基于稳健性的乘用车前下控制臂设计优化
动力总成悬置系统优化及稳健性分析
动力总成悬置系统优化及稳健性分析动力总成悬置系统是指汽车中发动机、变速器和驱动轴等汽车动力总成部件的组成系统,它对车辆的性能和安全性具有重要的影响。
因此,优化动力总成悬置系统的设计和提高其稳健性是汽车设计和生产中的一个重要课题。
在动力总成悬置系统设计中,需要考虑多个方面,包括系统整体重量、系统刚度、支撑件材料选用、降低噪音、减少振动等。
为了实现这些要求,通常需要结合数值分析和实验方法进行优化设计。
在系统整体重量的优化方面,设计师可以采用新型材料或优化零部件设计等措施来减轻体重。
例如,使用降低密度但强度较高的铝合金,或采用轻量化的减震器等。
在系统刚度方面,可以通过各种方式提高系统刚度,例如增加材料厚度、设计增加支撑件数量和位置等方案,同时还可以结合实验技术和数值分析方法,优化系统的刚度。
在支撑件材料选用方面,需要考虑动力总成悬置系统所处环境的特殊性质,如温度、湿度、腐蚀等,并且应该考虑到材料成本、加工工艺性、可靠性等因素。
这些要素均需在材料选用过程中进行综合考虑。
在噪音和振动方面的优化,需要采用减震、减振等措施,例如在发动机与车身之间设计隔振器,利用减振器改善驾驶稳定性并降低噪音。
同时,还可以采用模拟试验和理论模拟等方法,以确定系统的不同工况下的振动和噪声水平,并加以适当的改善。
此外,动力总成悬置系统的稳健性分析也是一个非常关键的方面。
系统的稳健性指的是系统能够在各种不确定情况下保持良好的性能和稳定性。
在系统的稳健性分析中,需要考虑到各种可能的负载情况、失效情况和故障情况,并结合设计要求和汽车行驶情况,确定系统的最佳稳健性设计方案。
这一过程需要采用可靠性分析方法,综合评估系统的稳健性。
总之,动力总成悬置系统的优化和稳健性设计是汽车工程设计中的一个重要环节。
通过采用先进的设计方法和技术手段,可以不断提高汽车的性能和安全性,满足消费者不断增长的需求和期望。
此外,为了实现动力总成悬置系统的优化和稳健性设计,需要充分了解系统的工作原理和特性。
乘用车H臂悬架C特性的稳健性优化设计
摘要: 针对某乘用车底盘调校过程中反复修改 H 臂悬架衬套参数所存在的调校周期长、 性能改进不明显等问题, 考虑到悬架 安装误差, 提出基于田口法的稳健性优化方案。 首先建立悬架模型, 根据 K&C 试验数据验证模型准确性; 对衬套刚度进行灵敏度 分析, 筛选主要影响因素, 确定目标函数, 通过正交试验设计对 H 臂悬架 C 特性进行多目标稳健性优化。 结果表明: 优化后的悬 架 C 特性及其稳健性均有明显改进, 且缩466 / j������ cnki������ 1674-1986������ 2018������ 05������ 001
乘用车 H 臂悬架 C 特性的稳健性优化设计
曹开斌1, 廖抒华1, 刘锦武2
(1������ 广西科技大学汽车与交通学院, 广西柳州 545006; 2������ 柳州孔辉汽车科技有限公司, 广西柳州 545006)
健性优化, 探究一种可改善悬架性能且缩短调校周期的有效 方法。
1 H 臂悬架模型的建立与验证
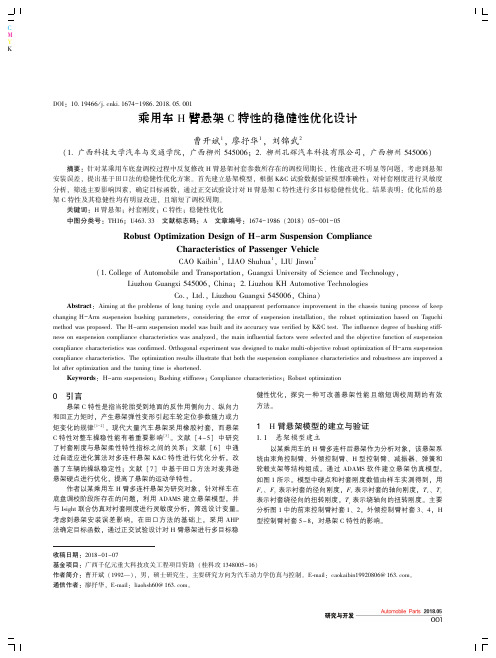
1������ 1 悬架模型建立 以某乘用车的 H 臂多连杆后悬架作为分析对象, 该悬架系
统由束角控制臂、 外倾控制臂、 H 型控制臂、 减振器、 弹簧和 轮毂支架等结构组成。 通过 ADAMS 软件建立悬架仿真模型, 如图 1 所示。 模型中硬点和衬套刚度数值由样车实测得到, 用 Fx、 Fy 表示衬套的径向刚度, Fz 表示衬套的轴向刚度, Tx、 Ty 表示衬套绕径向的扭转刚度, Tz 表示绕轴向的扭转刚度。 主要 分析图 1 中的前束控制臂衬套 1、 2, 外倾控制臂衬套 3、 4, H 型控制臂衬套 5 ~ 8, 对悬架 C 特性的影响。
作者以某乘用车 H 臂多连杆悬架为研究对象, 针对样车在 底盘调校阶段所存在的问题, 利用 ADAMS 建立悬架模型, 并 与 Isight 联合仿真对衬套刚度进行灵敏度分析, 筛选设计变量。 考虑到悬架安装误差影响, 在田口方法的基础上, 采用 AHP 法确定目标函数, 通过正交试验设计对 H 臂悬架进行多目标稳
乘用车底盘的转向系统的操纵稳定性与操纵性能的优化设计

乘用车底盘的转向系统的操纵稳定性与操纵性能的优化设计乘用车底盘的转向系统是整个车辆操控性能的关键部分之一,对于乘客的行车安全和驾驶者的操控体验至关重要。
操纵稳定性和操纵性能是该系统优化设计中需要重点考虑的两个方面。
本文将从设计思路、优化方法和实验验证等方面探讨乘用车底盘的转向系统的操纵稳定性与操纵性能的优化设计。
首先,优化乘用车底盘的转向系统的操纵稳定性需要从几个方面入手。
首先是车辆的悬挂系统设计。
悬挂系统对于车辆的稳定性起着至关重要的作用,设计合理的悬挂系统可以提供良好的支撑力和操纵稳定性。
其次是转向系统的部件设计。
转向系统的部件包括转向齿轮、转向电机、转向节、转向拉杆等,这些部件的设计精度和材料选择都会直接影响车辆的操纵稳定性。
最后是转向系统的控制策略。
采用先进的电子控制技术,如电子稳定控制系统(ESC)等,可以实现车辆的主动稳定性控制,提高操纵稳定性。
其次,操纵性能的优化设计也是乘用车底盘的转向系统设计的重点之一。
操纵性能包括操纵手感、操纵灵敏度和操纵准确性等方面。
首先是操纵手感的设计。
操纵手感是指驾驶者在操纵转向系统时所感受到的反馈力量和线性感,通过合理设计转向系统的力反馈机构,可以提供良好的操纵手感。
其次是操纵灵敏度的设计。
操纵灵敏度是指驾驶者操纵转向系统时的反应速度和转向角度调整的准确性,通过合理调整转向系统的转向比和转向角度传感器的灵敏度,可以提高操纵灵敏度。
最后是操纵准确性的设计。
操纵准确性是指驾驶者通过转向系统操纵车辆时的转弯半径和转向准确度,通过合理设计转向系统的传动比、转向角度传感器的准确性和转向系统的回馈机制,可以提高操纵准确性。
优化乘用车底盘的转向系统的操纵稳定性和操纵性能的设计需要通过实验验证来保证。
首先是通过模拟仿真来验证设计的合理性。
利用计算机模拟软件,对设计的转向系统进行各种工况和动态仿真,验证设计方案的操纵稳定性和操纵性能。
其次是通过道路试验来验证设计方案的实际效果。
轿车悬架控制臂参数化建模及轻量化多目标优化设计

轿车悬架控制臂参数化建模及轻量化多目标优化设计车辆悬架是车辆重要的组成部分之一,直接关系到车辆的行驶性能和舒适性。
悬架控制臂作为悬架系统的重要部件,其参数设计对车辆的转向稳定性、抗疲劳能力、通过性等方面有着很大影响。
为了提高轿车的性能与可靠性,轿车悬架控制臂的参数化建模和轻量化多目标优化设计是必不可少的步骤。
首先,对于轿车悬架控制臂参数化建模,可以采用CAD建模软件进行完成。
具体的建模过程包括坐标系的设定、几何图形的建立及参数的提取等。
在建模时需考虑到悬架控制臂的结构特点以及设计要求,以确保建模结果准确可靠。
其次,针对轿车悬架控制臂的轻量化优化设计,可以采用拓扑优化技术。
具体做法是在前提满足轿车行驶稳定性的基础上,利用有限元分析软件对悬架控制臂进行力学仿真分析,获得载荷作用下的最大应力集中区域。
然后,设置拓扑域和拓扑分区,减少结构材料的使用量,同时保证结构刚度和强度要求。
最后再基于多目标优化理论,考虑在轿车悬架控制臂轻量化的基础上进一步优化转向稳定性和驾驶舒适性等方面的性能。
最后,轿车悬架控制臂参数化建模与轻量化多目标优化设计的实施,可以达到节省材料、减轻车重、提升性能和降低油耗等多重优势。
同时还可以有效控制车辆成本,提高车辆的市场竞争力。
因此,在轿车悬架系统的设计中,参数化建模与轻量化多目标优化设计的应用越来越受到车辆制造业和悬架系统制造公司的重视和推广。
在进行轿车悬架控制臂参数化建模和轻量化多目标优化设计时,还需要考虑一些关键因素。
首先需要考虑的是材料选择与性能设计。
轿车悬架控制臂所使用的材料不仅需要满足强度、刚度等基本要求,同时还需考虑其重量、成本等因素。
因此,在进行参数化建模和轻量化多目标优化设计时,需要根据材料的特性和特点进行合理的材料选择。
其次,在选定适当的材料后,需要进一步考虑材料的加工工艺以及成本等方面的因素。
针对这些因素,需要通过多方面的分析,优化材料性能与成本,以达到最优的效果。
《2024年某型汽车前悬架控制臂的结构分析与优化》范文

《某型汽车前悬架控制臂的结构分析与优化》篇一一、引言随着汽车行业的不断发展,车辆的性能、舒适性和安全性逐渐成为了消费者购车时的重要考量因素。
作为汽车底盘系统的重要组成部分,前悬架控制臂的设计与制造对汽车的操控性能、稳定性和行驶安全性起着至关重要的作用。
本文将对某型汽车的前悬架控制臂的结构进行深入分析,并提出相应的优化方案。
二、某型汽车前悬架控制臂的结构分析某型汽车的前悬架控制臂主要采用铸铁材料,通过锻造和机械加工而成。
其结构主要包括连接部分、支撑部分和安装部分。
连接部分负责将控制臂与转向节和减震器连接;支撑部分则负责支撑车身并传递路面反馈;安装部分则用于固定控制臂在车身上的位置。
此外,为满足各种行驶需求,前悬架控制臂在设计上还需考虑到多角度的弯折和扭力承受能力。
三、当前结构存在的问题虽然某型汽车的前悬架控制臂在常规使用条件下表现出色,但在长期使用和高强度驾驶环境中仍存在一定的问题。
如,某些部位易发生疲劳裂纹,影响行车安全;控制臂重量较大,导致整车重量增加,影响燃油经济性;某些结构细节的设计不够合理,可能导致车辆操控性能和稳定性的降低。
四、结构优化方案针对上述问题,我们提出以下结构优化方案:1. 材料优化:采用轻质材料替代铸铁,如铝合金或高强度钢材,以降低控制臂的重量,提高燃油经济性。
2. 结构改进:在易发生疲劳裂纹的部位增加加强筋或改变结构形式,以提高其抗疲劳性能和强度。
同时,对安装部分和支撑部分进行优化设计,以提高车辆操控性能和稳定性。
3. 细节优化:对控制臂的细节设计进行优化,如优化连接部分的形状和尺寸,使其更符合力学原理,提高其传递力和扭矩的效率。
五、结论通过对某型汽车前悬架控制臂的结构分析与优化,我们找到了其存在的问题并提出了相应的解决方案。
这些优化措施不仅有助于提高车辆的操控性能、稳定性和安全性,还能降低整车重量,提高燃油经济性。
未来,我们将继续深入研究汽车底盘系统,为消费者提供更加优质、高效的汽车产品。
《2024年某型汽车前悬架控制臂的结构分析与优化》范文
《某型汽车前悬架控制臂的结构分析与优化》篇一一、引言汽车作为现代交通工具的重要组成部分,其性能和舒适度直接关系到用户的驾驶体验。
前悬架控制臂作为汽车悬架系统的重要部件,其结构设计和性能优化对汽车的行驶稳定性和安全性具有重要影响。
本文将针对某型汽车的前悬架控制臂进行结构分析与优化,以提高其性能和可靠性。
二、某型汽车前悬架控制臂的结构分析某型汽车的前悬架控制臂主要由轴承、连接杆、支撑架等部分组成。
其中,轴承负责支撑和连接车轮,连接杆则将控制臂与车身连接起来,支撑架则为控制臂提供稳定的支撑。
在车辆行驶过程中,前悬架控制臂需要承受来自车轮的冲击力和侧向力,因此其结构必须具备足够的强度和刚度。
然而,该型汽车的前悬架控制臂在结构上存在一些不足之处。
例如,连接杆与轴承的连接部分较为薄弱,容易在长期使用过程中出现磨损和断裂。
此外,支撑架的稳定性也有待提高,以应对各种路况下的冲击和振动。
三、前悬架控制臂的优化方案针对某型汽车前悬架控制臂的结构特点及存在的问题,本文提出以下优化方案:1. 增强连接部分的强度:通过优化连接杆与轴承的连接结构,增加连接部分的厚度和强度,以减少磨损和断裂的可能性。
同时,采用高强度材料制作连接部分,提高其抗拉强度和耐磨性。
2. 提高支撑架的稳定性:通过改进支撑架的结构设计,增加其刚度和稳定性。
可以采用更为稳固的支架结构,或者增加支撑点的数量,以提高整个前悬架系统的稳定性。
3. 轻量化设计:在保证强度和刚度的基础上,对前悬架控制臂进行轻量化设计。
采用轻质材料制作控制臂,减少其重量,以提高车辆的燃油经济性和行驶性能。
4. 优化制造工艺:采用先进的制造工艺和技术,如数控加工、焊接等,提高前悬架控制臂的加工精度和装配质量。
同时,通过优化生产流程,降低制造成本,提高生产效率。
四、优化后的效果评估经过对某型汽车前悬架控制臂的结构分析与优化,可以预期达到以下效果:1. 提高前悬架系统的稳定性和可靠性:优化后的前悬架控制臂具有更高的强度和刚度,能够更好地承受来自车轮的冲击力和侧向力,提高车辆的行驶稳定性和安全性。
《某型汽车前悬架控制臂的结构分析与优化》范文
《某型汽车前悬架控制臂的结构分析与优化》篇一一、引言随着汽车行业的飞速发展,车辆性能和舒适性日益成为消费者关注的焦点。
前悬架控制臂作为汽车底盘系统的重要组成部分,对车辆行驶的平稳性和操控性具有至关重要的影响。
本文旨在分析某型汽车前悬架控制臂的结构特点,并提出相应的优化方案,以提高车辆的行驶性能和安全性。
二、某型汽车前悬架控制臂的结构分析某型汽车前悬架控制臂主要承担着支撑、转向和减震的作用。
其结构主要包括主臂、连接部分和衬套等部件。
主臂部分采用高强度钢材制成,具有较高的抗拉强度和抗扭强度,保证了在行驶过程中能够承受各种外力作用。
连接部分则通过螺栓等紧固件与转向节等部件相连,实现了转向和减震的功能。
衬套部分则起到减震和降噪的作用,提高了车辆的舒适性。
三、前悬架控制臂存在的问题及原因分析尽管某型汽车前悬架控制臂在结构上具有一定的优点,但在实际使用过程中仍存在一些问题。
例如,由于材料性能和加工工艺的限制,可能导致控制臂在承受外力时产生变形或断裂等问题。
此外,连接部分的紧固件可能因松动而导致安全隐患。
针对这些问题,本文将进行深入的分析,并探讨其产生的原因。
四、前悬架控制臂的优化方案针对某型汽车前悬架控制臂存在的问题,本文提出以下优化方案:1. 材料优化:选用更高强度、更轻量化的材料替代原有的高强度钢材,以提高控制臂的抗拉强度和抗扭强度。
同时,采用先进的加工工艺,提高材料的利用率和加工精度。
2. 结构优化:对控制臂的结构进行优化设计,减小应力集中和振动产生的可能性。
例如,可以改进连接部分的形状和布局,提高其承载能力和抗疲劳性能。
此外,还可以在控制臂上增加加强筋等结构,提高其整体刚度和稳定性。
3. 紧固件优化:对连接部分的紧固件进行升级,采用更先进的防松技术和紧固方法,确保在各种路况下都能保持紧固状态,从而提高车辆的安全性。
4. 减震降噪优化:改进衬套部分的材料和结构,提高其减震和降噪性能。
例如,可以采用粘弹性材料或液态衬套等新型减震元件,提高车辆的舒适性和静谧性。
基于HyperWorks的麦弗逊悬架下控制臂的优化
基于HyperWorks的麦弗逊悬架下控制臂的优化作者:李成1 简介麦弗逊悬架在目前是大多数中小型轿车前悬架所首选的类型,对于麦弗逊悬架的下控制臂来说主要在加速、制动、过坎是承受纵向力,以及在转向是承受侧向力,对于垂向力下控制臂只是抵消前后橡胶衬套被扭转变形时的一些结构反力,垂向力主要由滑柱弹簧来承受,由于作用在控制臂上的垂向力在数量级上远小于纵向力及侧向力,所以在校核下控制臂时通常不考虑垂向力。
麦弗逊悬架的受力情况如图1所示。
图1 优化前控制臂模型图2所示为优化前的控制臂,材料为锻钢40Cr 为了保证足够的转弯半径,控制臂的结构设计空间较小,有应力集中区域如图3所示。
图2 优化前控制臂模型图3 优化前控制臂结构示意新款车型在原有车型基础之上,加宽了前轮距。
也即轮心坐标外移,其他硬点不做改动,这样控制臂多出结构优化空间,如图4比较所示。
图4 控制臂新的设计边界2 有限元模型的建立2.1 建立设计边界根据布置情况利用CAD软件建立起设计边界模型,如图5所示。
图5 新的控制臂拓扑优化边界2.2 优化前处理2.2.1 网格划分将建立的拓扑优化边界导入HyperMesh 划分网格,单元类型采用一阶四面体单元,最终网格划分情况如图6所示。
图6 划分网格2.2.2 添加材料创建出各向同性金属材料,参考手册或询问供应商得知其弹性模量及泊松比,如图7所示。
图7 添加材料2.2.3 设置属性划分优化区域及非设计区域,因为拓扑优化区域是由属性来识别的,所以通过多个属性可区分设计及非设计区域,本例中将控制臂前衬套外圈、后衬套芯轴、外球销点紧固螺栓孔设置为非设计区域,其他为设计区域,如图8所示。
图8 划分设计、非设计区域2.2.4 连接关系建立使用RBE2 单元将外球销点与三个紧固螺栓孔内壁节点连接、相同的操作将前后衬套中心点与对应节点连接。
2.2.5建立边界条件麦弗逊悬架控制臂分析时通常固定前衬套X、Y、Z三个方向平动(1、2、3),后衬套点Y、X方向平动(2、3),外球销点Z方向平动(1),Loadtype 选择SPC,结果如图9所示(坐标系为整车坐标系)。
车辆控制臂优化设计
7
制 动 767_
767 #6#
7
反向制动#6;_ 8#6; #6#
7
反向制动7_ 876# #6#
7
加 速 #6;_
8#6; #6#
7
加速和转向#6;_ 8#6; #6;
7
对 角 扭 9_
#6# #6#
9
""注&7_ Va6: P'29%下同%
""&I&%*依据标准工况提取控制臂载荷加 载到 控 制 臂 上 各 个 硬 点 !如 图 " 所 示 "%
图#"车辆悬架系统 %9%$)刚柔耦合模型
:
" " " " " 公 路 与 汽 运 " " " " " "9#75 年 " 月 "
根 据 对 试 验 场 路 谱 采 集 数 据 的 分 析$确 定 控 制 臂 的 标 准 工 况 和 载 荷 !如 表 7 所 示 "%
"""""公路与汽运
"总第7$"期"""""""!"#$%&'( D )*+,-,+"./)001"2&+",3("""""""""" $
车辆控制臂优化设计
张 继 宏 王 文 志 郑 素 云 王 孔 龙
北 京 汽 车 工 程 研 究 院 北 京 "7#7"##
基于操纵稳定性的车辆悬架性能参数稳健设计方法
JTE =
W 1 J2E +W 2 JB2 +W 3 JR2 +W 4 JS2 W 1 +W 2 +W 3 +W 4
式中 W 1 ~W 4 为各个单项评价指标对 JTE的影响系
数 ,是选择大量典型车型以操纵稳定性主 、客观评价
值一致为目标进行优化后得到的 ,为车辆行驶速度
的函数 [ 7 ] ; JE 为轨道总方差 ,代表人 2车系统跟踪预 定路径的精度 ,是保证行车安全性的最重要指标 ,包
稳健设计方法在汽车设计领域得到了越来越多 的运用 [ 1 - 4 ] ,不过将其运用在整车操纵稳定性设计 中 ,国内还没有相关报导 。文中使用 Taguchi稳健设 计方法对所建立的某型轿车虚拟样机模型中车辆悬 架零部件性能参数进行稳健设计 ,使车辆操纵稳定 性得到提高 。
3 国家自然科学基金 (50575041) 、江苏省十五科技攻关项目 (BE2003013)和江苏省汽车工程重点实验室开放基金项目 (QC200501)资助 。
1 轿车虚拟样机模型
111 虚拟模型建立 模型 采用 Adam s软件 建立 。由于 Adam s/Car
具有良好的模块设计功能 ,因而采用其作为车辆多 体动力学建模软件 。模型中的实体零部件绝大多数 均根据企业图纸在 Catia软件中生成 ,再导入 Adam s 中 ,保证了零部件几何及质量参数的准确性 。模型 中的力学参数 (刚度 、阻尼等 )均由企业提供 ,其大 部分是非线性的 。模型包括动力总成 、前悬架 、后悬 架 、转向 、轮胎和稳定杆等子模块 。前悬架系统为麦 弗逊式独立悬架 ;后悬架系统为纵臂扭转梁式半独 立悬架 ;转向系统为齿轮齿条式 ;轮胎为 175R13。
后悬架的纵臂扭转梁式半独立悬架虽然结构较 简单 ,但变形比较大 ,如果将其作为刚体 ,会无法真 实地反映其动态特性 [ 5 ] 。此时对其 Catia图纸进行 有限元划分 , 将生成的 MNF 文件 导入 Adam s/Car 中 ,这样生成的刚柔耦合动力学模型保证了模型动 力学分析的精度 。模型中前悬架稳定杆也是采用有 限元软件生成 MNF文件后导入整车模型中的 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第52卷第5期 锻I装备与制造按术2〇17年10月Vol. 52 No. 5 CHINA METALFORMING EQUIPMENT & MANUFACTURING TECHNOLOGY Oct. 2017基于稳健性的乘用车前下控制臂设计优化阴雪莲(上海汇众汽车制造有限公司技术中心,上海200122)摘要:本文对汽车前下控制臂的屈曲强度进行C A E分析及试验验证,并基于失效模式进行设计评审(D R B F M),发现球头球心相 对于控制臂本体的垂向位置对屈曲变形的失效模式较为敏感。
基于N F D和田口方法,通过设计优化,使产品性能足够抵抗制造 公差的干扰,按照功能要求实现一种稳健的失效模式,并完成有效性试验验证。
通过应用六西格玛设计理念,实现产品质量的先期策划。
关键词d前下控制臂;球头球心;优化设计;稳健性;屈曲变形;失效模式中图分类号d TP391.7 文献标识码:AD01:10.16316/j.issn.1672-0121.2017.05.022 文章编号:1672-0121(2017)05-0073-04在汽车底盘结构中,控制臂作为悬架系统的受力、导向和传力零件,需满足以下功能要求:使悬架系统在路面的冲击下处于弹跳和回弹状态;将车轮传递过来的纵向力与横向力通过橡胶衬套传递给副车架;通过对转向节的定位来影响底盘调校[1]。
控制 臂对汽车行驶的安全性影响非常大,在设计开发阶段 设计的和 [2-3$。
对车的前下控制臂,在设计验证过程中对零件的效模式进行分析论,找出造成该效模式的root cause),分析这种效模式对驶安全性的影响。
将功能开(quality function deployment)和田口(Taguchi method的开发过程中[4-5$,通过设计优化,设计,使能满足顾、、,力。
出的设计,作为通用方,导 开发1前下控制臂屈曲C A E分析汽车前下控制臂在汽车行驶过程中承受车轮传递过来的横向力和纵向力,在设计开发通过整车受力分析,计算出行驶工况下,控制臂,衬套中心)的受力状在控制臂产收稿日期%2017-05-04;修订日期%2017-06-15作者简介:阴雪莲(979-),女,硕士,工程师,从事汽车零部件设计开发。
E-m ail:yinxue1ian@ 品开发过程中,会依据整车分析中球头球心受力状况,提取出横向和纵向受力大,以此作为控制臂分析的在零部件的C A E分析中,计出控制臂在横向和纵向能受的最大力,与进行对比,以此判断控制臂在整车行驶中能否承受极限载荷[6]。
控制臂控制臂本体、球头和前后衬套组成,1和衬套的结构在 成开发过程中进行校计,在控制臂开发过中,要是考控制臂本体的结构。
图1控制臂总成在C A E建模时,以对控制臂总成结构进行适当简[7-8],其建模2控制臂的冲压件,用壳单元中的四边形或三角形进行网格划分。
球头简化为刚体单元R B E2并约束竖直方向位移,作为刚单元的主节点,夕卜直接施加于球心上。
衬套简化为刚体单元R B E3,与接地弹簧单元进行连接,从实现边界约束。
接地弹簧单元的各向刚系数参考衬套的各向刚度,以来模拟衬套结构。
对于分析,分对施加横向(!向)和纵向("向)位移,计结构在能受的大力-73-第52卷对 目,通过分析 的载,控制臂屈曲力的目18.8kN 。
在设计优阶段,通过对状的,C A E 结果示成可以承受19.5k N 的纵向力。
在进行台架试验验证 , 件的屈曲力可以达到22kN试验件 在C A E 分析阶段,加设计的可靠度, 曲的最进行设,分析 过中的加化,试验结果C A E 结果期。
台架试验结果和C A E 结果对比如图4所示。
2510 20 30 40 50加载位移/ mm图4屈曲力台架结果和C A E 结果在对比屈曲力试验和C A E 结果的同时,对失效模式也进行了分析。
在试验结果中,屈曲失效发 在控制臂体近的,控制臂体顺着力的方发反,导致座中脱出,如图5,所示。
在C A E 结果中,结构屈曲失效发生 在球头和前衬套的中,失效控制臂不会顺加载力的方发翻,即 不会座中脱出,失效时仅点发偏离,如图5b所示。
此种失效模式,是让驾驶者无危险的情况下 感受到零件失效,C A E 中的失效模式是客户需要的 失效模式。
接地弹簧2前下控制臂屈曲台架试验C A E 分析在产品前期开发过程中可以缩短开发周期,后续需要通过物理试验进行设计确认。
物理试 验的目的是验证C A E 分析结果,因此需要最大程度 地复现C A E 的加载条件和边界条件。
控制臂的屈曲台架试验搭建如图3所示。
在台 架夹具设计阶段,对夹具自身结构进行了刚度校核, 前后衬套约束点的刚度均达到10e6N /m m 以上,可以 认为是刚约束,试验通过螺栓将衬套内套筒紧 固在夹头上。
在球头侧,将一与球头杆形状一致的球 头套箍紧固在球头上,助动头通过球头套箍对球头 施加水平力。
球头套箍上方连接一根刚性棒,刚性棒 上进行动约束,约束点动,因刚性棒足够长(约1m ),可以认为下端在竖直方向无 法产 ,制了套箍在方的位移,实现对的约束。
图3屈曲台架试验3基于失效模式的设计评审(D R B F M )3.1首轮CAE 与试验结果对比以上C A E 分析和台架试验目的是在设计开发 阶段能够分析验证的载力,控制臂总设计要 , 在 行 中可以大载。
(a )试验结果(b )C A E 结果图5屈曲失效模式台架结果和C A E 结果-74 -锻压装备与制造技术2015102 37V稱I1阴雪莲&基于稳健性的乘用车前下控制臂设计优化第5期3.2基于失效模式的设计评审及分析对于屈曲失效模式,试验结果与C A E结果出现差异,并且试验结果不是我们期望得到的失效模式。
因此,我们需要对试验过程和失效模式进行评审及分析。
试验分析的前提是输入条件符合要求,这其中包括试验零件尺寸、试验零件材料、台架搭建与CAE 分析模型的吻合度。
在试验开始前期我们做了一定的准备工作。
首先对于试验零件尺寸,在试验前通过对冲片散件进行蓝光扫瞄,对进行三,试验零件的尺寸在要求的差范围内。
对于控制臂本材料,进行了材料机试,的材料符合材料准。
对于度在C A E分析提的了前的。
对于台架的搭建的 C A E分析模型的并在搭建进行位置标定差在的范围内。
于 试验条件试验结果试验结果进行评审。
在制臂我们发现球头球心的竖与 制 中 的 对,控制 的 ,曲 度。
需要与控制中 于一,以此获得的曲度,此时控制不,。
兰1mm,屈曲度,并,,顺着力的方向脱出,6b&,曲 在前中间的控制 ,不 ,脱出风险较低,如图6c所示。
通过以上分析,对试验零件尺寸再次进行尺寸检测,发现存在系统差,位置相对于冲片位置偏上约0.5mm〜lm m,如图7所。
造这一差的原因,经排查为压装具的尺寸差。
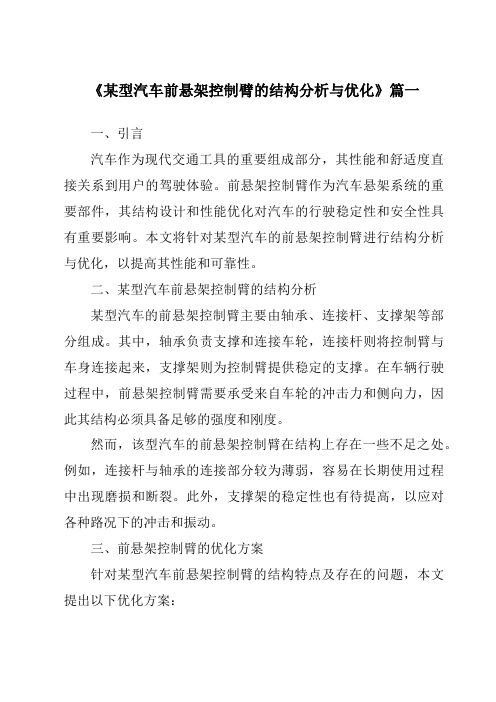
3.3调整过的试验验证为验证球心向上位置偏差是否为导致球头脱出的根原因,重新制备了试验零件,在压装压装到的区域,压装后的零件8252015105异0^10 20 30 40 50加载位移/mm(a)球心在剪切中心平面上加载位移/mm(4)球心向上偏移l%5mm加载位移/mm(c)球心向下偏移l%5mm图6球心位置对屈曲强度和失效模式的影响图7球头球心位置偏差图8校正过的球头球心位置所示。
试验后发现控制臂的变形模式与C A E结果吻合良好,曲 在控制中间 ,没有脱出,并且由于的 ,试验屈曲提高到24.8kN。
试验结果如图9所示。
通过再次试验,验证30之252015105加载位移/mm(a)屈曲失效模式(4)屈曲力曲线图9球心位置调整过的试验结果-75-锻压装备与制造技术第52卷了之前失效模式与C A E 结果不一致的根本原因,即 是球心位置的向上偏差引起。
3.4设计优化通过上述分析和验证,找出了试验中球头脱出 的根本原因。
在控制臂实际制造过程中,球头 左右的向上偏差在公差允许范围内,正常加工工艺 很难避免。
按照D F S S 的田口方法,需要设计出对这 种噪声因子不敏感的产品,即实现一种稳定的设计, 避免球心向上偏差致的不 失效模式。
,在产设计上将控制臂本对球头球心向上偏移1.5mm ,如图10所'。
这种预校正方式,即使球头球心在加工过程中有向上1.5m m 的位置偏差, 也能将球心相对于冲片的位置控制在一个合理的范 围内, 一种稳定的失效模式,即球心 位置 偏 ,不,球头在失效球中脱出。
4结论对基于控制臂屈曲试验的失效模式进行设计评审,找致不的失效模式的根本原因,即球心位置的向上偏差致 失效,球头脱出。
正了球心位置偏差后, 试验,试验结果的失效模式预,证这一结的正。
为使该控制臂按客户要求实现一种低风险且稳 健的失效模式,按照田口方法对设计 了,排除了加工过程中噪声因素对产的影,使控制臂的设计加稳, 产这一设计。
参考文献:[1] 周长城.车辆悬架设计及理论[M ].北京:北京大学出版社,2011:186-192.[2] 王彦杰.汽车设计质量检验方法的研究[J ].工业设计,2016,( 3):120-125.m李彦.产品创新设计理论及方法北京:科学出版社,2012.[4] 张振宇,孙丽丽.设计开发”内建质量”模型的运用和建立[J ].上海质量,2013,(1) :48-52.[5]Lock &my .Archie . Quality Function Deployment : Total Quality Management for New Product Design [J ]. International Journal of Quality " Reliability Management . 1995,12(6) :75-84.[6] 张继宏,王文志.车辆控制臂优化设计[J ].公路与汽运,2016,( 2):7-10.[7 ] Murali M .R . Krishna , Aaron Stange . Topology and ClassicalShape Optimization of a Lower Control Arm - a Case Study . ASME 2006 International Design Engineering Technical Confer ences & Computers and Information in Engineering Conference . September 10-13,2006.[8]石广丰,高韬.基于ABAQ US 的某汽车悬架控制臂仿真模态分析[J ].长春理工大学学报:自然科学版,2013,36( 6): 75-77.Design optimization of front lower control arm forpassenger car on the basis of robustnessYIN XuelianR&D Center , Shanghai Huizhong Automotive Manufacturing Co ., Ltd ., Shanghai 200122, China )Abstract :CAE analysis and test verification have been performed to buckling strength of the automobile frontlower control arm . The DRBFM has been conducted on the basis of failure mode . It is found out that the vertical position of ball joint center relative to control arm body is sensitive to the buckling failure mode . The design has been optimized to minimize the effect of manufacture tolerance to achieve an expected and robust failure mode as per functional demands on the basis of QFD and Taguchi method . The effectiveness has been tested and verified . The advanced planning of product quality has been performed by applying the DFSS .Keywords : Front lower control arm ; Ball joint center ; Buckling deformation ; Failure mode ; Robustness-76-。