机器人电路图
ABB机器人IRC5C控制器电路图
1
2
3
4
5
6
7
8
Table of contents
Plant Location Page 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 Page description COPYRIGHT TITLE PAGE Table of contents: Table of contents: REVISION INFORMATION Front View Top View Side View BLOCK DIAGRAM MAIN POWER INPUT POWER SUPPLY DSQC 661 AND 662 EMERGENCY STOP RUN CHAIN OPERATING SAFETY STOP POWER UNIT RUN CHAIN EXT OPERATING MODE SELECTOR, 2MODES FPU, FLEXPENDANT Main Computer/AnybusCC/RS232 Exp./Interface Board/ MAIN COMPUTER A31 DSQC1000 MAIN COMPUTER A31 DSQC1000 ; A32 DSQC1003 FIELDBUS ADAPTER A32: DEVICENET A31.2 m/s DSQC1006 DIGITAL I/O UNIT INPUT DIGITAL I/O UNIT OUTPUT DIGITAL PART OF COMBI I/O AND DIGITAL I/O UNIT DSQC652 COMBI I/O UNIT DSQC651 RELAY I/O UNIT DSQC653 RELAY I/O UNIT DSQC653 REMOTE I/O UNIT DSQC350A Page supplementary field Date 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014
太阳能小车(追光机器人)

• • • •
•
• : 1)太阳能电池板给电容充电,电容两端的电压不断上升; 2)当电路电压达到LED二极管的导通电压(2V左右)时,LED二极管导通; 3)三极管9012的基极从导通的LED二极管获得足够的导通电压,则三极管 9012导通; 4)三极管9012导通后,又使三极管9014的基极获得足够的导通电压,则三极 管9014导通; 5)三极管9014导通后,电机获得电流开始转动; 6)电机转动,消耗电容中存储的电能,电路电压下降; 7)当电路电压下降到低于LED二极管的导通电压时,LED二极管截止; 8)虽然三极管9012的基极失去了来自LED的导通电压,但是由于此时三极管 9014已经导通,导通后的电流除了提供给电机转动之外,还通过电阻分流了 一部分重新回到三极管9012的基极(形成一个循环),即三极管的基极还是 有足够的导通电压; 9)当电机继续转动消耗电容的电能时,电路电压进一步下降,则即便三极管 9014导通后回流给三极管9012基极的电压也无法保证三极管9012继续导通 (循环被破坏),则两个三极管都截止,电机停止转动; 10)电容重新充电,继续重复上面的各环节。
• 在两块太阳能电池板的 正负极分别焊接上两根 导线,在4排电容上面 贴上双面胶,将太阳能 电池板粘贴在双面胶上, 而焊接在两块太阳能电 池板正负极的根导线通 过面包板上的孔穿到面 包板的另一侧。
至此,太阳能车的控制电路就做好了。
下一步将电机和轮子安装在一起, 将矿泉水瓶盖按下图所示打两个孔。
顺光前进
逆光前进
另外,我们可以自行设计两块太阳能电池板的安装姿态, 以实现多种多样的小车运动方式,大家可以自己设计太 阳能电池板的安装方式以及小车的结构,看看哪种方式 小车可以实现最佳的直线速度和巡光的效果(光源位置 改变)。
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)课程设计
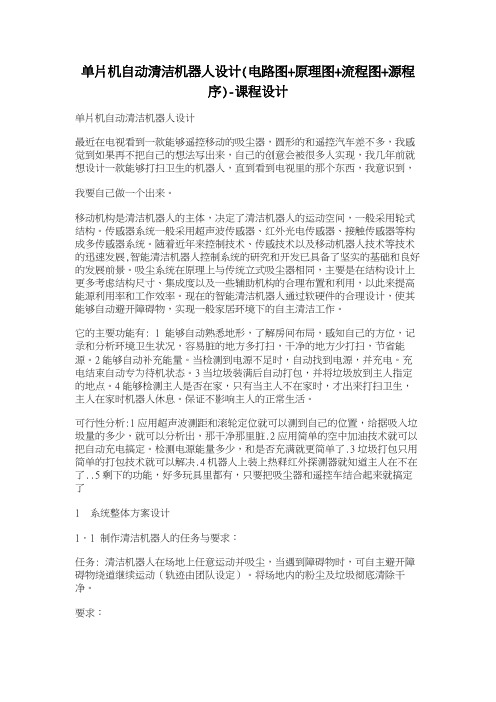
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)-课程设计单片机自动清洁机器人设计最近在电视看到一款能够遥控移动的吸尘器,圆形的和遥控汽车差不多,我感觉到如果再不把自己的想法写出来,自己的创意会被很多人实现,我几年前就想设计一款能够打扫卫生的机器人,直到看到电视里的那个东西,我意识到,我要自己做一个出来。
移动机构是清洁机器人的主体,决定了清洁机器人的运动空间,一般采用轮式结构。
传感器系统一般采用超声波传感器、红外光电传感器、接触传感器等构成多传感器系统。
随着近年来控制技术、传感技术以及移动机器人技术等技术的迅速发展,智能清洁机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。
吸尘系统在原理上与传统立式吸尘器相同,主要是在结构设计上更多考虑结构尺寸、集成度以及一些辅助机构的合理布置和利用,以此来提高能源利用率和工作效率。
现在的智能清洁机器人通过软硬件的合理设计,使其能够自动避开障碍物,实现一般家居环境下的自主清洁工作。
它的主要功能有: 1 能够自动熟悉地形,了解房间布局,感知自己的方位,记录和分析环境卫生状况,容易脏的地方多打扫,干净的地方少打扫,节省能源。
2能够自动补充能量。
当检测到电源不足时,自动找到电源,并充电。
充电结束自动专为待机状态。
3当垃圾装满后自动打包,并将垃圾放到主人指定的地点。
4能够检测主人是否在家,只有当主人不在家时,才出来打扫卫生,主人在家时机器人休息。
保证不影响主人的正常生活。
可行性分析:1应用超声波测距和滚轮定位就可以测到自己的位置,给据吸入垃圾量的多少,就可以分析出,那干净那里脏.2应用简单的空中加油技术就可以把自动充电搞定。
检测电源能量多少,和是否充满就更简单了.3垃圾打包只用简单的打包技术就可以解决.4机器人上装上热释红外探测器就知道主人在不在了..5剩下的功能,好多玩具里都有,只要把吸尘器和遥控车结合起来就搞定了1 系统整体方案设计1.1 制作清洁机器人的任务与要求:任务: 清洁机器人在场地上任意运动并吸尘,当遇到障碍物时,可自主避开障碍物绕道继续运动(轨迹由团队设定)。
机器人现场编程-川崎机器人IO信号的连接19页PPT

2. 外部马达电源ON 1)使用“外部马达电源 ON”时的连接 短接 1TR 板端子块连接器 X9 的引脚 5-6,开启马达电源至 ON。在连
接器 X9 上的引脚 5和 6 之间连接一个开关或继电器触点。须使用脉冲信号, 不允许一直闭合。
2)不使用“外部马达电源 ON”时的连接 断开 1TR 板端子块连接器 X9 的引脚 5-6,在这两个引脚之间不连任
4. 外部暂停 1)使用“外部保持” 将 1TR 板端子块连接器 X9 的引脚 7-8 上的跳接线去除,按下图连接
外部暂停触点。此触点开路时,机器人将暂停。
2)不使用“外部暂停” 在 1TR 板的端子块连接器 X9 连接器上,将引脚 7-8 跳接。
5. 示教/再现(硬件输出信号) 此信号从 1TR 板端子块连接器 X8 的引脚 9-10 上输出。
三、课程预告
川崎工业机器人I/O信号的应用实例
The End!
谢谢
图所示连接安全围栏的开关触点。
2)不使用“安全围栏输入”时的连接 将1TR 板的端子块连接器 X8 的引脚 1-2,3-4跳线。
(3)外部触发开关输入(仅在示教模式下有效) 1)使用“外部触发开关输入”(使用2 个安全回路)
2)不使用“外部触发开关输入” 将 1TR 板端子块连接器 X8 的引脚 5-6 和 7-8 跳接。
一、I/O信号的连接
川崎RS10L工业机器人的硬件专用信号连接
到E20控制器的1TR 板的端子块上(X7、
X8、X9连接器)。
川崎RS10L工业机器人的通用信号(包括软 件专用信号)连接到E20的由控制器中的
1TW 板处的连接器上(CN2、CN4连
接头)。
E20控制器内部结构
一、I/O信号的连接-硬件专用信号的连接
机器人行走设计电路设计讲解
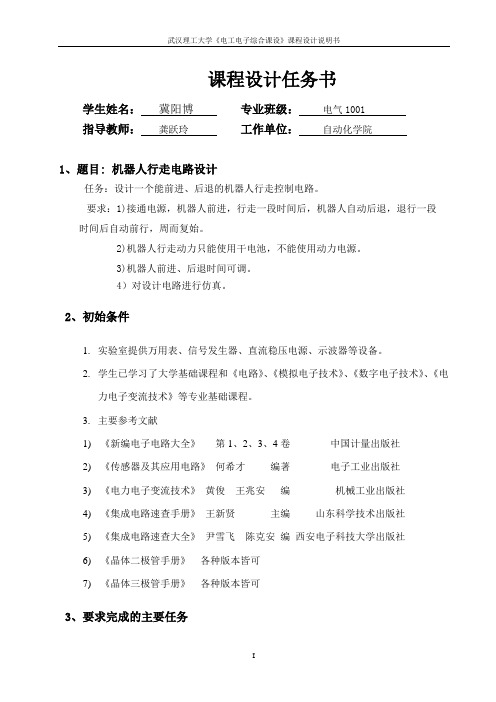
课程设计任务书学生姓名:冀阳博专业班级:电气1001指导教师:龚跃玲工作单位:自动化学院1、题目: 机器人行走电路设计任务:设计一个能前进、后退的机器人行走控制电路。
要求:1)接通电源,机器人前进,行走一段时间后,机器人自动后退,退行一段时间后自动前行,周而复始。
2)机器人行走动力只能使用干电池,不能使用动力电源。
3)机器人前进、后退时间可调。
4)对设计电路进行仿真。
2、初始条件1.实验室提供万用表、信号发生器、直流稳压电源、示波器等设备。
2.学生已学习了大学基础课程和《电路》、《模拟电子技术》、《数字电子技术》、《电力电子变流技术》等专业基础课程。
3.主要参考文献1)《新编电子电路大全》第1、2、3、4卷中国计量出版社2)《传感器及其应用电路》何希才编著电子工业出版社3)《电力电子变流技术》黄俊王兆安编机械工业出版社4)《集成电路速查手册》王新贤主编山东科学技术出版社5)《集成电路速查大全》尹雪飞陈克安编西安电子科技大学出版社6)《晶体二极管手册》各种版本皆可7)《晶体三极管手册》各种版本皆可3、要求完成的主要任务1.课程设计结束时每个学生要交一份按统一格式要求撰写的课程设计说明书,并装订成册。
2.课程设计说明书中每个题目要求有方案比较、绘制方框图、电原理图,阐述电路工作原理、每个元器件的主要参数、设计电路的性能指标及电路仿真效果图等。
3.说明书中除个人签名外,其它文字、符号、图形或表格一律用计算机打印。
4.文字、符号、图形等必须符合国家标准。
5.独立完成设计任务,严禁相互抄袭。
4、时间安排设计时间为二周(6月25日—7月6日),安排如下:1.6月25日上午,指导教师讲授课程设计的有关基本知识等。
2.6月25日下午——7月1日学生查阅资料,完成初步设计。
3.7月2日——7月3日检查设计进度,答疑、质疑。
4.7月4日——7月5日完善设计,形成设计说明书电子文档。
4.7月5日——7月6日课程设计打印、装订、提交。
电机正反转控制电路图

CREATE TOGETHER
DOCS
谢谢观看
THANK YOU FOR WATCHING
• 原理:通过接触器的吸合与断开来改变电机的电源极性 • 优点:电路简单,成本低,适用于大功率电机 • 缺点:控制方式较为简单,无法实现复杂的控制功能
案例二:微型计算机控制的电机正反转电路
• 原理:通过微型计算机发出的控制信号来改变电机的电源极性 • 优点:控制功能强大,可以实现复杂的控制算法,适用于高精度、高 速度的控制系统 • 缺点:成本较高,对计算机性能有一定要求
• 元器件选型:选择正品元器件,保证 电路的性能和可靠性 • 电路设计:电路结构简洁明了,易于 调试和维护 • 安全防护:采取适当的安全保护措施, 防止电气事故的发生
04
电机正反转控制电路图的仿真与调试
电机正反转控制电路 图的仿真软件选择与 设置
• 仿真软件选择:常用的电机正反转控制电路仿真软件有 MATL AB/Simulink、LabVIEW等
电机正反转控制电路图中的元器件选择与参数计算
元器件选择:
• 电源电路:选择合适的电源变压器、整流器等元件 • 控制电路:选择合适的继电器、接触器、微控制器等元件 • 电机电路:选择合适的电机、电刷、换向器等元件
参数计算:
• 电源电路:根据电路结构和元器件参数计算电源电压和电流 • 控制电路:根据控制方式和元器件参数计算控制信号的电压和频率 • 电机电路:根据电机类型和性能要求计算电机的电压、电流、转速等参数
电机正反转控制电路图的拓展功能与技术创新
拓展功能:
• 多电机控制:实现多个电机的正反转控制,提高系统的复杂度和性能 • 遥控控制:通过无线遥控实现电机的正反转控制,提高操作便利性 • 传感器融合:结合传感器技术实现电机的自适应控制和智能控制
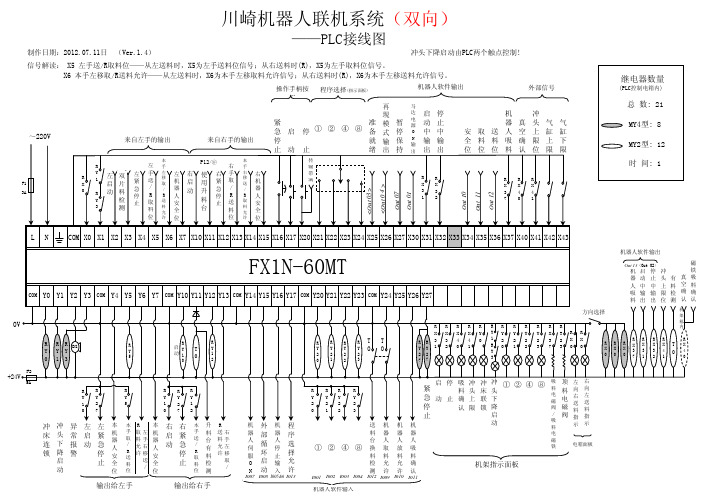
川崎机器人联机系统-PLC控制电路图
右 向 左 送 料 指 示
电箱面板
① ② ④ ⑧
机架指示面板
I007 I008 I005&6 I013
I001 I002 I003 I004 I012 I009 I010 I011
输出给左手
输出给右手
机器人软件输入
机器人软件输出
Out 13 <Out 02>
Out 11
Out 12
R X 0
R Y 1
左 双 启 片 动 料 检 测
左 紧 急 停 止
左 手 送 / R 取 料 位
本 手 左 移 取 / R 送 料 允 许
P12/⑧ 左 机 器 人 安 全 位
右 启 动
使 用 升 料 台
右 紧 急 停 止
右 手 取 / R 送 料 位
继电器数量
机器人软件输出 操作手柄按 钮 程序选择(指示面板) 外部信号
(PLC控制电箱内)
~220V
来自左手的输出 来自右手的输出
紧 急 启 停 止 动
① ② ④ ⑧ 停 止
传 输 带 满
准 备 就 绪
再 现 模 式 输 出
暂 停 保 持
马 达 电 源 O N 输 出
总 数: 21
启 动 中 输 出 停 止 中 输 出 机 器 安 取 送 人 全 料 料 吸 位 位 位 料 真 空 确 认 冲 头 上 限 位 气 缸 上 限 气 缸 下 限
MY4型: 8 MY2型: 12 时 间: 1
F1 3A
<Out 03>
<Out 04>
Out 07
Out 01
Out 10
R Y 3
L
N
COM X0 X1 X2 X3 X4 X5 X6 X7 X10 X11 X12 X13 X14 X15 X16 X17 X20 X21 X22 X23 X24 X25 X26 X27 X30 X31 X32 X33 X34 X35 X36 X37 X40 X41 X42 X43
ER16机器人电气维护手册

J6 轴伺服电机驱动器电路图:
埃斯顿机器人工程有限公司
4.3 主控制器单元
通过对该单元进行编程,实现机器人本体及其外围设备的动作,以及安全防护、故障报 警、紧急停止等功能。该控制器一共可以扩展 12 模块,包括数字量输入输出模块,模拟量 输入输出模块,通讯模块等等。
主 CPU
版本号:V1.0
ER16机器人 电气维护手册
第一版
●在使用机器人之前,请详读本操作说明书,并请遵从所有关于安全事项与正文的指示。 ●关于本机器人的安装、操作、维修,请仅有接受过本公司机器人培训的人员进行。 ●在使用本机器人的时候,必须遵守各个国家有关工业机器人的法律以及安全相关的法律条例。 ●务必将本操作说明书交付给实际操作的人员。 ●有关本操作说明书的不明之处以及有关本机器人的售后服务,请向记载在封底中的公司的服务部查询。
J1 轴,J2 轴,J3 轴选择的制动电阻为 300W/50Ω,J4,J5,J6 轴选择的制动电阻为 50W/25 Ω。
具体电路图,如下所示: J1 轴伺服电机驱动器电路图:
埃斯顿机器人工程有限公司
J2 轴伺服电机驱动器电路图: J3 轴伺服电机驱动器电路图:
埃斯顿机器人工程有限公司
J4 轴伺服电机驱动器电路图: J5 轴伺服电机驱动器电路图:
埃斯顿机器人工程有限公司
目录
第一章 控制柜概述.................................................................................................................4 1.1 控制柜外观................................................................................................................4 1.2 控制柜面板................................................................................................................5
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Document no.
Rev. Ind Page 1
3HAC049406-003
02
Next 2 Total 52
1
2
3
4
5
6
7
8
We reserve all rights in this document and in the information contained therein.Reproduction, use or disclosure to third parties without express authority is strictly forbidden. © Copyright 2003 ABB
The information in this document is subject to change without notice and should not be construed as a commitment by ABB. ABB assumes no responsibility for any errors that may appear in this document.
7 Top View
8 Side View
9 BLOCK DIAGRAM
10 MAIN POWER INPUT
11 POWER SUPPLY DSQC 661 AND 662
12 SAFETY INPUT & OUTPUT
13 RUN CHAIN OPERATING MODE SELECTOR, 2 MODES 14 PROTECTIVE STOP 15 POWER UNIT SERVO DISCONNECTOR
:
Project start
:
Project manager
:
Last revision
:
Designed by
:
Designed date
:
Number of pages
:
:
Latest revision:
Prepared by, date: CNSHLIN8
Approved by, date:
Lab/Office:
TITLE PAGE
Status:
Plant:
=
Approved
Location: + Sublocation:+
Document no.
Rev. Ind Page 2
3HAC049406-003
02
Next 3 Total 52
We reserve all rights in this document and in the information contained therein.Reproduction, use or disclosure to third parties without express authority is strictly forbidden. © Copyright 2003 ABB
Customer
:
:
Drawing number
:
Drawing version
:
Manufacture
:
Type
:
Type of installation
:
Control cabinet
:Hale Waihona Puke Mains voltage
:
Supply
:
Control voltage
:
Year of construction
Nanhui District, Shanghai, 201319 P.R.China
Latest revision:
Prepared by, date: CNSHLIN8
Approved by, date:
Lab/Office:
COPYRIGHT
Status:
Plant:
=
Approved
Location: + Sublocation:+
Additional copies of this document may be obtained from ABB at its then current charge.
© Copyright 2016 ABB ALL right reserved.
ABB Engineering (Shanghai) No.4528, Kangxin Highway, Kangqiao Town
1
2
3
4
5
Table of contents
Plant
Location
Page Page description
1 COPYRIGHT
2 TITLE PAGE
3 Table of contents:
4 Table of contents:
5 REVISION INFORMATION
6 Front View
Except as may be expressly stated anywhere in this document, nothing herein shall be construed as any kind of guarantee or warranty by ABB for losses, damages to persons or property, fitness for a specific purpose or the like.
1
2
3
4
5
6
7
8
We reserve all rights in this document and in the information contained therein.Reproduction, use or disclosure to third parties without express authority is strictly forbidden. © Copyright 2003 ABB
In no event shall ABB be liable for incidental or consequential damages arising from use of this document.
This document and parts thereof must not be reproduced or copied without ABB's written permission, and contents therof must not be imparted to a third party nor be used for any unauthorized purpose. Contravention will be prosecuted.