控制系统仿真实验报告1
控制系统仿真综合实验报告

图 2-1
校正前系统阶跃响应曲线
可以看出原系统的响应速度非常慢, 所以要通过校正来改善系统的动态性能, 可以采用串联超前校正。 原系统为Ⅰ型系统,容易求出系统的速度误差系数为
K lim
s 0
s 400 2 s ( s 30 s 200)
2
根据实验要求速度误差系数为 10 ,那么 KV 10 / 2 5 ,此时系统的开环 传函为: G s
5 400 ,用 MATLAB 计算得相角裕量为 32.6°,由于采 s s 30 s 200
2
用串联超前校正能够增大系统的相角裕量,所以综合考虑,采用串联超前校正。 2. 经过第一步的分析,采用串联校正,可以计算出串联校正装置传递函数为 5 (1 0.12 s ) ,因此校正后的开环传递函数为: 1 0.048s
K Ess Overshoot(%) Ts(s) 5 0.2857 34.6099 4.7766
表1
8 0.20000 43.5125 5.6730
9 0.1818 45.7812 5.5325
12 0.1429 51.6704 5.7655
不同 K 值下系统响应的参数
(四)实验结果与分析 从理论上分析,系统的传递函数为 G s
ulxxlgxx?????????????????????????????????????????????????????????????????4301004300100000000010????uxxxy????????????????????????????????????0001000001???实际系统摆杆转动轴心到杆质心的长度为l025m则系统的状态方程为
(二)实验要求 1. 使用 Matlab 进行仿真; 2. 分析不同 K 值的情况下,系统的单位阶跃响应曲线,并绘图进行比较; 3. 列表对系统响应各性能进行比较,并确定你认为合适的参数值。 (三)实验内容及步骤 1.运行 MATLAB,进行仿真实验。
MATLAB与控制系统仿真实验报告

MATLAB与控制系统仿真实验报告第一篇:MATLAB与控制系统仿真实验报告《MATLAB与控制系统仿真》实验报告2013-2014学年第 1 学期专业:班级:学号:姓名:实验三 MATLAB图形系统一、实验目的:1.掌握绘制二维图形的常用函数。
2.掌握绘制三维图形的常用函数。
3.熟悉利用图形对象进行绘图操作的方法。
4.掌握绘制图形的辅助操作。
二、实验原理:1,二维数据曲线图(1)绘制单根二维曲线plot(x,y);(2)绘制多根二维曲线plot(x,y)当x是向量,y是有一维与x同维的矩阵时,则绘制多根不同颜色的曲线。
当x,y是同维矩阵时,则以x,y对应列元素为横、纵坐标分别绘制曲线,曲线条数等于矩阵的列数。
(3)含有多个输入参数的plot函数plot(x1,y1,x2,y2,…,xn,yn)(4)具有两个纵坐标标度的图形plotyy(x1,y1,x2,y2)2,图形标注与坐标控制1)title(图形名称);2)xlabel(x轴说明)3)ylabel(y轴说明)4)text(x,y图形说明)5)legend(图例1,图例2,…)6)axis([xmin xmax ymin ymax zmin zmax])3, 图形窗口的分割 subplot(m,n,p)4,三维曲线plot3(x1,y1,z1,选项1,x2,y2,选项2,…,xn,yn,zn,选项n)5,三维曲面mesh(x,y,z,c)与surf(x,y,z,c)。
一般情况下,x,y,z是维数相同的矩阵。
X,y是网格坐标矩阵,z是网格点上的高度矩阵,c用于指定在不同高度下的颜色范围。
6,图像处理1)imread和imwrite函数这两个函数分别用于将图象文件读入matlab工作空间,以及将图象数据和色图数据一起写入一定格式的图象文件。
2)image和imagesc函数这两个函数用于图象显示。
为了保证图象的显示效果,一般还应使用colormap函数设置图象色图。
控制系统数字仿真实验报告
function dy = vdp(t,y)
dy=[y-2*t/y];
end
2.脚本m文件ode.m
[t,y]=ode45('vdp',[0 1],1);
plot(t,y);
xlabel('t');
ylabel('y');
3.运行
(二)试用四阶RK法编程求解下列微分方程初值问题。仿真时间2s,取步长h=0.1。
type=i;
[sysc,Kp,Ti,Td]=pidmargin(sys,type);
sysopen=sysc*sys;
sysclose=feedback(sysopen,1);
sysgroup=append(sysgroup,sysclose);
end
clf
for i=1:4
subplot(2,2,i)
Ti=0.5*Tcr
Td=0.12*Tcr
sysc=Kp*(1+tf(1,[Ti,0])+tf([Td 0],1));
end
end
编写脚本m文件:
clf
sys=tf([500 5000],[1 33 337 1775 4950 5000]);
sysgroup=feedback(sys,1);
for i=1:3
实验三PID控制器设计
一、实验目的
1.了解PID控制原理,掌握相应PID控制器设计仿真程序的应用;
2.掌握计算机辅助系统瞬态性能指标的计算;
3.掌握计算机辅助系统频率性能分析;
二、实验环境
网络计算机系统,MATLAB语言环境
三、实验内容
1.已知如图所示单位反馈系统
自控仿真实验报告

一、实验目的1. 熟悉MATLAB/Simulink仿真软件的基本操作。
2. 学习控制系统模型的建立与仿真方法。
3. 通过仿真分析,验证理论知识,加深对自动控制原理的理解。
4. 掌握控制系统性能指标的计算方法。
二、实验内容本次实验主要分为两个部分:线性连续控制系统仿真和非线性环节控制系统仿真。
1. 线性连续控制系统仿真(1)系统模型建立根据题目要求,我们建立了两个线性连续控制系统的模型。
第一个系统为典型的二阶系统,其开环传递函数为:\[ G(s) = \frac{1}{(s+1)(s+2)} \]第二个系统为具有迟滞环节的系统,其开环传递函数为:\[ G(s) = \frac{1}{(s+1)(s+2)(s+3)} \](2)仿真与分析(a)阶跃响应仿真我们对两个系统分别进行了阶跃响应仿真,并记录了仿真结果。
(b)频率响应仿真我们对两个系统分别进行了频率响应仿真,并记录了仿真结果。
(3)性能指标计算根据仿真结果,我们计算了两个系统的性能指标,包括上升时间、超调量、调节时间等。
2. 非线性环节控制系统仿真(1)系统模型建立根据题目要求,我们建立了一个具有饱和死区特性的非线性环节控制系统模型。
其传递函数为:\[ W_k(s) = \begin{cases}1 & |s| < 1 \\0 & |s| \geq 1\end{cases} \](2)仿真与分析(a)阶跃响应仿真我们对非线性环节控制系统进行了阶跃响应仿真,并记录了仿真结果。
(b)相轨迹曲线绘制根据仿真结果,我们绘制了四条相轨迹曲线,以分析非线性环节对系统性能的影响。
三、实验结果与分析1. 线性连续控制系统仿真(a)阶跃响应仿真结果表明,两个系统的性能指标均满足设计要求。
(b)频率响应仿真结果表明,两个系统的幅频特性和相频特性均符合预期。
2. 非线性环节控制系统仿真(a)阶跃响应仿真结果表明,非线性环节对系统的性能产生了一定的影响,导致系统响应时间延长。
控制系统仿真实验报告一
end
figure(1)
plot([0:hStep:nCounter*hStep]',Hlevel)
Grid
2、函数文件
functionNewX=my_wsh(h,t0,x0,u0)
K1=l_2(t0,x0,u0);
K2=l_2(t0+h/2,x0+h*K1/2,u0);
K3=l_2(t0+h/2,x0+h*K2/2,u0);
U=0.55,h=30 U=0.55,h=40
U=0.55,h=41 U=0.55,h=42
U=0.55,h=45 U=0.55,h=48
结论:由图可知,当h大于41时RK4变得不稳定
(3)ode45脚本文件
clc
clear
close
[t,H]=ode45('ode4_5',[1 200],[1.2 1.1]);
function[dh]=l_2(t,x,u)
A=2;
ku=0.1/0.5;
alpha12 = 0.25/sqrt(1.5);
alpha2 = 0.25/sqrt(1.4);
dh(1)=(ku*(u(1))-x(1,1)/(2*sqrt(1.5)/alpha12)+u(2))/A;
dh(2)=(x(1,1)/(2*sqrt(1.5)/alpha12)-x(1,2)/(2*sqrt(1.4)/alpha2))/A;
控制系统仿真实验报告1
昆明理工大学电力工程学院学生实验报告实验课程名称:控制系统仿真实验开课实验室:年月日实验一 电路的建模与仿真一、实验目的1、了解KCL 、KVL 原理;2、掌握建立矩阵并编写M 文件;3、调试M 文件,验证KCL 、KVL ;4、掌握用simulink 模块搭建电路并且进行仿真。
二、实验内容电路如图1所示,该电路是一个分压电路,已知13R =Ω,27R =Ω,20S V V =。
试求恒压源的电流I 和电压1V 、2V 。
IVSV 1V 2图1三、列写电路方程(1)用欧姆定律求出电流和电压 (2)通过KCL 和KVL 求解电流和电压四、编写M文件进行电路求解(1)M文件源程序(2)M文件求解结果五、用simulink进行仿真建模(1)给出simulink下的电路建模图(2)给出simulink仿真的波形和数值六、结果比较与分析实验二数值算法编程实现一、实验目的掌握各种计算方法的基本原理,在计算机上利用MATLAB完成算法程序的编写拉格朗日插值算法程序,利用编写的算法程序进行实例的运算。
二、实验说明1.给出拉格朗日插值法计算数据表;2.利用拉格朗日插值公式,编写编程算法流程,画出程序框图,作为下述编程的依据;3.根据MATLAB软件特点和算法流程框图,利用MATLAB软件进行上机编程;4.调试和完善MATLAB程序;5.由编写的程序根据实验要求得到实验计算的结果。
三、实验原始数据上机编写拉格朗日插值算法的程序,并以下面给出的函数表为数据基础,在整个插值区间上采用拉格朗日插值法计算(0.6)f,写出程序源代码,输出计算结果:四、拉格朗日插值算法公式及流程框图五、程序代码六、计算结果f=(0.6)实验三 动态电路的建模及仿真一、实验目的1.了解动态电路的理论,掌握动态电路建模的基本原理; 2.熟悉MATLAB 的Simulink 模块,并掌握使用模块搭建过程。
二、实验说明电力系统是一个大规模、时变的复杂系统,主要由发电、变电、输电、配电和用电等环节组成,在国民经济中占有非常重要的作用。
《MATLAB与控制系统仿真》实验报告
《MATLAB与控制系统仿真》实验报告一、实验目的本实验旨在通过MATLAB软件进行控制系统的仿真,并通过仿真结果分析控制系统的性能。
二、实验器材1.计算机2.MATLAB软件三、实验内容1.搭建控制系统模型在MATLAB软件中,通过使用控制系统工具箱,我们可以搭建不同类型的控制系统模型。
本实验中我们选择了一个简单的比例控制系统模型。
2.设定输入信号我们需要为控制系统提供输入信号进行仿真。
在MATLAB中,我们可以使用信号工具箱来产生不同类型的信号。
本实验中,我们选择了一个阶跃信号作为输入信号。
3.运行仿真通过设置模型参数、输入信号以及仿真时间等相关参数后,我们可以运行仿真。
MATLAB会根据系统模型和输入信号产生输出信号,并显示在仿真界面上。
4.分析控制系统性能根据仿真结果,我们可以对控制系统的性能进行分析。
常见的性能指标包括系统的稳态误差、超调量、响应时间等。
四、实验步骤1. 打开MATLAB软件,并在命令窗口中输入“controlSystemDesigner”命令,打开控制系统工具箱。
2.在控制系统工具箱中选择比例控制器模型,并设置相应的增益参数。
3.在信号工具箱中选择阶跃信号,并设置相应的幅值和起始时间。
4.在仿真界面中设置仿真时间,并点击运行按钮,开始仿真。
5.根据仿真结果,分析控制系统的性能指标,并记录下相应的数值,并根据数值进行分析和讨论。
五、实验结果与分析根据运行仿真获得的结果,我们可以得到控制系统的输出信号曲线。
通过观察输出信号的稳态值、超调量、响应时间等性能指标,我们可以对控制系统的性能进行分析和评价。
六、实验总结通过本次实验,我们学习了如何使用MATLAB软件进行控制系统仿真,并提取控制系统的性能指标。
通过实验,我们可以更加直观地理解控制系统的工作原理,为控制系统设计和分析提供了重要的工具和思路。
七、实验心得通过本次实验,我深刻理解了控制系统仿真的重要性和必要性。
MATLAB软件提供了强大的仿真工具和功能,能够帮助我们更好地理解和分析控制系统的性能。
控制系统仿真实验报告书
一、实验目的1. 掌握控制系统仿真的基本原理和方法;2. 熟练运用MATLAB/Simulink软件进行控制系统建模与仿真;3. 分析控制系统性能,优化控制策略。
二、实验内容1. 建立控制系统模型2. 进行仿真实验3. 分析仿真结果4. 优化控制策略三、实验环境1. 操作系统:Windows 102. 软件环境:MATLAB R2020a、Simulink3. 硬件环境:个人电脑一台四、实验过程1. 建立控制系统模型以一个典型的PID控制系统为例,建立其Simulink模型。
首先,创建一个新的Simulink模型,然后添加以下模块:(1)输入模块:添加一个阶跃信号源,表示系统的输入信号;(2)被控对象:添加一个传递函数模块,表示系统的被控对象;(3)控制器:添加一个PID控制器模块,表示系统的控制器;(4)输出模块:添加一个示波器模块,用于观察系统的输出信号。
2. 进行仿真实验(1)设置仿真参数:在仿真参数设置对话框中,设置仿真时间、步长等参数;(2)运行仿真:点击“开始仿真”按钮,运行仿真实验;(3)观察仿真结果:在示波器模块中,观察系统的输出信号,分析系统性能。
3. 分析仿真结果根据仿真结果,分析以下内容:(1)系统稳定性:通过观察系统的输出信号,判断系统是否稳定;(2)响应速度:分析系统对输入信号的响应速度,评估系统的快速性;(3)超调量:分析系统超调量,评估系统的平稳性;(4)调节时间:分析系统调节时间,评估系统的动态性能。
4. 优化控制策略根据仿真结果,对PID控制器的参数进行调整,以优化系统性能。
调整方法如下:(1)调整比例系数Kp:增大Kp,提高系统的快速性,但可能导致超调量增大;(2)调整积分系数Ki:增大Ki,提高系统的平稳性,但可能导致调节时间延长;(3)调整微分系数Kd:增大Kd,提高系统的快速性,但可能导致系统稳定性下降。
五、实验结果与分析1. 系统稳定性:经过仿真实验,发现该PID控制系统在调整参数后,具有良好的稳定性。
控制系统仿真实验报告(20200717013819)
控制系统仿真实验报告班级:测控 1402 班姓名:王玮学号: 14050402072018 年 01 月实验一经典的连续系统仿真建模方法一实验目的 :1了解和掌握利用仿真技术对控制系统进行分析的原理和步骤。
2掌握机理分析建模方法。
3深入理解阶常微分方程组数值积分解法的原理和程序结构,学习用Matlab 编写数值积分法仿真程序。
4掌握和理解四阶 Runge-Kutta法,加深理解仿真步长与算法稳定性的关系。
二实验内容 :1.编写四阶 Runge_Kutta 公式的计算程序,对非线性模型(3)式进行仿真。
(1)将阀位u增大 10%和减小 10%,观察响应曲线的形状;(2)研究仿真步长对稳定性的影响,仿真步长取多大时RK4 算法变得不稳定?(3)利用 MATLAB 中的 ode45() 函数进行求解,比较与(1)中的仿真结果有何区别。
2.编写四阶 Runge_Kutta 公式的计算程序,对线性状态方程(18)式进行仿真(1)将阀位增大 10%和减小 10%,观察响应曲线的形状;(2)研究仿真步长对稳定性的影响,仿真步长取多大时RK4 算法变得不稳定?(4)阀位增大 10%和减小 10%,利用 MATLAB中的 ode45() 函数进行求解阶跃响应,比较与( 1)中的仿真结果有何区别。
三程序代码 :龙格库塔 :%RK4文件clccloseH=[1.2,1.4]';u=0.55; h=1;TT=[];XX=[];for i=1:h:200k1=f(H,u);k2=f(H+h*k1/2,u);k3=f(H+h*k2/2,u);k4=f(H+h*k3,u);H=H+h*(k1+2*k2+2*k3+k4)/6;TT=[TT i];XX=[XX H];end;hold onplot(TT,XX(1,:),'--',TT,XX(2,:));xlabel('time')ylabel('H')gtext('H1')gtext('H2')hold on水箱模型 :function dH=f(H,u)k=0.2;u=0.5;Qd=0.15;A=2;a1=0.20412;a2=0.21129;dH=zeros(2,1);dH(1)=1/A*(k*u+Qd-a1*sqrt(H(1)));dH(2)=1/A*(a1*sqrt(H(1))-a2*sqrt(H(2)));2 编写四阶Runge_Kutta公式的计算程序,对线性状态方程(18)式进行仿真:1阀值 u 对仿真结果的影响U=0.45;h=1;U=0.5;h=1;U=0.55;h=1;2 步长 h 对仿真结果的影响:U=0.5;h=5;U=0.5;h=20;U=0.5;h=39U=0.5;h=50由以上结果知 , 仿真步长越大 , 仿真结果越不稳定。
控制系统仿真实验报告
控制系统仿真实验报告——一、实验目的:进一步掌握数值积分法;进一步掌握MA TLAB 软件的使用方法。
二、实验设备:数字计算机,MA TLAB 软件三、实验预备:(1)将传递函数化为一阶微分方程组(即状态方程);令1y y = ,2y y = ,则11222140.6()102722.06y y y y y x t y y y=⎧⎪=⎨⎪=---⎩ 写作矩阵形式:11220100001022.06271040.6y y y y y y ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦ (2)分别写出四种方法的计算公式;令12y Y y y ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦, 01000122.062710A ⎡⎤⎢⎥=⎢⎥⎢⎥---⎣⎦ ,0040.6C ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ , 则可化为Y AY C =+① 欧拉法:Y(i+1)=Y(i)+(A*Y(i)+C)*h; ② 改进欧拉法:Yp=Y(i)+(A*Y(i)+C)*hY(i+1)=Y(i)+(A*Y(i)+C+A*Yp+C)*h/2;③ 四阶经典龙格库塔法:k1=A*Y(i)+C;k2=A*(Y(i)+k1*h/5)+C; k3=A*(Y(i)+2*k1*h/5)+C;k4=A*(Y(i)-2*k1*h/5+k2*h)+C;k5=A*(Y(i)+0.3*k1*h+0.5*k4*h)+C;Y(i+1)=Y(i)+(-k1+15*k2-5*k3+5*k4+10*k5)*h/24;④ 四阶亚当姆斯预估校正法:Yp=Y(i)+(55*(A*Y(i)+C)-59*(A*Y(i-1)+C)+37*(A*Y(i-2)+C)-9*(A*Y(i-3)+C))*h/24;Y(i+1)=Y(i)+(9*(A*Yp+C)+19*(A*Y(i)+C)-5*(A*Y(i-1)+C)+(A*Y(i-2)+C))*h/24;(3)理论分析:计算系统特征值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
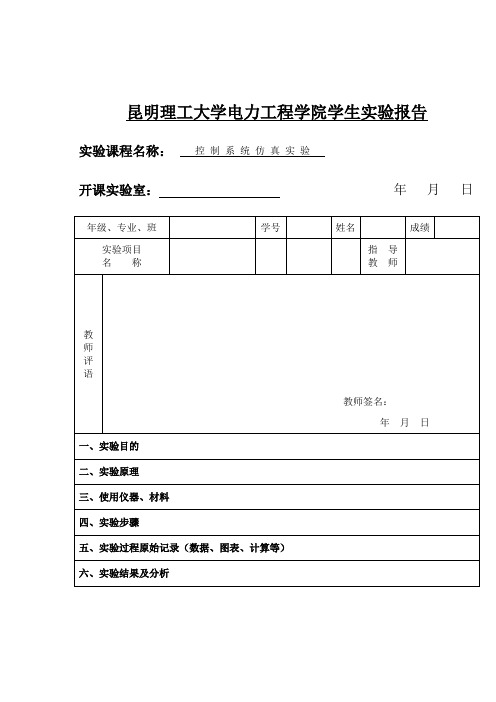
昆明理工大学电力工程学院学生实验报告
实验课程名称:控制系统仿真实验
开课实验室:年月日
实验一 电路的建模与仿真
一、实验目的
1、了解KCL 、KVL 原理;
2、掌握建立矩阵并编写M 文件;
3、调试M 文件,验证KCL 、KVL ;
4、掌握用simulink 模块搭建电路并且进行仿真。
二、实验内容
电路如图1所示,该电路是一个分压电路,已知13R =Ω,27R =Ω,20S V V =。
试求恒压源的电流I 和电压1V 、2V 。
I
V
S
V 1
V 2
图1
三、列写电路方程
(1)用欧姆定律求出电流和电压 (2)通过KCL 和KVL 求解电流和电压
四、编写M文件进行电路求解(1)M文件源程序
(2)M文件求解结果
五、用simulink进行仿真建模(1)给出simulink下的电路建模图(2)给出simulink仿真的波形和数值
六、结果比较与分析
实验二数值算法编程实现
一、实验目的
掌握各种计算方法的基本原理,在计算机上利用MATLAB完成算法程序的编写拉格朗日插值算法程序,利用编写的算法程序进行实例的运算。
二、实验说明
1.给出拉格朗日插值法计算数据表;
2.利用拉格朗日插值公式,编写编程算法流程,画出程序框图,作为下述编程的依据;
3.根据MATLAB软件特点和算法流程框图,利用MATLAB软件进行上机编程;
4.调试和完善MATLAB程序;
5.由编写的程序根据实验要求得到实验计算的结果。
三、实验原始数据
上机编写拉格朗日插值算法的程序,并以下面给出的函数表为数据基础,在整个插值区间上采用拉格朗日插值法计算(0.6)
f,写出程序源代码,输出计算结果:
四、拉格朗日插值算法公式及流程框图
五、程序代码
六、计算结果f=
(0.6)
实验三 动态电路的建模及仿真
一、实验目的
1.了解动态电路的理论,掌握动态电路建模的基本原理; 2.熟悉MATLAB 的Simulink 模块,并掌握使用模块搭建过程。
二、实验说明
电力系统是一个大规模、时变的复杂系统,主要由发电、变电、输电、配电和用电等环节组成,在国民经济中占有非常重要的作用。
动态过程是电力系统中的存在的常态结构形式,为了更好的理解动态过程的理论,掌握动态过程的物理本质,本实验利用MATLAB 搭建一个包含RLC 元件的简单动态系统,采用编程和数值模型仿真的方法分别进行分析计算,得出计算结果。
三、实验内容
电路如图2所示,该电路是一个RLC 电路,已知200S V V =,6410()L H -=⨯,
6410()C F -=⨯, 1.5R =Ω。
试求电感的电流L I 和电容的电压C U 。
V S
图2
四、编写M 文件进行电路求解
(1)M 文件源程序 (2)M 文件求解结果
五、用simulink进行仿真建模(1)给出simulink下的电路建模图(2)给出simulink仿真的波形和数值
六、结果比较与分析
实验四 正弦稳态电路的设计及仿真
一、实验目的
1、掌握正弦稳态电路分析的方法;
2、并掌握使用模块搭建过程。
二、实验说明
电力系统在正弦稳态电源的激励下会在整个系统中产生正弦稳态的响应,一般在对正弦稳态电路进行分析的时候采用相量法进行分析。
在使用MATLAB 解决正弦稳态电路的时候一般可以采用欧拉公式法和相量法两种思路进行理论分析计算。
掌握SIMULINK 建模的方法,使用SIMULINK 对正弦稳态电路进行建模分析。
三、实验内容
电路如图2所示,该电路是一个正弦稳态电路,已知1235R R R ===Ω,
2L X =Ω,3C X =Ω,1150()US V ∙
=∠,250()US V ∙
=∠,30()IS A ∙
=∠。
试求各支路电流,并且绘制各支路电流的时间曲线。
US1
图3
四、编写M 文件进行电路求解
(1)M 文件源程序 (2)M 文件求解结果
五、用simulink进行仿真建模(1)给出simulink下的电路建模图(2)给出simulink仿真的波形和数值
六、结果比较与分析。