设二阶控制系统的单位阶跃响应曲线如图所示
自动控制原理习题及解答
对于本例,系统的稳态误差为
本题给定的开环传递函数中只含一个积分环节,即系统为1型系统,所以
系统的稳态误差为
解毕。
例3-21控制系统的结构图如图3-37所示。假设输入信号为r(t)=at( 为任意常数)。
解劳斯表为
1 18
8 16
由于特征方程式中所有系数均为正值,且劳斯行列表左端第一列的所有项均具有正号,满足系统稳定的充分和必要条件,所以系统是稳定的。解毕。
例3-17已知系统特征方程为
试判断系统稳定性。
解本例是应用劳斯判据判断系统稳定性的一种特殊情况。如果在劳斯行列表中某一行的第一列项等于零,但其余各项不等于零或没有,这时可用一个很小的正数ε来代替为零的一项,从而可使劳斯行列表继续算下去。
(3)写中间变量关系式
式中,α为空气阻力系数 为运动线速度。
(4)消中间变量得运动方程式
(2-1)
此方程为二阶非线性齐次方程。
(5)线性化
由前可知,在=0的附近,非线性函数sin≈,故代入式(2-1)可得线性化方程为
例2-3已知机械旋转系统如图2-3所示,试列出系统运动方程。
图2-3机械旋转系统
解:(1)设输入量作用力矩Mf,输出为旋转角速度。
运动方程可直接用复阻抗写出:
整理成因果关系:
图2-15电气系统结构图
画结构图如图2-15所示:
求传递函数为:
对上述两个系统传递函数,结构图进行比较后可以看出。两个系统是相似的。机一电系统之间相似量的对应关系见表2-1。
表2-1相似量
机械系统
xi
x0
自动控制原理C作业(第二章)答案
4 3
0.1
图 3-1 二阶控制系统的单位阶跃响应
解 在单位阶跃作用下响应的稳态值为 3,故此系统的增益不是 1,而是 3。系统模型为
(s)
s2
3
2 n
2n s
2 n
然后由响应的 p % 、 t p 及相应公式,即可换算出 、 n 。
p%
c(t p ) c() c()
4
3
3
33%
t p 0.1(s)
P1 G1G2
1 1
P2 G2G4
2 1
因此,传递函数为
C(s) P11 P2 2
R(s)
G2G1 G4G2 1 G1G2G3
3
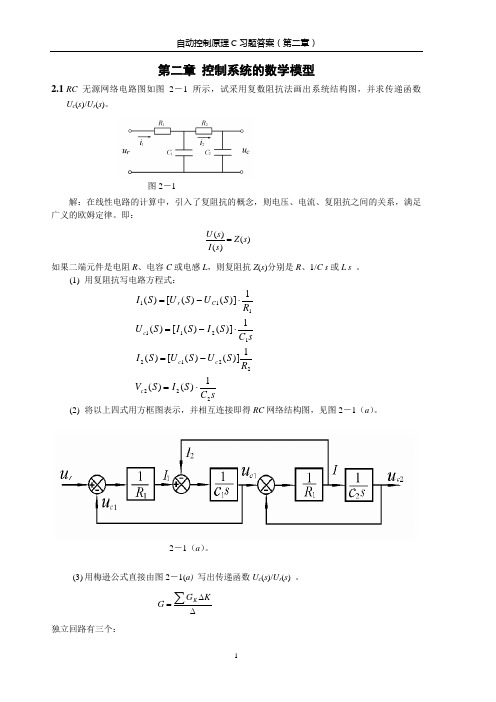
自动控制原理 C 习题答案(第二章)
2.4 用梅森公式求系统传递函数。
R(S)
-
_
+ G1(s)
- _
G2(s)
+ C(S)
+
图 2-4 解: 单独回路 5 个,即
L1
1 R
1 C1S
1 R1C1S
11
1
L2
R2
C2S
R2C2 S
L3
1 C1S
1 R2
1 R2C1S
回路相互不接触的情况只有 L1 和 L2 两个回路。则
L12
L1L2
1 R1C1R2C2S 2
由上式可写出特征式为:
1
( L1
L2
L3 )
L1 L2
1
1 R1C1S
1 R2C2 S
1 R2C1S
1 R1C1R2C2S 2
益 K1 和速度反馈系数 Kt 。同时,确定在此 K1 和 Kt 数值下系统的延迟时间、上升时间和调节时间。
控制工程技术课后习题答案

1习题1-1 试列举几个日常生活中的开环和闭环控制系统的例子,并说明其工作原理。
1-2 根据题1-1图所示的电动机速度控制系统工作原理图:(1)将a ,b 与c ,d 用线连接成负反馈系统;(2)画出系统方框图。
1-3 下图是水位控制系统的示意图,图中1Q ,2Q 分别为进水流量和出水流量。
控制的目的是保持水位为一定的高度。
试说明该系统的工作原理并画出其方框图。
1-4 仓库大门自动控制系统如图1-3所示,试分析系统的工作原理,绘制系统的方框图,指出各实际元件的功能及输入、输出量。
2习题2-1 求下列函数的拉氏变换。
(1)t t t f 4cos 4sin )(+= (2)t e t t f 43)(+= (3)t te t f --=1)( (4)()cos3t f t e t -=2-2求下列函数的拉氏反变换。
(1))3)(2(1)(+++=s s s s F(2)()()()2114F s s s =++(3)()225sF s s s =-+(4)()221225s F s s s +=++(5) )3()1(2)(2=++=s s s s s G (6) ))()(()()(c s b s a s d s s G ++++=(7) 152122)(2+++=s s s s G2-3 解微分方程()()()22681d y t dy t y t dt dt++=,初始条件:(0)1y =,'(0)0y = 。
2-4 试证明图2-75所示电气系统与机械系统具有相同的传递函数。
图2-75 题2-4 图2-5 试分别写出图2-76中各有源网络的传递函数。
(1) (2)图2-76 题2-5图2-6系统的方框图如图2-77所示,试求该系统的输入输出传递函数。
图2-77 题2-6图2-7 系统的方框图如图2-78所示,试用梅逊公式求传递函数。
图2-78 题2-7图2-8 已知系统结构如图2-79所示。
自动控制原理_王万良(课后答案5

第5章习题5.1 已知系统的单位阶跃响应为t te et c 10602.12.01)(−−−+=,试求:(1) 系统的传递函数;(2) 系统的阻尼比ξ和自然振荡频率n ω。
*答案:(1))10)(60(600)(++=s s s s G(2)43.1=ξ 5.24=n ω5.2 设单位反馈系统的开环传递函数为)1(1)(+=s s s G试求系统的上升时间r t 、超调时间p t 、超调量%p σ和调节时间s t 。
*答案:42.2=r t 625.3=p t%3.16=σ ⎩⎨⎧=∆=∆=2856s t5.3 要求图题5.3所示系统具有性能指标:%20%=p σ,s t p 1=。
试确定系统参数K 和A ,并计算r t ,s t 。
图题5.3*答案:5.60=K 135.0=A5.4图题5.4所示控制系统,为使闭环极点为s j1=−±,试确定K 和α的值,并确定这时系统阶跃响应的超调量。
*答案: 2=K1=α 35.0=r t ⎩⎨=∆=5654.0s t5.5 设典型二阶线性定常系统的单位阶跃响应曲线如图题5.5所示 (1)求阻尼比ς和自然振荡频率n ω;(2)画出等效的单位反馈系统; (3)写出相应的开环传递函数。
)10(100)(+=S S s G 图题5.5*答案(1)4.0=ζ 4.11=n ω(3)9.12)s(s 129.96)(+=s G5.6图题5.6所示采样控制系统,已知图中线性网络部分的单位阶跃响应为1−−e t,采样周期为T ,求系统在输入单位阶跃信号时的输出响应y nT ()。
零阶保持器线性网络uy T图题5.6*答案:nTenT y −=1)(5.7 试求下列状态方程的解,设初始状态为)0(x 。
x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−−−=300020001& 答案:)0()(32x e e e t x t tt⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=−−−5.8 求下列状态方程在单位阶跃输入作用下的响应。
自动控制原理 第三章课后答案

3-1设温度计需要在一分钟内指示出响应值的98%,并且假设温度计为一阶系统,求时间常数T 。
如果将温度计放在澡盆内,澡盆的温度以10C/min 的速度线性变化。
求温度计的误差。
解:c(t)=c(∞)98%t=4T=1 min r(t)=10te(t)=r(t)-c(t)c(t)=10(t-T+e )-t/T =10(T-e )-t/T =10T =2.5T=0.253-2电路系统如图所示,其中F C k R k R μ5.2,200,20110=Ω=Ω=。
设系统初始状态为零,试求:系统的单位阶跃响应8)()(1=t u t u c c 以及时的1t 值;解:R 1Cs+1R 1/R 0G (s )= u c (t)=K(1–e t T -)KTs +1=T=R 1C=0.5 K=R 1/R 0=10=10(1–e -2t )8=10(1–e -2t)0.8=1–e-2te -2t =0.2 t=0.8g(t)=e -t/T T Kt 1=0.8=4u c (t)=K(t-T+T e -t/T )=4R(s)=1s 2R(s)=1R(s)=1s 3T 2=K(s s+1/T+T s 2-1s 3-T 2)=1.2Ts 1s 3K +1U c (s)= -0.5t+0.25-0.25e -2t )12t 2u c (t)=10(3-3已知单位反馈系统的开环传递函数为)5(4)(+=s s s G 试求该系统的单位阶跃响应。
解:C(s)=s 2+5s+4R(s)4s(s+1)(s+4)C(s)=4R(s)=s1s+41+1/3s =4/3s +1-c(t)=1+ 4e 13-4t -t 3-e3-4已知单位负反馈系统的开环传递函数为 )1(1)(+=s s s G 试求该系统的上升时间r t 。
、峰值时间p t 、超调量%σ和调整时间s t 。
1s(s+1)G(s)=t p =d ωπ 3.140.866= =3.63t s = ζ3ωn=6t s = ζ4ωn =8解:C(s)=s 2+s+1R(s)12= 1ωn 2ωn ζ=1ζ=0.5=1ωn =0.866d ω= ωn 2 ζ1-=60o -1ζ=tg β21-ζt r =d ωπβ-= 3.14-3.14/30.866=2.42σ%=100%e -ζζπ1-2=16%e -1.83-6已知系统的单位阶跃响应为t te et c 10602.12.01)(---+= ,试求:(1)系统的闭环传递函数;(2)系统的阻尼比ζ和无阻尼自然震荡频率n ω;解:s+60+C(s)=0.21s 1.2s +10-s(s+60)(s+10)=600=s 2+70s+600C(s)R(s)600R(s)=s 12=600ωn2ωn ζ=70ζ=1.43=24.5ωn3-7设二阶控制系统的单位阶跃响应曲线如图所示,如果该系统为单位负反馈系统,试确定其开环传递函数。
自动控制理论复习题

自动控制理论复习题一、名词解释:1、频率响应 2、反馈 3、稳态误差4、最大超调量 5、单位阶跃响应6、相位裕量7、滞后一超前校正;8、稳态响应;9、频率特性;10、调整时间;11、峰值时间;12、截止频率;13、谐振峰值;14、谐振频率15、幅值穿越频率;16、相位穿越频率;17、幅值裕量;18、自动控制、19、状态变量、20、零阶保持器二、分别建立图示系统的微分方程,求传递函数,并说出图(c ),(d)属于何种 较正网络。
图中)(t x i ,)(0t x 为输入、输出位移;)(t u i ,)(0t u 为输入、输出电压。
三、已知系统方框图如下,求传递函数)(,)(,)(000s X s X s X)(a )(b )t )t )(c )(t x i 1)(0t x )(d )(0s )(b X i )s X i )s四、已知系统的开环的幅相特性(Nyguist )如图所示,图中P 为开环传递函数G(s)H(s)五、计算 1、设某二阶系统的单位阶跃响应曲线如图所示,如果该系统为单位反馈型式,试确定其开环传递函数。
2、某系统如图所示,n p t 调整时间 s t 。
(设误差带宽度取±2% ))(c )(a))(a )(b ))六、已知系统的开环传递函数)()(s H s G 的幅频特性曲线如图示,且)()(s H s G 为最小相位系统。
试求)()(s H s G = ?七、某系统的开环传递函数为)12()1()()(-+=s s sK s H s G ,试画出其乃奎斯特图,并说明当K取何值时系统稳定?八、已知系统闭环传递函数为))()(01221101a s a s a s a s a a s a s X s X n n n n i +++⋅⋅⋅+++=-- 试证明系统对速度输入的稳态误差为零。
十、判断正误1、各项时域指标(最大超调量,调整时间等)是在斜坡信号作用下定义的。
2、对于结构不稳定系统,可以通过改变某些系统结构参数而使其稳定。
自动控制原理习题及其解答第三章

第三章例3-1 系统的结构图如图3-1所示。
已知传递函数 )12.0/(10)(+=s s G 。
今欲采用加负反馈的办法,将过渡过程时间t s减小为原来的0.1倍,并保证总放大系数不变。
试确定参数K h 和K 0的数值。
解 首先求出系统的传递函数φ(s ),并整理为标准式,然后与指标、参数的条件对照。
一阶系统的过渡过程时间t s 与其时间常数成正比。
根据要求,总传递函数应为)110/2.0(10)(+=s s φ即HH K s K s G K s G K s R s C 1012.010)(1)()()(00++=+= )()11012.0(101100s s K K K HHφ=+++=比较系数得⎪⎩⎪⎨⎧=+=+1010110101100H HK K K 解之得9.0=H K 、100=K解毕。
例3-10 某系统在输入信号r (t )=(1+t )1(t )作用下,测得输出响应为:t e t t c 109.0)9.0()(--+= (t ≥0)已知初始条件为零,试求系统的传递函数)(s φ。
解 因为22111)(ss s s s R +=+=)10()1(10109.09.01)]([)(22++=+-+==s s s s s s t c L s C 故系统传递函数为11.01)()()(+==s s R s C s φ 解毕。
例3-3 设控制系统如图3-2所示。
试分析参数b 的取值对系统阶跃响应动态性能的影响。
解 由图得闭环传递函数为1)()(++=s bK T Ks φ系统是一阶的。
动态性能指标为)(3)(2.2)(69.0bK T t bK T t bK T t s r d +=+=+= 因此,b 的取值大将会使阶跃响应的延迟时间、上升时间和调节时间都加长。
解毕。
例 3-12 设二阶控制系统的单位阶跃响应曲线如图3-34所示。
试确定系统的传递函数。
解 首先明显看出,在单位阶跃作用下响应的稳态值为3,故此系统的增益不是1,而是3。
自动控制原理 习题解答

3-8
已知系统的闭环传递函数为 GB (s)
=
Y (s) R(s)
=
(s2
15.36(s + 6.25)
,试估算
+ 2s + 2)(s + 6)(s + 8)
系统性能指标。
解:高阶系统可以降阶,系统有一对零极点 − 6.25 和 − 6 ,是对偶极子,可以相消。 系统剩下三个极点 −1 ± j 和-8,显然 −1 ± j 是系统的主导极点,所以系统降阶后,闭环传
解 (1) 当τ = 0时则原系统 的开环传递函数为
G(s) = 10 s(s + 2)
3-2
与G(s) =
ω
2 n
比较可知
s(s + 2ζωn )
由
ω2ζn2ω=n
10 =
2
得
ωn = 10
ζ =
10
10
(2) 当τ ≠ 0时则原系统 的开环传递函数为
G(s) =
10
s(s + 2 +10τ )
3-10 设单位反馈系统的开环传递函数如下,试确定系统稳定时 K 的取值范围。
(1) G(s)H (s) =
K
s(s + 1)(0.2s + 1)
(2) G(s)H (s) = K (0.2s + 1) s(s + 1)(s + 1)
解 (1) 闭环传递函数为
∴GB (s)
=
K s(s + 1)(0.2s + 1) + K
=
0.2s 3
K + 1.2s 2
+s+
K
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、设二阶控制系统的单位阶跃响应曲线如图所示,若该系统为单位反馈控制系统,
试确定其单位传递函数。
(20%)
2、已知某系统结构图如下,求其闭环传递函数C(S)/R(S)。
(10%)
3、已知单位反馈系统,开环传函为G(S)=K/[S(TS+1)],要求单位阶跃函数
作用时,超调量为16%,调节时间为7,求K,T。
(10%)
4、已知单位反馈系统,开环传函为G(S)=k(S+1)/[S(S+1/2)2],试绘制k从零趋
近于无穷大时的根轨迹。
(10%)
5、已知最小相位系统开环频率特性的伯德图,(1)求开环增益K。
(2)求穿越频
率wc。
(3)写出开环传递函数。
(4)求相角裕度。
(5)求幅值裕度。
(6)判断闭环系统的稳定性。
(15%)
6、求使图示系统稳定的K值的范围。
(10%)
7、已知线性元件的频率特性及非线性元件描述函数有关的曲线,两者串联起来构
成一单位反馈系统图示,判断系统是否存在自振。
(5%)
8、试小结用频率法进行超前校正的主要步骤。
(10%)
9、某离散系统的闭环脉冲传递函数为G(z)=(3.68z+2.64)/(z2+2.31z+3),判断该系
统的稳定性。
(10%)。