机器人控制板电路图
ABB机器人IRC5C控制器电路图
1
2
3
4
5
6
7
8
Table of contents
Plant Location Page 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 Page description COPYRIGHT TITLE PAGE Table of contents: Table of contents: REVISION INFORMATION Front View Top View Side View BLOCK DIAGRAM MAIN POWER INPUT POWER SUPPLY DSQC 661 AND 662 EMERGENCY STOP RUN CHAIN OPERATING SAFETY STOP POWER UNIT RUN CHAIN EXT OPERATING MODE SELECTOR, 2MODES FPU, FLEXPENDANT Main Computer/AnybusCC/RS232 Exp./Interface Board/ MAIN COMPUTER A31 DSQC1000 MAIN COMPUTER A31 DSQC1000 ; A32 DSQC1003 FIELDBUS ADAPTER A32: DEVICENET A31.2 m/s DSQC1006 DIGITAL I/O UNIT INPUT DIGITAL I/O UNIT OUTPUT DIGITAL PART OF COMBI I/O AND DIGITAL I/O UNIT DSQC652 COMBI I/O UNIT DSQC651 RELAY I/O UNIT DSQC653 RELAY I/O UNIT DSQC653 REMOTE I/O UNIT DSQC350A Page supplementary field Date 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014
《机器人的控制系统》课件
自主导航
通过路径规划和导航算法,实现无人机的自主飞行和自动巡航。
THANKS
功能
机器人控制系统的主要功能包括感知 、决策、执行和反馈,使机器人能够 自主或半自主地完成复杂任务。
机器人控制系统的组成与分类
组成
机器人控制系统通常由感知系统、决策系统、执行系统和反馈系统等组成。
分类
根据控制方式和结构,机器人控制系统可分为集中式、分布式和混合式控制系 统。
机器人控制系统的历史与发展
历史
机器人控制系统的发展可以追溯到20世纪50年代,随着计算 机技术、传感器技术和算法的发展,机器人控制系统的性能 和功能不断得到提升。
发展
未来机器人控制系统的发展将更加注重智能化、自主化和协 同化,同时随着技术的进步,机器人控制系统将更加广泛地 应用于各个领域。
02
机器人感知系统
感知系统的组成与功能
《机器人的控制系统》ppt课件
$number {01}
目录
• 机器人控制系统概述 • 机器人感知系统 • 机器人运动控制系统 • 机器人智能决策系统 • 机器人控制系统实例分析
01
机器人控制系统概述
机器人控制系统的定义与功能
定义
机器人控制系统是用于指导机器人完 成预设任务的一系列软硬件设备和算 法。
组成
智能决策系统由感知、决策和执行三个部分 组成。感知部分负责收集环境信息,决策部 分根据感知信息进行决策,执行部分则根据 决策结果控制机器人行动。
功能
智能决策系统的主要功能是使机器人能够自 主地适应环境变化,进行有效的任务规划和 行动决策,提高机器人的自主性和智能化水 平。
决策算法与实现
决策算法
感知系统的组成
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)课程设计
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)-课程设计单片机自动清洁机器人设计最近在电视看到一款能够遥控移动的吸尘器,圆形的和遥控汽车差不多,我感觉到如果再不把自己的想法写出来,自己的创意会被很多人实现,我几年前就想设计一款能够打扫卫生的机器人,直到看到电视里的那个东西,我意识到,我要自己做一个出来。
移动机构是清洁机器人的主体,决定了清洁机器人的运动空间,一般采用轮式结构。
传感器系统一般采用超声波传感器、红外光电传感器、接触传感器等构成多传感器系统。
随着近年来控制技术、传感技术以及移动机器人技术等技术的迅速发展,智能清洁机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。
吸尘系统在原理上与传统立式吸尘器相同,主要是在结构设计上更多考虑结构尺寸、集成度以及一些辅助机构的合理布置和利用,以此来提高能源利用率和工作效率。
现在的智能清洁机器人通过软硬件的合理设计,使其能够自动避开障碍物,实现一般家居环境下的自主清洁工作。
它的主要功能有: 1 能够自动熟悉地形,了解房间布局,感知自己的方位,记录和分析环境卫生状况,容易脏的地方多打扫,干净的地方少打扫,节省能源。
2能够自动补充能量。
当检测到电源不足时,自动找到电源,并充电。
充电结束自动专为待机状态。
3当垃圾装满后自动打包,并将垃圾放到主人指定的地点。
4能够检测主人是否在家,只有当主人不在家时,才出来打扫卫生,主人在家时机器人休息。
保证不影响主人的正常生活。
可行性分析:1应用超声波测距和滚轮定位就可以测到自己的位置,给据吸入垃圾量的多少,就可以分析出,那干净那里脏.2应用简单的空中加油技术就可以把自动充电搞定。
检测电源能量多少,和是否充满就更简单了.3垃圾打包只用简单的打包技术就可以解决.4机器人上装上热释红外探测器就知道主人在不在了..5剩下的功能,好多玩具里都有,只要把吸尘器和遥控车结合起来就搞定了1 系统整体方案设计1.1 制作清洁机器人的任务与要求:任务: 清洁机器人在场地上任意运动并吸尘,当遇到障碍物时,可自主避开障碍物绕道继续运动(轨迹由团队设定)。
机器人现场编程-川崎机器人IO信号的连接19页PPT

2. 外部马达电源ON 1)使用“外部马达电源 ON”时的连接 短接 1TR 板端子块连接器 X9 的引脚 5-6,开启马达电源至 ON。在连
接器 X9 上的引脚 5和 6 之间连接一个开关或继电器触点。须使用脉冲信号, 不允许一直闭合。
2)不使用“外部马达电源 ON”时的连接 断开 1TR 板端子块连接器 X9 的引脚 5-6,在这两个引脚之间不连任
4. 外部暂停 1)使用“外部保持” 将 1TR 板端子块连接器 X9 的引脚 7-8 上的跳接线去除,按下图连接
外部暂停触点。此触点开路时,机器人将暂停。
2)不使用“外部暂停” 在 1TR 板的端子块连接器 X9 连接器上,将引脚 7-8 跳接。
5. 示教/再现(硬件输出信号) 此信号从 1TR 板端子块连接器 X8 的引脚 9-10 上输出。
三、课程预告
川崎工业机器人I/O信号的应用实例
The End!
谢谢
图所示连接安全围栏的开关触点。
2)不使用“安全围栏输入”时的连接 将1TR 板的端子块连接器 X8 的引脚 1-2,3-4跳线。
(3)外部触发开关输入(仅在示教模式下有效) 1)使用“外部触发开关输入”(使用2 个安全回路)
2)不使用“外部触发开关输入” 将 1TR 板端子块连接器 X8 的引脚 5-6 和 7-8 跳接。
一、I/O信号的连接
川崎RS10L工业机器人的硬件专用信号连接
到E20控制器的1TR 板的端子块上(X7、
X8、X9连接器)。
川崎RS10L工业机器人的通用信号(包括软 件专用信号)连接到E20的由控制器中的
1TW 板处的连接器上(CN2、CN4连
接头)。
E20控制器内部结构
一、I/O信号的连接-硬件专用信号的连接
机器人行走设计电路设计讲解
课程设计任务书学生姓名:冀阳博专业班级:电气1001指导教师:龚跃玲工作单位:自动化学院1、题目: 机器人行走电路设计任务:设计一个能前进、后退的机器人行走控制电路。
要求:1)接通电源,机器人前进,行走一段时间后,机器人自动后退,退行一段时间后自动前行,周而复始。
2)机器人行走动力只能使用干电池,不能使用动力电源。
3)机器人前进、后退时间可调。
4)对设计电路进行仿真。
2、初始条件1.实验室提供万用表、信号发生器、直流稳压电源、示波器等设备。
2.学生已学习了大学基础课程和《电路》、《模拟电子技术》、《数字电子技术》、《电力电子变流技术》等专业基础课程。
3.主要参考文献1)《新编电子电路大全》第1、2、3、4卷中国计量出版社2)《传感器及其应用电路》何希才编著电子工业出版社3)《电力电子变流技术》黄俊王兆安编机械工业出版社4)《集成电路速查手册》王新贤主编山东科学技术出版社5)《集成电路速查大全》尹雪飞陈克安编西安电子科技大学出版社6)《晶体二极管手册》各种版本皆可7)《晶体三极管手册》各种版本皆可3、要求完成的主要任务1.课程设计结束时每个学生要交一份按统一格式要求撰写的课程设计说明书,并装订成册。
2.课程设计说明书中每个题目要求有方案比较、绘制方框图、电原理图,阐述电路工作原理、每个元器件的主要参数、设计电路的性能指标及电路仿真效果图等。
3.说明书中除个人签名外,其它文字、符号、图形或表格一律用计算机打印。
4.文字、符号、图形等必须符合国家标准。
5.独立完成设计任务,严禁相互抄袭。
4、时间安排设计时间为二周(6月25日—7月6日),安排如下:1.6月25日上午,指导教师讲授课程设计的有关基本知识等。
2.6月25日下午——7月1日学生查阅资料,完成初步设计。
3.7月2日——7月3日检查设计进度,答疑、质疑。
4.7月4日——7月5日完善设计,形成设计说明书电子文档。
4.7月5日——7月6日课程设计打印、装订、提交。
机器人控制系统关键模块的电路设计
利 用 此 集 成 稳 压 器 ,8 的 锂 电 池 通 V 过 L 7 0 稳 压 到 5 , 给 7 H 0 、 L 3 4 M85 V 4 C4 M 2 、 7 L 8 、7 L 7 、单 轴 倾 角 传 感 器 以 及光 4S6 4S4 隔供 电,而 2V 电池 ,给 直 流 电机 、继 电 9锂
<> 2 翻越 山路 。 <> 3 穿过 森 林 。 < > 客 自动 机器 人从 k g ( ) 4旅 a o轿 下轿 。
<> 5 旅客 自动 机 器人 击 打三 个 鼓 。
压 , 这样 就 必 须 给 系 统 设计 好 个 稳 J 玉电
< > 客 自动机 器 人和 鼓 槌 都不 能接 触 路 ,保 证 系统 的平 稳 运行 。 6旅 自动 或手 动 轿夫 的机 器 人 。 I )选 择集 成 稳压 器件 3方 案 分析 设计 . 集成 稳 压 器 种 类 多 样 ,可 根 据 外 在 形 要 实 现 上 述 运 动 动 作 , 完成 运 动 的可 状 作 _ 不 同分 为三 端 集 成 稳 压 器 和 多 端 集 } } j 靠性 ,灵 活 性 ,必 须 使 两机 器人 和 轿 子 之 成 稳 压 器 。 其 中 t 端 稳 压 器 件 外 接 元 件 间进 行 配 合 协 作 ,涉 及 到ห้องสมุดไป่ตู้自动控 制系 统 中 少 、 造 价 便 宜 ,便 于使 用 、维 护 ,安 全 稳 的 多 个关 键 模 块 的 设 计 。如 控 制 系统 的处 定 ,满足 要 求 。 因此 ,在 此 选 取 最 大 输 出 A 理 结 构 ,如 何 选 用 单 片 机 , 电源 稳 压 模 块 电流 可达 1 三 端 串 联 型稳 压 器 来 作 为 电压
的 设计 ,继 电器 控 制 模 块 设 计 , 电机 功 率 放 大 驱动 模 块 设 计 以及 方 向控 制 的舵 机 设 计 等 等 。 在此 只 对 电源 稳 压 模 块 和 继 电器 控制 模块 的设计 进行 阐述 。 ( )电源 稳压 模 块 电路 设计 1 由 于供 能 的需 要 ,需 分 别 对 单 片机 系 统 和 外 部 辅助 元 件 进 行 供 电 ,采 用 双 电源 配 置 ,这 样 才 能 使 整个 控 制 系 统 更 稳 定 、 可 靠 。 而 电源 在使 用 过 程 中 电压 会 降 低 , 那 就 必 须 把 电源 的稳 压 电源 调 低 ,使 之 相 匹 配 ,并 使 单 片机 获得 稳 定 的直 流 供 电 电
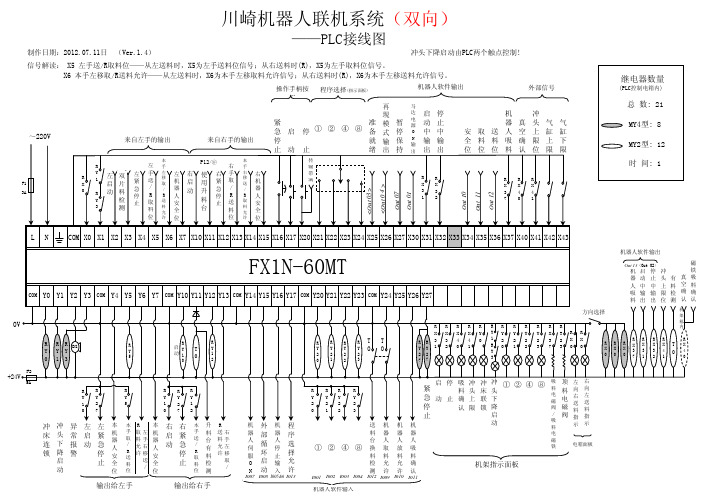
川崎机器人联机系统-PLC控制电路图
右 向 左 送 料 指 示
电箱面板
① ② ④ ⑧
机架指示面板
I007 I008 I005&6 I013
I001 I002 I003 I004 I012 I009 I010 I011
输出给左手
输出给右手
机器人软件输入
机器人软件输出
Out 13 <Out 02>
Out 11
Out 12
R X 0
R Y 1
左 双 启 片 动 料 检 测
左 紧 急 停 止
左 手 送 / R 取 料 位
本 手 左 移 取 / R 送 料 允 许
P12/⑧ 左 机 器 人 安 全 位
右 启 动
使 用 升 料 台
右 紧 急 停 止
右 手 取 / R 送 料 位
继电器数量
机器人软件输出 操作手柄按 钮 程序选择(指示面板) 外部信号
(PLC控制电箱内)
~220V
来自左手的输出 来自右手的输出
紧 急 启 停 止 动
① ② ④ ⑧ 停 止
传 输 带 满
准 备 就 绪
再 现 模 式 输 出
暂 停 保 持
马 达 电 源 O N 输 出
总 数: 21
启 动 中 输 出 停 止 中 输 出 机 器 安 取 送 人 全 料 料 吸 位 位 位 料 真 空 确 认 冲 头 上 限 位 气 缸 上 限 气 缸 下 限
MY4型: 8 MY2型: 12 时 间: 1
F1 3A
<Out 03>
<Out 04>
Out 07
Out 01
Out 10
R Y 3
L
N
COM X0 X1 X2 X3 X4 X5 X6 X7 X10 X11 X12 X13 X14 X15 X16 X17 X20 X21 X22 X23 X24 X25 X26 X27 X30 X31 X32 X33 X34 X35 X36 X37 X40 X41 X42 X43
基于S7-300的机械手臂自动控制系统说明书

摘要随着自动化生产程度的提高,PLC 在生产控制系统中的应用也越来越广泛。
本设计是基于西门子公司S7-300可编程控制器,设计了机械手臂PLC控制的自动控制系统。
该工艺过程主要是完成对电机的控制。
系统主要由变频器、转台电机、液压泵电机、采样头电机、输送机、破碎机、缩分机、收集器以及控制系统组成。
通过对系统主电路、控制电路设计,给出了机械手臂自动控制系统完整的硬件接线图和流程图。
根据机械手臂的生产工艺要求,设计并使用STEP 7编制了一套适用于该生产工艺的梯形图。
利用Simens公司的Wincc完成了机械手臂的监控界面。
本设计过程中涉及较多的开关量输入输出点,故选用配置灵活的模块式结构PLC 以提高系统的可靠性与处理效率。
关键词: S7-300;机械手臂;自动控制AbstractWith the improvement of automatic production, the PLC application in production control system is also more and more broad. This design based on the Siemens S7-300 programmable controller, PLC controlled robotic arm designed automatic control system. The key is to complete the process of motor control. System mainly consists of inverter, turntable motor, hydraulic pump motor, the sampling hea d and the motor, conveyor, crusher, reduced extension, the collector and the control system.Through the design of system main circuit and control circuit, gives the complete hardware of the control system wiring diagrams and flow charts.According to the mechanical arm's technique of production's request, Design and use STEP 7 for the preparation of a ladder in the production process. Wincc by Simens company completed a mechanical arm monitoring interface.This design involves more switches quantity input output spot, the simulation quantity input output spot, therefore selects input output disposition nimble module type structure PLC to enhance the system the reliability and the processing efficiency.Key Words:S7-300;Mechanical arm;Automatic control目录第一章绪论 (1)1.1设计背景 (1)1.2设计目的 (1)1.3国内外研究现状和趋势 (2)1.4设计原则 (3)第二章系统方案设计 (4)2.1设计依据 (4)2.2各部分功能分述 (5)2.2.1 采样过程 (5)2.2.2 制样过程 (5)2.3控制方案的比较、论证和确定 (5)2.3.1 方案的比较 (5)2.3.2 方案论证及确定 (8)2.4系统结构图 (9)第三章系统硬件设计 (10)3.1设计依据 (10)3.2硬件设计 (10)3.3电动机选型 (14)3.4变频器设计 (15)3.4.1 概述 (15)3.4.2 变频器分类 (15)3.4.3 变频器的组成、工作原理及控制方式 (15)3.4.4 变频器选择 (18)3.5硬件地址配置 (20)3.6控制系统模块选择 (22)3.6.1 设计依据 (22)3.6.2 S7-300系列PLC组成 (23)3.6.3 S7-300PLC特点 (24)3.6.4 模块选择 (24)第四章控制系统软件设计 (32)4.1软件设计分析 (32)4.2系统流程图 (32)4.3STEP7编程过程 (37)4.3.1 建立工程 (37)4.3.2 硬件配置 (37)4.3.3 STEP 7编程 (38)第五章组态画面设计 (40)5.1组态软件概述 (40)5.2WINCC的介绍 (40)5.3画面组态 (40)5.3.1 建立主界面 (40)5.3.2 建立手动控制界面 (41)5.3.3 动作过程 (42)第六章 S7-300与WINCC通讯 (43)总结 (46)参考文献 (47)英文翻译原文 (48)英文翻译译文 (60)致谢 (69)附录 (70)第一章绪论1.1 设计背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。