5系统函数及系统特性分析.docx
系统函数与系统特性

例:试判断离散因果LTI系统
H(z)
(1
0.5z
1
1 )(1
1.5z
1
)
稳定性。
解:(1) 从收敛域角度分析
该离散LTI系统的收敛域为|z|>1.5 收敛域不包含单位圆,故系统不稳定。
(2) 从极点分布分析
该因果LTI系统的极点为z1=0.5, z2=1.5 极点z2=1.5在单位圆外,故系统不稳定。
主讲人:陈后金
电子信息工程学院
系统函数与系统特性
系统函数与系统时域特性 系统函数与系统频域特性 系统函数与系统的稳定性
1. 系统函数与系统时域特性
※ 系统函数H(z)的零极点分布:
H (z) N (z) K (z z1)(z z2)(z zm) D(z) (z p1)(z p2 )(z pn )
例:某离散因果LTI系统如图所示,求系统函数H(z),并判断
系统稳定时β的取值范围。 x[k]
g[k ] y[k ]
z1 3 4
解:引入中间变量g[k],
G(z) z1( / 3)G(z) X (z)
G(
z
)
1
X
(
(z) / 3)
z
1
将G(z)代入并整理: Yzs (z) G(z) ( / 4)z1G(z)
H (e jW ) H ( z) zejΩ
H (ejW ) | H (ejW ) | ej(W )
幅度响应
相位响应
2. 系统函数与系统频率响应
离散LTI系统的频率响应H(ejW)
m
(z zj)
对于零极增益表示的系统函数 H (z) K
第七章系统函数

∏ ∏
i =1 j =1 n
m
(s − z j ) ( s − pi )
(7―2)
把系统函数的零点与极点表示在s平面上的图形, 把系统函数的零点与极点表示在s平面上的图形, 叫做系统函数的零、 极点图。 其中零点用“ 叫做系统函数的零 、 极点图 。 其中零点用 “ o” 表示 。 表示。 极 点 用 “ ×” 表 示 。 若 为 n 重 极 点 或 零 点 , 则 注 以 ( n) 。 例如某系统的系统函数为
H ( s) = H 0
∏ ∏
i =1 m j =1 n
m
(s − z j ) (s − p j ) ( jω − z j ) ( jω − p j )
H ( jω ) = H 0
∏ ∏
i =1 j =1 n
(7―8)
图7.3中画出了由零点zj和极点pi与虚轴上某点jω连接 中画出了由零点z 和极点p 与虚轴上某点jω jω连接 构成的零点矢量jω 和极点矢量jω 构成的零点矢量jω-zj和极点矢量jω-pi。图中Nj、Mi分别 jωjω图中N 表示矢量的模,θ 表示矢量的模,θj、φi分别表示矢量的相角,即 分别表示矢量的相角,
当正弦激励信号的频率ω 改变时, 当正弦激励信号的频率 ω 改变时 , 稳态响应的幅度和相 位将分别随着H jω) 位将分别随着 H ( jω ) 和 φ ( ω ) 变化 ,H ( jω ) 反映了 变化,H jω) ,H( 系统在正弦激励下稳态响应随频率变化的情况, 系统在正弦激励下稳态响应随频率变化的情况 , 故又称系统 的频响特性。 的频响特性。 若 H ( s ) 的极点均位于 s 左半平面 , 令 s=jω, 也就是在 s 的极点均位于s 左半平面, s=jω,也就是在 也就是在s 平面上令s沿虚轴变化,则有H(s)|s=jω=H(jω), 平面上令s沿虚轴变化,则有H(s)|s=jω=H(jω),即为系统的 H(s)|s=jω=H(jω),即为系统的 频响特性。根据H 频响特性。根据H(s)在s平面的零、极点分布情况可以绘 平面的零、 制出频响特性曲线,包括幅频特性|H(jω)| 制出频响特性曲线 , 包括幅频特性 |H(jω)| 曲线和相频特性 |H(jω)|曲线和相频特性 φ(ω)曲线 下面介绍这种方法。 φ(ω)曲线,下面介绍这种方法。 曲线, 由式( 由式(7―2),系统函数H(s)的表示式为 系统函数H
系统函数
Ak(1)k (k)
不在实轴上:
z
Az e
j
z
Az ej
2 | A | cos(k )(k)
(z
Az e j)2
(z
Az ej)2
2
|
A|
k
cos[(k
1)
](k )
第第44--1100页页
■
©西安电子科技大学电路与系统教研中心
信号与系统 电电子子教教案案 (3)单位圆外的极点:
2
0
0
第第44--1188页页
■
©西安电子科技大学电路与系统教研中心
信号与系统 电电子子教教案案
7.1 系统函数与系统特性
2、离散系统H(z)与系统频率响应:
设H(z)的收敛域包含单位圆,对因果系统,H(z) 的极点全部在单位圆内,则系统的频率响应为:
H (e jT ) H (z) |zejT
i 1
Ai
e
ji
第第44--1199页页
■
©西安电子科技大学电路与系统教研中心
信号与系统 电电子子教教案案
7.1 系统函数与系统特性
| H (e jT ) |bmB1B2 Bm A1 A2 An
(T ) (1 2 m ) (1 2 n )
例:H (z) z 1 , | z |1 , 画出系统幅频响应曲线。
7.1 系统函数与系统特性
在实轴上:
Az Aak(k ), | a |1 z a
(z
Az a)2
Akak1(k )
不在实轴上:
z
Az e
j
z
Az ej
系统函数与系统特性

系统频率响应:
H (ej )
ej
ej
1
(1 cos )
j sin
幅度响应
H (ej )
1
(ej)| 1
()
1 2 2 cos 1
相位响应
1
1
( )统特性
谢谢
本课程所引用的一些素材为主讲老师多年的教学积累,来源 于多种媒体及同事、同行、朋友的交流,难以一一注明出处,特 此说明并表示感谢!
z z
( (
/ 4) / 3)
极点: p 3
离散因果LTI系统稳定的条件是H(z)的极点位于单位圆内,
因此,β的取值范围: 3
例:描述因果离散LTI系统的差分方程为y[k] y[k1]=x[k], 试分析使得系统稳定的参数 取值范围,并求解系统单位脉
冲响应h[k]和系统频率响应H(ejΩ) 。
1. 系统函数与系统时域特性
H(z)零极点分布与系统时域特性
k
k
1
k
k Im(z)
k
j
1
Re( z )
j k
k
k
k
2. 系统函数与系统频率响应
离散LTI系统的频率响应H(ej) 对于稳定系统,令系统函数H(z)中z=ej 得到系统频率响应
H (ej ) H (z) zejΩ
H (ej ) | H (ej ) | ej ( )
( )
H(ej )
Im(z)
单位圆
D1
1
p1
D2
p2
ej
1
N1z1 N2
Re(z)
2
z2
3. 系统函数与系统的稳定性
5.系统函数及系统特性分析
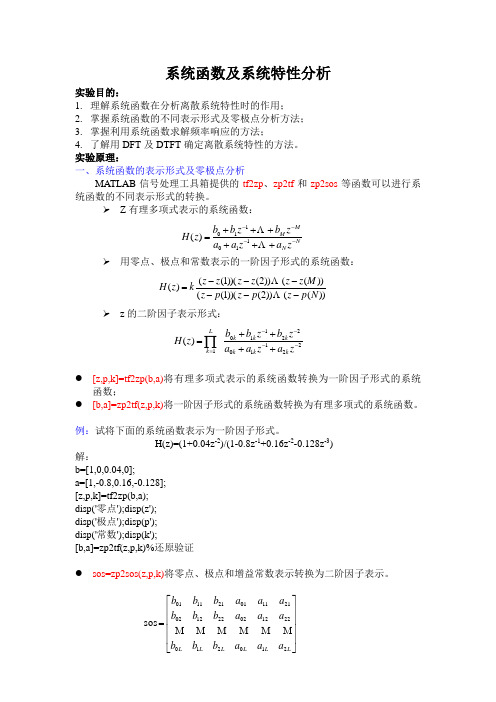
系统函数及系统特性分析实验目的:1. 理解系统函数在分析离散系统特性时的作用;2. 掌握系统函数的不同表示形式及零极点分析方法;3. 掌握利用系统函数求解频率响应的方法;4. 了解用DFT 及DTFT 确定离散系统特性的方法。
实验原理:一、系统函数的表示形式及零极点分析MATLAB 信号处理工具箱提供的tf2zp 、zp2tf 和zp2sos 等函数可以进行系统函数的不同表示形式的转换。
Z 有理多项式表示的系统函数:用零点、极点和常数表示的一阶因子形式的系统函数:z 的二阶因子表示形式:● [z,p,k]=tf2zp(b,a)将有理多项式表示的系统函数转换为一阶因子形式的系统函数;● [b,a]=zp2tf(z,p,k)将一阶因子形式的系统函数转换为有理多项式的系统函数。
例:试将下面的系统函数表示为一阶因子形式。
H(z)=(1+0.04z -2)/(1-0.8z -1+0.16z -2-0.128z -3)解:b=[1,0,0.04,0];a=[1,-0.8,0.16,-0.128];[z,p,k]=tf2zp(b,a);disp('零点');disp(z');disp('极点');disp(p');disp('常数');disp(k');[b,a]=zp2tf(z,p,k)%还原验证● sos=zp2sos(z,p,k)将零点、极点和增益常数表示转换为二阶因子表示。
N N M M z a z a a z b z b b z H ----++++++= 110110)())(())2())(1(())(())2())(1(()(N p z p z p z M z z z z z z k z H ------= 22110221101)(----=++++=∏z a z a a z b z b b z H k k k k k k L k ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=L L L L LL a a a b b b a a a b b b a a a b b b 210210221202221202211101211101sos例:求下面系统函数的零极点形式二阶因子形式。
系统函数与频率响应特性

=
−
s2 s2
+ 2s +1 + 5s + 2
例 5 – 3 图 5 – 3(a)是常用的分压电路(也称为衰减器),若以电容 C2 上的电压为输 出,试求其冲激响应。
解
画出图 5 – 3(a)的 s 域模型(零状态)如图 5 – 3(b)所示。如令
C1
1 sC1
+
x(t)
-
R1
+
R2 C2 y(t)
条件下,对于任何输入信号 x(t) ,图 5 – 3(a)电路的零状态响应为
y(t) = h(t) * x(t) = R2 δ (t) ∗ x(t) = R2 x(t)
R1 + R2
R1 + R2
即该网络的输出信号 y(t) 与输入信号 x(t) 波形相同,而为输入信号的 R2 倍,不产生失真。 R1 + R2
其系统函数为
1
H (s)
=
I (s) X (s)
=
R
1 + sL
=
s
L +R
L
(5-5)
在网络分析中,由于激励与响应既可以是电压,也可能是电流,因此网络函数可以是阻抗
204
(电压比电流),或为导纳(电流比电压),也可以是数值比(电流比或电压比)。此外,若激
励与响应是同一端口,则网络函数叫做“策动点函数(driving function)”或“驱动点函数”,如 图 5 – l(a)中的 Vi (s) 与 Ii (s) ;若激励与响应不在同一端口,就叫做“转移函数(transfer function)”或“传输函数”,如图 5 – 1(b)中的Vi (s) [或 Ii (s) ]与Vj (s) [或 I j (s) ]。显然,策动
系统特性分析报告

系统特性分析报告1. 引言本报告旨在对系统的特性进行分析,以便全面了解系统的功能和性能。
通过深入分析系统的特性,我们可以更好地理解其优点和局限性,并为系统的优化和改进提供有效的参考。
2. 系统背景在开始分析系统特性之前,我们先来了解一下系统的背景和基本信息。
系统是一个基于云技术的在线协作平台,旨在提供用户友好的界面和强大的功能,以满足用户的协作和信息管理需求。
3. 功能特性分析3.1 用户管理系统支持多种用户角色,如管理员、普通用户等。
管理员可以管理用户账户、分配权限和监控系统的使用情况。
普通用户可以注册账号、登录系统,并根据权限执行相应的操作。
3.2 文件管理系统提供了便捷的文件管理功能,用户可以上传、下载和分享文件。
同时,系统支持文件版本控制,用户可以方便地回滚到历史版本,以及查看文件的修改记录。
3.3 任务管理系统具备强大的任务管理功能,用户可以创建、分配和追踪任务。
系统支持任务优先级、截止日期和提醒功能,以确保任务的及时完成。
3.4 日程管理系统提供了日程管理功能,用户可以创建、编辑和共享日程安排。
用户可以方便地查看日程表,设定提醒,以及与他人协作安排会议和活动。
3.5 团队协作系统支持团队协作,用户可以创建团队并邀请其他成员加入。
团队成员可以共享文件、任务和日程,并通过系统内部消息系统进行即时沟通。
4. 性能特性分析4.1 响应速度系统具备快速响应的特性,用户在进行操作时,系统能够迅速响应并提供及时的反馈。
用户无需长时间等待,能够高效地完成任务。
4.2 可扩展性系统具备良好的可扩展性,能够应对用户数量和数据量的增长。
系统采用分布式架构和云技术,可以灵活地扩展服务器资源,以满足用户的需求。
4.3 安全性系统采取了多种安全措施,以保护用户的数据不被未授权访问和篡改。
系统支持用户身份验证、数据加密和访问控制,能够有效地防止信息泄露和攻击行为。
5. 局限性和改进方向5.1 局限性系统目前还存在一些局限性,例如界面设计可能不够直观、系统容量限制和某些功能还不够完善等。
系统函数与系统特性

j
a
j
a-b
|a-b|
b
b
0
0
j
系统函数零极点的向量表示
j
Di
( j pi ) Die ji pi
i
0
Nj
(j z j ) N je j j
j
zj
例:已知系统函数 H(s) 1 ,求系统的频率响应。
s 1
解:
H(j) 0
H ( j)
1 1 D0
H(s)
sj
1
j 1
(j)
0 0 0 0
所以该因果LTI系统不稳定。
综合题:已知某连续时间LTI系统的零状态响应 yzs (t) (0.5 et 1.5e2t )u(t) ,激励信号x(t)=u(t), 试求该系统的系统函数H(s)并画出零极点分布图, 写出描述系统的微分方程、系统的冲激响应h(t)、 并判断系统是否因果、稳定。
解:零状态响应和激励信号的拉氏变换分别为
H(j) 1 1
1 D1 2
H(j) 1 0
D
j
H ( j)
1
ja
0.8
(j) 1 0 1 arctan1 45
(j) 0 0 90
(j)
0
5
10
Db D1 j1
(1)
-1
0
0.6
0.4
0.2
-90o
01
5
10
3. 系统函数与系统的稳定性
※ 连续时间LTI系统稳定的充要条件:
系统函数H(s)的收敛域(ROC)包含s平面j轴。
包含s平面j轴。
例:判断下述因果连续LTI系统是否稳定。
(1)H1(s)
(s
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统函数及系统特性分析
实验目的:
1. 理解系统函数在分析离散系统特性吋的作用;
2. 掌握系统函数的不同表示形式及零极点分析方法;
3. 掌握利用系统函数求解频率响应的方法;
4. 了解用DFT 及DTFT 确定离散系统特性的方法。
实验原理:
一、系统函数的表示形式及零极点分析
MATLAB 信号处理工具箱提供的tf2zp 、zp2tf 和zp2sos 等函数可以进行系 统函
数的不同表示形式的转换。
> Z 有理多项式表示的系统函数: H(z) = 4+处:+…+ 加:
+ Q] Z + …+ Cl” Z '
>用零点、极点和常数表示的一阶因子形式的系统函数:
二 k (z-z(l))(z — z(2))・・・(z-z(M))
(z-p(l))(z — p(2))・・・(z — ”(N))
> Z 的二阶因子表示形式:
•
[z,p,k]=tQzp(b,a)将有理多项式表示的系统函数转换为一阶因子形式的系统 函数; • [b,a]=zp2tf(z,p,k)将一阶因子形式的系统函数转换为有理多项式的系统函数。
例:试将下面的系统函数表示为一阶因子形式。
H ⑵=(1+0.04Z -2)/(1-0.8Z 1+0.16Z 2-0.128Z 3)
解:
b=[l,0,0.04,0];
a=[l,-0.8,0.16,-0.128];
[z,p,k]=tf2zp(b,a);
dispC 零点);disp(z);
dispC 极点');disp(p');
dispC 常数);disp(k f );
[b,a]=zp2tf(z,p,k)% 还原验证
• sos=zp2sos(z,p,k)将零点、极点和增益常数表示转换为二阶因子表示。
例:求下面系统函数的零极点形式二阶因子形式。
s、Z3+0.04Z
H(z)=— ---------- ;------------------
」6Z-0」28
Z3-0.8Z2+0
解:
b=[l 0 0.04 0];
a=[l -0.8 0.16 ・ 0.128];
[z,p,k]=tf2zp(b,a); disp(*Zeros are at'); disp(z); disp('Poles are at'); disp(p);
disp('Gain constanf);disp(k);
sos=zp2sos(z,p,k); disp('Second-order sections');
disp(sos);
MATLAB提供roots函数可用来计算离散系统的零极点,以及zplane函数可绘制离散系统的零极点分布图。
在利用这些函数时,要求H(z)的分子多项式和分母多项式的系数的个数相等,若不等则需要补零。
例:己知系统函数为H⑵=(l+2z-1)/(l+0.4z,-0.12z-2),计算该系统函数的零极点, 并画岀系统函数零极点分布图。
b=[l,2,0];
a=[l,0.4,-0.12];
z=roots(b)
p=roots(a) zplane(b.a)
二、离散系统的频率响应
当离散因果LTI系统的系统函数H(z)的极点全部位于Z平面单位圆内吋,系统的频率特性出屮)可由H(z)求出。
> 使用freqz(b,a)可计算系统的频率响应:
[H,w]=freqz(b,a,n)计算系统的n点频率响应H, w为频率点向量(默认取0到兀), b和a 分別为系统函数H⑵的分子分母系数矩阵(即H(z)对应的差分方程左右两边的系数向量)。
H=freqz(b,a,w)计算系统在指定频率点向量w上的频率响应。
freqz(b,a)自动绘制频率响应曲线。
例:已知某离散因果系统的系统函数为H⑵=(1+『)/(1・『+0.5尹),试分析该系统
幅频特性。
绘出系统的频率特性图:
b珂1丄0];
a=[l,-1,0.5];
[H,w]=freqz(b,a); plot(w/pi,abs(H))
xlabel('Frequency(ra(i)'); ylabel(l Magnitude,); titlefMagnitude response1); 或计算系统的32点频率响应: b=[ 1,1,0];
a=[l,-l,0.5];[H,w]=freqz(b,a,32); stem(w/pi,abs(H)) xlabel(f Frequency (rad)1); ylabel(f Magnitude f); title(f Magnitude response1);
三、利用DTFT和DFT确定离散系统的特性
在很多情况下,需要根据LTI离散系统的输入和输出对系统进行辨识,即通过测量系统在已知输入x[k]激励下的响应y[k]來确定系统的特性。
若系统的单位脉冲响应为h[k],由于存在y[k] = x[kyh[k]f所以可以在时域通过信号解卷积方法求解h[k],但在实际应用中,进行信号解卷积比较困难,因此,通常从频域来分析系统,来确定系统的频率响应函数HG。
),再由H(^)得到系统的单位脉冲响应h[k]o
若LTI系统输入x[k]的DTFT为X©。
),系统输出y[k]的DTFT为丫(』°), 则系统的频率响应函数HQ。
)可表示为
X(严)
有限长序列的DTFT可以利用FFT计算岀其在区间Q w [0,2龙)内的等间隔频率点上的样本值。
即利用fft(x,N)就可以计算出xeB在£1“0,2龙)区间内N个频率点#唏(“0,1,…,心)上的样点值X[m],利用附,N)就可以计算出丫@°)在Qw[0,2;r)区间内N个频率点Q”严加2(税=0,1,・・・,“-1)上的样点值N
Y[m],从而可以得到H(』°)在这些频率点上的样点值= 利用函数
X[m]
ifft(H)就可以得到系统的单位脉冲响应h[k]o
实验内容:
1.已知因果离散系统的系统函数为
z? + 2z +1
H(z) = ----- -------------- z ------ 5
Z3-0.5Z2-0.005Z_2+0.3
讣算该系统函数的零极点,并画出系统函数零极点分布图,在报告中记录下零极
点数据,并依据分布图判断系统的稳定性。
2. 已知离散系统的系统函数为
将其表示为一阶因子形式,在报告中记录下零极点数据及一阶因子形式表达式;
3. 已知离散系统的系统函数为
试将其表示为二阶因子形式,依据结果在报告中写岀其二阶因子形式的表达式;
4. 已知离散系统的系统函数为
l + l z -«+l z -2_l z -3
6 3 6
试绘出该系统的频率响应曲线;
5. 已知离散系统的系统函数为
(0.5009 — 1.0019z _1 + 0.5009Z -2 )(0.5320 + 1.0640z _1 +
0.5320z -2)
Z ~ (1-0.8519Z -1 +0.4167z -2)(l + 0.8519z-1 +0.4167z~2)
试绘出该系统的频率响应曲线,并在报告中记录下其有理多项式的表示形式;
6. 某离散系统的输入和输岀序列分别为:
输入序列:
x=[2,0.8333,0.3611,0」62,0.0748,0.0354,0.017,0.0083,0.0041,0.002,0.001,0.0005,0.0002,0.0001, 0.0001];
输出系列:
y=[0.0056,-0.0259,0.073,-0.1593,0.297,-0.4974,0.7711,-1.1267,1.5702,-2.1037,2.724,・3.4207,4.1 74,49528,5.7117,・6.3889,6.9034,・7.1528,7.012,・6.3322,4.9416,2648,-0.7564,5.4872,-11.7557,1
9.7533,-29.6298,41.4666,-55.2433,70.7979,-87.7810];
(1) 利用fft 计算该系统的频率特性H(^),并绘制其幅频特性曲线;
(2) 利用ifft 计算该系统的单位脉冲响应h[k],并绘制岀其波形图。
(3) 利用上一问中求得的h[k]来计算觅可二兀[幻*灿幻,比较计算出的y[k]与题
目已知条件中给定的y[k]是否一•致。
实验报告要求:
1•列岀本次实验编写的所有MATLAB 程序及各项实验结果数据、图形(打印), 对实验结果进行必要的分析说明;
H(z) = 1 l-z _i +0.49z-2-0.1z -3
2.总结实验体会及实验中存在的问题。