力士乐驱动器使用说明.-共24页
rexroth gerotor 泵 pgz 使用说明说明书
德国rexroth泵PGZ使用说明力士乐致力于为各类机械和系统设备提供安全、精准、高效以及高性价比的传动与控制技术。
公司融合全球的应用经验,研发创新的产品,为行走机械、机械应用与工程、工厂自动化及可再生能源每一个细分市场的客户量身定制系统解决方案及服务。
博世力士乐同时为客户提供各种液压、电子传动与控制、气动、齿轮、线性传动及组装技术。
公司业务遍及全球80多个国家,拥有37,500多名专业员工,2012年全球的销售额近65亿欧元。
业务部门行走机械:建筑机械、物料搬运设备、农业与林业机械、商用/公路汽车机械应用与工程、工厂自动化:运动机构、汽车工业、采矿业、石油和天然气钻探(地面)、舞台技术、化工业、印刷与纸张处理、能源技术、物料输送、玻璃机械制造、橡胶加工、半导体和电子工业、木工行业、水平定向钻机、发动机、塑料机械和拉磨机、冶金、矿山设备、组装与装卸、挖泥船、近海工程、加工与包装、测试技术、回收和垃圾处理、船舶工程、运动模拟技术、太阳能、机床(切削)、水利工程、盾构机、金属成形机床和压机、传送技术、流体动力研究、船厂设备、水泥工业、制糖工业、纸浆和造纸机械。
可再生能源:风能产品组群驱动技术、电子传动与控制技术、浇注成型技术、齿轮技术、工业液压、线性传动技术、行走液压、组装技术、气动、拧紧与焊接技术Gerotor泵具有恒定排量PGZ帧大小4,5尺寸20 (140)最大工作压力15bar最大排量136.3cm?特征具有固定排量的低压泵极低的运行噪音适用于广泛的粘度和速度范围出色的吸力特性可与轴向柱塞泵,内齿轮泵和叶片泵组合使用用途:工业或移动应用中的低压冷却,过滤器或润滑剂回路,例如塑料加工机器,机床,压力机和风力涡轮机。
相关型号推荐PR4-3X/1.60-700RA01M03,PR4-3X/1.60-700RA01V01,PR4-3X/2.00-700RA01M01,PR4-3X/2.50-700RA01M01,PR4-3X/2.50-700RK01M01,PR4-3X/2.50-700RA01V01,PR4-3X/3.15-700RA01M01,PR4-3X/3.15-700RG01M01,PR4-3X/4.00-700RA01M01,PR4-3X/4.00-700RG01M01,PR4-3X/6.30-700RA01M01,PR4-3X/6.30-700RA01M08,PR4-3X/6.30-700RA01V12,PR4-3X/8.00-700RA01M01,PR4-3X/8.00-700RA01M02,PR4-3X/8.00-700RA12M01,PR4-3X/3.15-500RA01M01,PR4-3X/5.00-500RA01M01,PR4-3X/6.30-500RA01M01,PR4-3X/8.00-500RA01M01,PR4-3X/10.00-500RA01M01,PR4-3X/10.00-500RA12V01,PR4-3X/16.00-500RA01M01,PR4-3X/20.00-500RA01M01,PR4-3X/16,00-500RA12M01PR4-3X/2,00-700RA01M01R900452697产品描述建立PGZ型液压泵是具有恒定排量的齿轮泵。
中文力士乐03系列DKC伺服驱动器参数手册
前言本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同行在不急需时参考。
在本说明书的后半部分,附有英文原版说明书,如遇到不能理解之词汇,读者可以再次翻译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中文说明书网上基本没有。
779K于2010年11月15日22时30分德国力士乐伺服驱动器参数说明书ECODRIVE03设备一般自动化本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999传输,以及本文件复制,商业使用或将其内容不得沟通无明确的书面许可。
违反这些规定将要求赔偿。
为实施专利或者发行版权所有注册外观设计。
(德国工业标准34-1)有效期保留所有权利就这个文件的内容和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885部完(OS/TH)注意:本文件印在无氯漂白纸。
总结文件 - 概述内容1一般资料1-1使用本手册............................................... ................................ 1-1定义................................................. ............................................ 1-22月2日至1日标准参数S - 0 - 0001,NC的周期时间(TNcyc )...................................... ................. 2-1S - 0 - 0002,SERCOS的周期时间(Tscyc )...................................... ..................................... 2-1S - 0 - 0003,最小的AT发送起始时间(T1min)....................... 2-1S - 0 - 0004,发送/接收转换时间(TATMT).................................... ................................ 2-1S - 0 - 0005,最小反馈采集时间(T4min )..................................... ............................ 2-2S - 0 - 0006,在传输开始时间(T1)..................................... ......................................... 2-2S - 0 - 0007,反馈收购启动时间(甲状腺素)..................................... .................................. 2-2S - 0 - 0008,命令的有效时间(T3)的...................................... ................................................. 2-3S - 0 - 0009,开始处理主数据电报...................................... ........................... 2-3S - 0 - 0010,长度主数据电报....................................... ............................................ 2-3S - 0 - 0011,1级诊断......................................... .................................................. ........... 2-3S - 0 - 0012,第2类诊断......................................... .................................................. ........... 2-4S - 0 - 0013,3级诊断......................................... .................................................. ........... 2-5S - 0 - 0014,接口状态.......................................... .................................................. ................. 2-6S - 0 - 0015电类型参数......................................... .................................................. .. 2-7S - 0 - 0016,自定义放大器电报配置清单....................................... ......................... 2-8S - 0 - 0017,国际化域名列表,所有业务数据列表..................................... ..................... .. 2-8S - 0 - 0018,国际化域名列表,对运行数据的CP2名单.................................... ............................... 2-8 S - 0 - 0019,国际化域名列表,为CP3运行数据清单.................................... ................................... 2-8 S - 0 - 0021,国际化域名列表,为商业无效运算数据列表。
中文力士乐03系列DKC伺服驱动器参数手册
前言本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同行在不急需时参考。
在本说明书的后半部分,附有英文原版说明书,如遇到不能理解之词汇,读者可以再次翻译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中文说明书网上基本没有。
779K于2010年11月15日22时30分德国力士乐伺服驱动器参数说明书ECODRIVE03设备一般自动化本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999传输,以及本文件复制,商业使用或将其内容不得沟通无明确的书面许可。
违反这些规定将要求赔偿。
为实施专利或者发行版权所有注册外观设计。
(德国工业标准34-1)有效期保留所有权利就这个文件的内容和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885部完(OS/TH)注意:本文件印在无氯漂白纸。
总结文件 - 概述内容1一般资料1-1使用本手册............................................... ................................ 1-1定义................................................. ............................................ 1-22月2日至1日标准参数S - 0 - 0001,NC的周期时间(TNcyc )...................................... ................. 2-1S - 0 - 0002,SERCOS的周期时间(Tscyc )...................................... ..................................... 2-1S - 0 - 0003,最小的AT发送起始时间(T1min)....................... 2-1S - 0 - 0004,发送/接收转换时间(TATMT).................................... ................................ 2-1S - 0 - 0005,最小反馈采集时间(T4min )..................................... ............................ 2-2S - 0 - 0006,在传输开始时间(T1)..................................... ......................................... 2-2S - 0 - 0007,反馈收购启动时间(甲状腺素)..................................... .................................. 2-2S - 0 - 0008,命令的有效时间(T3)的...................................... ................................................. 2-3S - 0 - 0009,开始处理主数据电报...................................... ........................... 2-3S - 0 - 0010,长度主数据电报....................................... ............................................ 2-3S - 0 - 0011,1级诊断......................................... .................................................. ........... 2-3S - 0 - 0012,第2类诊断......................................... .................................................. ........... 2-4S - 0 - 0013,3级诊断......................................... .................................................. ........... 2-5S - 0 - 0014,接口状态.......................................... .................................................. ................. 2-6S - 0 - 0015电类型参数......................................... .................................................. .. 2-7S - 0 - 0016,自定义放大器电报配置清单....................................... ......................... 2-8S - 0 - 0017,国际化域名列表,所有业务数据列表..................................... ..................... .. 2-8S - 0 - 0018,国际化域名列表,对运行数据的CP2名单.................................... ............................... 2-8 S - 0 - 0019,国际化域名列表,为CP3运行数据清单.................................... ................................... 2-8 S - 0 - 0021,国际化域名列表,为商业无效运算数据列表。
力士乐驱动器使用说明教学文案

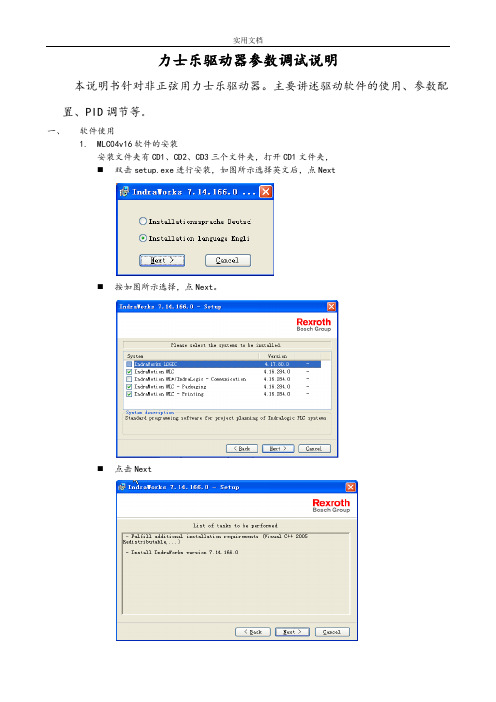
力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
博世力士乐静压功能模块说明书

新闻联系人: 博世力士乐 2016-11-22静压功能模块:安全,成熟,可靠功能安全和创新特性提高了行走机械的整体效率大幅降低集成成本:完善的静压行走驱动解决方案,兼具功能安全性和创新功能,符合相关标准。
2016年11月22日,上海——采用博世力士乐的功能模块,车辆制造商在应用静压行走驱动系统时可大幅降低成本。
该款功能模块集创新功能和标准安全特性于一身,符合机械安全指南的相关要求。
此外,博世力士乐的开发人员还研究了所有元件之间的相互关系,进一步提升了该款功能模块的可靠性。
博世力士乐对各功能模块进行了风险分析,根据相关标准选择该应用所需的性能等级,如性能等级b ,性能等级c 以及C 级标准,如此一来,可以帮助车辆制造商大幅降低该项成本。
该功能模块的标准硬件和软件配置可满足上述性能等级。
此外,开发人员还以FMEA 为基础,确定了系统部件的相互关系。
系统负荷根据在无数应用中测得的实际负荷确定,并据此对系统部件进行了相应调整,从而进一步提升了该款功能模块在实际应用中的可靠性和可用性。
对于希望进入欧洲行走机械市场的车辆制造商来说,博世力士乐的功能模块帮助提升静压行走驱动装置的性能,符合当地的机械安全指南的相关要求。
搭载标准安全功能的静压行走驱动控制集成在DRC 行走驱动软件内。
车辆制造商可以花费更低的工程成本,为轮式装载机或伸缩臂叉车配备新型驱动解决方案。
“2+1”行走驱动模块最多可降低20%的燃料消耗,且不会造成牵引力中断。
最大输出功率130 kW 的柴油发动机驱动轴向柱塞泵,油泵接至变量马新闻联系人: 博世力士乐 2016-11-22达和定量马达。
驱动范围自动调节,可实现最高40 km/h 的行驶速度。
控制单元集成的软件可避免牵引力为零的情况出现,显著提升操作人员的舒适度。
该功能模块适合工作重量6~16吨,牵引力不超过120 kN 的行走和农业机械。
“动力换档”功能满足 DIN EN ISO 13849标准的安全要求,对手动和自动切换进行控制。
中文力士乐03系列DKC伺服驱动器参数手册
前言本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同行在不急需时参考。
在本说明书的后半部分,附有英文原版说明书,如遇到不能理解之词汇,读者可以再次翻译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中文说明书网上基本没有。
779K于2010年11月15日22时30分德国力士乐伺服驱动器参数说明书ECODRIVE03设备一般自动化本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999传输,以及本文件复制,商业使用或将其内容不得沟通无明确的书面许可。
违反这些规定将要求赔偿。
为实施专利或者发行版权所有注册外观设计。
(德国工业标准34-1)有效期保留所有权利就这个文件的内容和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885部完(OS/TH)注意:本文件印在无氯漂白纸。
总结文件 - 概述内容1一般资料1-1使用本手册............................................... ................................ 1-1定义................................................. ............................................ 1-22月2日至1日标准参数S - 0 - 0001,NC的周期时间(TNcyc )...................................... ................. 2-1S - 0 - 0002,SERCOS的周期时间(Tscyc )...................................... ..................................... 2-1S - 0 - 0003,最小的AT发送起始时间(T1min)....................... 2-1S - 0 - 0004,发送/接收转换时间(TATMT).................................... ................................ 2-1S - 0 - 0005,最小反馈采集时间(T4min )..................................... ............................ 2-2S - 0 - 0006,在传输开始时间(T1)..................................... ......................................... 2-2S - 0 - 0007,反馈收购启动时间(甲状腺素)..................................... .................................. 2-2S - 0 - 0008,命令的有效时间(T3)的...................................... ................................................. 2-3S - 0 - 0009,开始处理主数据电报...................................... ........................... 2-3S - 0 - 0010,长度主数据电报....................................... ............................................ 2-3S - 0 - 0011,1级诊断......................................... .................................................. ........... 2-3S - 0 - 0012,第2类诊断......................................... .................................................. ........... 2-4S - 0 - 0013,3级诊断......................................... .................................................. ........... 2-5S - 0 - 0014,接口状态.......................................... .................................................. ................. 2-6S - 0 - 0015电类型参数......................................... .................................................. .. 2-7S - 0 - 0016,自定义放大器电报配置清单....................................... ......................... 2-8S - 0 - 0017,国际化域名列表,所有业务数据列表..................................... ..................... .. 2-8S - 0 - 0018,国际化域名列表,对运行数据的CP2名单.................................... ............................... 2-8 S - 0 - 0019,国际化域名列表,为CP3运行数据清单.................................... ................................... 2-8 S - 0 - 0021,国际化域名列表,为商业无效运算数据列表。
Rexroth (博世力士乐)Fe 变频器使用说明书
3 重要的使用说明............................................................ 27
3.1
正确的使用............................................................................. 27
批注本地保存成功开通会员云端永久保存去开通
DOK-RCON01-FE*********-IB09-ZH-P Rexroth Fe 变频器
Bosch Rexroth AG
III/203
目录
目录
页数
1
1.1 1.2 1.3 1.3.1 1.3.2 1.3.3 1.4 1.4.1 1.4.2 1.4.3 1.4.4 1.5 1.5.1 1.5.2 1.5.3 1.5.4 1.5.5
安全说明的使用和传递.................................................................. 22 安全使用要求.......................................................................... 22 使用不当引发的危险.................................................................... 23 针对特殊危险的说明..................................................................... 23 与电气元件和外壳接触的防护............................................................ 23 保护性特低压防止电击.................................................................. 24 危险动作的防护........................................................................ 24 在操作和安装期间对磁场和电磁场的防护.................................................. 25 与高温部件接触的防护.................................................................. 25 搬运与安装时的防护.................................................................... 25
力士乐驱动器使用说明书
力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
力士乐驱动器使用说明书
本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用
1.MLC04v16软件的安装
安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,
⏹双击setup.exe进行安装,如图所示选择英文后,点Next
⏹按如图所示选择,点Next。
⏹点击Next
⏹点击Next
⏹选择接受,后点击Next
⏹输入名称,点击Next
⏹选择安装目录,然后点击Next
⏹点Install
⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:
⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作
⏹打开软件
●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序
->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用
●工程的使用
如下图
点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备
点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机
打开工程后变为
点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口
点Next后自动寻找设备。
未找到设备则弹出下面创库
示波器功能
点Diagnostics下拉菜单,点击Oscilloscope
下图所示为示波器窗口。
采集时间配置:
点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数
Time period:每10ms采集一个点
Recording time:前面两项相乘得出的总采样时间。
触发方式配置:
点击上图右下角的Configure后弹出如下窗口:
Manual trigger 为手动触发。
PreTrigger 为记录触发前数据长度的百分数,触发后数据长度的百分数。
自动触发:
点击Select选择触发源
选择后如下图所示
== 当实际值Actual value=Trigger Value时触发
Both edges 当Actual value>Trigger Value或Actual value<Trigger Value 时产生的上升沿和下降沿触发。
Edge下降沿触发
Edge上升沿触发
采集配置
点击Signals后弹出如下窗口,选择要采集的信号
手动触发数据采集时先点Start再点Trigger。
●
3.
二、参数配置
1.DP配置
⏹Master communication address: 2 从站地址。
⏹Baudrate: 波特率由主站决定
⏹Cycle time: 2019 us 通讯周期
⏹Watchdog time: 12ms 通讯看门狗时间
⏹Length of parameter channel 0 byte 参数通道长度
⏹Length of cyclic real-time channel 20byte 实时数据通道(驱动器向PLC一次可
以写20个字节)
⏹Length of cyclic command channel 10byte 命令数据通道(PLC向驱动器一次可
写10个字节)
2.轴设定
⏹Scaling type: 选择linear直线轴。
⏹Position data format:absolute绝对位置
⏹Maxinum travel range l: 360 mm 最大行程
⏹Feed constant k: 16 mm/rev 导程
⏹Input revolutions of load gear n1 : 1 输入比例⏹Output revolutions of load gear n2 : 1 输出比例
3.设定原点
⏹Clear position status: 清除当前位置
⏹Set absolute measuring: 设定位置
4.主轴监视
⏹Velocity command value 60RPM。
监视当前设定频率
⏹Target Position: 270 deg 监视当前电机所处正弦的相位
⏹Master axis format converter:P-0-0758:Virtual master axis,actual position value。
主轴模
式为虚拟主轴,实际位置。
5.MLD配置
⏹PLC has permanent control over the drive:驱动器具备PLC功能(可编程逻辑控制)。
⏹Motion errors at FB do not trigger any(axis) errors :在FB内发生的motion错误不触
发轴错误
⏹Axisdata structure supported 支持程序内调用轴数据
6.电阻设置
⏹Nom,braking resistance 160ohm 制动电阻160欧姆⏹Braking resistor contin 50W 制动电阻功率50W ⏹Max,regener power tobe absorbed: 1KWS
7.参数保存
修改完参数后必须按如图操作,否则不能保存参数。
8.下载凸轮表5,6,7,8
凸轮表5,6,7,8不能直接下载,需用如下方法下载 首先按如图所示保存为外部文件
其次再按图所示导入凸轮表
再上传凸轮表会如下图:
9.IO配置
⏹1,2脚位电源输入,在程序内部可读P-0-0861的第0位。
⏹3,4,5,6,7为数字量输入,分别为P-0-1394的第0,1,2,3,4位。
并可通过IB8访问,
同样是0,1,2,3,4位。
⏹1,2为模拟量输出。
⏹4,5为模拟量输入。
⏹6,7,8脚位数字量输入
⏹9为数字量输出
⏹如图所示配置,为把实际电流通过模拟量送出。
对应关系为0~5V对应-70A~70A。
每伏对应28A。
⏹如图所示配置为采集0~10V信号,并映射到IB10,可用程序访问IB10。
10.固件版本更新
⏹首先打开FirmWare management
⏹选择本地FirmWare后显示在左侧,右侧为当前驱动器内的的FirmWare
⏹点击DownLoad 后下载新固件。
三.PID调节
⏹位置环
位置环增益:提高此参数可以提高位置整定的速度。
位置环前馈:提高此参数可补偿位置环的变化。
⏹速度环
速度环增益KP:提高此参数值,提高速度环强度,提高调节速度。
速度环积分时间:提高此参数值,可较少速度波动,但是会降低响应时间。