两轮自平衡小车毕业设计毕业论文
1万8字 基于STM32单片机的两轮平衡车设计

论文题目:基于STM32单片机的两轮平衡车设计摘要本文主要讲述了如何使用微控制器STM32F103C8T6实现控制两个直流步进电机使平衡车能够达到平衡状态且可用手机蓝牙遥控。
本文首先对毕业设计进行方案的论证和选择。
本设计选择了ST公司的STM32F1系列单片机作主控MCU,采用编码直流无刷步进电机,TB6612FNG芯片作步进电机驱动,姿态传感器MPU6050作陀螺仪,0.96寸OLED液晶屏作显示屏,蓝牙模块作为特殊的通信串口与手机APP进行通信,锂电池电源在直流稳压后提供各个模块的所需的工作电压,使平衡车能够直立平衡。
然后本文介绍了STM32和系统的硬件电路设计方案,对直流稳压电路、姿态传感器、步进电机、OLED屏显示电路、驱动电路设计进行分析介绍,对STM32系统的设计流程、卡尔曼滤波算法及PID算法(步进电机控制算法)的原理和实现进行详细的说明,进行上位机程序的调试和工作的逻辑进行讲解。
最后本文讲述了毕业设计的机械安装与整机性能测试部分。
本设计在机械安装全部完成后,对上位机和通电后实际情况进行性能测试,通过观察数据和现象来判断平衡车系统的性能效果,在不同状态和场合下测试平衡车的抗干扰以及运动能力。
关键词:STM32,平衡,步进电机,互补滤波,PIDAbstractThis paper mainly describes how to use the microcontroller STM32F103C8T6 to realize the control of two dc stepper motors so that the balance car can reach the balance state and the bluetooth remote control of mobile phones.This article first carries on the demonstration and the choice to the graduation project project. This design chose the ST's STM32F1 series single chip microcomputer as main control MCU, using encoding brushless dc stepper motor, TB6612FNG chip for step motor drive, position sensors MPU6050 gyroscope, 0.96 inch OLED display LCD screen, bluetooth module as a special communication serial communication with the phone APP, lithium battery power after the dc voltage to provide various modules of the working voltage, you need to make balance of the car can upright balance.Then this paper introduces the STM32 and system design of hardware circuit, the dc voltage circuit, posture sensor, stepper motor, OLED display circuit, drive circuit design analysis is introduced, design process of the STM32 system, kalman filtering algorithm and PID algorithm (stepper motor control algorithm) of detail, the principle and implement of PC logic of the program debugging and work.Finally, this paper describes the graduation design of mechanical installation and machine performance testing part. After the mechanical installation is completed, the design tests the performance of the upper computer and the actual situation after electrification, judges the performance effect of the balance car system by observing data and phenomena, and tests the anti-interference and movement ability of the balance car in different states and occasions.Key words:STM32, Balance, Stepper motor, Complementary filter, PI目录摘要 (Ⅰ)Abstract (Ⅱ)第一章绪论 (1)1.1平衡技术的发展 (1)1.2 设计意义和应用背景 (1)1.2.1设计意义 (1)1.2.2 应用背景 (2)1.3主要工作及结构安排 (2)第二章系统方案设计 (3)2.1平衡原理 (3)2.2平衡小车的性能要求 (4)2.3系统总体设计框图 (4)2.4系统方案论证及选型 (5)2.4.1主控芯片MCU的选型 (5)2.4.2直流步进电机的选型 (5)2.4.3电机驱动的选型 (5)2.4.4解姿态算法的选型 (6)2.5本章小结 (6)第三章系统硬件设计 (7)3.1 STM32C8T6的核心板 (7)3.1.1 STM32最小系统 (8)3.1.2启动模式BOOT[1:0] (9)3.1.3 USB转TTL电路 (9)3.1.4 SWD接口 (11)3.2直流稳压电路 ....................................................................................... 错误!未定义书签。
两轮自平衡小车的电动减速轮设计
学号:24101901695南湖学院毕业论文(设计)题目:两轮自平衡小车的电动减速轮设计作者lxxxx 届别xxx 系别xxxx 专业xxx 指导老师xxxx 职称xxx 完成时间xxxxx摘要两轮自平衡机器人与两轮自平衡电动车都属于两轮自平衡系统的范畴。
两轮自平衡小车是一种可靠、便捷、环保的短途运输交通工具,它占地面积小,通过路面的能力强,并且非常灵活,适用于场馆、机场等地。
近年来国内外对两轮自平衡机器人的控制研究较多,但针对其机械结构的研究却较少,尤其是对两轮自平衡电动车的研究更是少之又少。
本文总结了国内外相关领域的研究成果,对两轮自平衡电动车的减速轮进行了机械设计,选择了各零部件合适的材料,绘制了减速轮的零件图和装配图,并对轴承进行了强度校核。
关键词:两轮自平衡;减速轮;机械设计;Pro/EAbstractBoth the two-wheeled self-balancing electric vehicle and the two-wheeled self-balancing robot belong to the two-wheeled self-balancing system .Since the two-wheeled self-balancing electric vehicle is a kind of reliable and convenient, environmental protection and short-distance transportation vehicles, it covers an area of small, it has the ability to through the pavement, and it is very flexible , and it is applicable to the venue, airport, etc. In recent years studies of the two- wheeled self-balancing robot are too numerous to mention,and most of them focus on the control but not the structure. After having summarized the research results of the field,this thesis designed the two- wheeled self-balancing electric vehicle gear wheel’s mechanical design, choose various spare parts suitable materials, draws the part drawing and the assembly drawing about the gear wheel, and the bearing force respectively.Key words: two- wheeled self-balancing;gear wheel;mechanical design;Pro/E目录第一章绪论 (1)1.1 本论文研究背景 (1)1.2 国内外研究现状 (1)1.2.1 国外研究现状 (1)1.2.2 国内研究现状 (5)1.3 两轮自平衡机器人的研究意义 (6)第二章两轮自平衡系统的平衡原理 (7)第三章两轮自平衡电动车结构的分析 (9)3.1 总体方案分析 (9)3.2 确定减速轮的设计方案 (11)3.2.1 一般自行车电动减速轮结构方案设计 (11)3.2.2 自平衡电动车减速轮整体结构设计 (12)第四章电动减速轮的设计 (15)4.1 Pro/E的介绍 (15)4.2 电机的选择 (15)4.3 轮轴的设计 (16)4.3.1 轴的概述 (16)4.3.2 轴的结构设计 (16)4.3.3 轴的具体装配设计 (17)4.4 减速器设计 (18)4.4.1 减速比的确认 (18)4.4.2 各齿轮参数的确认 (19)4.5 惰轮架设计 (21)4.6 车轮(轮壳)设计 (21)4.7 轴承的选择、定位 (23)4.7.1 轴承的介绍 (23)4.7.2 轴承的选择 (23)4.8 车轮装配体 (24)4.9 减速轮轴承的校核 (25)4.9.1 内侧轴承校核 (25)4.9.2 惰轮轴承寿命校核 (26)第五章全文总结 (30)参考文献 (31)致谢 (32)第一章绪论1.1 本论文研究背景自20 世纪 60 年代人类研制出第一台机器人以来,机器人技术就显示出了强大的新生力,在将近 50 年的时间里,机器人技术得到了飞速的发展[1]。
闽南师范大学_平衡小车毕设 - 最终1
闽南师范大学毕业论文(设计)基于STM32单片机的双轮小车近静态动平衡控制统The Design of The Nearly Static Dynamic Balance Two Wheeled Car Control System Based on TheSTM32姓名:陈国文学号:1105000232系别:物理与电子信息工程学院专业:电气工程及其自动化年级:2011级指导教师:李忆2014年12 月28 日摘要本文介绍以STM32F103RCT6单片机为核心的智能自平衡小车技术的研究,本系统分为单片机最小系统,PID自动反馈调节,驱动控制电路。
通过MPU-6050传感器采集到姿态感知信号传给STM32F103RCT6单片机,经单片机PID反馈调节,发出命令控制驱动模块L298N,驱动2台直流电动机进行相应的动作,最终使得小车能够平稳站立。
为了提高平衡效果,本文引入了卡尔曼滤波器,在调试中应注意初始角度的矫正和PID的参数调节。
本设计现能实现小车在正负2度内平衡,时超超过4S,在小车的控制方面还有待改进。
关键词:STM32F103RCT6单片机姿态检测卡尔曼滤波 PID控制电机驱动AbstractIn this paper, we introduce STM32F103RCT6 single-chip microcomputer as the core of intelligent since the balance of the car technology research, this system is divided into single chip microcomputer minimum system, PID automatic feedback adjustment, the drive control circuit. By MPU - 6050 sensor collected posture perception to STM32F103RCT6 MCU signals, the microcontroller PID feedback control, a command control L298N drive module, drive two dc motor for the corresponding action, eventually making the car can stand steadily.In order to improve the effect of equilibrium, this paper introduced the Calman filter, in needing attention in debugging the parameters initial angle correction and PID regulation. This design is to achieve car in the positive and negative balance within 2 degrees, super than 4S, in control of the car has to require improvement.KeyWord: STM32F103RCT6 single-chip microcomputer Posture perception Kalman filter PID controller motor drive目录中英文摘要 (I)1 引言 (1)1.1 选题背景及实际意义 (1)2 整体方案设计 (1)2.1系统整体设计 (1)2.2姿态检测模块选型方案比较 (2)2.3项目设计要求 (2)2.4平衡小车的总体框图 (2)3 各单元模块的硬件设计 (3)3.1 STM32F103RCT6单片机系统 (3)3.2 稳压模块选型 (3)3.3 姿态检测模块 (4)3.3.1加速度计模块 (5)3.3.2陀螺仪模块 (7)3.4 电机驱动模块选型 (7)3.5电机选型 (8)3.6 电路接线表 (9)3.6.1电源接口解析 (9)3.6.2器件I/O口连接表 (9)4 理论分析与计算 (10)4.1 自平衡小车数学模型 (10)4.2 PID控制器设计 (11)4.2.1 PID控制器原理 (11)4.2.2 PID控制器设计 (11)4.3基于卡尔曼滤波的数据融合 (12)4.4 本章小结 (14)5 系统软件设计 (15)5.1软件系统总体结构 (15)5.2单片机初始化软件设计 (15)5.3姿态检测系统调试 (15)5.3.1角度矫正 (15)5.3.2卡尔曼滤波调试 (16)5.3.3控制系统PID参数整定 (18)6 系统测试 (19)6.1 平衡度测试 (19)6.2站立时间测试 (20)7 器件清单 (20)7.1元器件清单 (20)7.2平衡小车实物图 (21)8 总结与展望 (21)8.1 总结 (21)8.2 展望 (22)参考文献 (22)附录 (i)致谢 (vii)1 引言两轮自平衡小车是一种特殊轮式移动机器人,其动力学系统具有多变量、非线性、强耦合、参数不确定等特性。
两轮自平衡小车的设计与实现
www�ele169�com | 5电子科技0 引言2002年,美国发明家狄恩·卡门(Dean Kamen)与他的DEKA 研发公司(DEKA Research and Development Corp.)团队设计发明,并创立了赛格威责任有限公司(Segway LLC),随即推出了Segway HT 两轮直立自平衡电动车,其所具有的高机动性,强适应力,结构简单易上手等特点,鉴于上述优势,两轮自平衡车的应用前景十分广泛,切实将平衡车应用到交通行业当中。
两轮自平衡车运作原理基于一种 “动态稳定”(DynamicStabilization)的方法原理之上,也就是小车自身的稳定调节能力。
内部集成姿态感知模块(Solid-StateGyroscopes)来判断车身所处的姿势状态,通过高性能微处理器计算出对应输出指令后,控制电机转动来达到平衡调节效果。
本文针对该系统的平衡控制问题,结合实际软硬件环境进行仿真输出,实现了小车的自平衡。
1 平衡原理分析运动平衡控制是研究两轮自平衡小车的关键技术之一,将其可拆解为两个方面:姿态平衡控制和运动轨迹控制。
举一个简单的例子:人们通过两个条件可以让木棒在手指尖上保持直立:(1)托着木棒的手掌可以移动;(2)眼睛可以观察到木棒的倾斜角度(姿态)和倾斜趋势(角速度)。
通过指尖随动来消除木棒的倾斜的趋势,从而保持木棒的直立。
这个过程中实际上就是控制中的负反馈机制。
车模平衡控制也是通过负反馈来实现的,与上面保持木棒直立比较则相对简单。
因为车模有两个轮子着地,车体只会在轮子滚动的方向上发生倾斜。
控制轮子转动,抵消在一个维度上。
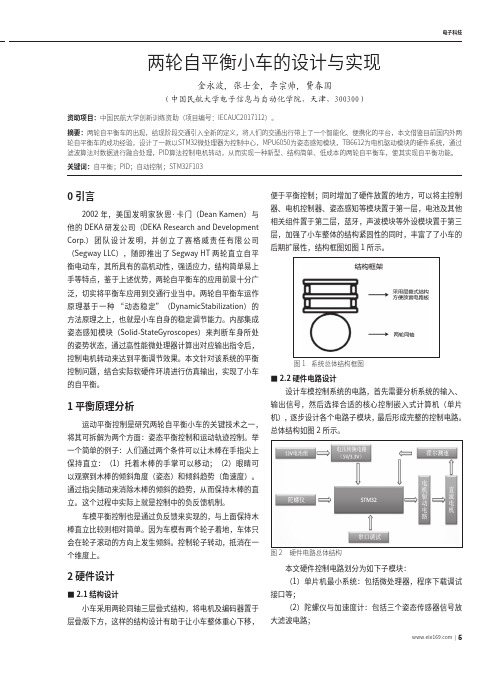
2 硬件设计■2.1 结构设计小车采用两轮同轴三层叠式结构,将电机及编码器置于层叠版下方,这样的结构设计有助于让小车整体重心下移,便于平衡控制;同时增加了硬件放置的地方,可以将主控制器、电机控制器、姿态感知等模块置于第一层,电池及其他相关组件置于第二层,蓝牙,声波模块等外设模块置于第三层,加强了小车整体的结构紧固性的同时,丰富了了小车的后期扩展性,结构框图如图1所示。
浅论小型两轮自平衡电动车系统的设计与研究论文

浅论小型两轮自平衡电动车系统的设计与研究论文浅论小型两轮自平衡电动车系统的设计与研究论文小型两轮自平衡电动车控制方案,是使用姿态检测传感器来检测小车姿态的变化,运用合适的运动控制原理,驱动电机进行相应的调整,以保持小车平衡、但在实际设计中,加速度计检测出来的数据易受小车运动速度影响,陀螺仪检测出来的数据易受温度影响,因此需要采用滤波器对其进行滤波、通过对卡尔曼滤波器与互补滤波器这两种不同的滤波器进行比较,在基于飞思卡尔公司Kinetis K60的小型两轮自平衡电动车姿态稳定系统上加以验证,从而得出在实际设计中卡尔曼滤波器优于互补滤波器。
1控制系统分析与设计1.1系统分析小型两轮自平衡电动车系统主要由姿态传感器,CMOS摄像头传感器、矢量光电编码器,Kinetis K60单片机、直流减速电泪L及其驱动电路组成。
陀螺仪与加速度计的数据经过AD转换后传至控制器中,通过滤波器进行滤波后,获得较为精确的角速度和角加速度数据,从而计算得到角度偏差;摄像头采集道路信息,进行路径识别,使小车沿一定路径J决速运行光电编码器采集车轮速度,通过负反馈控制小车速度,三者数据融合后,再通过PID算法输出控制量,生成PWM从而控制电机运行。
1.2矢量编码器小车进行角度姿态控制时会产生两个自由度上的偏移,除用测量角度的加速度计和陀螺仪外,还需要增加测量两轮车位移的传感器,这里选用可以测量正负位移的欧姆龙500线矢量编码器(A日相光电编码器)。
2角度滤波算法分析从加速度计采集到的角度信息存在高频干扰,输出电压,矢量编码器控制电路会在实际反映倾角的电压值附近波动、要从陀螺仪获得角度信息,需要经过积分运算,而从单片机采集的角速度信息存在误差和温度偏移、这个误差会随时间延长而积累,最终导致输出信号偏离真实角度信号、因此,下面介绍两种滤波法,对两种传感器所获得信息进行校正。
2.1互补滤波器通过加速度计和陀螺仪积分获得的`两种与角度相关的信息,利用加速度计修正陀螺仪的积分输出,利用陀螺仪修正加速度计的高频干扰。
两轮自平衡小车的设计与实现
两轮自平衡小车的设计与实现一、本文概述随着科技的飞速发展,智能化、自主化已经成为现代机器人技术的重要发展方向。
两轮自平衡小车作为一种典型的动态稳定控制机器人,其设计与实现技术对于推动机器人技术的进步具有重要意义。
本文旨在深入探讨两轮自平衡小车的设计理念、实现方法以及关键技术,为相关领域的研究者和爱好者提供有益的参考。
本文将首先介绍两轮自平衡小车的基本概念和原理,阐述其动态稳定控制的基本思想。
随后,将详细介绍两轮自平衡小车的硬件设计,包括电机驱动、传感器选型、控制器设计等关键部分,并阐述各部件之间的协同工作原理。
在此基础上,本文将重点探讨两轮自平衡小车的软件实现,包括平衡控制算法、运动控制算法以及人机交互界面设计等。
本文还将对两轮自平衡小车的性能优化和实际应用进行深入分析,探讨如何提高其稳定性、响应速度以及续航能力等问题。
本文将对两轮自平衡小车的发展趋势和前景进行展望,为相关领域的研究和发展提供有益的参考。
通过本文的阐述,读者可以全面了解两轮自平衡小车的设计与实现过程,掌握其关键技术和应用方法,为推动机器人技术的发展做出贡献。
二、两轮自平衡小车的基本原理两轮自平衡小车,又称作双轮自稳车或双轮倒立摆,是一种基于动态稳定技术设计的个人交通工具。
其基本原理主要涉及到力学、控制理论以及传感器技术。
两轮自平衡小车的稳定性主要依赖于其独特的力学结构。
与传统三轮或四轮的设计不同,双轮自平衡小车只有两个支撑点,这意味着它必须通过动态调整自身姿态来维持稳定。
这种动态调整的过程类似于杂技演员走钢丝,需要精确的平衡和快速的反应。
实现自平衡的关键在于控制理论的应用。
两轮自平衡小车通常搭载有先进的控制系统,该系统通过传感器实时监测小车的姿态(如倾斜角度、加速度等),并根据这些信息计算出必要的调整量。
控制系统随后会向电机发送指令,调整小车的运动状态,以保持平衡。
传感器在两轮自平衡小车中扮演着至关重要的角色。
常见的传感器包括陀螺仪、加速度计和角度传感器等。
【精品毕设】两轮平衡车的设计

毕业设计(论文)
题目两轮平衡车的设计
系(院)机电工程系
专业机械设计制造及其自动化
学号
指导教师
职称
二〇一四年六月二十日
独创声明
本人郑重声明:所呈交的毕业设计(论文),是本人在指导老师的指导下,独立进行研究工作所取得的成果,成果不存在知识产权争议。
据我所知,除文中已经注明引用的内容外,本设计(论文)不含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明。
本声明的法律后果由本人承担。
作者签名:
二〇一二年月日
毕业设计(论文)使用授权声明
本人完全了解滨州学院关于收集、保存、使用毕业设计(论文)的规定。
本人愿意按照学校要求提交学位论文的印刷本和电子版,同意学校保存学位论文的印刷本和电子版,或采用影印、数字化或其它复制手段保存设计(论文);同意学校在不以营利为目的的前提下,建立目录检索与阅览服务系统,公布设计(论文)的部分或全部内容,允许他人依法合理使用。
(保密论文在解密后遵守此规定)
作者签名:
二〇一二年月。
两轮自平衡小车毕业设计
两轮自平衡小车毕业设计04161120(总24页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除两轮自平衡小车的设计摘要最近这几年来,自平衡电动车的研发与商用获得了快速发展。
自平衡车具有体积小,运动十分灵活,便利,节能等特点。
本文提出了一种双轮自平衡小车的设计方案,机械结构采用了双轮双马达驱动;控制主要采用的是反馈调节,为了使车体更好的平衡,使用了PID调节方式;硬件上采用陀螺仪GY521 MPU-6050来采集车体的旋转角度以及旋转角加速度,同时采用了加速度传感器来间接测量车体旋转角度。
采用意法半导体ST 公司的低功耗控制器芯片stm32作为主控,采集上述传感器信息进行滤波,分析等操作后进而控制马达的驱动,从而达到反馈调节的闭环,实现小车的自动平衡。
系统设计,调试完成后,能够实现各个功能部件之间协调工作,在适度的干扰情形下仍然能够保持平衡。
同时,也可以使用手机上的APP通过蓝牙与小车通信控制小车的前进和后退以及转弯。
关键词:自平衡小车陀螺仪传感器滤波 APPDesign of Two-Wheel Self-Balance VehicleAbstractIn the last few years, with the development of commercial self balancing electric vehicle was developed rapidly. Self balancing vehicle has the advantages of small volume, the movement is very flexible, convenient, energy saving etc.. This paper presents a two wheeled self balancing robot design, mechanical structure adopts double motor drive; controlled mainly by the feedback regulation, in order to make the balance of the body better, with the PID regulation; hardware using gyroscope GY521 mpu-6050 to collect the rotation angle of the car body and the rotation angle acceleration. At the same time, acceleration sensor to measure indirectly body rotation angle. St, the low power consumption controller STM32 chip used as the main control, collecting the sensor information filtering, analysis backward and control motor drive, so as to achieve close loop feedback regulation, the realization of the car automatic balance. System design, debugging is completed, the coordination between the various functional components can be achieved, in the case of moderate interference can still maintain a balance. At the same time, you can also use the APP on the mobile phone with the car to control the car's forward and backward and turning.Key Words: Self balancing car gyroscope sensor filter APP目录1.绪论 0研究背景与意义 0自平衡小车的设计要点 0整体构思 0姿态检测系统 0控制算法 (1)本文主要研究目标与内容 (1)论文章节安排............................................... 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
两轮自平衡小车毕业设计毕业论文目录1.绪论 (1)1.1研究背景与意义 (1)1.2两轮自平衡车的关键技术 (2)1.2.1系统设计 (2)1.2.2数学建模 (2)1.2.3姿态检测系统 (2)1.2.4控制算法 (3)1.3本文主要研究目标与容 (3)1.4论文章节安排 (3)2.系统原理分析 (5)2.1控制系统要求分析 (5)2.2平衡控制原理分析 (5)2.3自平衡小车数学模型 (6)2.3.1两轮自平衡小车受力分析 (6)2.3.2自平衡小车运动微分方程 (9)2.4 PID控制器设计 (10)2.4.1 PID控制器原理 (10)2.4.2 PID控制器设计 (11)2.5姿态检测系统 (12)2.5.1陀螺仪 (12)2.5.2加速度计 (13)2.5.3基于卡尔曼滤波的数据融合 (14)2.6本章小结 (16)3.系统硬件电路设计 (17)3.1 MC9SXS128单片机介绍 (17)3.2单片机最小系统设计 (19)3.3 电源管理模块设计 (21)3.4倾角传感器信号调理电路 (22)3.4.1加速度计电路设计 (22)3.4.2陀螺仪放大电路设计 (22)3.5电机驱动电路设计 (23)3.5.1驱动芯片介绍 (24)3.5.2 驱动电路设计 (24)3.6速度检测模块设计 (25)3.6.1编码器介绍 (25)3.6.2 编码器电路设计 (26)3.7辅助调试电路 (27)3.8本章小结 (27)4.系统软件设计 (28)4.1软件系统总体结构 (28)4.2单片机初始化软件设计 (28)4.2.1锁相环初始化 (28)4.2.2模数转换模块(ATD)初始化 (29)4.2.3串行通信模块(SCI)初始化设置 (30)4.2.4测速模块初始化 (31)4.2.5 PWM模块初始化 (32)4.3姿态检测系统软件设计 (33)4.3.1陀螺仪与加速度计输出值转换 (33)4.3.2卡尔曼滤波器的软件实现 (34)4.4平衡PID控制软件实现 (37)4.5两轮自平衡车的运动控制 (38)4.6本章小结 (40)5. 系统调试 (41)5.1系统调试工具 (41)5.2系统硬件电路调试 (41)5.3姿态检测系统调试 (42)5.4控制系统PID参数整定 (45)5.5两轮自平衡小车动态调试 (45)5.6本章小结 (46)6. 总结与展望 (47)6.1 总结 (47)6.2 展望 (47)参考文献 (48)附录 (49)附录一系统电路原理图 (49)附录二系统核心源代码 (50)致谢 (54)1.绪论1.1研究背景与意义近年来,随着电子技术的发展与进步,移动机器人的研究不断深入,成为目前科学研究最活跃的领域之一,移动机器人的应用围越来越广泛,面临的环境和任务也越来越复杂,这就要求移动机器人必须能够适应一些复杂的环境和任务。
比如,户外移动机器人需要在凹凸不平的地面上行走,有时环境中能够允许机器人运行的地方比较狭窄等。
如何解决机器人在这些环境中运行的问题,逐渐成为研究者关心的问题。
两轮自平衡机器人的概念正是在这样一个背景下提出来的,这种机器人区别于其他移动机器人的最显著的特点是:采用了两轮共轴、各自独立驱动的工作方式(这种驱动方式又被称为差分式驱动方式),车身的重心位于车轮轴的上方,通过轮子的前后移动来保持车身的平衡,并且还能够在直立平衡的情况下行驶。
由于特殊的结构,其适应地形变化能力强,运动灵活,可以胜任一些复杂环境里的工作。
两轮自平衡机器人自面世以来,一直受到世界各国机器人爱好者和研究者的关注,这不仅是因为两轮自平衡机器人具有独特的外形和结构,更重要的是因为其自身的本质不稳定性和非线性使它成为很好的验证控制理论和控制方法的平台,具有很高的研究价值。
早在1987年,日本电信大学教授山藤一雄就提出了两轮自平衡机器人的概念。
这个基本的概念就是用数字处理器来侦测平衡的改变,然后以平行的双轮来保持机器的平稳[1][2]。
本世纪初瑞士联邦工业大学的Joe、美国的SegwayN等两轮自平衡机器人相继问世,世界各国越来越多的机器人爱好者和研究者开始关注两轮自平衡机器人。
美国发明家狄恩•卡门与他的DEKA研发公司研发出了可以用于载人的两轮自平衡车命名为赛格威,并已投入市场。
由于两轮自平衡车有着活动灵便,环境无害等优点,其被广泛应用于各类高规格社会活动,目前该车已用于奥运会以及世博会等大型场合。
当今唯一市场化的两轮自平衡电动车,如图1-1所示,在2002年上市以来就备受各界的关注。
卡门观察人类走路的姿势特性,领悟到其实人类之所以可以平稳地直立行走,是因为体灵敏的平衡器官可以精确地判断出身体重心的改变量,透过小脑的即时反应,然后利用腿部的肌肉即时出力来平衡倾倒的态势。
所以当人类的身体前倾时,这种不自主的反应会促使人类伸出其中的一只脚往前走来平衡身体,所以透过这种前倾、往前踏脚、前倾、往前踏脚的动作循环,即构成了“步行”这种动作。
因此卡门尝试使用精密的陀螺仪来代替人类的前庭与耳蜗等平衡器官,以电动马达与车轮代替人类的双脚,发展出所谓的“动态稳定"概念[3]。
图1-1 Segway两轮自平衡车1.2两轮自平衡车的关键技术1.2.1系统设计两轮自平衡车的系统设计包括:车身机械结构设计,硬件系统设计和软件系统设计。
在机械结构上保持小车重心的稳定性,才能减少控制系统由于车身机械结构的不合理性而造成的控制复杂化;硬件系统必须包含自平衡车所需的所有电子系统与电气设备;软件系统则具体负责车身平衡控制。
1.2.2数学建模系统模型的建立,有助于控制器设计,以及控制系统各项参数的确定。
系统数学模型建立的重点在于动力学方面,主要采用拉格朗日动力学方程以及牛顿力学定律的方法。
然而通常的动力学建模方法没有考虑电机转动,车身震动对模型的影响。
并且两轮子平衡车是本质不稳定的非线性系统,因此建模必须考虑线性化问题。
1.2.3姿态检测系统两轮子平衡车通过姿态检测系统来实时检测车身姿态及运动状态,并根据姿态信息对小车进行控制。
因此,对于两轮自平衡车来说,能够精确并稳定的检测当前车身倾角,是实现有效控制的关键所在。
目前有多重技术可以实现倾角检测,但是实时性,经济性还不够理想。
采用MEMS(Micro-Electro-Mechanical System,微机电系统)陀螺仪和加速度计等惯性传感器构成的姿态检测系统可以实时、准确的检测两轮自平衡车的倾角。
但是由于惯性传感器自身固有特性,随着温度,震动等外界变化,会产生不同程度的漂移与噪声,因此必须使用一些滤波算法,对陀螺仪和加速度计采集的数据进行融合,使测量角度更加真实稳定。
1.2.4控制算法两轮自平衡车属于本质不稳定系统,因此其实现的平衡是一种动态平衡。
在遇到外界干扰如何快速恢复,保持自平衡等问题是控制算法需要考虑的问题。
传统的PID控制在各类工业场合有着广泛的应用,完全可以满足两轮自平衡车的控制系统要求。
当然,也可以采用各类先进的控制算法,诸如基于状态空间的LQR(最优控制)、模糊控制、神经网络等[4]。
1.3本文主要研究目标与容本课题设计了一款两轮自平衡小车,研究了车身姿态检测中陀螺仪与加速度传感器的互补特性,并根据其特性比较并设计滤波算法,包括卡尔曼滤波,互补滤波等常用滤波算法。
PID控制算法的实现以及直流电机调速的研究。
具体包括:(1) 机器人本体设计:包括机械,重心调整,电气系统设计等,为进一步研究提供良好的平台;(2) 信号调理及控制部分电路设计:陀螺仪输出信号需要经过进一步滤波放大,因此需要设计信号调理电路,同时控制核心需要构建相关输入输出模块及人际交互设备,因此需要对主控单元电路进行设计。
同时还需要设计直流电机驱动电路。
(3) 基于卡尔曼滤波的数据融合:由于陀螺仪测量的角速度只在短时间稳定而加速度传感器的自身白噪声很严重,因此根据其互补特性设计卡尔曼滤波器以得到准确稳定的角度和角速度。
(4) PID控制算法:包括两路闭环控制。
小车的倾角闭环控制以及直流电机的闭环速度控制。
1.4论文章节安排第一章:绪论,介绍两轮自平衡车的发展历史、研究方向及应用前景,然后阐述课题的研究目标及主要容。
第二章:系统原理阐述与分析,对小车的运动进行建模,分析陀螺仪与加速度计的特性并对滤波算法进行阐述,介绍PID控制器的设计。
第三章:系统硬件设计,介绍两轮子平衡车硬件系统的组成与设计,主要介绍单片机最小系统、陀螺仪信号放大电路、电机驱动电路等。
第四章:系统软件设计,介绍单片机初始化,滤波算法及控制算法,阐述各模块软件设计方法。
第五章:系统调试,介绍滤波算法的效果与参数调整方法,PID参数整定、电机、编码器等模块的调试效果,对调试结果进行分析。
第六章:总结与展望,总结本设计各模块,并对两轮自平衡小车的优化方向进行了简要阐述。
2. 系统原理分析2.1控制系统要求分析根据系统要求,小车必须要能够在无外界干预下依靠一对平行的车轮保持平衡,并完成前进,后退,左右转弯等动作。
分析系统要求可知,保持小车直立和运动的动力都来自于小车的两只车轮,车轮由两只直流电机驱动。
因此,从控制角度来看,可以将小车作为一个控制对象,控制输入量是两个车轮的转动速度。
整个控制系统可以分为三个子系统:(1)小车平衡控制:以小车倾角为输入量,通过控制两个电机的正反转保持小车衡。
(2)小车速度控制:在保持平衡的基础上,通过调节小车倾角实现对速度的控制,实际上还是演变为对电机的控制实现小车的速度控制。
(3)小车方向控制:通过控制两个电机间的转速不同实现转向。
小车直立和方向控制任务都是直接通过控制车模两个后轮驱动电机完成的,而速度控制则是通过调节小车倾角完成的。
小车不同的倾角会引起车模的加减速,从而达到对小车速度的控制。
三个子系统各自独立进行控制。
由于最终都是对同一个控制对象(小车的电机)进行控制,所以各个子系统之间存在着耦合。
为了方便分析,在分析其中之一时,假设其它控制对象都已经达到稳定。
比如在速度控制时,需要小车已经能够保持直立控制;在方向控制时,需要小车能够保持平衡和速度恒定;同样,在小车平衡控制时,也需要速度和方向控制已经达到平稳。
这三个任务中保持小车平衡是关键。
由于小车同时受到三种控制的影响,从小车平衡控制的角度来看,其它两个控制就成为干扰。
因此对小车速度、方向的控制应该尽量保持平滑,以减少对平衡控制的干扰。
以速度调节为例,需要通过改变车模平衡控制中小车倾角设定值,从而改变车模实际倾斜角度,达到速度控制的要求。
为了避免影响车模平衡控制,这个车模倾角的改变需要非常缓慢的进行。
其中平衡控制是系统的最基本要求,也是整个控制系统的难点。
2.2平衡控制原理分析控制小车平衡的直观经验来自人类日常生活经验。