究的重点。
三、模糊PID控制策略针对电液伺服系统的特点,本文提出了一种模糊PID控制策略。
该策略结合了传统PID控制和模糊控制的优点,通过引入模糊逻辑对PID参数进行在线调整,以适应系统参数的变化和环境干扰。
模糊PID控制策略能够在保证系统稳定性的同时,提高系统的响应速度和抗干扰能力。
四、仿真研究为了验证模糊PID控制策略的有效性,本文进行了仿真研究。
首先,建立了电液伺服系统的数学模型和仿真模型。
然后,分别采用传统PID控制和模糊PID控制对模型进行仿真实验。
通过对比两种控制策略的响应速度、稳态精度和抗干扰能力等指标,发现模糊PID控制在电液伺服系统中具有更好的性能。
五、试验研究为了进一步验证模糊PID控制策略的实用性,本文进行了试验研究。
在试验过程中,首先搭建了电液伺服系统的试验平台,然后分别采用传统PID控制和模糊PID控制对实际系统进行控制。
通过对比两种控制策略的试验结果,发现模糊PID控制在电液伺服系统中具有更高的稳态精度和更快的响应速度。
此外,在面对环境干扰时,模糊PID控制也表现出更强的抗干扰能力。
六、结论本文通过对电液伺服系统的模糊PID控制进行仿真与试验研究,验证了该策略的有效性。
模糊控制系统的建模与仿真设计方法
模糊控制系统的建模与仿真设计方法摘要:模糊控制系统是一种基于模糊逻辑的控制方法,广泛应用于工业控制、自动驾驶等领域。
本文介绍了模糊控制系统的基本原理,详细讨论了建模与仿真设计的方法,包括输入输出的模糊集合划分、规则库的构建、模糊推理与输出解模糊等关键步骤,并通过实例分析验证了方法的有效性。
1. 引言模糊控制系统是一种使用模糊逻辑进行决策和控制的方法,相较于传统的精确控制方法,具有更强的适应性和鲁棒性。
在实际应用中,模糊控制系统已被广泛运用于工业控制、自动驾驶等各个领域。
为了设计高性能的模糊控制系统,合理的建模与仿真设计方法至关重要。
2. 模糊控制系统的建模建模是模糊控制系统设计的第一步,其目的是将实际控制问题转化为模糊集合及其规则库的形式,方便进行模糊推理。
模糊控制系统的建模过程一般包括以下几个步骤:2.1 输入输出模糊集合划分对于待控制的对象,需要对输入和输出的变量进行模糊化,即将实际输入输出的连续取值划分为若干个模糊集合。
划分过程可以基于专家知识或实际数据,常用的划分方法包括三角法、梯形法和高斯法等。
2.2 规则库的构建规则库是模糊控制系统的核心,其中包含了模糊控制的知识和经验。
规则库的构建需要依据专家知识或经验,并将其转化为一系列模糊规则的形式。
每条规则一般由若干个模糊集合的条件和一个模糊集合的结论组成。
2.3 模糊推理通过将实际输入值映射到对应的模糊集合上,利用推理方法将输入与规则库中的规则进行匹配,得到模糊输出。
常用的推理方法包括最大值法、加权平均法和模糊积分法等。
2.4 输出解模糊由于模糊输出是一个模糊集合,需要对其进行解模糊得到具体的输出。
常用的解模糊方法包括最大值法、面积平衡法和最大隶属度法等。
3. 模糊控制系统的仿真设计模糊控制系统的仿真设计是为了验证所设计的模糊控制系统在实际情况下的性能。
仿真设计通常包括以下步骤:3.1 系统建模根据实际控制对象的特性,将其建模为数学模型,包括输入与输出的关系、系统的动态特性等。
模糊控制MALTAB系统仿真实验报告
模糊控制MALTAB系统仿真实验报告可编程控制器智能控制技术仿真实验题目: 模糊控制系统MATLAB仿真实验报告院系名称:电气工程学院专业班级:电气学生姓名:学号:模糊控制系统MATLAB仿真实验报告一、实验目的 1、通过本次设计,了解模糊控制的基本原理、模糊模型的建立和模糊控制系统的设计过程。
2、熟悉在MATLAB下建立模糊控制器的方法,并能利用MATLAB对给定参数的模糊控制系统予以仿真二、实验项目1、实验题目本设计要求设计一个采用模糊控制的加热炉温度控制系统。
被控对象为一热处理工艺过程中的加热炉,加热设备为三相交流调压供电装置,输入控制信号电压为0~5V,输出相电压0~220V,输出最大功率180KW,炉温变化室温~625℃,电加热装置如图所示:图1-1电加热装置示意图3、实验数据:本实验输入变量为偏差e和偏差的变化ec,输出变量为控制电压U,变量模糊集量化论域均为[-6 6]采用的常用的三角形隶属函数。
控制规则表: U 输入变量ec NB NM NS ZO PS PM PB 输入变量 e NB NB NB NB NB NM NS ZO NM NB NB M, M, MS ZO ZO NS NV NM NM NS ZO ZO PS ZO NM NS NS ZO PS PS PM PS NS ZO ZO PS PM PM PB PM ZO ZO PS PM PM PB PB PB ZO PS PM PB PB PB PB 三、实验步骤 1、建立系统仿真图:在MATLAB主窗口单机工具栏中的Simulink快捷图标弹出“Simulink Library Browser”窗口,单击“Create a new model”快捷图标弹出模型编辑窗口。
依次将Signal Generator(信号源)、Subtract(减运算)、Gain(增益)、Derivative(微分)、Mux(合成)、Fuzzy Logic Controller(模糊逻辑控制器)、TransferFcn(传递函数)、Saturation(限幅)、Memory(存储器)、Scope(显示器)模块拖入窗口并连接成系统仿真图如图1-2 图1-2 系统仿真图 2、在模糊推理系统编辑器中设置变量:在MATLAB 命令窗口输入fuzzy并按回车键,启动FISEditor(模糊推理系统编辑器)。
模糊PID控制实验报告
编号:实验一普通PI控制方法的设计与实现一、实验目的1. 掌握数字PI及其算法的实现2. 熟悉在在keil环境下进行单片机程序的设计3. 熟悉仿真软件protues的使用二、实验设备及条件1. 计算机系统2. 编程软件keil4和仿真软件protues7.8三、实验原理及其实验步骤(1) PID算法的数字化实现在模拟系统中,PID算法的表达式为u(t)=K P[e(t)+1T I∫e(t)dt+T Dde(t)dt]式中u(t):调节器的输出信号;e(t):调节器的偏差信号,它等于测量值与给定值之差;Kp:调节器的比例系数;T I:调节器的积分时间;TD:调节器的微分时间;离散化的PID为:u(k)=K P[e(k)+TT I∑e(j)kj=0+T DT(e(k)−e(k−1))]Δt=T:采样周期,必须使T足够少,才能保证系统有一定的精度;E(k):第K次采样时的偏差值;E(k-1) :第K-1次采样时的偏差值;K:采样序号,K=0,1,2……;P(k-1):第K次采样时调节器的输出;上式计算复杂,经过化简为:u(k)=u(k−1)+K P[e(k)−e(k−1)]+K I e(k)+K D[e(k)−2e(k−1)+e(k −2)]式中:K I=K P TT I为积分系数K D=K P T DT为微分系数要计算第K次输出值u(k),只需要知道u(k-1),e(k),E(k-1),e(k-2)即可。
上式也称为位置型PID的位置控制算法。
在很多控制系统中,由于执行机构是采用布进电机进行控制,所以只要给一个增量信号即可。
因此得到增量型PID的位置控制算法。
∆u=K P[e(k)−e(k−1)]+K I e(k)+K D[e(k)−2e(k−1)+e(k−2)] (2) 控制系统的结构框图整个系统的控制框图如下所示:图1 PID控制系统结构框图在本次设计中,经过计算,被控对象的传递函数是:G(s)=1 (SCR)2+3SCR+1其中:C=10uf,R=20K;带入上式后可得:G(s)=10.04S2+0.6S+1显然是一个二阶系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
华侨大学厦门工学院《智能控制技术》实验报告专业:电气工程及其自动化班级:时间:年月日~年月日―――――――以下指导教师填写―――――分项成绩:出勤设计报告总成绩:指导教师:目录摘要 (1)一、设计的目的 (2)二、设计要求 (2)三、设计过程 (3)1.系统模型建立 (3)2.模糊控制器设计 (3)2.1 模糊集合及论域的定义 (3)2.2模糊控制规则设计 (6)2.3系统的参数选择 (7)2.4仿真结果 (7)四、设计分析 (9)1.改变模糊控制隶属度函数对控制效果的影响 (9)2.给系统模型加扰动对控制效果的影响 (12)3.改变系统的参数对控制效果的影响 (13)五、模糊控制的优点 (15)六、总结 (15)致谢 (16)参考文献 (16)摘要模糊控制的研究主要体现在控制器的研究和开发以及各类实际应用中, 目前模糊控制已经应用在各个行业。
各类模糊控制器也非常多, 模糊控制器的研究一直是控制界研究的热点问题, 而关于模糊控制系统的稳定性分析则是模糊控制需要研究和解决的基本问题。
目前已经出现了为实现模糊控制功能的各种集成电路芯片。
用MATLAB软件实现模糊控制系统的仿真结果,仿真结果表明MATLAB软件不但简单实用,而且响应速度快,超调量小,控制效果良好。
关键词:模糊控制仿真 MATLAB设计目标说明一、设计的目的:1. 通过本次设计,进一步了解模糊控制的基本原理、模糊模型的建立和模糊控制器的设计过程。
2. 提高学生有关控制系统的程序设计能力。
3. 熟悉Matlab 语言以及在智能控制设计中的应用。
二、设计要求:图1 模糊控制系统Simulink 仿真模型图1、用Matlab 中的Simulink 工具箱,组成一个模糊控制系统。
任意带模糊控制器的系统均可,例如一简单二阶加纯滞后系统(图1所示)为,传递函数12()(1)(1)d sf f Ke G s T s T s τ-=++。
其中各参数分别为1240,10,60,2f f d K T T τ====。
2、采用模糊控制算法,设计出能跟踪给定输入的模糊控制器,对被控系统进行仿真,绘制出系统的阶跃响应曲线。
3、改变模糊控制器中模糊变量的隶属度函数,分析隶属度函数和模糊控制规则对模糊控制效果的影响。
比较那种情况下的控制效果较好。
4、给系统加上扰动,观察此时的阶跃响应曲线,看系统是否仍然稳定,并与无扰动情况下的阶跃响应曲线进行比较。
并比较模糊控制和PID 控制的鲁棒性。
5、改变系统的参数,了解模糊控制在系统参数发生变化时的控制效果。
并与PID 控制器作用下系统参数发生变化时的控制效果进行比较,思考模糊控制相对于传统控制的优点。
模糊控制下简单二阶系统研究一、设计过程:1.系统模型建立:2.模糊控制器设计2.1 模糊集合及论域的定义对误差E、误差变化率EC、控制量U的模糊集合及其论域定义如下:E、EC、U的模糊集合均为{NB、NM、NS、0、PS、PM、PB}E和EC的论域为{-6、-5、-4、-3、-2、-1、0、1、2、3、4、5、6}U的论域为{-7、-6、-5、-4、-3、-2、-1、0、1、2、3、4、5、6、7}上述3个模糊集合都选取了7个元素,主要目的是着眼于提高稳态精度。
E、EC和U 的隶属度函数图形如图所示:.2.2模糊控制规则设计模糊控制规则如下表所示:表1 模糊控制规则ENB NM NS 0 PS PM PB UECNB PS PS PS PS PM PB PB NM NS PS PS PS PM PM PB NS NM NS 0 0 PS PM PM 0 NB NM NS 0 PS PM PM PS NB NM NS 0 0 PS PMPM NB NB NM NS NS PS PS PB NBNBNMNS NSNSPS2.3系统的参数选择系统所选用的参数Saturation 、Saturation1、Saturation2的范围分别为[-6 6]、[-6 6]、[-7 7],Transport Delay=2s 。
通过调试得到PID 模糊控制的参数:Gain5=0.38,Gain4=0.5,Gain3=0.4。
2.4仿真结果:系统的阶跃响应曲线如图5所示,其中上方的曲线代表系统的阶跃响应,下方的曲线是系统的模糊控制量的变化。
图5 阶跃输入的响应曲线图本设计中控制系统性能的要求为:错误!未找到引用源。
,错误!未找到引用源。
, 错误!未找到引用源。
由图5中曲线可知: 27.2%30%p σ=< 符合要求错误!未找到引用源。
6880s s sτ=< 符合要求错误!未找到引用源。
5.2%6%ss e =< 符合要求图6、系统开环传函的bode图二、设计分析:1. 改变模糊控制隶属度函数对控制效果的影响如下图所示改变模糊控制器中的隶属度函数为梯形隶属函数。
图7 变量E的隶属度函数图8 变量EC的隶属度函数图9 变量U的隶属度函数此时系统的阶跃响应曲线为:图 10 系统的阶跃响应曲线由图10中曲线可知道:错误!未找到引用源。
27.5%pσ=错误!未找到引用源。
95s sτ=错误!未找到引用源。
10% sse=由以上的仿真结果可以看出梯形隶属度函数的系统性能没有三角形隶属度函数的系统性能好。
此时系统的超调量变大,上升时间增大,稳态误差变大。
2.给系统模型加扰动对控制效果的影响。
1、加扰动时的模型图如图11所示(其中step1为幅值为0.02的阶跃信号)。
图11 加扰动后的系统模型图2、系统的阶跃响应曲线为:图12 系统的阶跃响应曲线由图12中曲线可知道:错误!未找到引用源。
超调量变大错误!未找到引用源。
7580ss s τ=< 符合要求错误!未找到引用源。
2%6%ss e =< 稳态误差变小 3、分析:由数据可知,系统加上扰动之后,系统仍然是稳定的,系统性能指标变化不大,说明有着良好的鲁棒性。
究其原因,在Saturation2之前加的扰动,相当于被控制对象的输入量在对应时刻又并联了一个输入,从而在对应的各个时刻相当于K 增益变大;显而易见,K 的增大,有助于系统的稳定,但是会使超调量变大。
调整时间变小,与实验的结果是吻合的。
3.改变系统的参数对控制效果的影响。
(1)当系统开环增益k 分别取k=12,k=15和k=18时系统的阶跃响应如图13所示。
图13系统开环增益变化对系统阶跃响应的影响(2)当系统纯延时错误!未找到引用源。
分别取 1.8sτ=错误!未找到引用源。
、错误!未找到引用源。
和 2.2sτ=错误!未找到引用源。
时系统的阶跃响应如图14所示。
图14系统纯滞后时间变化对系统阶跃响应的影响(3)当系统惯性时间常数错误!未找到引用源。
分别取25T s=错误!未找到引用源。
、215T s=错误!未找到引用源。
和225T s=时系统的阶跃响应如图15所示。
图15系统较大的时间常数变化对系统阶跃响应的影响从图13可以看出增大K值,系统的上升时间减小,此时超调量稍有增加;从图14可以看出当系统的纯滞后时间增大时,系统的超调量增加较大。
从图15可以看出系统的惯性时间常数增大后使系统动态性能有所降低,当时间常数T2增大时上升时间增大,但超调量有所降低。
三、模糊控制的优点通过本设计可以知道,模糊控制是基于启发性的知识及语言决策规则设计的,这有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。
模糊控制系统的鲁棒性强,干扰和参数变化对控制效果的影响被大大减弱,尤其适合于非线性、时变及纯滞后系统的控制。
当然,模糊控制也有着自身的缺点:(1)信息简单的模糊处理将导致系统的控制精度降低和动态品质变差;( 2) 模糊控制的设计尚缺乏系统性, 无法定义控制目标。
四、总结模糊控制能较好的控制系统的输出,大幅度减小超调,调节时间等参数,使得系统能够更快、更稳、更准。
模糊控制的突出优点是能够比较容易的将人的控制经验融入到控制器中,但若缺乏这样的控制经验,很难设计出高水平的模糊控制器。
而且,由于模糊控制器采用了IF-THEN控制规则,不便于控制参数的学习和调整,使得构造具有自适应的模糊控制器较困难。
致谢在我自身的努力以及在老师和同学的帮助与指导下,顺利完成了这次课程设计,在这里我要对那些给予我们帮助的老师和同学表示衷心的感谢。
参考文献[1]刘金琨.先进PID 控制MATLAB 仿真[M].北京: 电子工业出版社,2004.[2]王正林,王胜开,陈国顺.MA TLAB/Simulink与控制系统仿真[M].北京:电子工业出版社,2005.[3]齐京礼,边永青,郑伟平,等. 基于自适应模糊P ID 控制器的温度控制系统[ J ]. 微计算机信息, 2008, 24 ( 9) : 74[4]刘曙光,魏俊民,竺志超. 模糊控制技术[M]. 北京:中国纺织出版社, 2001.[5]王振宇, 成立. 基于模糊控制的温室调节装置的研究[J]. 浙江大学学报: 农业与生命科学版, 2006, 32( 2).。