力士乐驱动器使用说明
中文力士乐03系列DKC伺服驱动器参数手册
前言本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同行在不急需时参考。
在本说明书的后半部分,附有英文原版说明书,如遇到不能理解之词汇,读者可以再次翻译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中文说明书网上基本没有。
779K于2010年11月15日22时30分德国力士乐伺服驱动器参数说明书ECODRIVE03设备一般自动化本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999传输,以及本文件复制,商业使用或将其内容不得沟通无明确的书面许可。
违反这些规定将要求赔偿。
为实施专利或者发行版权所有注册外观设计。
(德国工业标准34-1)有效期保留所有权利就这个文件的内容和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885部完(OS/TH)注意:本文件印在无氯漂白纸。
总结文件 - 概述内容1一般资料1-1使用本手册............................................... ................................ 1-1定义................................................. ............................................ 1-22月2日至1日标准参数S - 0 - 0001,NC的周期时间(TNcyc )...................................... ................. 2-1S - 0 - 0002,SERCOS的周期时间(Tscyc )...................................... ..................................... 2-1S - 0 - 0003,最小的AT发送起始时间(T1min)....................... 2-1S - 0 - 0004,发送/接收转换时间(TATMT).................................... ................................ 2-1S - 0 - 0005,最小反馈采集时间(T4min )..................................... ............................ 2-2S - 0 - 0006,在传输开始时间(T1)..................................... ......................................... 2-2S - 0 - 0007,反馈收购启动时间(甲状腺素)..................................... .................................. 2-2S - 0 - 0008,命令的有效时间(T3)的...................................... ................................................. 2-3S - 0 - 0009,开始处理主数据电报...................................... ........................... 2-3S - 0 - 0010,长度主数据电报....................................... ............................................ 2-3S - 0 - 0011,1级诊断......................................... .................................................. ........... 2-3S - 0 - 0012,第2类诊断......................................... .................................................. ........... 2-4S - 0 - 0013,3级诊断......................................... .................................................. ........... 2-5S - 0 - 0014,接口状态.......................................... .................................................. ................. 2-6S - 0 - 0015电类型参数......................................... .................................................. .. 2-7S - 0 - 0016,自定义放大器电报配置清单....................................... ......................... 2-8S - 0 - 0017,国际化域名列表,所有业务数据列表..................................... ..................... .. 2-8S - 0 - 0018,国际化域名列表,对运行数据的CP2名单.................................... ............................... 2-8 S - 0 - 0019,国际化域名列表,为CP3运行数据清单.................................... ................................... 2-8 S - 0 - 0021,国际化域名列表,为商业无效运算数据列表。
最新如何使用Drivetop来设置IndraDrive.(力士乐资料)

设置菜单选项----概述
BRCS/BRC; Danny.c.shen*
7
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
设置菜单选项----轴名的设置
BRCS/BRC; Danny.c.shen*
8
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
长 的 时 间 隧 道,袅
用Drivetop来设置IndraDrive.(力nny.c.shen*
2
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
驱动器功能----总线的配置2
BRCS/BRC; Danny.c.shen*
12
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
博世力士乐使用说明书、
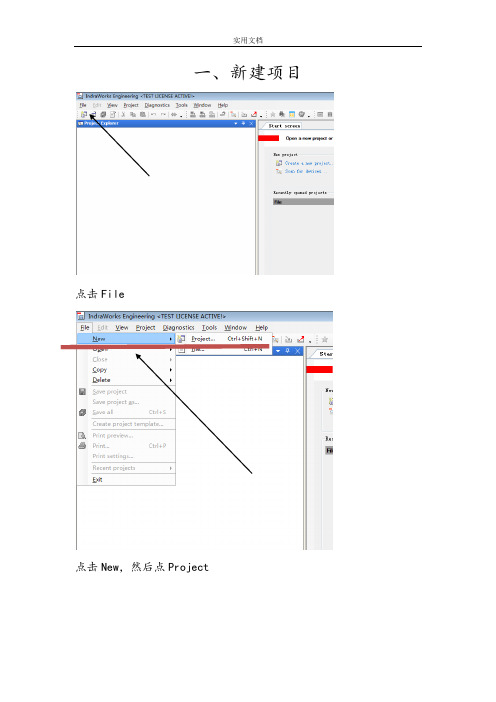
一、新建项目点击File点击New,然后点Project这里输入选14V16 文件名都选完之后单机OK二、组态设备右键Project然后点击ADD点击ADD后,选IndraMotion MLC,之后选我圈的这个单机NEXT注意这个IP地址一定要改成192.168.1.1然后单击NEXT选LD,梯形图,之后点击NEXT一直点击NEXT,最后FINISH右击S20_I_O后点击ADD点击S20-DI-16/1然后点ADD,用此方法依次添加S20-DI-16/1,S20-DO-8/2-2A,S20-AI16-AO2-SSI2,全部添加完毕后点Close双击打开点开后选+/-10V,然后那AnalogOutput2-Outputrange改为+/-10A双击打开LibraryManager点击Add library添加库文件在上面输入RAMP_INT,然后点击RAMP_INT点击OK双击PlcProg(PRG)进入编程页面三、plc编程一般指令所有PLC都一样,我在这里就介绍下这个PLC与别的PLC不同的。
1、PLC的计时器与计数器地址不用自己写,系统自动分配,只需要注意地址不重复。
2、关于中间变量,可以选择分配M区或者直接定义变量名,就可以使用。
3、上升沿下降沿,可以使用R-TRIG和N-TRIG,代替上升沿和下降沿也可以先插入一个常开触点,之后再右击Edge Detection,第一次切换为上升沿,第二次点击切换为下降沿,再次点击变回常开触点4、斜坡插入斜坡指令插入空指令框在线圈位置输入RAMP_INTIN目标值 ASCEND上坡时间 DESCEND下坡时间 TIMEBSASE斜坡时基RESET接通时OUT保持不变 OUT为实际输出值。
力士乐数控说明书
力士乐数控说明书一、引言力士乐数控是一种先进的数控设备,具有高精度、高效率、稳定性好等特点,广泛应用于各种加工行业。
本说明书将对力士乐数控的使用方法、操作流程、常见故障及解决方法等进行详细介绍,以帮助用户更好地使用该设备。
二、产品概述力士乐数控是一种采用先进的数控技术制造的设备,可以实现对工件的自动加工。
它采用先进的计算机控制系统,通过编程控制工具路径的运动,实现对工件的精确加工。
该设备具有高精度、高效率、稳定性好等特点,能够满足各种加工需求。
三、使用方法1. 设备开机准备在使用力士乐数控之前,首先需要进行设备开机准备工作。
确保设备的电源正常连接,并检查各个部件是否处于正常工作状态。
同时,还需要准备好加工所需的刀具、夹具等辅助工具。
2. 编写加工程序力士乐数控的加工过程是通过编写加工程序来实现的。
用户需要根据加工需求,编写相应的加工程序。
在编写程序时,需要注意语法的正确性和程序的逻辑性,以确保加工过程的准确性和稳定性。
3. 设备操作设备操作是使用力士乐数控的关键环节。
用户需要按照设备的操作流程进行操作,包括开机、设定坐标系、设定刀具补偿、设定加工参数等步骤。
在操作过程中,需要仔细阅读设备的操作手册,按照要求进行操作,确保操作的正确性和安全性。
4. 加工过程监控在加工过程中,用户需要对加工过程进行监控,以确保加工质量和效率。
用户可以通过设备的显示屏监控加工进度和工件状态,及时发现问题并进行调整。
四、常见故障及解决方法1. 加工精度不高:可能是由于刀具磨损导致的,此时需要更换刀具;也可能是由于加工程序有误,需要重新编写加工程序。
2. 设备运行不稳定:可能是由于设备的电源供应不稳定,此时需要检查电源连接是否正常;也可能是设备内部部件损坏,需要联系售后人员进行维修。
3. 程序运行错误:可能是由于程序编写有误,需要检查程序语法和逻辑性;也可能是由于设备的存储空间不足,此时需要清理存储空间或增加存储容量。
五、注意事项1. 在使用力士乐数控之前,需要仔细阅读设备的操作手册,并按照要求进行操作。
力士乐驱动器调试指南
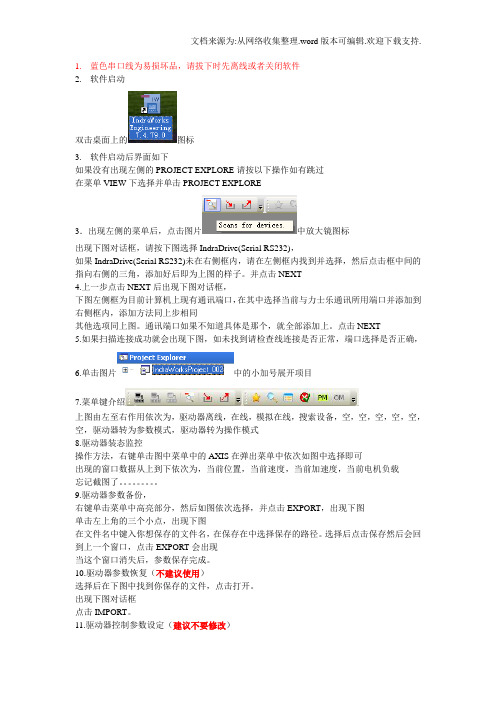
1.蓝色串口线为易损坏品,请拔下时先离线或者关闭软件2.软件启动双击桌面上的图标3.软件启动后界面如下如果没有出现左侧的PROJECT EXPLORE请按以下操作如有跳过在菜单VIEW下选择并单击PROJECT EXPLORE3.出现左侧的菜单后,点击图片中放大镜图标出现下图对话框,请按下图选择IndraDrive(Serial RS232),如果IndraDrive(Serial RS232)未在右侧框内,请在左侧框内找到并选择,然后点击框中间的指向右侧的三角,添加好后即为上图的样子。
并点击NEXT4.上一步点击NEXT后出现下图对话框,下图左侧框为目前计算机上现有通讯端口,在其中选择当前与力士乐通讯所用端口并添加到右侧框内,添加方法同上步相同其他选项同上图。
通讯端口如果不知道具体是那个,就全部添加上。
点击NEXT5.如果扫描连接成功就会出现下图,如未找到请检查线连接是否正常,端口选择是否正确,6.单击图片中的小加号展开项目7.菜单键介绍上图由左至右作用依次为,驱动器离线,在线,模拟在线,搜索设备,空,空,空,空,空,空,驱动器转为参数模式,驱动器转为操作模式8.驱动器装态监控操作方法,右键单击图中菜单中的AXIS在弹出菜单中依次如图中选择即可出现的窗口数据从上到下依次为,当前位置,当前速度,当前加速度,当前电机负载忘记截图了。
9.驱动器参数备份,右键单击菜单中高亮部分,然后如图依次选择,并点击EXPORT,出现下图单击左上角的三个小点,出现下图在文件名中键入你想保存的文件名,在保存在中选择保存的路径。
选择后点击保存然后会回到上一个窗口,点击EXPORT会出现当这个窗口消失后,参数保存完成。
10.驱动器参数恢复(不建议使用)选择后在下图中找到你保存的文件,点击打开。
出现下图对话框点击IMPORT。
11.驱动器控制参数设定(建议不要修改)MASTER COMMUNICATION ADDRESS 驱动器通讯地址BAUDRATE 通讯波特率CYCLE TIME 循环时间LENGTH OF CYCLE REAL TIME CHANNEL 输入字字长LENGTH OF CYCLE COMMAND CHANNE 输出字字长P4078驱动器状态字,S0051位置反馈,S0040速度反馈P4077驱动器控制字,S0282位置命令,S0259速度命令12.轴类型,即转向的修改双击菜单中的SCALING/UNITS 右上的圈内从上到下依次为,转动轴(主轴),直线轴(进给)右下的圈内改变YES,NO即可改变电机转向13.螺距,传动比,最大行程范围设定双击MECHANICAL GEAR ,右侧圈内从上到下依次为,最大行程,螺距,输出齿数,输入齿数14.操作模式改变双击OPERATING,点击下拉键,红色框内为欧三项目所用的操作模式,道依茨的DKM029也是这种方法,欧三的DK093以及道依茨项目的其他机床使用的都是高亮的POSITIONING BLOCK MODE LAGESS ENCODER 1使用第一种方法的各工位位置在PLC程序中修改,第二种方法的需要在右上角红框内的CONFIGURATION中修改,并在程序中找是否有路点,有的也需要修改。
力士乐驱动器使用说明教学文案

力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
SGDSAA驱动器说明书手册
S G D S A A驱动器说明书手册Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】S G D7S-120A00A驱动器说明书手册伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
中文名伺服电机外文名 Servo motor 类型设备使用场合自动控制系统目录1 工作原理2 发展历史3 选型比较4 调试方法5 性能比较6 选型计算7 制动方式8 注意事项9 特点对比10 使用范围11 主要作用12 优点工作原理编辑1、伺服系统(servo mechanism)是使物体的位置、方位、伺服电机状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
直流伺服电机分为有刷和无刷电机。
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。
因此它可以用于对成本敏感的普通工业和民用场合。
博世力士乐使用说明、
一、新建项目点击File点击New,然后点Project这里输入选14V16 文件名都选完之后单机OK二、组态设备右键Project然后点击ADD点击ADD后,选IndraMotion MLC,之后选我圈的这个单机NEXT注意这个IP地址一定要改成192.168.1.1然后单击NEXT选LD,梯形图,之后点击NEXT一直点击NEXT,最后FINISH右击S20_I_O后点击ADD点击S20-DI-16/1然后点ADD,用此方法依次添加S20-DI-16/1,S20-DO-8/2-2A,S20-AI16-AO2-SSI2,全部添加完毕后点Close双击打开点开后选+/-10V,然后那AnalogOutput2-Outputrange改为+/-10A双击打开LibraryManager点击Add library添加库文件在上面输入RAMP_INT,然后点击RAMP_INT点击OK双击PlcProg(PRG)进入编程页面三、plc编程一般指令所有PLC都一样,我在这里就介绍下这个PLC与别的PLC不同的。
1、PLC的计时器与计数器地址不用自己写,系统自动分配,只需要注意地址不重复。
2、关于中间变量,可以选择分配M区或者直接定义变量名,就可以使用。
3、上升沿下降沿,可以使用R-TRIG和N-TRIG,代替上升沿和下降沿也可以先插入一个常开触点,之后再右击Edge Detection,第一次切换为上升沿,第二次点击切换为下降沿,再次点击变回常开触点4、斜坡插入斜坡指令插入空指令框在线圈位置输入RAMP_INTIN目标值ASCEND上坡时间DESCEND下坡时间TIMEBSASE斜坡时基RESET接通时OUT保持不变OUT为实际输出值。
中文力士乐03系列DKC伺服驱动器参数手册
前言
本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同
行在不急需时参考。
在本说明书的后半部分,附有英文
原版说明书,如遇到不能理解之词汇,读者可以再次翻
译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中
文说明书网上基本没有。
779K于2010年11月15日22时30分
德国力士乐伺服驱动器参数说明书
ECODRIVE03
设备一般自动化
本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999
传输,以及本文件复制,商业
使用或将其内容不得沟通无
明确的书面许可。
违反这些规定将要求
赔偿。
为实施专利或者发行版权所有
注册外观设计。
(德国工业标准34-1)
有效期保留所有权利就这个文件的内容
和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885
部完(OS/TH)
注意:本文件印在无氯漂白纸。
总结文件 - 概述。
中文力士乐03系列DKC伺服驱动器参数手册
前言本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同行在不急需时参考。
在本说明书的后半部分,附有英文原版说明书,如遇到不能理解之词汇,读者可以再次翻译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中文说明书网上基本没有。
779K于2010年11月15日22时30分德国力士乐伺服驱动器参数说明书ECODRIVE03设备一般自动化本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999传输,以及本文件复制,商业使用或将其内容不得沟通无明确的书面许可。
违反这些规定将要求赔偿。
为实施专利或者发行版权所有注册外观设计。
(德国工业标准34-1)有效期保留所有权利就这个文件的内容和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885部完(OS/TH)注意:本文件印在无氯漂白纸。
总结文件 - 概述内容1一般资料1-1使用本手册............................................... ................................ 1-1定义................................................. ............................................ 1-22月2日至1日标准参数S - 0 - 0001,NC的周期时间(TNcyc )...................................... ................. 2-1S - 0 - 0002,SERCOS的周期时间(Tscyc )...................................... ..................................... 2-1S - 0 - 0003,最小的AT发送起始时间(T1min)....................... 2-1S - 0 - 0004,发送/接收转换时间(TATMT).................................... ................................ 2-1S - 0 - 0005,最小反馈采集时间(T4min )..................................... ............................ 2-2S - 0 - 0006,在传输开始时间(T1)..................................... ......................................... 2-2S - 0 - 0007,反馈收购启动时间(甲状腺素)..................................... .................................. 2-2S - 0 - 0008,命令的有效时间(T3)的...................................... ................................................. 2-3S - 0 - 0009,开始处理主数据电报...................................... ........................... 2-3S - 0 - 0010,长度主数据电报....................................... ............................................ 2-3S - 0 - 0011,1级诊断......................................... .................................................. ........... 2-3S - 0 - 0012,第2类诊断......................................... .................................................. ........... 2-4S - 0 - 0013,3级诊断......................................... .................................................. ........... 2-5S - 0 - 0014,接口状态.......................................... .................................................. ................. 2-6S - 0 - 0015电类型参数......................................... .................................................. .. 2-7S - 0 - 0016,自定义放大器电报配置清单....................................... ......................... 2-8S - 0 - 0017,国际化域名列表,所有业务数据列表..................................... ..................... .. 2-8S - 0 - 0018,国际化域名列表,对运行数据的CP2名单.................................... ............................... 2-8 S - 0 - 0019,国际化域名列表,为CP3运行数据清单.................................... ................................... 2-8 S - 0 - 0021,国际化域名列表,为商业无效运算数据列表。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
力士乐驱动器使用说明书
本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用
1.MLC04v16软件的安装
安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,
⏹双击setup.exe进行安装,如图所示选择英文后,点Next
⏹按如图所示选择,点Next。
⏹点击Next
.
⏹点击Next
⏹选择接受,后点击Next
⏹输入名称,点击Next
⏹选择安装目录,然后点击Next
⏹点Install
⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:
⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作
⏹打开软件
●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序
->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用
●工程的使用
如下图
点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备
点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机
打开工程后变为
点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口
点Next后自动寻找设备。
未找到设备则弹出下面创库
示波器功能
点Diagnostics下拉菜单,点击Oscilloscope
下图所示为示波器窗口。
采集时间配置:
点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数
Time period:每10ms采集一个点
Recording time:前面两项相乘得出的总采样时间。
触发方式配置:
点击上图右下角的Configure后弹出如下窗口:
Manual trigger 为手动触发。
PreTrigger 为记录触发前数据长度的百分数,触发后数据长度的百分数。
自动触发:
点击Select选择触发源
选择后如下图所示
== 当实际值Actual value=Trigger Value时触发Both edges 当Actual value>Trigger Value或Actual value<Trigger Value时产生的上升沿和下降沿触发。
Edge下降沿触发
Edge上升沿触发
采集配置
点击Signals后弹出如下窗口,选择要采集的信号
手动触发数据采集时先点Start再点Trigger。
●
3.
二、参数配置
1.DP配置
⏹Master communication address: 2 从站地址。
⏹Baudrate: 波特率由主站决定
⏹Cycle time: 2000 us 通讯周期
⏹Watchdog time: 12ms 通讯看门狗时间
⏹Length of parameter channel 0 byte 参数通道长度
⏹Length of cyclic real-time channel 20byte 实时数据通道(驱动器向
PLC一次可以写20个字节)
⏹Length of cyclic command channel 10byte 命令数据通道(PLC向驱动器一
次可写10个字节)
2.轴设定
⏹Scaling type: 选择linear直线轴。
⏹Position data format:absolute绝对位置
⏹Maxinum travel range l: 360 mm 最大行程
⏹Feed constant k: 16 mm/rev 导程
⏹Input revolutions of load gear n1 : 1 输入比例⏹Output revolutions of load gear n2 : 1 输出比例
3.设定原点
⏹Clear position status: 清除当前位置
⏹Set absolute measuring: 设定位置
4.主轴监视
⏹Velocity command value 60RPM。
监视当前设定频率
⏹Target Position: 270 deg 监视当前电机所处正弦的相位
⏹Master axis format converter:P-0-0758:Virtual master axis,actual position
value。
主轴模式为虚拟主轴,实际位置。
5.MLD配置
⏹PLC has permanent control over the drive:驱动器具备PLC功能(可编程逻辑控
制)。
⏹Motion errors at FB do not trigger any(axis) errors :在FB内发生的motion
错误不触发轴错误
⏹Axisdata structure supported 支持程序内调用轴数据
6.电阻设置
⏹Nom,braking resistance 160ohm 制动电阻160欧姆⏹Braking resistor contin 50W 制动电阻功率50W ⏹Max,regener power tobe absorbed: 1KWS
7.参数保存
修改完参数后必须按如图操作,否则不能保存参数。
8.下载凸轮表5,6,7,8
凸轮表5,6,7,8不能直接下载,需用如下方法下载 首先按如图所示保存为外部文件
其次再按图所示导入凸轮表
再上传凸轮表会如下图:
9.IO配置
⏹1,2脚位电源输入,在程序内部可读P-0-0861的第0位。
⏹3,4,5,6,7为数字量输入,分别为P-0-1394的第0,1,2,3,4位。
并可通过IB8
访问,同样是0,1,2,3,4位。
⏹1,2为模拟量输出。
⏹4,5为模拟量输入。
⏹6,7,8脚位数字量输入
⏹9为数字量输出
⏹如图所示配置,为把实际电流通过模拟量送出。
对应关系为0~5V对应-70A~70A。
每伏对应28A。
⏹如图所示配置为采集0~10V信号,并映射到IB10,可用程序访问IB10。
10.固件版本更新
⏹首先打开FirmWare management
⏹选择本地FirmWare后显示在左侧,右侧为当前驱动器内的的FirmWare
⏹点击DownLoad 后下载新固件。
三.PID调节
⏹位置环
位置环增益:提高此参数可以提高位置整定的速度。
位置环前馈:提高此参数可补偿位置环的变化。
⏹速度环
速度环增益KP:提高此参数值,提高速度环强度,提高调节速度。
速度环积分时间:提高此参数值,可较少速度波动,但是会降低响应时间。