石油钻机自动化猫道设计策略
自动化智能化石油钻井系统

引言概述:自动化智能化石油钻井系统是现代石油钻探的一项重要技术发展。
随着科技的不断进步和石油需求的增加,石油钻井行业正面临着越来越大的压力和挑战。
传统的钻井方法存在着人力成本高、效率低下、安全风险大等问题。
因此,引入自动化智能化石油钻井系统成为一种必然趋势,将为石油钻井行业带来巨大的改变。
正文内容:大点1:自动化钻井设备1.1钻井工具自动化控制系统:通过安装传感器和执行器,对钻井工具进行自动控制,实现自动起下钻、测井等操作。
这样可以提高钻探效率,减少人力成本。
1.2井下遥测系统:通过无线传输技术将井下传感器数据传输到地面,实时监测井下状态,提高钻井安全性。
同时,地面人员可以通过数据库系统对井下数据进行实时分析,优化钻井过程。
大点2:智能化钻井控制系统2.1自动化地层控制系统:通过智能算法对地层属性进行分析和预测,自动调整钻井参数,提高钻井效率和质量。
例如,根据地质信息,自动调整转速、钻压等参数,避免钻头卡钻等问题。
2.2自动化井眼质量控制系统:利用传感器监测井眼质量,自动调整钻井工具的位置和角度,确保钻井过程中的钻孔垂直度和形状的准确性。
这有助于提高井下油气采集效率。
大点3:智能化数据分析和优化系统3.1数据采集和存储系统:通过安装传感器和数据采集设备,实时采集井下各项参数数据,并将其存储在数据库中。
这为后续的数据分析和优化提供了基础。
3.2数据分析和决策支持系统:利用大数据和技术,对井下数据进行分析和建模,预测井下状况,提供决策支持。
例如,根据历史数据和预测模型,预测出最佳的钻井工艺和参数设置。
大点4:智能化设备监控和维护系统4.1机器学习技术在设备监控中的应用:利用机器学习技术,对各个设备的运行状态进行监控,并进行故障预测和维护调度。
这能够提高设备的可靠性和寿命,减少维修成本和停工时间。
4.2远程监控和维护系统:通过无线通信技术,实现远程对井下设备的监控和维护。
地面的专业维护人员可以通过遥控设备进行操作和故障处理,减少人员在井下的作业时间,降低作业风险。
自动化猫道设计在石油钻机上的应用研究
自动化猫道设计在石油钻机上的应用研究
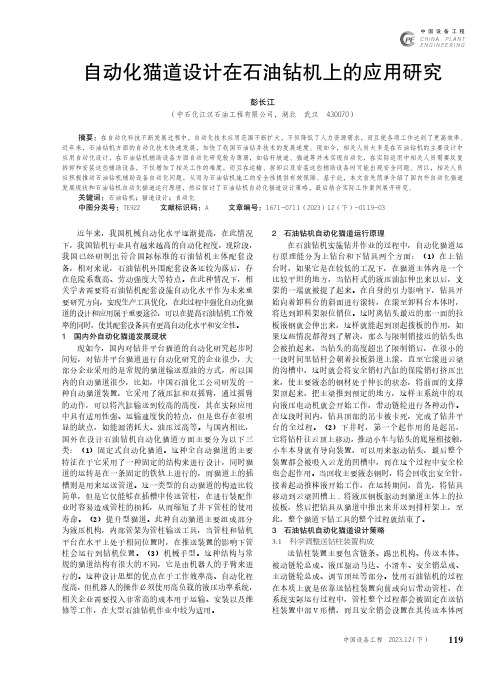
图1 动力猫道示意图
电气控制系统
在运动系统时保证参数合理非常重要,设置
的控制单元,75kW、380V/50Hz
电源。
在控制系统监控工作方面,相关人员应努力做到稳定性高和效率高,以西门子PLC相应的无线控制标准为依据,对司钻一体化控制、紧急控制、无线遥控等综合控制模式进行科学安排。
控制器运转时,若发生局部故障,则当系统具进行顶驱作业,并将钻杆下入V形槽。
当所有的钻杆型槽后,确认它和挡板非常接近时才将吊卡打开。
在这个过程中,钻杆一定要移动到与V形槽完全接触的位置。
然后,根据系统的操作规程来启动双动绞车,根据实际的使用要求将送钻柱装置降到与猫道水平面相齐的位置。
之后,根据标准进行安全销作业,作业结束后再收回。
根据说明书,并且把钻杆从V形槽中推出来。
最后,为了保证内倾斜机构稳定运行,务必将钻杆推到管排架处,然后将内倾斜机构调整到初始状态。
踢出机所示。
图3 踢出机构示意图
石油钻机自动化猫道设计应用案例
在开采某油井时相关人员使用了石油钻机猫道自动化设计方式,该油井具有如表1所示的井身结构。
表1 井身结构情况
套管外
(mm)
固井井
深(m)
水泥封固
井端(m)
套管鞋
深度(m)
层位
固井
井眼
直径
(mm)
139.77417.8
6500~
7417.8
6800.32E1-2km168.3
-7515-0.00K1bs111.1
图2 倾斜机构示意图。
动力猫道装置的研制与应用
60目前动力猫道装置主要有绞车提升式、油缸举升式和直推式3种形式。
其中,提升式和油缸举升式动力猫道基本原理相同,均利用提升输送装置至钻台完成管柱输送,仅是驱动方式不同,现场应用较多、技术相对成熟。
直推式动力猫道采用无运动输送架方式将管柱输送到钻台,位置靠近鼠洞处,工作效率高、节能效果好,主要适用于10m以上钻台,未见现场应用报道。
本文介绍的动力猫道装置,是由胜利石油工程公司钻井工艺研究院自主研发,采用绞车提升式的驱动原理,目前已经形成系列化产品,适用于ZJ30-ZJ90钻机,且在现场推广应用,应用效果良好。
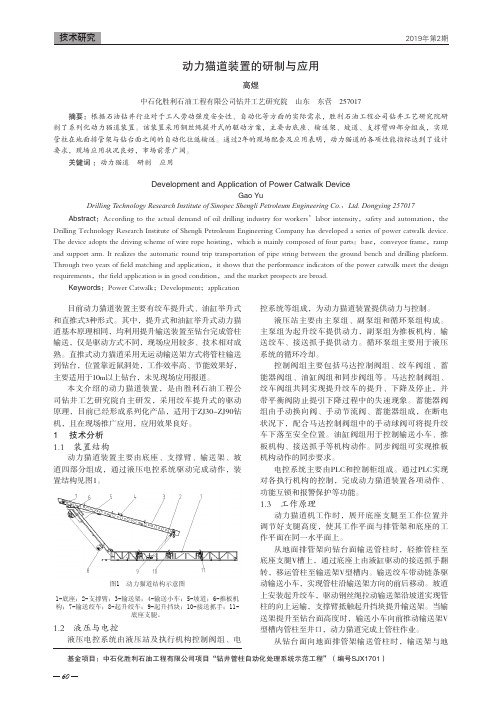
1 技术分析1.1 装置结构动力猫道装置主要由底座、支撑臂、输送架、坡道四部分组成,通过液压电控系统驱动完成动作,装置结构见图1。
图1 动力猫道结构示意图1-底座;2-支撑臂;3-输送架;4-输送小车;5-坡道;6-推板机构;7-输送绞车;8-起升绞车;9-起升挡块;10-接送抓手;11-底座支腿。
1.2 液压与电控液压电控系统由液压站及执行机构控制阀组、电控系统等组成,为动力猫道装置提供动力与控制。
液压站主要由主泵组、副泵组和循环泵组构成。
主泵组为起升绞车提供动力,副泵组为推板机构、输送绞车、接送抓手提供动力。
循环泵组主要用于液压系统的循环冷却。
控制阀组主要包括马达控制阀组、绞车阀组、蓄能器阀组、油缸阀组和同步阀组等。
马达控制阀组、绞车阀组共同实现提升绞车的提升、下降及停止,并带平衡阀防止提引下降过程中的失速现象。
蓄能器阀组由手动换向阀、手动节流阀、蓄能器组成,在断电状况下,配合马达控制阀组中的手动球阀可将提升绞车下落至安全位置。
油缸阀组用于控制输送小车、推板机构、接送抓手等机构动作。
同步阀组可实现推板机构动作的同步要求。
电控系统主要由PLC和控制柜组成。
通过PLC实现对各执行机构的控制,完成动力猫道装置各项动作、功能互锁和报警保护等功能。
1.3 工作原理动力猫道机工作时,展开底座支腿至工作位置并调节好支腿高度,使其工作平面与排管架和底座的工作平面在同一水平面上。
石油钻机猫道自动化控制探讨

石油钻机猫道自动化控制探讨随着目前我国大量油田的开采,要求积极优化钻机的使用方式。
石油钻机猫道自动化控制体系在目前很多油井开采过程中均得到了大量使用,本文对此进行了优化设计与案例分析。
1石油钻机自动化猫道优化设计1.1优化送钻柱装置构成送钻柱装置的结构主要包括主动链轮总成、安全销总成、小滑车、调节顶丝、液压驱动马达、被动链轮总成、传送本体、链条、踢出机构等部分。
管柱前进、后退工作主要是通过送钻柱装置实现的,在系统运行过程中,送钻柱装置中部V形槽中放置管柱,将安全销放置在送钻柱装置传送本体两侧位置处,以此使得管柱不会从V形槽中滚落。
通过小滑车前后运动来实现管柱的移动工作。
在拉杆的作用之下,连接链条与小滑车,在链轮转动之下促进链条活动,以此来实现小滑车的运动[1]。
1.2设置技术参数石油钻机猫道自动化控制过程中设置13.5m运输管柱最大长度,具有12~12.2m适应钻台面高度,具有508mm(20″)运输管柱最大直径、55kW最大输出功率、32880kg自重、-20~+50℃环境温度,45kN最大工作负荷、120s单根运行周期、≤90%(+20℃)相对湿度要求[2]。
1.3工作原理动力猫道具有6个部件,分别为支架、送钻柱装置、液压系统、坡道、猫道底座、绳双动绞车等。
工作时,固定于坡道背面的绳双动绞车能够带动钢丝绳在坡道顶部位置滑动,从而促进送钻柱装置在坡道方向上运动,一直到送钻柱装置能够运行至送钻柱装置,此时停止绳双动绞车运行。
利用送钻柱装置中的小滑车促进管柱前进,利用风动绞车或者顶驱等提取钻柱,此时即完成管柱提升作业。
液压站能够为小滑车与绳双动绞车提供动力,通过液压站控制系统、遥控系统即可完成整体动作过程。
系统中,坡道的构成部分为滑轮总成、坡道本体、顶滚轮总成等。
以钢丝绳导绳轮作为坡道上部的双滑轮,顶滚轮总成结构处于坡道本体上方位置,能够促进送钻柱装置向上运动以及向下运动。
猫道底座组成部分为排管架总成、托链槽、底座本体、倾斜机构、梯子等部件。
适用于中低高度钻台的液压动力猫道系统设计

—12 —石油机械CHINA PETROLEUM MACHINERY2016年第44卷第12期◄钻井技术与装备►适用于中低高度钻台的液压动力猫道系统设计王旱祥1车家琪1刘延鑫1王德良2(1.中国石油大学(华东) 2.山东科瑞石油装备有限公司)摘要:液压动力猫道一般适用于较高的钻台,而且适用钻台高度固定,调节范围有限;起升 方式多为钢丝绳牵引式,稳定性差;需要人力辅助,未实现完全意义上的自动化。
鉴于此,设计 了一种适用于中低高度钻台的液压动力猫道系统。
该系统采用刚性机械结构进行举升,对应不同 举升高度,满足中低高度钻台举升要求;对旋转臂结构进行优化,使得系统更加稳定可靠;通过 钻具架翻出机构,实现全自动化机械操作运移钻具。
试验中,系统的举升液压缸运行平稳,举升高 度误差在0.1m范围内,这表明系统满足KY720钻机钻台高度举升要求,具有较好的应用前景。
关键词:液压动力猫道;举升高度;中低高度钻台;结构优化;全自动化中图分类号:TE928 文献标识码:A doi:10. 16082/ki.issn. 1001-4578.2016. 12.003Design of the Hydraulic Power Catwalk System forLow-medium Height Drill FloorWang Hanxiang1Che Jiaqi1Liu Yanxin1Wang Deliang2(1. China University o f Petroleum (Huadong) ;2. Kerui Petroleum Equipment Manufacturing Co., Ltd.)Abstract ;Hydraulic power catwalk is generally applicable to high height drill floor with fixed drill floor height and limited adjustment range.Most lifting method of the power catwalk is wire rope traction type with poor stability and manpower assistance,which is not entirely automated.In view of this,a hydraulic power catwalk system suitable for low-medium height drilling floor has been designed.The system applies rigid mechanical structure to lift in accordance with different lifting height to meet the low-medium height drilling rig lifting requirements.Optimized shape and structure of the rotating arm makes the system more stable and reliable•Fully automated mechanical oper-ation of the drilling tool has been achieved by adopting the evagination mechanism of the drilling tool.The test results show that the lift cylinder of the system runs smoothly with the lift height error within0. 1m,which meets the requirement of drill string onto lifting KY720 drilling rig with a good application prospect.Key words:hydraulic power catwalk;lifting height;low-middle height drilling rig;structure optimization;fully automatic0引言液压动力猫道可将钻具从钻具架送到钻台面然 后再返回,实现了钻具从钻具架上、下钻台的自动 化,属于钻修机的主要配套设备,是自动化钻井系 *统的重要组成部分[1_5]。
石油钻机自动化技术的问题和建议分析
3 结束语 综上所述,我国石油钻机自动化技术在发展中仍旧存在设
备安装不规范,定制化开发不足的鲜明问题,这些都是阻碍技
科学与信息化2021年3月下 81
工业与信息化
TECHNOLOGY AND INFORMATION
术普及和推广的重要因素,对此,对自动化建设进行改造和优 化才显得更加迫在眉睫。本文通过自动化工具的开发,集成控 制系统的设计,交互式虚拟现实技术的引进,专家故障诊断系 统的优化这几个角度论述了钻机自动化技术的调整方向,充分 结合了我国石油开发的具体形势,具有理论上的合理性与实践 上的可行性。
TECHNOLOGY AND INFORMATION
工业与信息化
石油钻机自动化技术的问题和建议分析
裴红军 大庆钻探钻井一公司 黑龙江 大庆 163411
电气机械系统的智能石油应用
电气机械系统的智能石油应用随着科技的不断进步,电气机械系统在石油行业中的应用越来越广泛。
智能石油应用作为一种新兴技术,正逐步改变着石油行业的传统面貌。
本文将详细探讨电气机械系统在智能石油应用中的各个方面,包括钻探、采集、处理和运输等。
电气机械系统在钻探中的应用在石油钻探过程中,电气机械系统起着至关重要的作用。
钻机的核心部分是电动机,它通过驱动钻杆旋转来实现钻探作业。
与传统的燃油机械相比,电动钻机具有更高的能效和更低的排放。
此外,电气机械系统还可以实现对钻井参数的实时监测和调整,从而提高钻井效率和安全性。
钻探过程中,还需要对地下的地质情况进行监测和分析。
电气机械系统在这方面也发挥着重要作用。
通过地质录井仪等设备,可以实时获取地下的岩芯、岩石物理性质等信息,为钻探决策提供有力支持。
同时,这些设备还可以对钻井过程中的故障进行预警,从而降低故障风险。
电气机械系统在石油采集中的应用在石油采集过程中,电气机械系统同样发挥着重要作用。
采油设备,如抽油机、注水泵等,都是基于电气机械系统实现的。
这些设备可以提高石油开采效率,降低人力成本。
此外,电气机械系统在石油采集过程中还可以实现对油井产量的实时监测和分析。
通过智能化的监测系统,可以实时获取油井的生产数据,如产量、含水率等。
这些数据对于评估油井的生产状况、制定合理的生产策略具有重要意义。
电气机械系统在石油处理和运输中的应用在石油处理和运输过程中,电气机械系统也发挥着重要作用。
石油处理过程中,需要对石油进行脱水、脱硫等处理,这些处理过程往往依赖于电气机械设备。
同时,在石油运输过程中,电气机械系统可以实现对石油管道的实时监测和维护,确保石油运输的安全和稳定。
此外,智能化的电气机械系统还可以实现对石油储存和输送过程中的故障进行预警和处理。
例如,通过安装在石油管道上的传感器,可以实时监测管道的安全状况,及时发现和处理泄漏等故障。
电气机械系统在智能石油应用中具有广泛的应用前景。
托举式液压动力猫道钻井现场使用分析及优化方案
276随着国内石油钻机制造技术的快速发展以及机械化自动化技术的大量运用,较多的钻机自动化配套设备逐步进入到我国钻井现场。
尤其是动力猫道投入使用大大提高了钻具、套管的上下钻台操作可靠性与安全性。
未使用动力猫道的现场操作需要3~4名工人进行操作,操作上效率较低,安全上风险较大,劳动强度极高,对钻具损坏的程度高,尤其是夜间施工时视线不佳,严重影响接甩钻具施工进度。
与此同时,在进行下套管作业时需要吊车介入配合,大大增加了整个施工过程的风险性。
动力猫道投入使用之后,极大程度上解决了过去传统猫道的各项弊端,在能够高效安全完成接甩钻具工作之外,个别厂家的动力猫道同样可以投入到下套管施工当中。
这对钻井现场施工的效率提升,安全管控起到了极大的作用。
笔者所在钻井现场配有托举式液压猫道的70DB钻机,现就该类型动力猫道现场使用过程中发现的问题一一举出,将操作中的经验与设备优化的思路进行分享。
1 动力猫道类别通过大量文献的查阅,归纳出3类国内外使用的动力猫道类型。
1.1 推送式固定猫道 其猫道与坡道是固定结构,在猫道与坡道中设有V型槽轨。
利用链动装置推送V型槽轨中的滑块,从而达到推送V型槽轨中钻具上行至钻台的目的。
其优势在于机械结构相对简单,保养方便。
其缺点在于钻具在V型槽轨中滑动,摩擦力较大,对钻具的损坏程度较高[2]。
1.2 自动化机械抓臂自动化机械抓臂准确来说并不能称其为“猫道”,但其行使的职责与动力猫道相同,故笔者将其归于此类。
自动化机械抓臂的出现,使得传统猫道与坡道被取消,实现了钻具从管桥与钻台的直接运送。
自动化机械抓臂常适用于海上钻井平台或有对井场空间有特殊要求的陆地钻井平台。
其优点在于直接运送效率高,速度快,且安全。
但缺点在于安装程序复杂,维护困难,采购成本高且严重影响井队搬家的时效[3]。
1.3 托举式液压猫道托举式液压猫道采用可折叠坡道一体化设计,坡道与底座两个部分折叠即可吊装、安装与运输。
其猫道两侧有简易机械手,猫道中输送机构的V型槽轨中布有推杆与推车,极大程度上解决了钻具上下猫道的问题[4]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
石油钻机自动化猫道设计策略
背景
随着石油产业的不断发展,石油钻机自动化的水平越来越高。
在石油钻机自动化领域,大多数研究都集中在自动控制技术和智能决策算法上,而猫道(Catwalk)这一重要的装备在自动化方面的研究却比较少。
猫道作为石油钻机上的上下料平台,其设计和优化直接影响到生产效率和安全性。
猫道的作用
猫道是石油钻机上的一种上下料装置,主要用于运送、堆放和更换管柱、工具和设备等物品。
在传统的石油钻机工作模式下,工人需要手动操纵猫道进行物品的运输和停靠。
然而,这种工作方式存在工作量大、操作复杂、效率低下、安全隐患大等弊端。
猫道自动化设计的优点
智能化的猫道自动化设计不仅能够提高生产效率,同时也能够降低工人的劳动强度和提高工作安全性。
在自动化的石油钻机上,猫道自动化设计的优点主要有:
1.提高了生产效率:自动化的猫道可以自动执行上下物料的
操作,相较于传统的人工操作能够提高效率,减少生产时间,提高生产效率;
2.降低了安全风险:在传统的工作方式下,猫道操作时存在
被撞击、被压伤等风险,而自动化的猫道能够有效减少意外的发生率;
3.减轻了工人的劳动强度:石油钻机工作环境十分恶劣,工
人需要在高处和狭窄的空间内进行操作,通过猫道自动化设计能够有效减轻工人的工作强度;
4.减少人员成本:石油钻机自动化的出现,大大减少了人员
成本,避免了重复性的劳动。
猫道自动化设计方案
猫道自动化设计前置条件
要想进行猫道自动化设计,首先需要进行必要的前置条件设计。
1.硬件设备:需要给猫道安装自动化设备,比如探测器、传
感器、执行器等;
2.软件设计:需要开发适应的控制程序,包括现场数据采集、
深度学习等。
猫道自动化设计流程
针对石油钻机自动化的猫道设计,下面是其设计流程:
1.数据预处理:猫道自动化设计的第一步是进行现场数据采
集和数据预处理,包括原始数据的采集、数据清洗和特征提取等操作;
2.模型建立:在数据预处理完成后,需要进行模型建立,包
括物品检测模型、识别模型和行动规划模型等;
3.自适应学习:石油钻机工作环境复杂,自动化猫道要实现
自适应学习,学习本地条件、物品属性和人为干预等因素;
4.对接控制系统:猫道自动化设计中,模型的训练和优化需
要与石油钻机的控制系统进行对接,实现系统的闭环控制与协同控制。
猫道自动化设计实现难点
在石油钻机自动化的猫道设计中,会面临一些实现难点:
1.物品识别准确度问题:石油钻机中的物品分类较多,因此
需要对物品进行准确的识别,而物品的表面和随时间变化带来的噪声和干扰会影响识别的准确度;
2.现场条件限制影响:在钻井作业现场,机器的复杂操作受
到现场条件等方面因素的影响,会对自动化设计的实施带来困难;
3.系统稳定性问题:石油钻机自动化猫道设计需要保证系统
的稳定性,同时要避免操作失误或其他故障的出现;
4.数据采集和处理的高效性:自动化猫道设计需要大量的实
时数据进行控制或决策,因此对可靠的数据采集和处理技术有高度的依赖。
结论
随着石油钻机自动化技术的不断发展,猫道自动化设计也成为了研
究的热点。
有效的猫道自动化设计能有效提高生产效率和工作安全性,降低人员成本和工作强度,并且可以广泛应用于各个不同规模的石油
钻机设备中。
以上介绍了自动化猫道设计的方案和实现难点,期望能
够提供一些有用的指导和参考。