启发式搜索 A
启发式搜索A星算法
启发式搜索——初识A*算法A*在游戏中有它很典型的用法,是人工智能在游戏中的代表。
A*算法在人工智能中是一种典型的启发式搜索算法,为了说清楚A*算法,先说说何谓启发式算法。
一、何谓启发式搜索算法在说它之前先提提状态空间搜索。
状态空间搜索,如果按专业点的说法,就是将问题求解过程表现为从初始状态到目标状态寻找这个路径的过程。
通俗点说,就是在解一个问题时,找到一个解题的过程,应用这个过程可以从求解的开始得到问题的结果。
由于求解问题的过程中分支有很多,主要是求解过程中求解条件的不确定性、不完备性造成的,使得求解的路径很多,这样就构成了一个图,我们说这个图就是状态空间。
问题的求解实际上就是在这个图中找到一条路径可以从开始到结果。
这个寻找的过程就是状态空间搜索。
常用的状态空间搜索有深度优先和广度优先。
广度优先是从初始状态一层一层向下找,直到找到目标为止。
深度优先是按照一定的顺序,先查找完一个分支,再查找另一个分支,直至找到目标为止。
这两种算法在数据结构书中都有描述,可以参看这些书得到更详细的解释。
前面说的广度和深度优先搜索有一个很大的缺陷就是:他们都是在一个给定的状态空间中穷举。
这在状态空间不大的情况下是很合适的算法,可是当状态空间十分大,且不可预测的情况下就不可取了。
他们的效率实在太低,甚至不可完成。
在这里就要用到启发式搜索了。
启发式搜索就是在状态空间中搜索时,对每一个搜索的位置进行评估,得到最好的位置,再从这个位置进行搜索直至找到目标。
这样可以省略大量无谓的搜索路径,提高了效率。
在启发式搜索中,对位置的估价是十分重要的。
采用了不同的估价可以有不同的效果。
我们先看看估价是如何表示的。
启发中的估价是用估价函数表示的,如:f(n) = g(n) + h(n)其中f(n)是节点n的估价函数,g(n)是在状态空间中从初始节点到n节点的实际代价,h(n)是从n节点到目标节点最佳路径的估计代价。
在这里主要是h(n)体现了搜索的启发信息,因为g(n)是已知的。
人工智能a算法
人工智能a算法
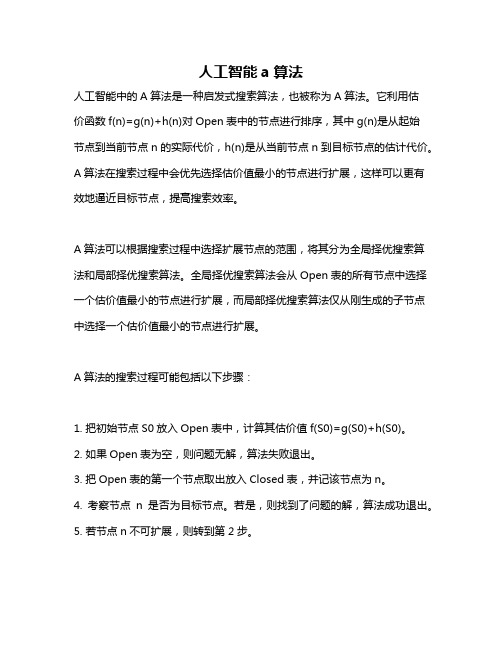
人工智能中的A算法是一种启发式搜索算法,也被称为A算法。
它利用估
价函数f(n)=g(n)+h(n)对Open表中的节点进行排序,其中g(n)是从起始
节点到当前节点n的实际代价,h(n)是从当前节点n到目标节点的估计代价。
A算法在搜索过程中会优先选择估价值最小的节点进行扩展,这样可以更有效地逼近目标节点,提高搜索效率。
A算法可以根据搜索过程中选择扩展节点的范围,将其分为全局择优搜索算法和局部择优搜索算法。
全局择优搜索算法会从Open表的所有节点中选择一个估价值最小的节点进行扩展,而局部择优搜索算法仅从刚生成的子节点中选择一个估价值最小的节点进行扩展。
A算法的搜索过程可能包括以下步骤:
1. 把初始节点S0放入Open表中,计算其估价值f(S0)=g(S0)+h(S0)。
2. 如果Open表为空,则问题无解,算法失败退出。
3. 把Open表的第一个节点取出放入Closed表,并记该节点为n。
4. 考察节点n是否为目标节点。
若是,则找到了问题的解,算法成功退出。
5. 若节点n不可扩展,则转到第2步。
6. 扩展节点n,生成子节点ni(i=1,2,…… ),计算每一个子节点的估价值f(ni) (i=1,2,……)。
7. 把子节点放入Open表中,并根据估价值进行排序。
8. 重复步骤2-7,直到找到目标节点或Open表为空。
总之,人工智能中的A算法是一种有效的人工智能搜索策略,它可以用于解决许多不同的问题,例如路径规划、机器人控制、游戏AI等。
A算法ppt课件
f(S2)=d(S2)+W(S2)=2+2=4 从图1还可以看出,该问题的解为 S0 →S1 →S2 →S3 →Sg
5
图1 八数码难题的全局择优搜索树
6
7
2.局部择优搜索
对这一算法进一步分析也可以发现:如果取估 价函数f(n)=g(n),则它将退化为代价树的深度 优先搜索;如果取估价函数f(n)=d(n),则它将 退化为深度优先搜索。可见,深度优先搜索和 代价树的深度优先搜索是局部择优搜索的两个 特例。
9
A*算法
上一节讨论的启发式搜索算法,都没有 对估价函数f(n)做任何限制。实际上,估 价函数对搜索过程是十分重要的,如果 选择不当,则有可能找不到问题的解, 或者找到的不是问题的最优解。为此, 需要对估价函数进行某些限制。A*算法 就是对估价函数加上一些限制后得到的 一种启发式搜索算法。
退出; (5)若节点n不可扩展,则转到第(2)步; (6)扩展节点n,生成子节点ni(i=1,2,……),计算每一个子节点的
估价值f(ni) (i=1,2,……),并按估价值从小到大的顺序依次放入 Open表的首部,并为每一个子节点设置指向父节点的指针,然后 转第(2)步。
8
由于这一算法的第六步仅仅是把刚生成的子节 点按其估价函数值从小到大放入Open表中,这 样在算法第(3)步取出的节点仅是刚生成的子节 点中估价函数值最小的一个节点。因此,它是 一种局部择优的搜索方式。
2
1. 全局择优搜索
在全局择优搜索中,每当需要扩展节点时,总是从Open表的所有节点中 选择一个估价函数值最小的节点进行扩展。其搜索过程可能描述如下:
A算法在路径规划中的应用
A算法在路径规划中的应用路径规划是人工智能领域的一个核心问题,它在许多实际应用中发挥着重要的作用。
A算法(A* Algorithm)作为一种常用的搜索算法,被广泛用于路径规划中。
本文将探讨A算法在路径规划中的应用。
一、A算法简介A算法是一种启发式搜索算法,用于在图形结构的网络中寻找从起始节点到目标节点的最短路径。
与传统的搜索算法相比,A算法利用了启发式函数来评估每个节点的优先级,从而更加高效地搜索最优路径。
它结合了广度优先搜索和贪心算法的优点,能够在较短的时间内找到近似最优解。
二、A算法的工作原理A算法采用了一种启发式评估函数(Heuristic Evaluation Function),该函数用来估计从当前节点到目标节点的代价。
一般情况下,这个启发式评估函数采用欧几里得距离、曼哈顿距离等方式进行计算。
A算法根据节点的代价和启发式评估函数的值选择下一个最优的节点进行扩展,直到找到目标节点或者遍历完所有可能的节点。
三、A算法在路径规划中的应用案例A算法在路径规划中有着广泛的应用,下面以智能车辆路径规划为例进行说明。
智能车辆路径规划是一个典型的实时路径规划问题。
智能车辆需要通过传感器获取当前位置和周围环境信息,并根据这些信息选择最优的路径到达目的地。
A算法能够快速找到最短路径,适用于智能车辆路径规划。
智能车辆路径规划中,A算法的步骤如下:1. 初始化启发式评估函数和起始节点,将起始节点加入open列表。
2. 通过启发式评估函数计算起始节点到目标节点的代价,并更新起始节点的优先级。
3. 从open列表中选择优先级最高的节点,将其加入close列表。
4. 如果选择的节点是目标节点,则路径规划结束;否则,继续扩展该节点的相邻节点。
5. 对每个相邻节点计算代价和优先级,并更新open列表。
6. 重复步骤3至5,直到找到目标节点或者open列表为空。
通过以上步骤,A算法可以寻找到智能车辆从起始点到目标点的最短路径,并且具备实时性和高效性。
启发式搜索A星算法
启发式搜索——初识A*算法A*在游戏中有它很典型的用法,是人工智能在游戏中的代表。
A*算法在人工智能中是一种典型的启发式搜索算法,为了说清楚A*算法,先说说何谓启发式算法。
一、何谓启发式搜索算法在说它之前先提提状态空间搜索。
状态空间搜索,如果按专业点的说法,就是将问题求解过程表现为从初始状态到目标状态寻找这个路径的过程。
通俗点说,就是在解一个问题时,找到一个解题的过程,应用这个过程可以从求解的开始得到问题的结果。
由于求解问题的过程中分支有很多,主要是求解过程中求解条件的不确定性、不完备性造成的,使得求解的路径很多,这样就构成了一个图,我们说这个图就是状态空间。
问题的求解实际上就是在这个图中找到一条路径可以从开始到结果。
这个寻找的过程就是状态空间搜索。
常用的状态空间搜索有深度优先和广度优先。
广度优先是从初始状态一层一层向下找,直到找到目标为止。
深度优先是按照一定的顺序,先查找完一个分支,再查找另一个分支,直至找到目标为止。
这两种算法在数据结构书中都有描述,可以参看这些书得到更详细的解释。
前面说的广度和深度优先搜索有一个很大的缺陷就是:他们都是在一个给定的状态空间中穷举。
这在状态空间不大的情况下是很合适的算法,可是当状态空间十分大,且不可预测的情况下就不可取了。
他们的效率实在太低,甚至不可完成。
在这里就要用到启发式搜索了。
启发式搜索就是在状态空间中搜索时,对每一个搜索的位置进行评估,得到最好的位置,再从这个位置进行搜索直至找到目标。
这样可以省略大量无谓的搜索路径,提高了效率。
在启发式搜索中,对位置的估价是十分重要的。
采用了不同的估价可以有不同的效果。
我们先看看估价是如何表示的。
启发中的估价是用估价函数表示的,如:f(n) = g(n) + h(n)其中f(n)是节点n的估价函数,g(n)是在状态空间中从初始节点到n节点的实际代价,h(n)是从n节点到目标节点最佳路径的估计代价。
在这里主要是h(n)体现了搜索的启发信息,因为g(n)是已知的。
a算法求解八数码问题 实验报告
题目: a算法求解八数码问题实验报告目录1. 实验目的2. 实验设计3. 实验过程4. 实验结果5. 实验分析6. 实验总结1. 实验目的本实验旨在通过实验验证a算法在求解八数码问题时的效果,并对其进行分析和总结。
2. 实验设计a算法是一种启发式搜索算法,主要用于在图形搜索和有向图中找到最短路径。
在本实验中,我们将使用a算法来解决八数码问题,即在3x3的九宫格中,给定一个初始状态和一个目标状态,通过移动数字的方式将初始状态转变为目标状态。
具体的实验设计如下:1) 实验工具:我们将使用编程语言来实现a算法,并结合九宫格的数据结构来解决八数码问题。
2) 实验流程:我们将设计一个初始状态和一个目标状态,然后通过a 算法来求解初始状态到目标状态的最短路径。
在求解的过程中,我们将记录下每一步的状态变化和移动路径。
3. 实验过程我们在编程语言中实现了a算法,并用于求解八数码问题。
具体的实验过程如下:1) 初始状态和目标状态的设计:我们设计了一个初始状态和一个目标状态,分别为:初始状态:1 2 34 5 67 8 0目标状态:1 2 38 0 42) a算法求解:我们通过a算法来求解初始状态到目标状态的最短路径,并记录下每一步的状态变化和移动路径。
3) 实验结果在实验中,我们成功求解出了初始状态到目标状态的最短路径,并记录下了每一步的状态变化和移动路径。
具体的实验结果如下:初始状态:1 2 34 5 67 8 0目标状态:1 2 38 0 47 6 5求解路径:1. 上移1 2 37 8 62. 左移1 2 3 4 0 5 7 8 63. 下移1 2 3 4 8 5 7 0 64. 右移1 2 3 4 8 5 0 7 65. 上移1 2 3 0 8 5 4 7 61 2 38 0 54 7 67. 下移1 2 38 7 54 0 68. 右移1 2 38 7 54 6 0共计8步,成功从初始状态到目标状态的最短路径。
A搜索算法
2
3
8
4
6
5
F (6 )
2
8
3
1
4
7
6
5
J (7 )
2
3
1
8
4
7
6
5
7
5.4.3 A搜索算法
open表和closed表内状态排列的变化情况
8
5.4.3 A搜索算法
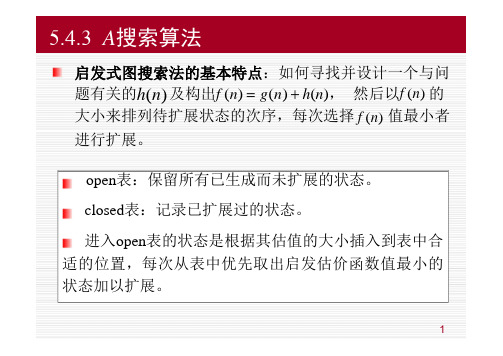
启发式图搜索法的基本特点:如何寻找并设计一个与问
题有关的h(n) 及构出f (n) g(n) h(n), 然后以f (n) 的
大小来排列待扩展状态的次序,每次选择 f (n) 值最小者 进行扩展。
open表:保留所有已生成而未扩展的状态。 closed表:记录已扩展过的状态。 进入open表的状态是根据其估值的大小插入到表中合 适的位置,每次从表中优先取出启发估价函数值最小的 状态加以扩展。
4
5.4.3 A搜索算法
A(-5)
B(-3)
C(-4)
D(-6)
E(-5) F(-3) G(-4) H(-3)
I
J
K L(-5) M(-5) N O(-2) P(-3)
Q
R
S
T
U(-3)
5
5.4.3 A搜索算法
例5.8 利用A搜索算法求解八数码问题的搜索树,其估价函 数定义为
f (n) d (n) w(n)
begin
将该子状态从closed表移到open表中;
记录更短路径走向及其估价函数值;
end;
case end;
将n放入closed表中;
根据估价函数值,从小到大重新排列open表;
end;
*open表中结点已耗尽
人工智能a算法

1.启发式搜索算法A启发式搜索算法A,一般简称为A算法,是一种典型的启发式搜索算法。
其基本思想是:定义一个评价函数f,对当前的搜索状态进行评估,找出一个最有希望的节点来扩展。
评价函数的形式如下:f(n)=g(n)+h(n)其中n是被评价的节点。
f(n)、g(n)和h(n)各自表述什么含义呢?我们先来定义下面几个函数的含义,它们与f(n)、g(n)和h(n)的差别是都带有一个"*"号。
g*(n):表示从初始节点s到节点n的最短路径的耗散值;h*(n):表示从节点n到目标节点g的最短路径的耗散值;f*(n)=g*(n)+h*(n):表示从初始节点s经过节点n到目标节点g的最短路径的耗散值。
而f(n)、g(n)和h(n)则分别表示是对f*(n)、g*(n)和h*(n)三个函数值的的估计值。
是一种预测。
A算法就是利用这种预测,来达到有效搜索的目的的。
它每次按照f(n)值的大小对OPEN表中的元素进行排序,f值小的节点放在前面,而f值大的节点则被放在OPEN表的后面,这样每次扩展节点时,都是选择当前f值最小的节点来优先扩展。
利用评价函数f(n)=g(n)+h(n)来排列OPEN表节点顺序的图搜索算法称为算法A。
过程A①OPEN:=(s),f(s):=g(s)+h(s);②LOOP:IF OPEN=()THEN EXIT(FAIL);③n:=FIRST(OPEN);④IF GOAL(n)THEN EXIT(SUCCESS);⑤REMOVE(n,OPEN),ADD(n,CLOSED);⑥EXPAND(n)→{mi},计算f(n,mi)=g(n,mi)+h(mi);g(n,mi)是从s通过n到mi的耗散值,f(n,mi)是从s通过n、mi到目标节点耗散值的估计。
·ADD(mj,OPEN),标记mi到n的指针。
·IF f(n,mk)<f(mk)THEN f(mk):=f(n,mk),标记mk到n的指针;比较f(n,mk)和f(mk),f(mk)是扩展n 之前计算的耗散值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
The heuristic search algorithm
Yx-Kx Yx (Nxx University of Technology, Nixx 3xx00, China) Abstract: abstract content (including purpose, method, result and conclusion four elements) of artificial intelligence to solve the problem is mostly unstructured or poorly structured problems, can improve the efficiency of heuristic search polar. The basic idea of this paper with eight digital problem as an example to explain the heuristic search algorithm. Through the search and violence than we found the heuristic search is efficient There is nothing comparable to this. Heuristic search is bound to play an important role in the field of artificial intelligence. Keywords: A*; heuristic search; best first search; evaluation function;
int dx,dy=0; string s="283064175"; string s0=s; temp.priority=Wcount(s) + 0; temp.value=s; temp.pre=0; q.push(temp); //第一个节点入队 V.insert(s);//加入已搜索的队列 if(isOver(s)) return s; OutPut(s); while(!q.empty()) { s=s0=q.top().value; int Pre=q.top().pre; q.pop(); //取出当前节点,并从中删除 dx=s.find('0')/3; dy=s.find('0')%3; if(dy-1>=0) //向左 { swap(s[dx*3+dy],s[dx*3+dy-1]);//向左交换 if(V.find(s)==V.end()) { if(isOver(s)) return s; temp.priority=Wcount(s)+Pre; temp.value=s; temp.pre=Pre+1; q.push(temp);//当前节点加入队列 V.insert(s);//加入已搜索的队列 OutPut(s);cout<<"~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~"<<endl; } } s=s0; if(dy+1<=2) //向右 { swap(s[dx*3+dy],s[dx*3+dy+1]);//向左交换 if(V.find(s)==V.end())//当前状态未曾访问过 { if(isOver(s))//到达目的状态 return s; temp.priority=Wcount(s)+Pre; temp.value= s;
Figure 2-2 九宫格
本题采用的估价函数为: f (n)=g (n)+h (n) 其中:h(n)用来计算对应于节点 n 的数据库中错放的棋子曼哈顿距离之和;g (n)为从起点到 n 的代价值。因此,第二层的棋局
2 启发式搜索算法解决八数码问题
2.1 暴力搜索
为了和启发式搜索算法对比实验数据我们先用暴力搜索解决八数码问题
1.1 启发式搜索介绍 为减小搜索范围而需要利用某些已知的、有关具体问题领域的特性信息。此种信息叫做启发信息。利 用启发信息的搜索方法叫做启发式搜索方法。 特点:重排 OPEN 表,选择最有希望的节点加以扩展 种类:最佳优先搜索、A*算法等 启发式搜索策略:有关具体问题领域的信息常常可以用来简化搜索。一个比较灵活(但代价也较大)的 利用启发信息的方法是应用某些准则来重新排列每一步 OPEN 表中所有节点的顺序。然后,搜索就可能沿着 某个被认为是最有希望的边缘区段向外扩展。应用这种排序过程,需要某些估算节点“希望”的量度,这 种量度叫做估价函数(evalution function) 估价函数:为获得某些节点“希望”的启发信息,提供一个评定侯选扩展节点的方法,以便确定哪个 节点最有可能在通向目标的最佳路径,f(n)表示节点 n 的估价函数值。 建立估价函数的一般方法:试图确定一个处在最佳路径上的节点的概率;提出任意节点与目标集之间 的距离量度或差别量度;或者在棋盘式的博弈和难题中根据棋局的某些特点来决定棋局的得分数。这些特 点被认为与向目标节点前进一步的希望程度有关。应用节点“希望”程度(估价函数值)重排 OPEN 表。
0 引言
暴力搜索暴力搜索不用技巧,类似穷举,对于复杂度较高的问题不具有现实意思。而启发式搜索会在 状态空间中的搜索对每一个搜索的位置进行评估,得到最好的位置,再从这个位置进行搜索直到目标。这 样可以省略大量无谓的搜索路径,提高了效率。可以在现实中很好的解决复杂问题,且具有不可比拟的时 间优越性。
1 知识背景
Figure 2-3 A 算法搜索过程 数据结构如下:(所有代码纯手打) struct node { string value; // 用一个字符串储存状态 int priority; // 优先级( = 不在位数 + 扩展深度 ) int pre; // 扩展深度 bool operator <(node a) const { return a.priority<priority; } }; priority_queue<node> q;// 待扩展队列 set<string>V; // 已经搜索过状态 A 搜索代码如下: (所有代码纯手打) string Solve() //宽搜: A 算法 深度+不在位数 {
s=s0;// 因为在上一部先左交换了一下,所以恢复栈顶值 if(dy+1<=2) //向右 { swap(s[dx*3+dy],s[dx*3+dy+1]);//向左交换 if(V.find(s)==V.end())//当前状态未曾访问过 { if(isOver(s))//到达目的状态 return s; q.push(s);//当前节点加入队列 V.insert(s);//加入已搜索的队列 OutPut(s);cout<<"~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~"<<endl; } } s=s0; if(dx-1>=0) //向上 { swap(s[dx*3+dy],s[(dx-1)*3+dy]);//向左交换 if(V.find(s)==V.end())//当前状态未曾访问过 { if(isOver(s))//到达目的状态 return s; q.push(s);//当前节点加入队列 V.insert(s);//加入已搜索的队列 OutPut(s);cout<<"~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~"<<endl; } } s=s0; if(dx+1<=2) //向下 { swap(s[dx*3+dy],s[(dx+1)*3+dy]);//向左交换 if(V.find(s)==V.end())//当前状态未曾访问过 { if(isOver(s))//到达目的状态 return s; q.push(s);//当前节点加入队列 V.insert(s);//加入已搜索的队列 OutPut(s);cout<<"~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~"<<endl; } } } return s; }
2.2 A 算法
f(n) — 节点 n 的估价函数; g(n) — 评价函数,从初始节点 S 到 n 节点的实际代价; h(n) — 启发函数,从 n 到目标节点 Sg 最佳路径的估计代价。
这里 h(n)体现了搜索的启发信息,因为 g(n)是已知的。如果说详细点,g(n)代表了搜索 的宽度优先趋势。但是当 h(n)g(n) 时,可以省略 g(n),而提高效率。 g(n)的计算方法:g(n)就是在搜索树中从 S 到 n 这段路径的代价,这一代价可以由从 n 到 S 寻找指针时,把所遇到的各段弧线的代价加起来给出(这条路径就是到目前为止用搜索算法 找到的从 S 到 n 的最小代价路径)。 h(n)的计算方法:h(n)依赖于有关问题的领域的启发信息。这种信息可能与八数码魔方问题 中的函数 W(n)所用的那种信息相似。把 h(n)叫做启发函数。
启发式搜索算法研究
xxx11010108
(xx 大学 电信学院,浙江 xx 3xx010) 摘 要: 人工智能所要解决的问题大部分是非结构化或结构不良的问题,启发式搜索可以极地提高效率。 本文以八数码问题为例讲解了启发式搜索算法的基本思想。通过和暴力搜索相比我们发现启发式搜索具有 无可比拟的高效性。启发式搜索必然在人工智能领域发挥重要作用。 关键词: 启发式搜索; A*; 最佳优先搜索; 估价函数;
Figure 1-1 算法流程图
1.2 问题引入 八数码问题也称为九宫问题。在 3×3 的棋盘,摆有八个棋子,每个棋子上标有 1 至 8 的某一数字,不 同棋子上标的数字不相同。 棋盘上还有一个空格, 与空格相邻的棋子可以移到空格中。 要求解决的问题是: 给出一个初始状态和一个目标状态,找出一种从初始转变成目标状态的移动棋子的移动步骤。