基于ansys的连杆机构的有限元分析
8 有限元分析上机指导书之 ANSYS连杆建模实践
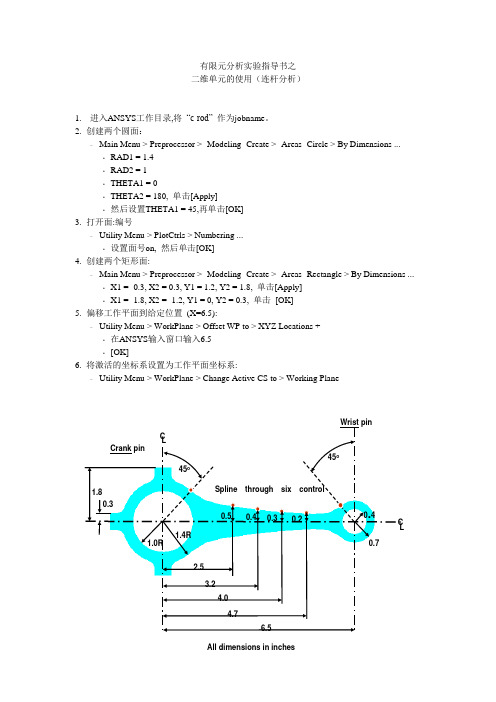
6.52.50.51.8 0.31.0R1.4R0.40.745oSpline through six control C LC LCrank pinWrist pinAll dimensions in inches45o0.20.4 0.34.74.0 3.2有限元分析实验指导书之 二维单元的使用(连杆分析)1. 进入ANSYS 工作目录,将 “c -rod” 作为jobname 。
2. 创建两个圆面:– Main Menu > Preprocessor > -Modeling- Create > -Areas- Circle > By Dimensions ... • RAD1 = 1.4 • RAD2 = 1 • THETA1 = 0• THETA2 = 180, 单击[Apply]• 然后设置THETA1 = 45,再单击[OK]3. 打开面:编号– Utility Menu > PlotCtrls > Numbering ... • 设置面号on, 然后单击[OK]4. 创建两个矩形面:– Main Menu > Preprocessor > -Modeling- Create > -Areas- Rectangle > By Dimensions ... • X1 = -0.3, X2 = 0.3, Y1 = 1.2, Y2 = 1.8, 单击[Apply] • X1 = -1.8, X2 = -1.2, Y1 = 0, Y2 = 0.3, 单击 [OK]5. 偏移工作平面到给定位置 (X=6.5):– Utility Menu > WorkPlane > Offset WP to > XYZ Locations + • 在ANSYS 输入窗口输入6.5 • [OK]6. 将激活的坐标系设置为工作平面坐标系:– Utility Menu > WorkPlane > Change Active CS to > Working Plane7. 创建另两个圆面:–Main Menu > Preprocessor > -Modeling- Create > -Areas- Circle > By Dimensions ...•RAD1 = 0.7•RAD2 = 0.4•THETA1 = 0•THETA2 = 180, 然后单击[Apply]•第二个圆THETA2 = 135, 然后单击[OK]8. 对面组分别执行布尔运算:–Main Menu > Preprocessor > -Modeling- Operate > -Booleans- Overlap > Areas + •首先选择左侧面组, 单击[Apply]•然后选择右侧面组, 单击[OK]9. 将激活的坐标系设置为总体笛卡尔坐标系:–Utility Menu > WorkPlane > Change Active CS to > Global Cartesian10. 定义四个新的关键点:–Main Menu > Preprocessor > -Modeling- Create > Keypoints > In Active CS …•第一个关键点, X=2.5, Y=0.5, 单击[Apply]•第二个关键点, X=3.25, Y=0.4, 单击[Apply]•第三个关键点, X=4, Y=0.33, 单击[Apply]•第四个关键点, X=4.75, Y=0.28, 单击[OK]11. 将激活的坐标系设置为总体柱坐标系:–Utility Menu > WorkPlane > Change Active CS to > Global Cylindrical12. 通过一系列关键点创建多义线:–Main Menu > Preprocessor > -Modeling- Create > -Lines- Splines > With Options > Spline thru KPs +•如图按顺序拾取六个关键点, 然后单击[OK]•XV1 = 1•YV1 = 135•XV6 = 1•YV6 = 45•[OK]13. 在关键点1和18之间创建直线:–Main Menu > Preprocessor > -Modeling- Create > -Lines- Lines > Straight Line + •拾取如图的两个关键点, 然后单击[OK]14. 打开线的编号并画线:–Utility Menu > PlotCtrls > Numbering ...•打开线的编号, 单击[OK]–Utility Menu > Plot > Lines15.由前面定义的线6, 1, 7, 25创建一个新的面:–Main Menu > Preprocessor > -Modeling- Create > -Areas- Arbitrary > By Lines + •拾取四条线(6, 1, 7, and 25),然后单击[OK]16. 放大连杆的左面部分:–Utility Menu > PlotCtrls > P an, Zoom, Rotate …•[Box Zoom]17. 创建三个线倒角:–Main Menu > Preprocessor > -Modeling- Create > -Lines- Line Fillet + •拾取线36 和40,然后单击[Apply]•RAD = .25,然后单击[Apply]•拾取线40 和31, 然后单击[Apply]•[Apply]•拾取线30和39, 然后单击[OK]•[OK]–Utility Menu > Plot > Lines18. 由前面定义的三个线倒角创建新的面:–Main Menu > Preprocessor > -Modeling- Create > -Areas- Arbitrary > By Lines + •拾取线12, 10, 及13, 单击[Apply]•拾取线17, 15, 及19, 单击[Apply]•拾取线23, 21, 及24, 单击[OK]–Utility Menu > Plot > Areas19. 将面加起来形成一个面:–Main Menu > Preprocessor > -Modeling- Operate > Add > Areas + •[Pick All]20. 使模型充满整个图形窗口:–Utility Menu > PlotCtrls > Pan, Zoom, Rotate …•[Fit]21. 关闭线及面的编号:–Utility Menu > PlotCtrls > Numbering ...•关闭线及面的编号, 单击[OK]–Utility Menu > Plot > Areas22. 将激活的坐标系设置为总体笛卡尔坐标系:–Utility Menu > WorkPlane > Change Active CS to > Global Cartesian –Or issue:CSYS,023.将面沿X-Z面进行映射(在Y 方向):–Main Menu > Preprocessor > -Modeling- Reflect > Areas + •[Pick All]•选择X-Z面, 单击[OK]24. 将面加起来形成一个面:–Main Menu > Preprocessor > -Modeling- Operate > Add > Areas + •[Pick All]25. 关闭工作平面:–Utility Menu > WorkPlane > Display Working Plane26. 存储数据库并离开ANSYS:–拾取“SAVE_DB”–拾取“QUIT” 选择“Quit - No Save!”[OK27.选取93号壳单元Main Menu>Preprocessor>Element Type>Add/Edit/Delete>Add>28.设置壳单元厚度为0.3Main Menu>Preprocessor>Real Constants>Add/Edit/Delete>Add>ok29.设置材料参数Main Menu>Preprocessor>Material Props>Material Models30.分网Main Menu>Preprocessor>Meshing>MeshTool31.施加约束Main Menu>Preprocessor>Loads>Define Loads>Apply>Structural>Displacement>On Lines 选取小孔边缘,约束小孔的所有自由度32.加载Main Menu>Preprocessor>Loads>Define Loads>Apply>Structural>Pressure>On Lines选取大孔的半个边缘,33.显示壳单元的厚度旋转模型,使模型显示成薄片状勾选Display of element后,能显示0.3的壁厚。
基于ANSYS的连杆的三维有限元分析

第37卷 第1期2008年2月小型内燃机与摩托车S MALL I N TERNAL COM B UST I O N ENG I N E AND MOTORCYCLEVo.l37No.1Feb.2008基于ANS YS的连杆的三维有限元分析代伟峰 樊文欣 程志军(中北大学振动与噪声研究所 山西太原 030051)摘 要:用有限元软件ANSYS对某军用发动机连杆进行了三维有限元分析,确定了连杆的最大应力部位和疲劳安全系数,为此发动机连杆的可靠性设计提供了依据。
关键词:有限元分析 疲劳 连杆 应力 疲劳安全系数中图分类号:TK413.3 文献标识码:A 文章编号:1671-0630(2008)01-0048-03The3D Finite E lem ent Analysis of D iesel Engi neConnecti ng Rod Based on ANS YSDa iW eife ng,FanW enxin,Cheng Zhij unI nstitute o fV ibration Shock&No ise,North Un iversity of Ch i n a(Taiyuan,030051)Abst ract:I n this paper,w ith the ANSYS,the stress of the eng i n e connection r od is analyzed by usi n g3D fi n ite e le m entm ethod,and the positi o n of the m ax i m u m stress and t h e safe coe ffi c ient o f fati g ue are calcu l a ted. Based upon the results,the reliable design o f the connection rod is i m pr oved.K eyw ords:F i n ite ele m ent ana l y sis,Fati g ue,Connecti n g rod,Stress,Fati g ue safety factor引言连杆是连接发动机活塞与曲轴的一个重要零件,工作中经受拉伸、压缩和弯曲等交变载荷的作用,在发动机设计时,要保证连杆具有足够的结构刚度和疲劳强度。
机械毕业设计(论文)基于ansys的连杆机构的有限元分析【全套设计】

湘潭大学兴湘学院毕业设计论文题目:连杆机构的有限元分析全套设计,加153893706专业:机械设计制造及其自动化学号: 2010963028 姓名:指导教师:完成日期: 2014 年 5 月 25 日湘潭大学兴湘学院毕业论文(设计)任务书论文(设计)题目:连杆机构的有限元分析学号: 2010963028姓名:专业:机械设计制造及其自动化指导教师:系主任:一、主要内容及基本要求1、总结连杆机构设计方法研究和连杆机构研究的发展状况和发展趋势,在总结前人研究成果的基础上,结合当前的技术发展趋势,采用有限元方法来进行开展研究。
2、阐述学习理论基础,即瞬态动力学分析,简要论述瞬态参数,识别原理。
3、简要论述有限元方法和动力学分析的基本求解过程,建立连杆机构中的曲柄滑块机构的有限元模型,合理的确定曲柄长度及转速、连杆长度和转速,偏距,选定和创建单元类型,指点单元属性,创建铰链单元,采用瞬态动力学分析瞬态分析类型对其进行瞬态分析,与图解法进行比较,验证有限元瞬态求解功能。
4、联系工程实际,对受力连杆进行结构静力学学习。
二、重点研究的问题1、 ANSYS的线性静力分析2 、构建几何模型3、在三维铰链单元COMBIN7的创建4、单元类型选择和网络划分5、 ANSYS瞬态动力学分析和静力学分析三、进度安排四、应收集的资料及主要参考文献[1]高耀东,刘学杰.ANSYS机械工程应用精华50例(第三版).- 北京:电子工业出版社,2011.[2]孙波.毕业设计宝典.-西安:西安电子科技大学出版社,2008.[3]温正,张文电.ANSYS14.0有限元分析权威指南.-北京:机械工业出版社,2013.[4]欧阳周,汪振华,刘道德.毕业论文和毕业设计说明书写作指南.-长沙:中南工业大学出版社,1996.[5]华大年,华志宏.连杆机构设计与应用创新.-北京:机械工业出版社,2008.[6]胡仁喜,康士廷.机械与结构有限元分析从入门到精通.-北京:机械工业出版社,2012.[7]李红云,赵社戌,孙雁.ANSYS10.0基础及工程应用.北京:机械工业出版社,2008.[8]唐家玮,马喜川.平面连杆机构运动综合.-哈尔滨:哈尔滨工业大学出版社,1995.[9]潘存云,唐进元.机械原理.-长沙:中南大学出版社,2011.[10]李皓月,周田朋,刘相新.ANSYS工程计算应用教程.-北京:中国铁道出版社,2003湘潭大学兴湘学院毕业论文(设计)评阅表学号2010963028 姓名谭磁安专机械设计制造及其自动化毕业论文(设计)题目:连杆机构的有限元分析湘潭大学兴湘学院毕业论文(设计)鉴定意见学号2010963028 姓名谭磁安专业机械设计制造及其自动化毕业论文77 页图表30 张目录摘要............................................................................................ 错误!未定义书签。
毕业论文参考-基于ANSYS的连杆应力有限元分析及结构优化
XXXXX毕业设计(论文)摘要众所周知,发动机是汽车一切非简单部件中最重要的部件之一。
而曲轴连杆作为发动机转换能源的重要零部件,承担着将燃料化学能转换为机械能的重点工作。
其主要作用是将来自于活塞的力传递给曲轴,使活塞的往返运动转化为曲轴的旋转运动。
在发动机运行时,连杆承受着复杂的载荷,其受力主要包含来自于活塞的压力、活塞及其自身往复运动的惯性力,而且对于这些力的大小和方向,其特征都是周期性变化的。
所以,这就要求强度及刚度对连杆都要满足。
故而需要对发动机连杆进行强度分析及结构优化。
由于计算机的快速发展,采用计算机辅助分析的方法来研究机械结构在工程领域中已广泛使用。
ANSYS是一款通用性很强且功用非常强大的有限元分析软件,故本文以ANSYS14.0为核心对发动机连杆进行了有限元应力分析。
本论文主要做了如下工作:(1)使用UG10.0软件建立了连杆的三维模型,导入ANSYS14.0软件划分网格,得到有限元分析模型。
(2)对发动机连杆进行静力学分析,得到了连杆拉压工况的的应力云图和位移云图。
(3)结合连杆受力情况,对连杆进行了结构优化设计,使其在满足相同强度条件的情况下减少重量,以达到减小惯性力及材料的目标。
本文借助于大型有限元分析软件ANSYS14.0对发动机连杆进行有限元应力分析,验证了连杆的性能及研究了连杆强度计算和优化设计方法,从静力学方面判断出连杆工作的可靠性。
关键词:曲轴连杆,有限元,强度分析,优化IXXXXX毕业设计(论文)ABSTRACTAs we all know, engine is one of the most important parts of all the complex parts of automobile. Crankshaft connecting rod, as an important part of engine power conversion, undertakes the core task of converting fuel chemical energy into mechanical energy.Its main function is to transfer the force from the piston to the crankshaft, so that the reciprocating motion of the piston can be transformed into the rotating motion of the crankshaft. When the engine works, the connecting rod bears harsh working conditions and complex loads. The force mainly comes from the gas force of the piston, the inertia force of the piston and its reciprocating motion, and the magnitude and direction of these forces show periodic changes. Therefore, it requires the connecting rod to have enough strength and stiffness. Therefore, it is necessary to analyze the strength and optimize the structure of the engine connecting rod.Because of the rapid development of computer, the method of computer aided analysis has been widely used in the field of engineering. ANSYS is a very versatile and powerful finite element analysis software, so this paper takes ANSYS14.0 as the core to carry out finite element stress analysis of engine connecting rod.The main work of this paper is as follows:(1) The three-dimensional model of the connecting rod is established by UG10.0 software, and meshed by ANSYS14.0 software, the finite element analysis model is obtained.(2) Static analysis of engine connecting rod is carried out to check the correctness of finite element model and boundary conditions, and stress nephogram which is in accordance with actual working conditions is obtained.(3) Optimized design of the connecting rod in combination with the force of the connecting rod, so that the weight of the connecting rod can be reduced under theIIXXXXX毕业设计(论文)same strength condition, in order to achieve the purpose of reducing inertial force and material.In this paper, the finite element stress analysis of engine connecting rod is carried out by means of the large-scale finite element analysis software ANSYS14.0. The performance of the connecting rod is verified, the strength calculation and the optimization design method of the connecting rod are studied, and the reliability of the connecting rod is judged from the static aspect.KEY WORDS:crankshaft connecting rod, finite element, strength analysis, optimizationIIIXXXXX毕业设计(论文)目录摘要 (I)ABSTRACT ......................................................................................................................I I 目录 . (IV)第一章绪论 (1)1.1论文研究背景和意义 (1)1.2有限元法研究现状 (1)1.3发动机连杆有限元分析研究现状 (2)1.4本章小结 (3)第二章有限元分析基础 (4)2.1有限元法介绍 (4)2.1.1有限元法发展历史 (4)2.1.2有限元法基本理论 (5)2.1.3有限元法分析步骤 (7)2.2ANSYS软件介绍 (9)2.3本章小结 (9)第三章连杆的受力分析 (10)3.1连杆受载情况及参数 (10)3.1.1连杆受力分析 (10)3.1.2已知参数 (11)3.2燃气压力计算 (11)3.3惯性力计算 (12)IVXXXXX毕业设计(论文)3.5连杆最大压应力工况受力分析 (15)3.6本章小结 (16)第四章连杆应力有限元分析与结构优化 (17)4.1连杆三维模型的建立 (17)4.1.1 UG10.0软件介绍 (17)4.1.2建立连杆三维模型 (18)4.1.3三维模型的简化 (19)4.2有限元模型前处理 (22)4.2.1三维模型的导入 (22)4.2.2材料参数的设定 (24)4.2.2单元类型的选择及网格划分 (25)4.3连杆载荷施加及边界条件 (28)4.3.1连杆载荷处理与分布 (28)4.3.1.1载荷处理 (28)4.3.1.2连杆大小端拉应力加载 (29)4.3.1.3连杆大小端压应力加载 (31)4.3.2连杆位移边界条件的确定 (34)4.4运算及结果分析 (35)4.5连杆结构优化分析 (37)4.6.1连杆优化概述 (37)4.6.2连杆优化分析 (38)4.6本章小结 (40)第五章总结与展望 (41)5.1工作总结 (41)5.2工作展望 (42)参考文献 (44)VXXXXX毕业设计(论文)致谢 (46)毕业设计小结 (47)VIXXXXX毕业设计(论文)第一章绪论1.1论文研究背景和意义以往对发动机的主要组成部件的受力分析,只能靠传统力学计算方法,大致反映这些零件受力状态,因为这些零件受力复杂且形状不规则,比如活塞、连杆、气缸、曲轴等。
基于ANSYS软件的内燃机连杆的有限元分析翻译

基于ANSYS软件的内燃机连杆的有限元分析R A Savanoor1, Abhishek Patil2*, RakeshPatil3 and Amit Rodagi2*Corresponding Author: Abhishek Patil,pabhishek170@连杆是连接活塞和曲轴的中间的连接部分的结构。
连杆的作用主要是负责传递推动和拉动的活塞销和曲柄销运动,从而将活塞的往复运动转化为曲轴的旋转运动。
一般连杆生产中使用的材料常见的是碳钢和铝合金连杆。
在本论文中我们在比较两种不同类型的碳钢和铝合金连杆的冯•米塞斯应力和总变形。
老驴三个材料参数进行有限元分析。
如,Von米塞斯应力和位移都从ANSYS软件中获得。
然后比较了铝合金和锻钢这两种不同的材料。
然后发现Al5083合金重量比较轻。
这导致连杆的重量减少63.19%。
关键词:连杆,活塞的往复运动,V on米塞斯应力,ANSYS简介连杆连接活塞与曲轴,它们形成了一个简单的机构,将直线运动转化为旋转运动。
由于活塞的推力,最大的应力出现在连杆的活塞端附近。
除承受燃烧室燃气产生的压力外,还承受纵向和横向的惯性力。
因此,连杆在一个很复杂的盈利状态下工作。
它即受交变的拉力、压应力又受弯曲应力。
连杆的主要损坏形势是疲劳断裂和过量变形。
连杆的工作条件要求连杆具有较高的强度和抗疲劳性能,又要求具有足够的刚性和韧性。
所以,在连杆外形、过度圆角等方面需严格要求,还应注意表面加工质量以提高疲劳强度。
拉伸应力和压缩应力是由于气体压力和弯曲应力的产生的,是由于离心力的作用,产生的偏心力。
因此,连杆的设计一般I-section提供的最大的刚度,能够在活塞端部获得最大应力并且增大刚度可以减少活塞端部的材料收到的应力,而且可以减轻连杆的重量。
曲轴连杆机构运动件的重量优化设计,不仅是节省材料及发动机重量降低,运动件质量对改善发动机整体的工作状况特别有效,ANSYS 形状优化的功能可以对活塞内腔、活塞销孔、连杆形状、曲轴圆角和曲柄臂尺寸进行优化设计。
利用ANSYS软件进行动臂(四连杆)优化设计
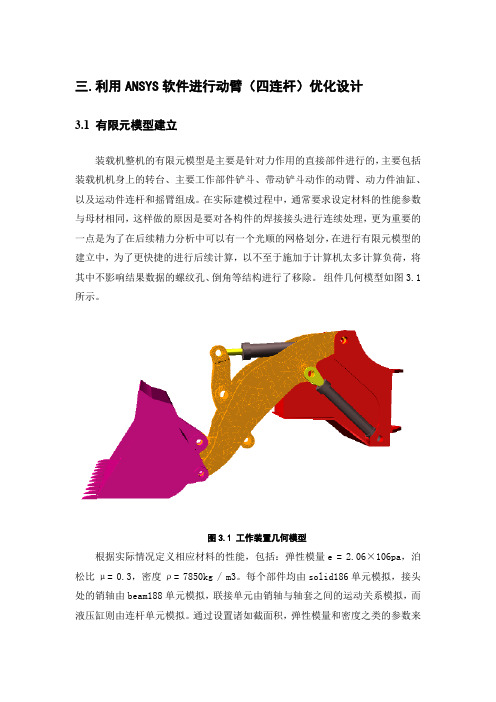
三.利用ANSYS软件进行动臂(四连杆)优化设计3.1有限元模型建立装载机整机的有限元模型是主要是针对力作用的直接部件进行的,主要包括装载机机身上的转台、主要工作部件铲斗、带动铲斗动作的动臂、动力件油缸、以及运动件连杆和摇臂组成。
在实际建模过程中,通常要求设定材料的性能参数与母材相同,这样做的原因是要对各构件的焊接接头进行连续处理,更为重要的一点是为了在后续精力分析中可以有一个光顺的网格划分,在进行有限元模型的建立中,为了更快捷的进行后续计算,以不至于施加于计算机太多计算负荷,将其中不影响结果数据的螺纹孔、倒角等结构进行了移除。
组件几何模型如图3.1所示。
图3.1 工作装置几何模型根据实际情况定义相应材料的性能,包括:弹性模量e = 2.06×106pa,泊松比μ= 0.3,密度ρ= 7850kg / m3。
每个部件均由solid186单元模拟,接头处的销轴由beam188单元模拟,联接单元由销轴与轴套之间的运动关系模拟,而液压缸则由连杆单元模拟。
通过设置诸如截面积,弹性模量和密度之类的参数来实现对实际液压缸的仿真。
要求将元素尺寸控制在15mm〜20mm之内,并在销轴上局部细化网格,这可以提高计算精度。
最后,为了以危险的姿势获得工作装置的整个有限元模型,需要组装每个部件的有限元模型。
有限元模型包括266783个单元,其中包括266638个实体单元,142个梁单元,3个杆单元和444467个节点。
最后,如果装载机转盘需要完全约束,则应采用边界条件。
通过上述过程计算得出的切向和法向挖掘阻力将作为有限元模型中的外部载荷应用于铲斗尖端,如3.2所示。
图3.2 工作装置有限元模型及边界载荷3.2工作装置静强度分析结果据了解,装载机的材料为 q460c 钢,屈服极限为[ ]=235×106 Pa。
结果表明,工作装置的最大应力为802mpa,该应力发生在提升臂的上吊耳的铰孔和铲斗杆的油缸,远远超过了材料的屈服极限。
ansys(连杆)分析
2.50.51.80.31.0R1.4R0.4R0.7R45oSpline through six control points C L C LCrank pin endWrist pin end45o0.280.4 0.33 4.754.0 3.25Ansys 上机操作(第3次)Ansys 实体建模: 由底向上三维实体(连杆)分析实例操作步骤•用由底向上建模技术,练习建立汽车连杆几何模型。
并进行简单的模态分析!1.指定的工作目录,用“c -rod” 作为作业名,进入ANSYS.2. 创建两个圆形面:–Main Menu > Preprocessor > -Modeling- Create > -Areas- Circle > By Dimensions ... •输入RAD1 = 1.4 •输入RAD2 = 1 •输入THETA1 = 0•输入THETA2 = 180, 然后选择[Apply] •输入THETA1 = 45, 然后选择[OK] –或用命令: /PREP7PCIRC,1.4,1,0,180PCIRC,1.4,1,45,180结果以及操作过程可以查看下图:3. 打开面号:–Utility Menu > PlotCtrls > Numbering ...•设置面号为“on”, 然后选择[OK]–或用命令:/PNUM,AREA,1APLOT4. 创建两个矩形面:–Main Menu > Preprocessor > -Modeling- Create > -Areas- Rectangle > By Dimensions ...•输入X1 = -0.3, X2 = 0.3, Y1 = 1.2, Y2 = 1.8, 然后选择[Apply]•输入X1 = -1.8, X2 = -1.2, Y1 = 0, Y2 = 0.3, 然后选择[OK]–或用命令:RECTNG,-0.3,0.3,1.2,1.8RECTNG,-1.8,-1.2,0,0.3结果以及操作过程可以查看下图:5. 平移工作面位置(X=6.5):–Utility Menu > WorkPlane > Offset WP to > XYZ Locations +•回车后在输入窗口输入 6.5 , [OK]–或用命令:WPAVE,6.56. 设置工作平面所在的坐标系为激活坐标系:–Utility Menu > WorkPlane > Change Active CS to > Working Plane–或用命令:CSYS,47.再创建两个圆形面:–Main Menu > Preprocessor > -Modeling- Create > -Areas- Circle > By Dimensions ...•输入RAD1 = 0.7•输入RAD2 = 0.4•输入THETA1 = 0•输入THETA2 = 180, 然后选择[Apply]•输入THETA2 = 135, 然后选择[OK]–或用命令:PCIRC,0.7,0.4,0,180PCIRC,0.7,0.4,0,1358. 在每一组面上分别进行布尔操作:–Main Menu > Preprocessor > -Modeling- Operate > -Booleans- Overlap > Areas +•先选择左边的一组面, 然后选择[Apply]•再选择右边的一组面, 然后选择[OK]–或用命令:AOVLAP,1,2,3,4AOVLAP,5,69. 激活总体笛卡尔坐标系:–Utility Menu > WorkPlane > Change Active CS to > Global Cartesian–或用命令:CSYS,010. 定义四个新的关键点:–Main Menu > Preprocessor > -Modeling- Create > Keypoints > In Active CS …•第一关键点, X=2.5, Y=0.5, 然后选择[Apply]•第二关键点, X=3.25, Y=0.4, 然后选择[Apply]•第三关键点, X=4, Y=0.33, 然后选择[Apply]•第四关键点, X=4.75, Y=0.28, 然后选择[OK]–或用命令:K, ,2.5,0.5K, ,3.25,0.4K, ,4.0,0.33K, ,4.75,0.2811. 激活总体柱坐标系:–Utility Menu > WorkPlane > Change Active CS to > Global Cylindrical–或用命令:CSYS,112. 创建一条线(由一系列关键点拟合一条样条曲线):–Main Menu > Preprocessor > -Modeling- Create > -Lines- Splines > With Options > Spline thru KPs +•顺序拾取如图形窗口所示的六个关键点, 然后选择[OK]•输入XV1 = 1 (总体柱坐标系,关键点1处的半径)•YV1 = 135 (总体柱坐标系,关键点1处的角度)•XV6 = 1 (总体柱坐标系,关键点6处的半径)•YV6 = 45 (总体柱坐标系,关键点6处的角度)•按[OK]–或用命令:BSPLIN,5,6,7,21,24,22,1,135,,1,45结果以及操作过程可以查看下图:13. 通过关键点1和18创建一条直线 :–Main Menu > Preprocessor > -Modeling- Create > -Lines- Lines > Straight Line +•拾取图形窗口所示的两个关键点, 然后选择[OK]–或用命令:LSTR, 1, 1814. 打开线号,显示线:–Utility Menu > PlotCtrls > Numbering ...•设置 Line numbers为“on”, 然后选择[OK]–Utility Menu > Plot > Lines–或用命令:/PNUM,LINE,1LPLOT15. 以预先定义的线6, 1, 7, 25 为边界创建一个新面:–Main Menu > Preprocessor > -Modeling- Create > -Areas- Arbitrary > By Lines +•拾取四条线 (6, 1, 7, 和 25), 然后选择[OK]–或用命令:AL, 6, 1, 7, 2516. 放大连杆左边部分:–Utility Menu > PlotCtrls > Pan, Zoom, Rotate …•拾取[Box Zoom]17. 创建三个线与线的倒角:–Main Menu > Preprocessor > -Modeling- Create > -Lines- Line Fillet +•拾取线 36 和 40, 然后选择[Apply]•输入RAD = .25, 然后选择[Apply]•拾取线 40和 31, 然后选择[Apply]•按[Apply]•拾取线 30和 39, 然后选择[OK]•按[OK]–Utility Menu > Plot > Lines–或用命令:LFILLT,36,40,0.25LFILLT,40,31,0.25LFILLT,30,39,0.25LPLOT18. 以预先定义的圆角为边界,创建一新的面:–Main Menu > Preprocessor > -Modeling- Create > -Areas- Arbitrary > By Lines +•拾取线 12, 10, 和 13, 然后选择[Apply]•拾取线 17, 15, 和19, 然后选择[Apply]•拾取线 23, 21, 和24, 然后选择[OK]–Utility Menu > Plot > Areas–或用命令:AL, 12, 10, 13AL, 17, 15, 19AL, 23, 21, 24APLOT19. 把所有的面加起来:–Main Menu > Preprocessor > -Modeling- Operate > Add > Areas +•拾取[Pick All]–或用命令:AADD,ALL20. 选择Fit 使整个模型充满图形窗口:–Utility Menu > PlotCtrls > Pan, Zoom, Rotate …•按[Fit]21. 关闭线号和面号:–Utility Menu > PlotCtrls > Numbering ...•设置线号和面号为“ off ”, 然后选择[OK]–Utility Menu > Plot > Areas/PNUM,LINE,0/PNUM,AREA,0APLOT22. 激活总体笛卡尔坐标系:–Utility Menu > WorkPlane > Change Active CS to > Global Cartesian –或用命令:CSYS,023. 以X-Z 平面 (在 Y 方向) 为对称面,对面进行镜面反射:–Main Menu > Preprocessor > -Modeling- Reflect > Areas +•拾取[Pick All]•选择 X-Z平面, 然后选择[OK]–或用命令:ARSYM,Y,13至此,建模结果为:24. 把所有的面加起来:–Main Menu > Preprocessor > -Modeling- Operate > Add > Areas +•拾取[Pick All]AADD,ALL25. 关闭工作平面:–Utility Menu > WorkPlane > Display Workin g Plane–或用命令:WPSTYLE26. 存储并退出 ANSYS:–在工具条中拾取“SAVE_DB”–在工具条中拾取“QUIT”•选择“Quit - No Save!”•按[OK]–或用命令:SAVE这里,建模工作已经完成,并进行保存,图形为:FINISH/EXIT,NOSAVE。
论文答辩PPT-基于ANSYS的连杆应力有限元分析及结构优化
答辩人: 指导老师: XXXXX学院 XXXX工程 202X年6月
目录 contens
1 绪论 2 连杆应力有限元分析过程 3 研究结果 4 连杆结构优化 5 论文总结 6 致谢
绪论
研究背景 研究意义
研究背景
连杆可靠性 设计的需要
01
发动机连杆小端与活塞做往复运动,连杆大端与曲轴做旋转运动, 因此连杆除了有上下运动外,还会左右摆动,做复杂的平面运动。所 以连杆的受力情况十分复杂,工作中受拉伸、压缩和弯曲等交变载荷 的作用,易引起连杆的疲劳破坏,故而需对连杆进行受力分析,确保 连杆的可靠性。
STEP 1 二维图纸
STEP 2 三维模型建立
STEP 3 三维模型简化
利用UG NX10.0软件对连杆进行三维 建模,完成如图。
为使有限元网格划分均匀,提高单元质量 及计算精度,简化连杆小圆角、小倒角及尖锐 部分,完成如图。
连杆有限元模型的建立
使用间接导入法将连杆三维模型导入ANSYS14.0软件中,为模型添加好弹性模量、泊松 比、密度等材料参数,并使用SOLID186单元划分网格,形成有限元模型。
设定网格单元长度为6,使用 OLID186单元对三维模型进行网格划 分,完成如图。网格整体规整。
载荷施加与位移边界条件
大小端拉应力加载
在连杆拉伸应力工况条件下,分别选择连杆大小端孔外侧为受拉面,对连杆小端施加 19.75cos1.5α Mpa的载荷,对连杆大端施加9.8cos1.5α Mpa的载荷。
本文对连杆进行静力学分析,故选取连杆受最大拉、压应力的情况作为研究对象。经过分 析发动机连杆工作循环受力情况结合文献资料可以得到:
最大拉应力工况
基于ANSYS多连杆压力机滑块锁紧装置参数优化设计
}
3
,
统 解决 方 案 。A YSWok e c 产 品设 计 流程 , NS r b n h
如图1 示。 所
De i n Xp or r sg l e
0 _』 \
一
/
— n 1
l
1 \
= = l
图1 A WE系统 框
AW E系 统 框 主 要 包 含 以 下 3 重 要 模 块 :几 个
霉 3t 21年 1 4 o 2 。 m e w期 n 9.O俾 t ol o ki g/  ̄ f
www
. .
co m
铸造 套磊 … 热~ “工 加
o Wo
座 板 3 螺 钉 固 定 在 横 梁 1 ,支 座 6 螺 栓 固 用 上 用 定 在 滑 块 2 。锁 紧 作 用 时 ,按 动 主 操 作 面 板 上 的 上 按 钮 , 由气 缸 5 动 锁 紧 销 4 推 向前 运 动 ,插 入 支 座 6 上 对 应 的锁 紧 孔 内 ,完 成 锁 紧动 作 。本 装 置 为滑 块 在 两 个位 置 上 提供 锁 紧 保 障功 能 。每 台压 力 机具 备 两 套 滑块 锁 紧装 置 。
功 能 ,确 保操 作 人 员修 模 时滑 块 处 于安 全 位 置 ,与
《ANSYS 18.2有限元分析与应用实例 》案例目录
BEAM188
SOLID185 SOLID185 SOLID185 SOLID186 SURF154 SOLID186 TARGE170 CONTA174 PRETS179 BEAM188 SOLID186
SOLID186
页次
E16-1 E16-2* E16-3 E16-4 E16-5 E16-6 E16-7 E16-8* E16-9*
材料蠕变分析实例——受拉平板
PLANE182
接触分析实例——平行圆柱体承受法向载荷时的接触应力 分析
PLANE183 SOLID186 TARGE170
CONTA174
接触分析实例——组合厚壁圆筒
PLANE183 TARGE169
CONTA172
SHELL181
SOLID185 非线性分析实例——将钢板卷制成圆筒(柔体-柔体接触) MPC184
用云图显示线单元数据 面操作 通过存储祯创建动画 坐标系以及选择操作应 用实例
描
述
用 ANSYS 软件提取单元及结构刚度矩阵
用 SOLID185 单元分析悬臂梁的剪切闭锁
厚壁圆筒的体积闭锁分析
观察沙漏
平面桁架的受力分析
关键点和线的创建实例——正弦曲线
一些特殊线的创建。包括:过一个已知关键点作一个已知 圆弧的切线、作两条圆弧的公切线、作一组折线、按函数 关系作曲线——正弦曲线、圆锥阿基米德螺旋线、圆锥对 数螺旋线和创建椭圆线
SOLID186
60
斜齿圆柱齿轮的固有频率分析
SOLID185
有预应力模态分析实例—弦的横向振动
LINK180
循环对称结构模态分析实例——转子的固有频率分析
SHELL181
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录摘要 ............................................................................................ 错误!未定义书签。
Abstract (2)第一章分析方法和研究对象 ........................................... 错误!未定义书签。
1.1 有限单元法的概述....................................................... 错误!未定义书签。
1.1.1 有限单元法的历史 (4)1.1.2 有限单元法的基本概念 (4)1.2 ANSYS软件简介 (4)1.2.1 ANSYS主要应用领域 (4)1.2.2 ANSYS操作界面 (5)1.2.3 ANSYS的主要功能 (6)1.2.4 ANSYS主要特点 (7)1.3 曲柄滑块机构简介 (7)1.3.1 曲柄滑块定义 (8)1.3.2 曲柄滑块机构特性应用以及分类 (8)第二章曲柄滑块机构的求解 (10)2.1 曲柄滑块机构的问题描述 (10)2.2 曲柄滑块机构问题的图解法 (10)2.2.1 图解法准备工作 (11)2.2.2 图解法操作步骤 (11)第三章有限元瞬态动力学概述 (14)3.1 有限元瞬态动力学定义 (14)3.2 瞬态动力学问题求解方法........................................... 错误!未定义书签。
3.2.1 完全法 (14)3.2.2 模态分析法 (14)3.2.2 缩减法 (15)3.1 有限元结构静力学分析基本概念 (15)3.1 有限元结构静力学分析步骤 (16)第四章曲柄滑块的有限元瞬态动力学分析 (17)4.1 曲柄滑块机构瞬态简要概述 (17)4.2曲柄滑块有限元瞬态动力学分析步骤 (18)4.2.1 定义工作名和参量 (18)4.2.2 创建单元类型和属性 (18)4.2.3 建立模型 (20)4.2.4进入求解器设置 (22)4.2.5 定义约束 (23)4.2.6 求解 (24)4.2.7 后处理 (24)4.2.8 查看、分析结果得出结论 (25)第五章连杆的结构静力学有限元分析 (27)5.1连杆机构静力学分析步骤 (27)5.1.1 前处理 (27)5.1.2 施加约束和载荷并求解 (33)5.1.3 后处理 (33)总结与展望 (36)参考文献 (37)致谢 (38)附录1 (39)附录2 (55)连杆机构的有限元分析摘要:基于ansys的有限元分析是一个功能强大的通用有限元分析软件,目前广泛的用于船舶,汽车,航天航空,土木工程,机械制造及其科学研究领域。
这款软件从最初的只能在大型机上使用、仅仅提供热分析的和线性结构分析功能的批处理程序,发展成一个融结构、流体、电场、磁场、声场分析于一体的可在大多数计算机及操作系统中运行的大型通用有限元分析软件。
连杆机构是是工程中常见的一种机构,其中曲柄滑块机构是连杆机构的一种,应用十分广泛,比如在柴油机上的应用。
随着工程科技的发展,对其精度也有很搞得要求。
本课题是基于ansys软件对曲柄滑块机构进行瞬态动力学分析,与传统的计算相比,借助于计算机有限元分析方法能更加快并且精确地得到结果,设置正确的参数,创建合理的单元类型,设置合理的求解过程,能够准确的得出分析模型的正确求解值,对机构的设计和优化有很大的帮助。
当然在分析过程中也会存在结果误差,ansys分析值与理论值有差异的原因可能是对曲柄滑块机构进行分析时输入的弹性模量,泊松比的相关参数等对分析结果有一定的影响。
关键词:连杆机构;曲柄滑块机构;有限元法;ANSYS;瞬态动力学分析The finite element analysis of link mechanism Abstract:Ansys ( finite element analysis) is a powerful general-purpose finite elem ent analysis software.Currently, it is widely used in shipbuilding, automoti ve, aerospace, civil engineering, machinery manufacturing and scientific resea rch.Initially, it can only be using on the mainframe and provides thermal analysis and linear structural analysis capability, but now,It has developed i nto a financial structure, fluid, electric field, magnetic field, sound field analysi s in one can run on most computer and operating system in the large-scale gen eral finite element analysis software.Connecting rod mechanism is a common mechanism, the slider crank mech anism is an extension of link mechanism, a wide range of applications, such as in a diesel engine.With the development of engineering technology ,th e accuracy is also very make requirements.Topic is on the slider crank mechanism was analyzed based on the ANSY S software, and compared with the traditional calculation,With the help of co mputer finite element analysis method can more quickly and accurately obtain results, set the correct parameters, create the appropriate element type, set the solving process is reasonable, can accurately obtain the correct solution analysi s model, the design and optimization of the organization has a great help.Of course, the error will exist in the analysis process, ansys analysis is due to a difference can be input to the analysis of the elastic modulus of crank s lide mechanism and the theoretical value, the Poisson's ratio of the relevant parameters have a certain effect on the analysis results.Keywords:link mechanism;Slider crank mechanism;Transient dynamic analysis第一章分析方法和研究对象1.1有限单元法概述有限单元法(Finite Element Analysis)的基本理念是用较简单的问题代替复杂问题后再求解。
它将求解域看成由许多称为有限元的小的互连子域组成,对每一个单元假定一个合适的近似解,然后推导求解这个域总的满足条件,从而得到问题的解。
这个解不是准确解,而是近似解,因为实际问题被比较简单的问题所代替。
由于大多数实际问题难以得到准确解,而有限元不仅精度高,而且能适应各种复杂形状,因而成为行之有效的工程分析手段。
1.1.1有限单元法的历史有限单元法早在40年代初期就已有人提出,但当时由于没有计算工具而搁置,一直到50年代中期,高速数字电子计算机的出现和发展为有限单元法的应用提供了重要的物质条件,才使有限单元法得以迅速发展。
有限单元法在西方起源于飞机和导弹的结构设计,发表这方面文章最早而且最有影响的是西德的J.H.Argyris教授,于1954–1955年间,他在《Aircraft engineering》上发表了许多有关这方面的论文,并在此基础上写成了《能量原理与结构分析》,此书成为有限单元法的理论基础。
美国的M.T.Turner,L.J.Topp 和R.W.Clough,H.C.Martin等人于1956年发表了一篇题为《复杂结构的刚度和挠度分析》一文,此文提出了计算复杂结构刚度影响系数的方法,说明了如何利用计算机进行分析。
美国教授R.W.Clough于1960年在一篇介绍平面应力分析的论文中,首次提出了有限单元法的名字。
1965年英国的Zienliewice教授及其合作者解决了将有限元应用于所有场的问题,使有限单元法的应用范围更加广泛。
有限单元法的优点很多,其中最突出的优点是应用范围广。
发展至今,不仅能解决静态的、平面的、最简单的杆系结构,而且还可以解决空间问题、板壳问题、结构的稳定性问题、动力学问题、弹塑性问题和粘弹性问题、疲劳和脆性断裂问题以及结构的优化设计问题,而且不论物体的结构形式和边界条件如何复杂,也不论材料的性质和外载荷的情况如何,原则上都能应用。
1.1.2有限单元法的基本概念有限单元法的基本思想,是在力学模型上将一个原来连续的物体离散成为有限个具有一定大小的的单元,这些单元仅在有限个节点上相连接,并在节点上引进等效力以代替实际作用于单元上的外力。
对于每个单元,根据分块近似的思想,选择一种简单的函数来表示单元内位移的分布规律,并按弹性理论中的能量原理(或用变分原理)建立单元节点力和节点位移之间的关系。
最后,把所有的单元的这种关系式集合起来,就得到一组以节点位移为未知量的代数方程组,解这些方程组就可以求出物体上有限个离散节点上的位移。