XV_15倾转旋翼飞机飞行控制系统概述
第五章 飞机飞行操纵系统【飞机结构】
2、传动杆的振动
传动杆会发生振动,振动的方向与传动杆的长 度垂直,因此叫做弯曲振动。
3、机翼与尾翼颤振的现象 飞机机翼与尾翼的颤振是一种非常强烈的振动。
它是一种自激振动。颤振通常会使飞机受到破坏。 4、机翼弯扭颤振
机翼发生颤振的原因如图所示:
影响颤振临界速度的因素主要有两个,即机翼 的刚度和机翼中心位置。
⑴ 机翼刚度
增大机翼扭转刚度的方法是增加机翼的蒙皮厚 度。为使蒙皮在弯曲强度中也有贡献,桁条在扭 转中也有贡献,因而发展了单块式机翼结构。在 飞机使用中,若机翼蒙皮连接处破坏,或蒙皮自 身发生裂纹,尤其是弦向裂纹,会使颤振临界速 度值降低。
3、飞机的航向操纵
飞机的航向操纵是通过脚蹬控制方向舵来实现 的。
三、中央操纵机构的机构和工作原理
飞机主操纵系统是由中央操纵机构和传动系统 两大部分组成。
㈠ 手操纵机构
手操纵机构一般分为驾驶杆式和驾驶盘式两种, 如图所示:
㈡ 脚操纵机构
脚操纵机构有脚蹬平放式和脚蹬立放式 两种。
四、传动机构的构造和工作原理 ㈠ 传动机构的构造形式
3、松紧螺套
❖ 作用:调整钢索的预张力 ❖ 注意:调松钢索时,螺杆末端不应超过小孔的位置
4、钢索张力补偿器
❖ 飞机机体外载荷及周围气 温变化会使机体结构和操 纵系统钢索产生相对变形, 导致钢索变松或过紧
❖ 变松将发生弹性间隙,过 紧将产生附加摩擦
❖ 钢索张力补偿器的功用是 保持钢索的正确张力
五、飞机飞行操纵系统的传动系数、传动比及非线 性传动机构
系统两部分。
倾转旋翼飞行器概要
倾转旋翼飞行器的论证与研究1倾转旋翼飞行器概述1.1历史沿革;倾转旋翼飞行器是一种介于固定翼飞机与普通直升机之间的一种新型飞行器。
是由直升机发展而来,是为解决直升机速度较慢问题而衍生出的一种新型结构飞行器,是未来直升机发展的必然趋势。
1.2典型应用;倾转旋翼机能完成直升机所能完成的一切任务,由于其速度快、航程远、有效载荷较大等优点,因此它特别适合执行兵员/装备突击运输、战斗搜索和救援、特种作战、后勤支援、医疗后撤、反潜等方面的任务。
除此之外,在民用运输方面,由于常规直升机经济性差、速度较小、振动大,因而作为一种运输工具受到了很大限制。
而倾转旋翼机的飞行速度与支线客机相近,可在没有机场的任何地区执行运输任务,特别适用于经济不发达地区的开发和建设,可以局部替代支线客机成为现代化空中运输网的一个重要组成部分,在商业上具有极高的价值,它不仅解决部分空港和跑道拥挤问题及边远地区的运输问题,而且其运输成本要比常规直升机和固定翼飞机低得多。
1.3倾转旋翼机定义;倾转旋翼飞行器是在机翼两端各安装一可变向的旋翼推进装置,整个推进装置可以绕机翼轴由朝上与朝前之间转动变向,并能固定在所需方向,因此能产生向上的升力或向前的推力。
倾转旋翼飞行器兼顾了固定翼飞机和直升机的优点,可以如普通直升机一样垂直起降和在空中悬停,又可以像固定翼飞机一样以较高的速度进行巡航飞行。
当旋翼飞行器推进装置垂直向上时,旋翼轴垂直于地面,呈横列式直升机飞行状态,并可在空中悬停、前后飞行和侧飞;需要平飞时,其操作系统可改变旋翼上升力的大小和旋翼升力的倾转方向,以使飞机保持或改变飞行状态。
在起飞之后,推进装置可转90度到水平位置,呈水平状态,旋翼当作拉力螺旋桨使用,像固定翼飞机一样依靠机翼产生升力飞行倾转旋翼机是一种性能独特的旋翼飞行器。
它既具有普通直升机垂直起降和空中悬停的能力,又具有涡轮螺旋桨飞机的高速巡航飞行的能力。
因为倾转旋翼飞机具有技术复杂,研制周期长,耗资巨大等特点。
第三章__飞行操纵系统
左右转动驾驶盘时,支柱不 动,升降舵不会偏转;
前推或后拉驾驶盘时,由于 和横管平行的一段钢索与轴 线a-a是重合的,钢索不会 绷紧或放松,不会使副翼偏 转。
驾驶杆
结构简单,便于操纵,但是不便于增大驾驶杆 倾斜角的的办法来减小操纵副翼时的杆力;
适用于机动性能较好而操纵时费力较小(或装 有助力器)的飞机
3.2.2 传动机构
传动机构功用:前端设备的信号传送到尾 端设备(即各个陀面)
机械传动机构类型
软式传动 硬式传动 混合传动
电传操纵机构
软式传动:靠钢索张力传递操纵力,必须
有两个钢索构成回路,轮流起作用,一根主 动,一根被动。
软式传动系统
软式传动应用
某些小型飞机 大型运输机
独 立 性 分 析 驾驶杆左右摆时,传动杆沿着以b-b线为中心轴,以c点为
顶点的锥面运动; 由于圆锥体的顶点c到底部周缘上任一点的距离相等,所
以当驾驶杆左右摆动时,摇臂1不会绕其支点前后转动, 因而升降舵不会偏转!
1. 手操纵机构
驾驶盘式手操纵机构
推、拉 左、右转动
独立性分析
升降舵; 副翼。
2. 脚操纵机构
立放式脚蹬
蹬脚蹬时,通过传动杆和摇臂等构件的传动使
方向舵偏转; 由于传动杆和摇臂等的连接,左右脚蹬的动作
是协调的!
手操纵机构与脚操纵机构的匹配
驾驶杆
平放 平放式脚蹬为了取得较大的
式脚 蹬
操纵力臂,两脚蹬之间距离
较大;
与左右活动范围较大的驾驶
杆配合使用!
驾驶盘
立放
通过增长与脚蹬连接的摇
式脚 蹬
臂来获得足够的操纵力臂
飞行操纵系统
钢索承受拉力时,容易伸长。由于操纵系统的弹 性变形而产生的“间隙”称为弹性间隙;
钢索的弹性间隙太大,会降低操纵的灵敏性; 解决:钢索预紧
② 钢索缺点及解决办法(软式传动缺点)
钢索预加张力随温度变化
飞机机体外载荷及周围气温变化会使机体结构和操纵 系统钢索产生相对变形,导致钢索变松或过紧。
构造复杂, 重量加大; 难于“绕”过机内设备; 易与发动机发生共振!
混 兼有硬式和软式的优点和缺点! 合
1. 软式传动机构主要构件
(1)钢索
钢索由钢丝编成,只承受拉力,不能承受压力。在软式传动机构中, 用两根钢索构成回路,以保证舵面能在两个相反的方向偏转.
①构 造 和 规 格
② 钢索缺点及解决办法(软式传动缺点)
驾驶盘
结构复杂,但可以从过增大驾驶盘的转角,使 操纵副翼胜利,但是时间长;
适用于操纵时费力较大而机动性能要求较低的 中型和大型飞机
2. 脚操纵机构
平放式脚蹬
脚蹬安装在由两根横杆和两 根脚蹬杆组成的平行四边形
机构上; 平行四边形机构的作用:
保证在操纵方向舵时,脚蹬 只作平移而不转动,便于飞 行员操纵。
自动驾驶仪; 发动机油门自动控制
结构振动模态抑制系统。
(2)根据信号传递方式
机械操纵系统
钢索、传动杆等机械部件传递 电缆传递
电传操纵系统
(3)根据驱动舵面运动方式
简单机械操纵系统(无助力) 助力操纵系统
液压助力(有回力/无回力) 电驱动
(4)根据舵面的类型
主操纵系统
副翼 升降舵 方向舵
2. 脚操纵机构
立放式脚蹬
蹬脚蹬时,通过传动杆和摇臂等构件的传动使
飞机飞行控制系统
飞机飞行控制系统飞行控制系统(简称飞控系统)的作用是保证飞机的稳定性和操纵性,提高飞机飞行性能和完成任务的能力,增强飞行的安全性和减轻驾驶员的工作负担。
3.4.1. 飞行控制系统概述飞控系统分类飞控系统分为人工飞行控制系统和自动飞行控制系统两大类。
由驾驶员通过对驾驶杆和脚蹬的操纵实现控制任务的系统,称为人工飞行控制系统。
最简单的人工飞行控制系统就是机械操纵系统。
不依赖于驾驶员操纵驾驶杆和脚蹬指令而自动完成控制任务的飞控系统,称为自动飞行控制系统。
自动驾驶仪是最基本的自动飞行控制系统。
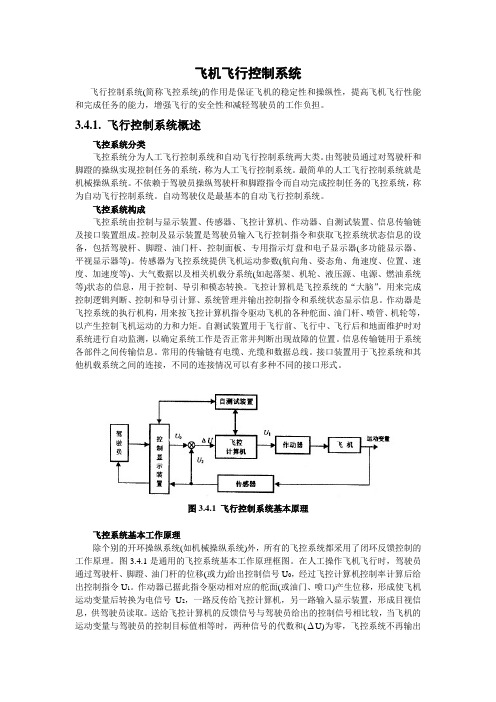
飞控系统构成飞控系统由控制与显示装置、传感器、飞控计算机、作动器、自测试装置、信息传输链及接口装置组成。
控制及显示装置是驾驶员输入飞行控制指令和获取飞控系统状态信息的设备,包括驾驶杆、脚蹬、油门杆、控制面板、专用指示灯盘和电子显示器(多功能显示器、平视显示器等)。
传感器为飞控系统提供飞机运动参数(航向角、姿态角、角速度、位置、速度、加速度等)、大气数据以及相关机载分系统(如起落架、机轮、液压源、电源、燃油系统等)状态的信息,用于控制、导引和模态转换。
飞控计算机是飞控系统的“大脑”,用来完成控制逻辑判断、控制和导引计算、系统管理并输出控制指令和系统状态显示信息。
作动器是飞控系统的执行机构,用来按飞控计算机指令驱动飞机的各种舵面、油门杆、喷管、机轮等,以产生控制飞机运动的力和力矩。
自测试装置用于飞行前、飞行中、飞行后和地面维护时对系统进行自动监测,以确定系统工作是否正常并判断出现故障的位置。
信息传输链用于系统各部件之间传输信息。
常用的传输链有电缆、光缆和数据总线。
接口装置用于飞控系统和其他机载系统之间的连接,不同的连接情况可以有多种不同的接口形式。
图3.4.1 飞行控制系统基本原理飞控系统基本工作原理除个别的开环操纵系统(如机械操纵系统)外,所有的飞控系统都采用了闭环反馈控制的工作原理。
图3.4.1是通用的飞控系统基本工作原理框图。
倾转旋翼飞行器构型
倾转旋翼飞行器是一种同时具备直升机和固定翼飞机特点的新型飞行器。
其构型主要包括机翼和旋翼系统。
机翼负责提供飞行器在旋翼模式和固定翼模式下的升力,而旋翼系统则负责提供飞行器在旋翼模式下的飞行控制和悬停能力。
旋翼系统是倾转旋翼飞行器的核心部分,它可以在垂直位置和水平位置之间转动。
在直升机模式下,旋翼系统呈垂直状态,提供飞行器的升力并实现垂直起降、悬停、侧飞和后飞等飞行操作。
而在固定翼飞机模式下,旋翼系统呈水平状态,提供飞行器的推进力,使飞行器能够进行高速远程飞行。
倾转旋翼飞行器的构型可以根据实际需求进行优化和调整,例如通过改变机翼和旋翼系统的设计、材料和制造工艺等,来提高飞行器的性能、稳定性和安全性。
以上内容仅供参考,如需更专业全面的信息,建议查阅航空航天类书籍或咨询航空专家。
02-小型无人倾转旋翼机飞行操纵控制系统研究(郭剑东)

第二十四届(2008)全国直升机年会论文小型无人倾转旋翼机飞行操纵控制系统研究郭剑东 宋彦国 夏品奇(南京航空航天大学 直升机旋翼动力学重点实验室,南京 210016)摘 要: 本文通过研究倾转旋翼机的飞行动力学模型,建立了小型无人倾转旋翼机在直升机、倾转及飞机飞行模式的飞行力学模型。
仿真计算得出配平工作点处各通道的操纵量和飞行器的飞行姿态,并提取了工作点处的线性模型。
采用特征结构配置理论实现了小型倾转旋翼机的角速率解耦控制(RCAH ),在各通道解耦的基础上利用经典控制理论完成了姿态保持控制(ACAH )。
通过仿真结果表明设计的控制系统具有良好的指令跟踪性能。
关键词:倾转旋翼机;非线性方程;特征结构配置;引 言倾转旋翼机属于垂直起降飞行器(VTOL :Vertical Take-Off and Landing )的一个重要分支,兼有直升机和飞机的优点,具有直升机垂直起降和空中悬停,固定翼飞机高速前飞的特点[1、2]。
飞行模式多样,具有直升机飞行模式、过渡飞行模式和飞机飞行模式,过渡飞行模式的操纵与控制技术是亟待解决的关键技术。
近年来我国十分重视倾转旋翼机相关技术的发展和理论知识的积累。
本文针对小型无人倾转旋翼机建立了全量非线性飞行动力学数学模型,并在Matlab 的Simulink 的仿真环境中建立飞行力学仿真模型,展开该飞行器飞行性能与操纵控制策略的仿真。
1 小型无人倾转旋翼机飞行动力学模型 1.1 数学模型分析该飞行器飞行操纵控制策略的基础是系统的飞行动力学数学模型。
在分析时假定小型倾转旋翼机为刚体,在空中的运动有6个自由度,即质心的3个移动自由度和绕质心的3个转动自由度。
其机体坐标系如图1所示。
分别建立倾转旋翼机的旋翼、机翼、发动机短舱、机身、平尾、垂尾的风轴坐标系,在各自坐标系中计算气动力及力矩,最后将力及力矩通过坐标转换至重心,各部件的计算方法参考[3、4],合外力及外力矩分别为:),,(,,z y x i M F i i =即),,(z y x i = (1)其中,下标ir 表示右旋翼,il 表示左旋翼,iw 表示机翼(包括副翼),ip 表示发动机短舱,if 表示机身,ih 表示平尾(包括升降舵),iv 表示垂尾(包括方向舵)。
飞机操纵系统介绍课件

检查舵面和舵机
检查舵面是否有损伤,舵机工 作是否正常。
清洁和润滑
定期对操纵系统进行清洁和润 滑,以减少磨损和卡滞。
飞机操纵系统的定期维护保养
01
02
03
04
详细检查
对操纵系统进行详细检查,包 括检查舵机和连杆的磨损情况
、润滑情况等。
更换磨损部件
对磨损严重的部件进行更换, 如轴承、密封圈等。
测试系统性能
滚转和偏航运动。
传动机构
包括钢索、滑轮、连杆 和传动杆等,将飞行员
的操作传递到舵面。
舵面
包括升降舵、方向舵和 副翼等,用于控制飞机
的飞行姿态。
辅助控制系统
包括调整片、襟翼和缝 翼等,用于辅助控制飞 机的飞行姿态和性能。
CHAPTER 02
飞机操纵系统的种类与特点
机械操纵系统
机械操纵系统是通过钢索、滑轮、连 杆等机械传动机构,将飞行员施加的 操作力传递到舵面,实现飞机姿态和 航向控制的系统。
然而,机械操纵系统也存在操作力大 、飞行员负担重、响应速度慢等缺点 。
机械操纵系统具有结构简单、可靠性 高、成本低等优点,因此在早期的飞 机上广泛应用。
助力操纵系统
助力操纵系统是在机械操纵系统的基础上,通 过引入液压、气压等助力装置,减轻飞行员的 操作力,实现更轻松、快速的操作。
助力操纵系统广泛应用于现代运输机和战斗机 上,能够提高飞行员的舒适性和操作效率。
飞机操纵系统的安全性与可靠性提升
冗余设计
通过增加备份和冗余系统,提高飞机操纵系统的可靠性和容错能力,确保飞行安 全。
健康监测与故障诊断
利用传感器和监测技术,实时监测飞机操纵系统的状态,及时发现和诊断故障, 采取相应的维护措施。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:10071385(2005)03001203
XV-15倾转旋翼飞机飞行控制系统概述
朱源
(南京航空航天大学自动化学院,江苏南京210016)
摘要:XV-15倾转旋翼飞机兼有直升机垂直起降、空中悬停及固定翼飞机高速巡航的优点,因
而在军用和民用飞机中有着广泛的应用前景。
XV-15的机体结构和普通飞机一样,但在翼尖安
装可以倾转的发动机短舱和旋翼。
该飞机控制系统结合旋翼控制和固定翼控制,通过自动控制
系统和推力管理系统来辅助飞行员对飞机的控制。
主要介绍了主飞行控制系统和辅助控制系统
的控制特点。
关键词:倾转旋翼飞机;主飞行控制系统;辅助飞行控制系统
中图分类号:V275+.1文献标识码:B
XV-15倾转旋翼飞机既能像直升机一样垂直起降及空中悬停,又能像固定翼飞机一般巡航飞行,因此倍受航空界的关注。
它独有的气动布局是安装在翼尖的直径为25英尺的三片桨叶组成的旋翼和发动机短舱。
发动机短舱可以旋转95b,从而使飞机由悬停模态转换到巡航模态,巡航时最高速度可达300海里/时。
倾转旋翼飞机特有的可旋转的发动机短舱使它具有3个飞行模态:直升机模态(发动机短舱垂直向上)、固定翼飞机模态(发动机短舱水平向前)和倾转模态。
为了使倾转旋翼飞机能更好地在3个模态间转换,飞行控制系统将旋翼控制和固定翼控制结合在一起。
飞行控制系统由主要飞行控制系统、辅助飞行控制系统、自动控制系统和推力管理系统组成。
下面主要介绍飞行控制系统和辅助飞行控制系统。
1主飞行控制系统
(1)俯仰控制
倾转旋翼飞机的纵向姿态主要是通过前后移动驾驶杆(X LN)来控制的。
直升机模态下,前后移动驾驶杆,不仅使旋翼的纵向周期变距成比例地变化,同时升降舵的偏移量也成比例变化。
随着发动机短舱由垂直转到水平位置,飞机由直升机模态转换到固定翼模态,纵向周期变距也通过机械连杆机构逐渐退出控制系统。
纵向周期变距
收稿日期:20050517
作者简介:朱源(1982),女,江苏泰兴人,在读硕士随发动机短舱位置变化的控制过程如图1所示。
舵面控制在所有的飞行模态下,始终与杆位移量成比例。
各种类型控制及控制量如表1所示。
(2)滚转控制
倾转旋翼飞机的侧向姿态主要是通过侧向移动驾驶杆(X LT)控制的。
直升机模态下,侧向移动驾驶杆,产生差动的总距变化,使得两旋翼间产生差动的推力,同时偏转襟副翼。
差动总距通过装在机翼中间的总距混合控制箱,随着发动机短舱倾角的变化逐渐退出控制系统,如图一所示。
XV -15飞机使用全尺寸的襟翼,飞机对称面外65%的襟翼同时起到襟副翼的作用。
在襟翼偏转时,襟副翼差动偏转(多数上偏),从而提高了偏转有效性。
固定翼飞机模态下,少量的差动总距辅助襟副翼,使飞机滚转,并通过让飞机滚转,使它能更好地偏航。
(3)偏航控制
倾转旋翼飞机主要通过脚蹬来控制飞机的航向。
踏板偏移量使旋翼产生差动纵向周期变距,一个旋翼平面前倾,另一个后倾。
差动周期变距通过安装在机翼中间的周期变距混合控制盒,随发动机短舱倾角和空速变化,逐渐退出控制系统。
在所有的飞行模态下,方向舵的偏移量始终和脚蹬偏离中立位置量成比例。
(4)推力控制
倾转旋翼飞机主要通过上下拉动推力杆(X COL)来控制推力。
推力杆移动的同时增加或减少发动机功率,并根据飞机的飞行模态,改变旋翼总距角。
随着发动机起动和检测,每一个油门杆
2005年6月第22卷第3期
沈阳航空工业学院学报
Journa l o f Shenyang Institute of A eronauti ca l Eng i neer i ng
Jun.2005
V o.l22N o.3
都闩在推力杆上。
推力杆通过油门连接,设定每个发动机的能量。
油门联动装置不受发动机短舱角度的影响。
推力杆通过总距混合控制盒控制总距变化。
直升机模态下,推力杆改变总距,使飞机有更好的机动性能,并直接控制垂直升力。
固定翼飞机模态下,推力杆如传统的螺旋桨飞机一般,仅改变发动机功率。
一定的推力杆位移下,总距随发动机短舱倾角变化的响应如图1。
桨距控制系统控制总距,使旋翼在所有的飞行模态下保持一定的转速。
控制器设定的总距角权限(H OG )如图1所示。
2 辅助飞行控制系统
(1)襟翼控制
襟翼是常规设计,并通过电传控制的。
它们是全尺寸的,在飞机对称面外的部分同时起到襟副翼的作用。
全尺寸襟翼主要用于减少机翼平面面积,使飞机在悬停时降低6.5%的负载,从而增加升力。
襟翼的控制是通过手工控制安装在中心控制台的襟翼开关。
襟翼有4种有效设置:巡航(0b ),高速飞行(20b ),倾转(40b )和低速/悬停
(75b )。
襟翼和襟副翼的偏转量如表一所示。
(2)倾转系统控制
倾转系统将旋翼/推力系统作为一个整体转动,在0b ~95b 范围内控制发动机短舱按要求旋转。
倾转是通过安装在推力杆上的开关控制的。
向前移动开关,发动机短舱向前旋转,从直升机模态转为固定翼模态;向后移动开关,使旋翼/推力系统回到直升机模态。
一般转换时间为11秒。
倾转系统包括安装在每个发动机短舱内的倾转助动器;装在前梁前面的互连轴;安装在机身内部前梁上的相位减速器。
每个倾转助动器由液压驱动,液压阀由单独的电源控制。
如果由于液压源或电源故障,使得一侧的助动器不能工作,该侧的旋翼/推力系统可通过互连的倾转轴由另一侧的助动器驱动。
第三个安装在相位减速器内的液压发动机,由第三个液压源驱动。
当前两个液压驱动的助动器发动机发生故障时,则使用第三个液压发动机。
如果整个电源系统故障,就使用机械备用系统。
机械备用系统是通过拉安装在驾驶舱内的T 形操纵杆,然后驱动液压阀,使作动器带
动发动机短舱旋转。
图1 XV -15控制过程
第3期 朱源:XV -15倾转旋翼飞机飞行控制系统设计 13
表1飞行控制系统
轴俯仰滚转偏航推力倾转
主要飞行控制
旋翼控制
类型战斗机总距差动总距差动周期变距总距
偏转角度(度)?10.0(1)?3.0(1)?4.0(1)13.8(1)
舵面控制
类型升降舵襟副翼方向舵油门
偏转角度(度)?20.023.8,-13.8?20.042.0~105.0
飞行员控制
类型驾驶杆驾驶杆脚踏推力杆位移量(英尺)?4.8?4.8?2.50.0~10.0辅助控制
类型襟翼襟副翼发动机短舱倾转偏转角度(度)0~75.00~47.00~95.0
(1)直升机模态
3结束语
本文主要论述了XV-15倾转旋翼飞机的主要飞行控制和辅助控制系统。
XV-15倾转旋翼飞机飞行控制设计的基本思想是使飞行员在所有飞行模态下的工作负担降到最低,并能提供一般的控制特性。
XV-15控制系统结合了直升机和固定翼飞机的基本控制要素,同时以自动控制系统和推力管理系统为补充。
参考文献:
[1]Goldstei n,K.W.,Doo l ey,L.W.V-22Control La w Developm ent
[C].AHS42nd A nnua lForum,W as h i ngton,D.C,1986,6
[2]DanielC.Dugan,Ronal d G.E rhart,Lau relG.Sch roers,The XV-
15T ilt Rot or Research A i rcraft[R].NASA TM81244S epte m ber 1980,9
[3]C alise,A.J.,Rysdyk,R.T.R esearch i n N on li near F li gh t Con trol
f or T iltrotor A ircraftOperati n
g i n t
h e ter m
i nalArea[R].NASA NCC
-2-922,1996,11
F light control syste m develop m e nt for t he
XV-15tiltrotor aircraft
Z HU Yuan
(Anto m atic co llege N anji n g U niversity o fA eronautics and Astronautics,Ji a ngsu Nan ji n g210016)
Abst ract:The XV-15T iltrotor a ircraft fli g ht control syste m co m b i n es bo t h r o tor and fixed surface contro ls.The pil o t contro ls the aircra ft is supple m ented by an Auto m atic Flight Control Syste m(AFCS)and a Thr ust/Pow er M anage m ent Syste m.A description of the pri m ary fli g ht contr o l syste m and secondary flight contr o l syste m is presented.
K eywords:tiltrotor;flight contro;l XV-15
14沈阳航空工业学院学报第22卷。