电磁感应,杆,双杆模型(教师版)
高考物理复习 电磁感应杆模型
5.最大速度vm 电容器充电量: Q0 CE
放电结束时电量: Q CU CBlvm
电容器放电电量: Q Q0 Q CE CBlvm
对杆应用动量定理:mvm BIl t BlQ
vm
m
BlCE B2l2C
题型五 电容放电式:
6.达最大速度过程中 的两个关系
v1=0时:电流最大,
Im
Blv0 R1 R2
v2=v1时:电流 I=0
3.两棒的运动情况
安培力大小:
两棒的相对速度变小,感应电 流变小,安培力变小.棒1做加 速度变小的加速运动,棒2做
加速度变小的减速运动,最 终两棒具有共同速度。
随着棒2的减速、棒1的加速,两棒 的相对速度v2-v1变小,回路中电流 也变小。
4.变化
(1)两棒都受外力作用
(2)外力提供方式变化
题型五 电容放电式:
4.最终特征:匀速运 动,但此时电容器带 电量不为零
1.电路特点 电容器放电,相当于电源;导体棒受安 培力而运动。
2.电流的特点 电容器放电时,导体棒在安培力作用下
开始运动,同时产生阻碍放电的反电动
势,导致电流减小,直至电流为零,此 时UC=Blv 3.运动特点 a渐小的加速运动,最终做匀速运动。
1.电路特点:导体棒相当于电源。
6、三个规律
2.安培力的特点:安培力为阻力, 并随速度减小而减小。
(1)能量关系:
1 2
mv02
0
Q,
QR Qr
F BIL B2l2v Rr
(2)动量关系:BIl t 0 mv0 q n Bl s
R r
高中物理-电磁感应中的“双杆模型”

高中物理-电磁感应中的“双杆模型”“双杆”模型分为两类:一类是“一动一静”,甲杆静止不动,乙杆运动,其实质是单杆问题,不过要注意问题包含着一个条件:甲杆静止、受力平衡.另一种情况是两杆都在运动,对于这种情况,要注意两杆切割磁感线产生的感应电动势是相加还是相减.一、平行导轨:不受其他外力作用光滑平行导轨光滑不等距导轨示意图质量m1=m2 电阻r1=r2 长度L1=L2质量m1=m2电阻r1=r2长度L1=2L2规律分析杆MN做变减速运动,杆PQ做变加速运动,稳定时,两杆的加速度均为零,以相等的速度匀速运动稳定时,两杆的加速度均为零,两杆的速度之比为1∶2(2015·高考四川卷)如图所示,金属导轨MNC和PQD,MN与PQ平行且间距为L,所在平面与水平面夹角为α,N、Q连线与MN垂直,M、P间接有阻值为R的电阻;光滑直导轨NC和QD在同一水平面内,与NQ的夹角都为锐角θ.均匀金属棒ab和ef质量均为m,长均为L,ab棒初始位置在水平导轨上与NQ重合;ef 棒垂直放在倾斜导轨上,与导轨间的动摩擦因数为μ(μ较小),由导轨上的小立柱1和2阻挡而静止.空间有方向竖直的匀强磁场(图中未画出).两金属棒与导轨保持良好接触,不计所有导轨和ab棒的电阻,ef棒的阻值为R,最大静摩擦力与滑动摩擦力大小相等,忽略感应电流产生的磁场,重力加速度为g.(1)若磁感应强度大小为B,给ab棒一个垂直于NQ、水平向右的速度v1,在水平导轨上沿运动方向滑行一段距离后停止,ef棒始终静止,求此过程ef棒上产生的热量;(2)在(1)问过程中,ab棒滑行距离为d,求通过ab棒某横截面的电量;(3)若ab棒以垂直于NQ的速度v2在水平导轨上向右匀速运动,并在NQ位置时取走小立柱1和2,且运动过程中ef棒始终静止.求此状态下最强磁场的磁感应强度及此磁场下ab棒运动的最大距离.[解析](1)设ab棒的初动能为E k,ef棒和电阻R在此过程产生的热量分别为W和W1,有W+W1=E k①且W=W1②由题意有E k=12m v21③得W=14m v21.④(2)设在题设过程中,ab棒滑行时间为Δt,扫过的导轨间的面积为ΔS,通过ΔS的磁通量为ΔΦ,ab棒产生的电动势平均值为E,ab棒中的电流为I,通过ab棒某横截面的电荷量为q,则甲E=ΔΦΔt⑤且ΔΦ=BΔS⑥I=qΔt⑦又有I=2ER⑧由图甲所示ΔS=d(L-d cot θ)⑨联立⑤~⑨,解得q=2Bd(L-d cot θ)R.⑩(3)ab棒滑行距离为x时,ab棒在导轨间的棒长L x为L x=L-2x cot θ⑪此时,ab棒产生的电动势E x为E x=B v2L x⑫流过ef棒的电流I x为I x=E xR⑬ef棒所受安培力F x为F x=BI x L⑭联立⑪~⑭,解得F x=B2v2LR(L-2x cot θ)⑮由⑮式可得,F x在x=0和B为最大值B m时有最大值F1.由题知,ab棒所受安培力方向必水平向左,ef棒所受安培力方向必水平向右,使F1为最大值的受力分析如图乙所示,图中f m为最大静摩擦力,有F1cos α=mg sin α+μ(mg cos α+F1sin α)⑯联立⑮⑯,得B m=1Lmg(sin α+μcos α)R(cos α-μsin α)v2⑰⑰式就是题目所求最强磁场的磁感应强度大小,该磁场方向可竖直向上,也可竖直向下.乙丙由⑮式可知,B为B m时,F x随x增大而减小,x为最大x m时,F x为最小值F2,如图丙可知F2cos α+μ(mg cos α+F2sin α)=mg sin α⑱联立⑮⑰⑱,得x m =μL tan θ(1+μ2)sin αcos α+μ.[答案]见解析二、平行导轨:一杆受恒定水平外力作用光滑平行导轨不光滑平行导轨示意图质量m1=m2电阻r1=r2长度L1=L2摩擦力F f1=F f2=F f 质量m1=m2电阻r1=r2长度L1=L2规律分析开始时,两杆做变加速运动;稳定时,两杆以相同的加速度做匀变速运动开始时,若F f<F≤2F f,则PQ杆先变加速后匀速,MN杆一直静止;若F>2F f,PQ杆先变加速,MN后做变加速最后两杆做匀速运动如图所示,两条平行的金属导轨相距L=1 m,水平部分处在竖直向下的匀强磁场B1中,倾斜部分与水平方向的夹角为37°,处于垂直于斜面的匀强磁场B1中,B1=B2=0.5 T.金属棒MN和PQ的质量均为m=0.2 kg,电阻R MN=0.5 Ω、R PQ=1.5 Ω.MN置于水平导轨上,PQ置于倾斜导轨上,刚好不下滑.两根金属棒均与导轨垂直且接触良好.从t=0时刻起,MN棒在水平外力F的作用下由静止开始向右运动,MN棒的速度v与位移x满足关系v=0.4x.不计导轨的电阻,MN始终在水平导轨上运动,MN与水平导轨间的动摩擦因数μ=0.5.(1)问当MN棒运动的位移为多少时PQ刚要滑动?(2)求从t=0到PQ刚要滑动的过程中通过PQ棒的电荷量;(3)定性画出MN受的安培力随位移变化的图象,并求出MN从开始到位移x1=5 m的过程中外力F做的功.[解析](1)开始PQ刚好不下滑时,PQ受沿倾斜导轨向上的最大静摩擦力F fm,则F fm=mg sin 37°设PQ刚好要向上滑动时,MN棒的感应电动势为E,由法拉第电磁感应定律E=B1L v设电路中的感应电流为I,由闭合电路的欧姆定律得I=ER MN+R PQ设PQ所受安培力为F A,有F A=B2IL此时PQ受沿倾斜导轨向下的最大静摩擦力,由力的平衡条件有:F A=F fm+mg sin 37°又由v=0.4x,联立解得x=48 m.(2)在从t=0到PQ刚要滑动的过程中,穿过回路MNQP的磁通量的变化量ΔΦ=B1Lx=0.5×1×48 Wb=24 Wb通过PQ棒的电荷量q=I·t=ER MN+R PQ·t=ΔΦR MN+R PQ=240.5+1.5C=12 C.(3)回路中的电流I=B1L vR MN+R PQ,MN受到的安培力F A=B1IL,又v=0.4x,故推出F A=0.4xB21L2R MN+R PQ因此MN受的安培力与位移x成正比,故画出如图所示的安培力—位移图象.考虑到MN受的安培力与位移方向相反,故安培力与位移图象包围的面积等于克服安培力做的功,故安培力对MN做功W A=-12·0.4x1B21L2R MN+R PQx1=-0.625 J当x1=5 m时,速度v1=0.4x1=0.4×5 m/s=2 m/s对MN棒由动能定理:W F-μmgx1+W A=12m v21-0故W F=12m v21+μmgx1-W A=⎝⎛⎭⎫12×0.2×22+0.5×0.2×10×5+0.625J=6.025 J.[答案](1)48 m(2)12 C(3)6.025 J三、倾斜导轨:两杆不受外力作用注意双杆之间的制约关系,即“主动杆”与“被动杆”之间的关系,因为两杆都有可能产生感应电动势,相当于两个电源,并且最终两杆的收尾状态的确定是分析问题的关键.(2014·高考天津卷)如图所示,两根足够长的平行金属导轨固定在倾角θ=30°的斜面上,导轨电阻不计,间距L =0.4 m .导轨所在空间被分成区域Ⅰ和Ⅱ,两区域的边界与斜面的交线为MN ,Ⅰ中的匀强磁场方向垂直斜面向下,Ⅱ中的匀强磁场方向垂直斜面向上,两磁场的磁感应强度大小均为B =0.5 T .在区域Ⅰ中,将质量m 1=0.1 kg ,电阻R 1=0.1 Ω的金属条ab 放在导轨上,ab 刚好不下滑.然后,在区域Ⅱ中将质量m 2=0.4 kg ,电阻R 2=0.1 Ω的光滑导体棒cd 置于导轨上,由静止开始下滑.cd 在滑动过程中始终处于区域Ⅱ的磁场中,ab 、cd 始终与导轨垂直且两端与导轨保持良好接触,取g =10 m/s 2.问:(1)cd 下滑的过程中,ab 中的电流方向;(2)ab 刚要向上滑动时,cd 的速度v 多大;(3)从cd 开始下滑到ab 刚要向上滑动的过程中,cd 滑动的距离x =3.8 m ,此过程中ab 上产生的热量Q 是多少.[审题点睛] (1)ab 刚好不下滑,隐含F fm =mg sin θ,方向沿斜面向上,ab 刚要向上滑动时,隐含F 安=F fm +mg sin θ,摩擦力方向沿斜面向下.(2)由于ab 中的电流变化,产生的热量要用功能关系(能量守恒)结合电路知识求解.[解析] (1)由右手定则可判断出cd 中的电流方向为由d 到c ,则ab 中电流方向为由a 流向b . (2)开始放置ab 刚好不下滑时,ab 所受摩擦力为最大静摩擦力,设其为F max ,有F max =m 1g sin θ① 设ab 刚要上滑时,cd 棒的感应电动势为E ,由法拉第电磁感应定律有E =BL v ② 设电路中的感应电流为I ,由闭合电路欧姆定律有 I =ER 1+R 2③ 设ab 所受安培力为F 安,有F 安=BIL ④此时ab 受到的最大静摩擦力方向沿斜面向下,由平衡条件有F 安=m 1g sin θ+F max ⑤ 综合①②③④⑤式,代入数据解得v =5 m/s.(3)设cd 棒运动过程中在电路中产生的总热量为Q 总,由能量守恒定律有m 2gx sin θ=Q 总+12m 2v 2又Q =R 1R 1+R 2Q 总解得Q =1.3 J.[答案] (1)由a 流向b (2)5 m/s (3)1.3 J 四、倾斜导轨:一杆受到外力作用(2016·浙江金华高三质检)如图所示,两根足够长的光滑平行金属导轨MN 、PQ 间距为l =0.5 m ,其电阻不计,两导轨及其构成的平面均与水平面成30°角.完全相同的两金属棒ab 、cd 分别垂直导轨放置,每棒两端都与导轨始终有良好接触,已知两棒质量均为m =0.02 kg ,电阻均为R =0.1 Ω,整个装置处在垂直于导轨平面向上的匀强磁场中,磁感应强度B =0.2 T ,棒ab 在平行于导轨向上的力F 作用下,沿导轨向上匀速运动,而棒cd 恰好能够保持静止,取g =10 m/s 2,问:(1)通过棒cd 的电流I 是多少,方向如何? (2)棒ab 受到的力F 多大?(3)棒cd 每产生Q =0.1 J 的热量,力F 做的功W 是多少?[解析] (1)棒cd 受到的安培力F cd =IlB棒cd 在共点力作用下受力平衡,则F cd =mg sin 30° 代入数据解得I =1 A根据楞次定律可知,棒cd 中的电流方向由d 至c . (2)棒ab 与棒cd 受到的安培力大小相等,F ab =F cd 对棒ab ,由受力平衡知F =mg sin 30°+IlB 代入数据解得F =0.2 N.(3)设在时间t 内棒cd 产生Q =0.1 J 的热量,由焦耳定律知Q =I 2Rt设棒ab 匀速运动的速度大小为v ,其产生的感应电动势E =Bl v ,由闭合电路欧姆定律知,I =E2R由运动学公式知在时间t 内,棒ab 沿导轨的位移 x =v t力F 做的功W =Fx综合上述各式,代入数据解得W =0.4 J. [答案] (1)1 A 方向由d 至c (2)0.2 N (3)0.4 J 五、竖直导轨如图是一种电磁驱动电梯的原理图,竖直平面上有两根很长的平行竖直轨道,轨道间有垂直轨道平面的匀强磁场B 1和B 2,B 1=B 2=1 T ,且B 1和B 2的方向相反,两磁场始终竖直向上做匀速运动.电梯桥厢(未在图中画出)固定在一个用超导材料制成的金属框abdc 内,并且与之绝缘.电梯载人时的总质量为5×103 kg ,所受阻力f =500 N ,金属框垂直轨道的边长L cd =2m ,两磁场沿轨道的宽度均与金属框的竖直边长L ac 相同,金属框整个回路的电阻R =9.5×10-4Ω,若设计要求电梯以v 1=10 m/s 的速度向上匀速运动,取g =10 m/s 2,那么 (1)磁场向上运动速度v 0应该为多大?(2)在电梯向上做匀速运动时,为维持它的运动,外界对系统提供的总功率为多少?(保留三位有效数字)[解析] (1)当电梯向上做匀速运动时,安培力等于重力和阻力之和,所以 F A =mg +f =50 500 N金属框中感应电流大小为 I =2B 1L cd (v 0-v 1)R金属框所受安培力F A =2B 1IL cd 解得v 0=13 m/s.(2)当电梯向上做匀速运动时,由第(1)问中的I =2B 1L cd (v 0-v 1)R ,求出金属框中感应电流I =1.263×104 A金属框中的焦耳热功率P 1=I 2R =1.51×105 W 有用功率为克服电梯重力的功率 P 2=mg v 1=5×105 W阻力的功率为P 3=f v 1=5×103W电梯向上运动时,外界提供的能量,一部分转变为金属框内的焦耳热,另一部分克服电梯的重力和阻力做功.因而外界对系统提供的总功率P 总=P 1+P 2+P 3=6.56×105W. [答案] (1)13 m/s (2)6.56×105 W1.(多选)如图所示,两足够长平行金属导轨固定在水平面上,匀强磁场方向垂直导轨平面向下,金属棒ab 、cd 与导轨构成闭合回路且都可沿导轨无摩擦滑动,两金属棒ab 、cd 的质量之比为2∶1.用一沿导轨方向的恒力F 水平向右拉金属棒cd ,经过足够长时间以后( )A .金属棒ab 、cd 都做匀速运动B .金属棒ab 上的电流方向是由b 向aC .金属棒cd 所受安培力的大小等于2F /3D .两金属棒间距离保持不变解析:选BC.对两金属棒ab 、cd 进行受力分析和运动分析可知,两金属棒最终将做加速度相同的匀加速直线运动,且金属棒ab 速度小于金属棒cd 速度,所以两金属棒间距离是变大的,由楞次定律判断金属棒ab 上的电流方向由b 到a ,A 、D 错误,B 正确;以两金属棒整体为研究对象有:F =3ma ,隔离金属棒cd 分析其受力,则有:F -F 安=ma ,可求得金属棒cd 所受安培力的大小F 安=23F ,C 正确.2.(多选)(2016·唐山模拟)如图所示,水平传送带带动两金属杆a 、b 匀速向右运动,传送带右侧与两光滑平行金属导轨平滑连接,导轨与水平面间夹角为30°,两虚线EF 、GH 之间有垂直导轨平面向下的匀强磁场,磁感应强度为B ,磁场宽度为L ,两金属杆的长度和两导轨的间距均为d ,两金属杆质量均为m ,两杆与导轨接触良好.当金属杆a 进入磁场后恰好做匀速直线运动,当金属杆a 离开磁场时,金属杆b 恰好进入磁场,则( )A .金属杆b 进入磁场后做加速运动B .金属杆b 进入磁场后做匀速运动C .两杆在穿过磁场的过程中,回路中产生的总热量为mgLD .两杆在穿过磁场的过程中,回路中产生的总热量为mgL2解析:选BC.两杆从导轨顶端进入磁场过程中,均只有重力做功,故进入磁场时速度大小相等,金属杆a 进入磁场后匀速运动,b 进入磁场后,a 离开磁场,金属杆b 受力与金属杆a 受力情况相同,故也做匀速运动,A 项错,B 项正确;两杆匀速穿过磁场,减少的重力势能转化为回路的电热,即Q =2mgL sin 30°=mgL ,C 项正确,D 项错.3.(多选)如图所示,光滑平行的金属导轨宽度为L ,与水平方向成θ角倾斜固定,导轨之间充满了垂直于导轨平面的足够大的匀强磁场,磁感应强度为B ,在导轨上垂直导轨放置着质量均为m 、电阻均为R 的金属棒a 、b ,二者都被垂直于导轨的挡板挡住保持静止,金属导轨电阻不计,现对b 棒施加一垂直于棒且平行于导轨平面向上的牵引力F ,并在极短的时间内将牵引力的功率从零调为恒定的功率P .为了使a 棒沿导轨向上运动,P 的取值可能为(重力加速度为g )( )A.2m 2g 2RB 2L 2·sin 2θB .3m 2g 2RB 2L 2·sin 2θC.7m 2g 2RB 2L2·sin 2θ D .5m 2g 2RB 2L2·sin 2θ解析:选CD.以b 棒为研究对象,由牛顿第二定律可知F -mg sin θ-BL v2R BL =ma ,以a 棒为研究对象,由牛顿第二定律可知BL v 2R BL -mg sin θ=ma ′,则F >2mg sin θ,v >2Rmg sin θB 2L 2,故P =F v >4m 2g 2R B 2L 2sin 2θ,由此可得选项C 、D 正确,选项A 、B 错误.4.如图所示,竖直平面内有平行放置的光滑导轨,导轨间距为l =0.2 m ,电阻不计,导轨间有水平方向的匀强磁场,磁感应强度大小为B =2 T ,方向如图所示,有两根质量均为m =0.1 kg ,长度均为l =0.2 m ,电阻均为R =0.4 Ω的导体棒ab 和cd 与导轨接触良好,当用竖直向上的力F 使ab 棒向上做匀速运动时,cd 棒刚好能静止不动,则下列说法正确的是(g 取10m/s 2)( )A .ab 棒运动的速度是5 m/sB .力F 的大小为1 NC .在1 s 内,力F 做的功为5 JD .在1 s 内,cd 棒产生的电热为5 J解析:选A.对导体棒cd 由B Bl v2R l =mg ,得到v =5 m/s ,选项A 正确;再由F =mg +F 安=2 N 知选项B 错误;在1 s 内,力F 做的功W =F v t =10 J ,选项C 错误;在1 s 内,cd 棒产生的电热Q =⎝⎛⎭⎫Bl v2R 2Rt =2.5 J ,选项D 错误.5.(2016·合肥一中高三检测)如图所示,间距l =0.3 m 的平行金属导轨a 1b 1c 1和a 2b 2c 2分别固定在两个竖直面内.在水平面a 1b 1b 2a 2区域内和倾角θ=37°的斜面c 1b 1b 2c 2区域内分别有磁感应强度B 1=0.4 T 、方向竖直向上和B 2=1 T 、方向垂直于斜面向上的匀强磁场.电阻R =0.3 Ω、质量m 1=0.1 kg 、长为l 的相同导体杆K 、S 、Q 分别放置在导轨上,S 杆的两端固定在b 1、b 2点,K 、Q 杆可沿导轨无摩擦滑动且始终接触良好.一端系于K 杆中点的轻绳平行于导轨绕过轻质定滑轮自然下垂,绳上穿有质量m 2=0.05 kg 的小环.已知小环以a =6 m/s 2的加速度沿绳下滑.K 杆保持静止,Q 杆在垂直于杆且沿斜面向下的拉力F 作用下匀速运动.不计导轨电阻和滑轮摩擦,绳不可伸长.取g =10 m/s 2,sin 37°=0.6,cos 37°=0.8.求:(1)小环所受摩擦力的大小; (2)Q 杆所受拉力的瞬时功率.解析:(1)设小环受到的摩擦力大小为F f ,由牛顿第二定律,有m 2g -F f =m 2a 代入数据,得F f =0.2 N.(2)设通过K 杆的电流为I 1,K 杆受力平衡, 有F f =B 1I 1l设回路总电流为I ,总电阻为R 总,有I =2I 1 R 总=32R设Q 杆下滑速度大小为v ,产生的感应电动势为E ,有I =ER 总E =B 2l vF +m 1g sin θ=B 2Il拉力的瞬时功率为P =F v联立以上方程,代入数据得P =2 W. 答案:(1)0.2 N (2)2 W6.如图所示,两根足够长且平行的光滑金属导轨与水平面成53°角固定放置,导轨间连接一阻值为6 Ω的电阻R ,导轨电阻忽略不计.在两平行虚线m 、n 间有一方向垂直于导轨所在平面向下、磁感应强度为B 的匀强磁场.导体棒a 的质量为m a =0.4 kg ,电阻R a =3 Ω;导体棒b 的质量为m b =0.1 kg ,电阻R b =6 Ω.导体棒a 、b 分别垂直导轨放置并始终与导轨接触良好.a 、b从开始相距L 0=0.5 m 处同时由静止释放,运动过程中它们都能匀速穿过磁场区域,当b 刚穿出磁场时,a 正好进入磁场,g 取10 m/s 2,不计a 、b 之间电流的相互作用,sin 53°=0.8,cos 53°=0.6.求:(1)在a 、b 分别穿越磁场的过程中,通过R 的电荷量之比;(2)在穿越磁场的过程中,a 、b 两导体棒匀速运动的速度大小之比; (3)磁场区域沿导轨方向的宽度d ; (4)在整个运动过程中,产生的总焦耳热. 解析:(1)由q 总=I Δt ,I =E R 总,E =ΔΦΔt ,得q 总=ΔΦR 总在b 穿越磁场的过程中,b 是电源,a 与R 是外电路,电路的总电阻R 总1=8 Ω 通过R 的电荷量为q Rb =13q 总1=13·ΔΦR 总1同理,a 在磁场中匀速运动时,R 总2=6 Ω,通过R 的电荷量为q Ra =12q 总2=12·ΔΦR 总2,可得q Ra ∶q Rb =2∶1.(2)设a 、b 穿越磁场的过程中的速度分别为v a 和v b ,则b 中的电流I b =BL v bR 总1由平衡条件得B 2L 2v bR 总1=m b g sin 53°同理,a 在磁场中匀速运动时有 B 2L 2v aR 总2=m a g sin 53°, 解得v a ∶v b =3∶1.(3)设b 在磁场中穿越的时间为t ,由题意得: v a =v b +gt sin 53°,d =v b t因为v 2a -v 2b =2gL 0sin 53°,v a ∶v b =3∶1所以d =0.25 m.(4)a 穿越磁场时所受安培力F 安=m a g sin 53° 克服安培力所做的功W a =m a gd sin 53°=0.8 J 同理,b 穿越磁场时克服安培力所做的功 W b =m b gd sin 53°=0.2 J由功能关系得,在整个过程中,电路中产生的总焦耳热Q =W a +W b =1 J. 答案:(1)2∶1 (2)3∶1 (3)0.25 m (4)1 J。
电磁感应双杆模型总结归类

同学们,咱们今天来聊聊电磁感应双杆模型。
先来说说平行等距型双杆。
就像两辆并排跑的车,速度可能不一样,但它们受到的磁场力会影响它们的运动。
比如说,两根平行的金属杆放在磁场里,给其中一根杆一个初速度,另一根杆就会在磁场力的作用下也动起来。
再讲讲平行不等距型双杆。
这就好比两个腿不一样长的人跑步,受到的影响也不同。
不等距的双杆在磁场中,电流大小可能不一样,运动情况也就更复杂啦。
还有垂直型双杆。
想象一下两根杆交叉摆放,像个十字,磁场一作用,它们的运动就相互关联起来。
比如说,在一个实际的物理实验中,我们通过改变磁场强度、杆的长度和电阻等因素,就能观察到双杆运动的不同变化。
同学们,只要多做实验,多思考,这个电磁感应双杆模型就不难理解啦!嘿,各位物理爱好者!今天咱们好好唠唠电磁感应双杆模型。
你看啊,有一种情况是双杆都有动力在跑。
就好比两个人比赛跑步,都拼命往前冲。
比如说,给两根杆都加上电源,它们在磁场里就会“奋勇向前”。
还有一种是一根杆主动,另一根被动。
这就像一个人拉着另一个人跑,主动的那个出力,被动的跟着动。
比如说,给一根杆初速度,另一根就被带着跑起来。
另外,双杆还可能受到不同方向的力。
这就像两个人在迷宫里,一个想往左,一个想往右,结果就很有趣啦。
给大家举个例子,在一个电磁感应装置中,通过调整双杆的位置和磁场方向,就能看到各种奇妙的运动现象。
怎么样,是不是觉得很有意思?亲爱的家长们,今天和您讲讲电磁感应双杆模型。
您就想象一下,有两根金属棒在一个有磁力的地方。
比如说,就像两根铅笔在一个有吸力的盒子里。
有一种情况是两根棒一起动,就好像两个人一起拉着一辆车。
这时候它们的运动速度、方向都会相互影响。
还有的时候,只有一根棒先动,另一根被带着动,就像大孩子带着小孩子跑。
比如说,您可以想象家里的两个孩子一起玩滑梯,一个先滑下去,另一个跟着。
这和双杆在磁场里的运动有点像呢。
了解了这些,您就能更好地理解孩子学习物理的难处啦。
老师们,咱们一起来看看电磁感应双杆模型。
人教版高三复习专题:双杆模型综合动量(有答案解析)
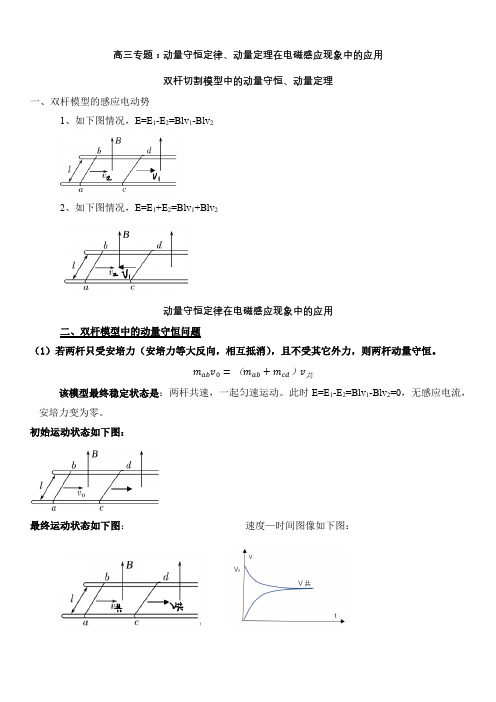
v高三专题:动量守恒定律、动量定理在电磁感应现象中的应用双杆切割模型中的动量守恒、动量定理一、双杆模型的感应电动势1、如下图情况,E=E1-E2=Blv1-Blv22、如下图情况,E=E1+E2=Blv1+Blv2动量守恒定律在电磁感应现象中的应用二、双杆模型中的动量守恒问题(1)若两杆只受安培力(安培力等大反向,相互抵消),且不受其它外力,则两杆动量守恒。
m ab v0=(m ab+m cd)v共该模型最终稳定状态是:两杆共速,一起匀速运动。
此时E=E1-E2=Blv1-Blv2=0,无感应电流,安培力变为零。
初始运动状态如下图:最终运动状态如下图:速度—时间图像如下图:注意:有例外情况(如下图),两杆只受安培力,但安培力大小不等,不能相互抵消。
此时动量也不守恒。
(2)若两杆除了安培力,还有其它外力,如拉力,则两杆不满足动量守恒的条件。
初始运动状态如下图:导轨光滑,只有一个恒定的拉力F作用在导体棒ab上,对ab导体棒,a1=F−F安m1,F安从0 开始增加,a1不断减小,ab导体棒做加速度不断减小的加速运动。
对ad导体棒,a2=F安m2,F安从0 开始增加,a2从零开始不断增大,cd导体棒做加速度不断增大的加速运动。
由于v ab>v cd,E=E1-E2=Blv ab-Blv cd,当a1=a2,两杆速度差恒等,△v=v ab−v cd=恒量,E也是恒量,I和F安也是恒量,则a1=a2=恒量,达到稳定状态。
最终稳定状态是:两杆以共同的加速度一起匀加速运动。
两杆可以看作一个整体,可适用整体法。
此时:a ab=a cd=a整体=F(m ab+m cd)动量定理在电磁感应现象中的应用三、单杆或双杆中的动量定理问题1、不管单杆还是双杆模型,都可以单独对某根杆用动量定理。
2、(1)若杆只受安培力,根据动量定理有:Ft=△P=BILt=BLq,q是通过的电荷量(2)若杆还有其它外力,则:F安t+F外t=△P=BILt+F外t=BLq+ F外t考点强化训练:双杆模型的动量问题例1、如图所示,光滑的金属导轨MN、PQ水平放置,导轨近距离为l,磁场竖直向下,磁感应强度为B。
电磁感应中的“杆+导轨”模型
电磁感应中的“杆+导轨”模型电磁感应中的“杆+导轨”模型一、单棒模型阻尼式:在单棒模型中,导体棒相当于电源,根据洛伦兹力的公式,可以得到安培力的特点为阻力,并随速度减小而减小,加速度随速度减小而减小,最终状态为静止。
根据能量关系、动量关系和瞬时加速度,可以得到公式B2l2v R rF和q mv/Bl,其中q表示流过导体棒的电荷量。
需要注意的是,当有摩擦或者磁场方向不沿竖直方向时,模型的变化会受到影响。
举例来说,如果在电阻不计的光滑平行金属导轨固定在水平面上,间距为L、导轨左端连接一阻值为R的电阻,整个导轨平面处于竖直向下的磁感应强度大小为B的匀强磁场中,一质量为m的导体棒垂直于导轨放置,a、b之间的导体棒阻值为2R,零时刻沿导轨方向给导体棒一个初速度v,一段时间后导体棒静止,则零时刻导体棒的加速度为0,零时刻导体棒ab两端的电压为BLv,全过程中流过电阻R的电荷量为mv/Bl,全过程中导体棒上产生的焦耳热为0.二、发电式在发电式中,导体棒同样相当于电源,当速度为v时,电动势E=Blv。
根据安培力的特点,可以得到公式22Blv/l=Blv/(R+r)。
加速度随速度增大而减小,最终特征为匀速运动。
在稳定后的能量转化规律中,F-BIl-μmg=m*a,根据公式可以得到a=-(F-μmg)/m、v=0时,有最大加速度,a=0时,有最大速度。
需要注意的是,当电路中产生的焦耳热为mgh时,电阻R中产生的焦耳热也为mgh。
1.如图所示,相距为L的两条足够长的光滑平行金属导轨MN、PQ与水平面的夹角为θ,N、Q两点间接有阻值为R的电阻。
整个装置处于磁感应强度为B的匀强磁场中,磁场方向垂直导轨平面向下。
将质量为m、阻值也为R的金属杆cd垂直放在导轨上,杆cd由静止释放,下滑距离x时达到最大速度。
重力加速度为g,导轨电阻不计,杆与导轨接触良好。
求:1)杆cd下滑的最大加速度和最大速度;2)上述过程中,杆上产生的热量。
电磁感应应中的双杆模型

双杆金属棒在磁场中滑轨上运动归类例析:一、问题分析这类问题常规的要用到能量观点,求解能的转化,常见的有机械能能间转移,机械能向电能转化,电能向内能即系统内能转化。
常用到一种平衡一一回路中的1=0,而不是两棒的速度相等。
当两导轨平行时,系统动量守恒,稳定态为两棒速度相等;若两导轨不平行,系统(两棒)受合力不为0,动量不守恒,这时稳定态为两棒运动通过的①相同,即1=0( △①=0),两棒的速度比与两棒对应有效长成反比关系,这一点有些学生受思维定势影响,套用结论,从而导致错误•二、问题分类A.两根棒,无其它力:例1.如图所示,光滑水平导轨间距为L,电阻不计,处在竖直方向的匀强磁场中,磁感应强度为B,质量均为m,电阻均为R的导体棒ab和cd静止于导轨上,若给 ab棒一个水平向右的瞬时冲量I,求两导体棒最终的运动速度。
例2.如图所示,固定于同一水平面内的光滑平行金属导轨分为两段且相连,AB段的宽为CD段宽的2倍,BC两侧两段导轨足够长且处在竖直方向的同一匀强磁场B中,两质量均为m的直金属棒a、b分别放在AB、CD段且均与导轨垂直。
现给 a施以作用时间极短的冲击,使其获得大小为V。
的初速度。
求;(1)若a、b距离两端导轨的连接处 BC足够远,则a在AB段上,b在CD段上的最终速度各为多大?(2)从a获得的初速度 V0到a和b达到上述最终速度的过程中,系统中产生的热量是多少?(3)如果a和b分别在AB段和CD段上达到上述最终速度后进入同一段导轨AB或CD 上且永不相碰,则 a和b在AB或CD上的最终速度各为多大?B.两根棒,受其它力:(3) ab 杆和cd 杆的瞬时速度 V ab 与V cd 大小关系怎样?练习:1.杆平行的金属导轨,固定在同一水平面上,磁感强度B = 0.50T 的匀强磁场与导轨所在平 面垂直,导轨的电阻很小,可不计。
导轨间的距离I = 0.20m 。
两根质量均为 m = 0.10kg的平行杆甲、乙可在导轨上无摩擦地滑动,滑动过程中与导轨保持垂直,每根金属杆的电 阻R=0.50 Q, t = 0时刻,两杆都处于静止状态。
高中物理高考物理一轮复习单元综合专题十电磁感应中的“杆_轨”模型课件新人教版201908021252

运动条件
运动情况分析
F=B2LR2v0 合力为零,做匀速运动
F 为恒力
F>B2LR2v0
v↑⇒BLv↑⇒I↑⇒BIL↑⇒a↓⇒ a=0,匀速运动.
F<B2LR2v0
v↓ ⇒ BLv↓ ⇒ I↓ ⇒ BIL↓ ⇒ a↓ ⇒a=0,匀速运动
F 随时间 t 按一定线性规 要使棒做匀加速运动,由牛顿第二
律变化
①作用于 ab 的恒力(F)的功率: P=Fv=0.6×7.5 W=4.5 W ②电阻(R+r)产生焦耳热的功率: P′=I′2(R+r)=1.52×(0.8+0.2) W=2.25 W
③逆时针方向的电流 I′,从电池的正极流入,负极流出,电 池处于“充电”状态,吸收能量,以化学能的形式储存起来.电 池吸收能量的功率:P″=I′E=1.5×1.5 W=2.25 W.
单元综合专题
(十)电磁感应中的“杆—轨”模型
专题综述
电磁感应中的“杆—轨”运动模型,是导体切割磁感线运动 过程中动力学与电磁学知识的综合应用,此类问题是高考命题的 重点,主要类型有:“单杆”模型、“单杆+电源”模型、“单杆 +电容”模型、“双杆”模型.
题型透析
电磁感应中的“单杆”模型 【基本模型】如图,金属导轨水平光滑,导轨间距为 L,导 体棒的质量为 m,回路总电阻为 R.导体棒在水平力 F 的作用下 运动,进入磁场时的速度为 v0,导体棒在磁场中的运动情况分析 如下:
定律:F=ma+B2L2(Rv0+at)
例 1 (2018·济南模拟 )如 图所示, 光滑的
“ ”形金属导体框竖直放置,质量为 m 的金 属棒 MN 与框架接触良好.磁感应强度分别为 B1、 B2 的有界匀强磁场方向相反,但均垂直于框架平 面,分别处在 abcd 和 cdef 区域.现从图示位置由静止释放金属 棒 MN,当金属棒进入磁场 B1 区域后,恰好做匀速运动.以下 说法中不正确的有( )
(完整版)电磁感应中双杆模型问题答案
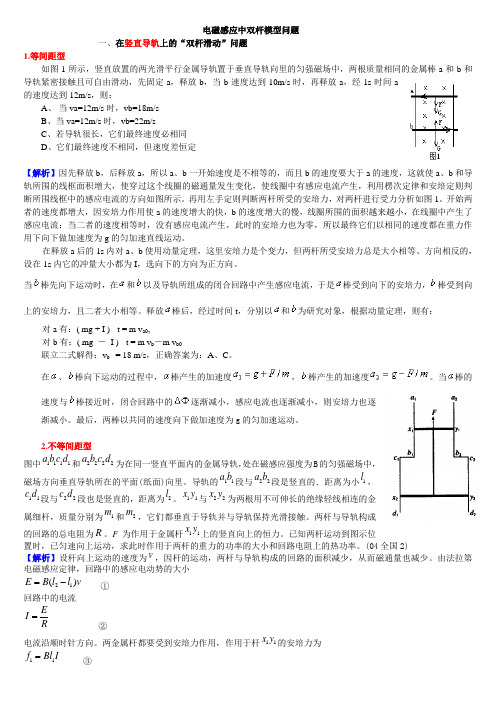
电磁感应中双杆模型问题一、在竖直导轨上的“双杆滑动”问题1.等间距型如图1所示,竖直放置的两光滑平行金属导轨置于垂直导轨向里的匀强磁场中,两根质量相同的金属棒a 和b 和导轨紧密接触且可自由滑动,先固定a ,释放b ,当b 速度达到10m/s 时,再释放a ,经1s 时间a 的速度达到12m/s ,则:A 、 当va=12m/s 时,vb=18m/sB 、当va=12m/s 时,vb=22m/sC 、若导轨很长,它们最终速度必相同D 、它们最终速度不相同,但速度差恒定【解析】因先释放b ,后释放a ,所以a 、b 一开始速度是不相等的,而且b 的速度要大于a 的速度,这就使a 、b 和导轨所围的线框面积增大,使穿过这个线圈的磁通量发生变化,使线圈中有感应电流产生,利用楞次定律和安培定则判断所围线框中的感应电流的方向如图所示。
再用左手定则判断两杆所受的安培力,对两杆进行受力分析如图1。
开始两者的速度都增大,因安培力作用使a 的速度增大的快,b 的速度增大的慢,线圈所围的面积越来越小,在线圈中产生了感应电流;当二者的速度相等时,没有感应电流产生,此时的安培力也为零,所以最终它们以相同的速度都在重力作用下向下做加速度为g 的匀加速直线运动。
在释放a 后的1s 内对a 、b 使用动量定理,这里安培力是个变力,但两杆所受安培力总是大小相等、方向相反的,设在1s 内它的冲量大小都为I ,选向下的方向为正方向。
当棒先向下运动时,在和以及导轨所组成的闭合回路中产生感应电流,于是棒受到向下的安培力,棒受到向上的安培力,且二者大小相等。
释放棒后,经过时间t ,分别以和为研究对象,根据动量定理,则有:对a 有:( mg + I ) · t = m v a0, 对b 有:( mg - I ) · t = m v b -m v b0联立二式解得:v b = 18 m/s ,正确答案为:A 、C 。
在、棒向下运动的过程中,棒产生的加速度,棒产生的加速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第九章冲刺985深化内容电磁感应失分点之(三)——电磁感应中的“杆+导轨”类问题(3大模型)电磁感应中的杆+导轨模型的实质是不同形式的能量的转化过程,处理这类问题要从功和能的观点入手,弄清导体棒切割磁感线过程中的能量转化关系,现从力学、图像、能量三种观点出发,分角度讨论如下:模型一 单杆+电阻+导轨模型[初建模型][母题] (2017·淮安模拟)如图所示,相距为L 的两条足够长的光滑平行金属导轨MN 、PQ 与水平面的夹角为θ,N 、Q 两点间接有阻值为R 的电阻。
整个装置处于磁感应强度为B 的匀强磁场中,磁场方向垂直导轨平面向下。
将质量为m 、阻值也为R 的金属杆cd 垂直放在导轨上,杆cd由静止释放,下滑距离x 时达到最大速度。
重力加速度为g ,导轨电阻不计,杆与导轨接触良好。
求:(1)杆cd 下滑的最大加速度和最大速度; (2)上述过程中,杆上产生的热量。
[思路点拨][解析] (1)设杆cd 下滑到某位置时速度为v , 则杆产生的感应电动势E =BLv , 回路中的感应电流I =E R +R杆所受的安培力F =BIL 根据牛顿第二定律有 mg sin θ-B 2L 2v2R=ma当速度v =0时,杆的加速度最大,最大加速度a =g sin θ,方向沿导轨平面向下 当杆的加速度a =0时,速度最大,最大速度v m =2mgR sin θB 2L 2,方向沿导轨平面向下。
(2)杆cd 从开始运动到达到最大速度过程中, 根据能量守恒定律得mgx sin θ=Q 总+12mv m 2又Q 杆=12Q 总,所以Q 杆=12mgx sin θ-m 3g 2R 2sin 2 θB 4L 4。
[答案] (1)g sin θ,方向沿导轨平面向下 2mgR sin θB 2L 2,方向沿导轨平面向下 (2)12mgx sin θ-m 3g 2R 2sin 2θB 4L 4[内化模型]单杆+电阻+导轨四种题型剖析杆以速度v 切割能量观点动能全部转化为内能:Q =12mv 02 F 做的功一部分转化为杆的动能,一部分转化为内能:W F =Q+12mv m 2 重力做的功(或减少的重力势能)一部分转化为杆的动能,一部分转化为内能:W G =Q +12mv m 2重力做的功(或减少的重力势能)一部分转化为杆的动能,一部分转化为内能:W G =Q +12mv m 2[变式] 此题若已知金属杆与导轨之间的动摩擦因数为μ。
现用沿导轨平面向上的恒定外力F 作用在金属杆cd 上,使cd 由静止开始沿导轨向上运动,求cd 的最大加速度和最大速度。
解析:分析金属杆运动时的受力情况可知,金属杆受重力、导轨平面的支持力、拉力、摩擦力和安培力五个力的作用,沿斜面方向由牛顿第二定律有F -mg sin θ-F 安-f =ma又F 安=BIL ,I =E R +R =BLv R +R ,所以F 安=BIL =B 2L 2vR +Rf =μN =μmg cos θ故F -mg sin θ-B 2L 2vR +R-μmg cos θ=ma当速度v =0时,杆的加速度最大,最大加速度a m =Fm -g sin θ-μg cos θ,方向沿导轨平面向上当杆的加速度a =0时,速度最大, v m =F -mg sin θ-μmg cos θ·2RB 2L2。
答案:见解析模型二 单杆+电容器(或电源)+导轨模型[初建模型][母题] (2017·北京模拟)如图所示,在竖直向下的磁感应强度为B 的匀强磁场中,两根足够长的平行光滑金属轨道MN 、PQ 固定在水平面内,相距为L 。
一质量为m 的导体棒cd 垂直于MN 、PQ 放在轨道上,与轨道接触良好。
轨道和导体棒的电阻均不计。
(1)如图1所示,若轨道左端M 、P 间接一阻值为R 的电阻,导体棒在拉力F 的作用下以速度v 沿轨道做匀速运动。
请通过公式推导证明:在任意一段时间Δt 内,拉力F 所做的功与电路获得的电能相等。
(2)如图2所示,若轨道左端接一电动势为E 、内阻为r 的电源和一阻值未知的电阻,闭合开关S ,导体棒从静止开始运动,经过一段时间后,导体棒达到最大速度v m ,求此时电源的输出功率。
(3)如图3所示,若轨道左端接一电容器,电容器的电容为C ,导体棒在水平拉力的作用下从静止开始向右运动。
电容器两极板间电势差随时间变化的图像如图4所示,已知t 1时刻电容器两极板间的电势差为U 1。
求导体棒运动过程中受到的水平拉力大小。
[思路点拨](1)导体棒匀速运动→受力平衡→求出拉力做的功。
导体棒切割磁感线产生感应电动势→产生感应电流→求出回路的电能。
(2)闭合开关S →导体棒变加速运动→产生的感应电动势不断增大→达到电源的路端电压→棒中没有电流→由此可求出电源与电阻所在回路的电流→电源的输出功率。
(3)导体棒在外力作用下运动→回路中形成充电电流→导体棒还受安培力的作用→由牛顿第二定律列式分析。
[解析] (1)导体棒切割磁感线,E =BLv 导体棒做匀速运动,F =F 安 又F 安=BIL ,其中I =ER在任意一段时间Δt 内,拉力F 所做的功W =Fv Δt =F 安v Δt =B 2L 2v 2R Δt电路获得的电能ΔE =qE =EI Δt =B 2L 2v 2RΔt可见,在任意一段时间Δt 内,拉力F 所做的功与电路获得的电能相等。
(2)导体棒达到最大速度v m 时,棒中没有电流,电源的路端电压U =BLv m =E -Ur电源的输出功率P =UI(3)感应电动势与电容器两极板间的电势差相等BLv =U 由电容器的U -t 图可知U =U 1t 1t 导体棒的速度随时间变化的关系为v =U 1BLt 1t可知导体棒做匀加速直线运动,其加速度a =U 1BLt 1由C =Q U 和I =Q t ,得I =CU t =CU 1t 1由牛顿第二定律有F -BIL =ma 可得F =BLCU 1t 1+mU 1BLt 1。
[答案] 见解析[内化模型]单杆+电容器(或电源)+导轨四种题型剖析开始时a =g ,杆F做的功一部分重力做的功一部重力做的功一部[变式]母题第(3)问变成,图3中导体棒在恒定水平外力F作用下,从静止开始运动,导轨与棒间的动摩擦因数为μ,写出导体棒的速度大小随时间变化的关系式。
解析:导体棒由静止开始做加速运动,电容器所带电荷量不断增加,电路中将形成充电电流,设某时刻棒的速度为v,则感应电动势为E=BLv电容器所带电荷量为Q=CE=CBLv再经过很短一段时间Δt,电容器两端电压的增量和电荷量的增量分别为ΔU=ΔE=BLΔvΔQ=CΔU=CBLΔv流过导体棒的电流I=ΔQΔt=CBLΔvΔt=CBLa导体棒受到的安培力f1=BIL=CB2L2a 导体棒所受到的摩擦力f2=μmg由牛顿第二定律得F-f1-f2=ma联立以上各式解得a=F-μmgm+CB2L2显然导体棒做匀加速直线运动,所以导体棒的速度大小随时间变化的关系式为v=F-μmgm+CB2L2t。
答案:v=F-μmgm+CB2L2t模型三双杆+导轨模型[初建模型][母题](1)如图1所示,两根平行的金属导轨,固定在同一水平面上,磁感应强度为B 的匀强磁场与导轨所在平面垂直,导轨的电阻很小,可忽略不计,导轨间的距离为l,两根质量均为m、电阻均为R的平行金属杆甲、乙可在导轨上无摩擦地滑动,滑动过程中与导轨保持垂直。
在t=0时刻,两杆都处于静止状态。
现有一与导轨平行,大小恒为F的力作用于金属杆甲上,使金属杆在导轨上滑动,试分析金属杆甲、乙的收尾运动情况。
(2)如图2所示,两根足够长的固定的平行金属导轨位于同一水平面内,导轨上横放着两根导体棒ab和cd,构成矩形回路。
在整个导轨平面内都有竖直向上的匀强磁场,设两导体棒均可沿导轨无摩擦地滑行。
开始时,棒cd静止,棒ab有指向棒cd的初速度。
若两导体棒在运动中始终不接触,试定性分析两棒的收尾运动情况。
[思路点拨](1)金属杆甲运动产生感应电动势→回路中有感应电流→乙受安培力的作用做加速运动→可求出某时刻回路中的总感应电动势→由牛顿第二定律列式判断。
(2)导体棒ab运动,回路中有感应电流→分析两导体棒的受力情况→分析导体棒的运动情况即可得出结论。
[解析](1)设某时刻甲和乙的速度大小分别为v1和v2,加速度大小分别为a1和a2,受到的安培力大小均为F1,则感应电动势为E=Bl(v1-v2)①感应电流为I=E2R②对甲和乙分别由牛顿第二定律得F-F1=ma1,F1=ma2③当v1-v2=定值(非零),即系统以恒定的加速度运动时a1=a2④解得a1=a2=F2m⑤可见甲、乙两金属杆最终水平向右做加速度相同的匀加速运动,速度一直增大。
(2)ab棒向cd棒运动时,两棒和导轨构成的回路面积变小,磁通量发生变化,回路中产生感应电流。
ab棒受到与运动方向相反的安培力作用做减速运动,cd棒则在安培力作用下做加速运动,在ab 棒的速度大于cd 棒的速度时,回路中总有感应电流,ab 棒继续减速,cd 棒继续加速。
两棒达到相同速度后,回路面积保持不变,磁通量不变化,不产生感应电流,两棒以相同的速度v 水平向右做匀速运动。
[答案] 见解析[内化模型]三大观点透彻解读双杆模型 示意图力学观点 图像观点 能量观点导体棒1受安培力的作用做加速度减小的减速运动,导体棒2受安培力的作用做加速度减小的加速运动,最后两棒以相同的速度做匀速直线运动棒1动能的减少量=棒2动能的增加量+焦耳热两棒以相同的加速度做匀加速直线运动外力做的功=棒1的动能+棒2的动能+焦耳热[变式] 若母题(1)中甲、乙两金属杆受恒力作用情况如图所示,两杆分别在方向相反的恒力作用下运动(两杆不会相撞),试分析这种情况下甲、乙金属杆的收尾运动情况。
解析:设某时刻甲和乙的速度分别为v 1和v 2,加速度分别为a 1和a 2,甲、乙受到的安培力大小均为F 1,则感应电动势为E =Bl (v 1-v 2) ①感应电流为I =E2R②对甲和乙分别应用牛顿第二定律得 F 1-BIl =ma 1,BIl -F 2=ma 2 ③ 当v 1-v 2=定值(非零),即系统以恒定的加速度运动时a 1=a 2 ④ 解得a 1=a 2=F 1-F 22m⑤可见甲、乙两金属杆最终做加速度相同的匀加速运动,速度一直增大。
答案:见解析[提能增分集训] 1.如图所示,一对光滑的平行金属导轨固定在同一水平面内,导轨间距l =0.5 m ,左端接有阻值R =0.3 Ω的电阻。
一质量m =0.1 kg 、电阻r =0.1 Ω的金属棒MN 放置在导轨上,整个装置置于竖直向上的匀强磁场中,磁场的磁感应强度B =0.4 T 。