力士乐驱动器使用说明
中文力士乐03系列DKC伺服驱动器参数手册
前言本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同行在不急需时参考。
在本说明书的后半部分,附有英文原版说明书,如遇到不能理解之词汇,读者可以再次翻译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中文说明书网上基本没有。
779K于2010年11月15日22时30分德国力士乐伺服驱动器参数说明书ECODRIVE03设备一般自动化本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999传输,以及本文件复制,商业使用或将其内容不得沟通无明确的书面许可。
违反这些规定将要求赔偿。
为实施专利或者发行版权所有注册外观设计。
(德国工业标准34-1)有效期保留所有权利就这个文件的内容和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885部完(OS/TH)注意:本文件印在无氯漂白纸。
总结文件 - 概述内容1一般资料1-1使用本手册............................................... ................................ 1-1定义................................................. ............................................ 1-22月2日至1日标准参数S - 0 - 0001,NC的周期时间(TNcyc )...................................... ................. 2-1S - 0 - 0002,SERCOS的周期时间(Tscyc )...................................... ..................................... 2-1S - 0 - 0003,最小的AT发送起始时间(T1min)....................... 2-1S - 0 - 0004,发送/接收转换时间(TATMT).................................... ................................ 2-1S - 0 - 0005,最小反馈采集时间(T4min )..................................... ............................ 2-2S - 0 - 0006,在传输开始时间(T1)..................................... ......................................... 2-2S - 0 - 0007,反馈收购启动时间(甲状腺素)..................................... .................................. 2-2S - 0 - 0008,命令的有效时间(T3)的...................................... ................................................. 2-3S - 0 - 0009,开始处理主数据电报...................................... ........................... 2-3S - 0 - 0010,长度主数据电报....................................... ............................................ 2-3S - 0 - 0011,1级诊断......................................... .................................................. ........... 2-3S - 0 - 0012,第2类诊断......................................... .................................................. ........... 2-4S - 0 - 0013,3级诊断......................................... .................................................. ........... 2-5S - 0 - 0014,接口状态.......................................... .................................................. ................. 2-6S - 0 - 0015电类型参数......................................... .................................................. .. 2-7S - 0 - 0016,自定义放大器电报配置清单....................................... ......................... 2-8S - 0 - 0017,国际化域名列表,所有业务数据列表..................................... ..................... .. 2-8S - 0 - 0018,国际化域名列表,对运行数据的CP2名单.................................... ............................... 2-8 S - 0 - 0019,国际化域名列表,为CP3运行数据清单.................................... ................................... 2-8 S - 0 - 0021,国际化域名列表,为商业无效运算数据列表。
最新如何使用Drivetop来设置IndraDrive.(力士乐资料)

设置菜单选项----概述
BRCS/BRC; Danny.c.shen*
7
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
设置菜单选项----轴名的设置
BRCS/BRC; Danny.c.shen*
8
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
长 的 时 间 隧 道,袅
用Drivetop来设置IndraDrive.(力nny.c.shen*
2
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
驱动器功能----总线的配置2
BRCS/BRC; Danny.c.shen*
12
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
Rexroth (博世力士乐)EFC 3600 简易手册

目录目录页数1 结构安装 (1)1.1 目视检查 (1)1.2 环境条件 (1)1.3 安装条件 (2)1.4 尺寸 (3)2 电气安装 (6)2.1 电缆规格 (6)2.2 主回路端子 (8)2.3 控制信号端口的连接 (9)3 设置参数 (13)3.1 操作面板 (13)3.2 起动 (14)3.3 操作指导 (15)3.4 参数列表 (16)4 故障指示 (36)结构安装1 结构安装1.1 目视检查打开变频器包装后,请进行目视检查。
检查以下项目:●供货型号是否正确●设备是否有损坏●运输过程中是否造成机箱划痕、裂痕或凹痕如果发现任何上述问题,请联系Bosch Rexroth分销商。
1.2 环境条件为了保证变频器正常运行,变频器的安装环境必须符合下表所列数据。
①:参见《使用手册》“10.3:电气参数的降额”。
表格 1-1: 环境条件1.3 安装条件变频器根据额定值的不同,分为不同的外型尺寸。
为了达到理想的散热效果,必须保证下图所示变频器与相邻物品之间上、下的最小安装距离。
插图 1-1:安装条件●上图所示变频器为机箱1至3。
上述最小安装距离适用于机箱1至机箱4。
●必须垂直安装变频器。
●如果将一台变频器安装在另外一台之上,确保变频器进气口温度不超过上限值(参见 第 1.2 章 "环境条件" 第 1 页 )。
如果超过上限,建议在变频器之间安装隔板,防止上升的热空气被吸入上面的变频器。
Bosch Rexroth AG 结构安装1.4 尺寸表格 1-2: EFC 3600尺寸①:完整型号(类型编码)为:EFC3600-xKxx-xPx-xDA-7P-NNNN ,参见《使用手册》17.3章附录三:类型编码。
②:安装EFC 3600机箱1、2、3,需要2颗螺钉。
③:安装EFC 3600机箱4,需要4颗螺钉。
Bosch Rexroth AG结构安装Bosch Rexroth AG 结构安装插图 1-2: 机箱1、2、3Bosch Rexroth AG结构安装插图 1-3: 机箱42 电气安装2.1 电缆规格2.1.1 主回路配线变频器根据额定值的不同,分为不同的外型尺寸。
博世力士乐使用说明书、
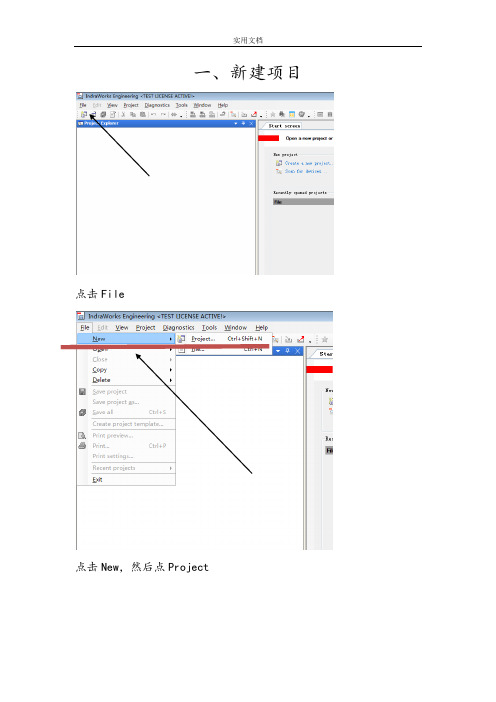
一、新建项目点击File点击New,然后点Project这里输入选14V16 文件名都选完之后单机OK二、组态设备右键Project然后点击ADD点击ADD后,选IndraMotion MLC,之后选我圈的这个单机NEXT注意这个IP地址一定要改成192.168.1.1然后单击NEXT选LD,梯形图,之后点击NEXT一直点击NEXT,最后FINISH右击S20_I_O后点击ADD点击S20-DI-16/1然后点ADD,用此方法依次添加S20-DI-16/1,S20-DO-8/2-2A,S20-AI16-AO2-SSI2,全部添加完毕后点Close双击打开点开后选+/-10V,然后那AnalogOutput2-Outputrange改为+/-10A双击打开LibraryManager点击Add library添加库文件在上面输入RAMP_INT,然后点击RAMP_INT点击OK双击PlcProg(PRG)进入编程页面三、plc编程一般指令所有PLC都一样,我在这里就介绍下这个PLC与别的PLC不同的。
1、PLC的计时器与计数器地址不用自己写,系统自动分配,只需要注意地址不重复。
2、关于中间变量,可以选择分配M区或者直接定义变量名,就可以使用。
3、上升沿下降沿,可以使用R-TRIG和N-TRIG,代替上升沿和下降沿也可以先插入一个常开触点,之后再右击Edge Detection,第一次切换为上升沿,第二次点击切换为下降沿,再次点击变回常开触点4、斜坡插入斜坡指令插入空指令框在线圈位置输入RAMP_INTIN目标值 ASCEND上坡时间 DESCEND下坡时间 TIMEBSASE斜坡时基RESET接通时OUT保持不变 OUT为实际输出值。
力士乐数控说明书
力士乐数控说明书一、引言力士乐数控是一种先进的数控设备,具有高精度、高效率、稳定性好等特点,广泛应用于各种加工行业。
本说明书将对力士乐数控的使用方法、操作流程、常见故障及解决方法等进行详细介绍,以帮助用户更好地使用该设备。
二、产品概述力士乐数控是一种采用先进的数控技术制造的设备,可以实现对工件的自动加工。
它采用先进的计算机控制系统,通过编程控制工具路径的运动,实现对工件的精确加工。
该设备具有高精度、高效率、稳定性好等特点,能够满足各种加工需求。
三、使用方法1. 设备开机准备在使用力士乐数控之前,首先需要进行设备开机准备工作。
确保设备的电源正常连接,并检查各个部件是否处于正常工作状态。
同时,还需要准备好加工所需的刀具、夹具等辅助工具。
2. 编写加工程序力士乐数控的加工过程是通过编写加工程序来实现的。
用户需要根据加工需求,编写相应的加工程序。
在编写程序时,需要注意语法的正确性和程序的逻辑性,以确保加工过程的准确性和稳定性。
3. 设备操作设备操作是使用力士乐数控的关键环节。
用户需要按照设备的操作流程进行操作,包括开机、设定坐标系、设定刀具补偿、设定加工参数等步骤。
在操作过程中,需要仔细阅读设备的操作手册,按照要求进行操作,确保操作的正确性和安全性。
4. 加工过程监控在加工过程中,用户需要对加工过程进行监控,以确保加工质量和效率。
用户可以通过设备的显示屏监控加工进度和工件状态,及时发现问题并进行调整。
四、常见故障及解决方法1. 加工精度不高:可能是由于刀具磨损导致的,此时需要更换刀具;也可能是由于加工程序有误,需要重新编写加工程序。
2. 设备运行不稳定:可能是由于设备的电源供应不稳定,此时需要检查电源连接是否正常;也可能是设备内部部件损坏,需要联系售后人员进行维修。
3. 程序运行错误:可能是由于程序编写有误,需要检查程序语法和逻辑性;也可能是由于设备的存储空间不足,此时需要清理存储空间或增加存储容量。
五、注意事项1. 在使用力士乐数控之前,需要仔细阅读设备的操作手册,并按照要求进行操作。
力士乐驱动器调试指南
1.蓝色串口线为易损坏品,请拔下时先离线或者关闭软件2.软件启动双击桌面上的图标3.软件启动后界面如下如果没有出现左侧的PROJECT EXPLORE请按以下操作如有跳过在菜单VIEW下选择并单击PROJECT EXPLORE3.出现左侧的菜单后,点击图片中放大镜图标出现下图对话框,请按下图选择IndraDrive(Serial RS232),如果IndraDrive(Serial RS232)未在右侧框内,请在左侧框内找到并选择,然后点击框中间的指向右侧的三角,添加好后即为上图的样子。
并点击NEXT4.上一步点击NEXT后出现下图对话框,下图左侧框为目前计算机上现有通讯端口,在其中选择当前与力士乐通讯所用端口并添加到右侧框内,添加方法同上步相同其他选项同上图。
通讯端口如果不知道具体是那个,就全部添加上。
点击NEXT5.如果扫描连接成功就会出现下图,如未找到请检查线连接是否正常,端口选择是否正确,6.单击图片中的小加号展开项目7.菜单键介绍上图由左至右作用依次为,驱动器离线,在线,模拟在线,搜索设备,空,空,空,空,空,空,驱动器转为参数模式,驱动器转为操作模式8.驱动器装态监控操作方法,右键单击图中菜单中的AXIS在弹出菜单中依次如图中选择即可出现的窗口数据从上到下依次为,当前位置,当前速度,当前加速度,当前电机负载忘记截图了。
9.驱动器参数备份,右键单击菜单中高亮部分,然后如图依次选择,并点击EXPORT,出现下图单击左上角的三个小点,出现下图在文件名中键入你想保存的文件名,在保存在中选择保存的路径。
选择后点击保存然后会回到上一个窗口,点击EXPORT会出现当这个窗口消失后,参数保存完成。
10.驱动器参数恢复(不建议使用)选择后在下图中找到你保存的文件,点击打开。
出现下图对话框点击IMPORT。
11.驱动器控制参数设定(建议不要修改)MASTER COMMUNICATION ADDRESS 驱动器通讯地址BAUDRATE 通讯波特率CYCLE TIME 循环时间LENGTH OF CYCLE REAL TIME CHANNEL 输入字字长LENGTH OF CYCLE COMMAND CHANNE 输出字字长P4078驱动器状态字,S0051位置反馈,S0040速度反馈P4077驱动器控制字,S0282位置命令,S0259速度命令12.轴类型,即转向的修改双击菜单中的SCALING/UNITS 右上的圈内从上到下依次为,转动轴(主轴),直线轴(进给)右下的圈内改变YES,NO即可改变电机转向13.螺距,传动比,最大行程范围设定双击MECHANICAL GEAR ,右侧圈内从上到下依次为,最大行程,螺距,输出齿数,输入齿数14.操作模式改变双击OPERATING,点击下拉键,红色框内为欧三项目所用的操作模式,道依茨的DKM029也是这种方法,欧三的DK093以及道依茨项目的其他机床使用的都是高亮的POSITIONING BLOCK MODE LAGESS ENCODER 1使用第一种方法的各工位位置在PLC程序中修改,第二种方法的需要在右上角红框内的CONFIGURATION中修改,并在程序中找是否有路点,有的也需要修改。
力士乐驱动器使用说明教学文案
力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
SGDSAA驱动器说明书手册
S G D S A A驱动器说明书手册Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】S G D7S-120A00A驱动器说明书手册伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
中文名伺服电机外文名 Servo motor 类型设备使用场合自动控制系统目录1 工作原理2 发展历史3 选型比较4 调试方法5 性能比较6 选型计算7 制动方式8 注意事项9 特点对比10 使用范围11 主要作用12 优点工作原理编辑1、伺服系统(servo mechanism)是使物体的位置、方位、伺服电机状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
直流伺服电机分为有刷和无刷电机。
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。
因此它可以用于对成本敏感的普通工业和民用场合。
博世力士乐使用说明、
一、新建项目点击File点击New,然后点Project这里输入选14V16 文件名都选完之后单机OK二、组态设备右键Project然后点击ADD点击ADD后,选IndraMotion MLC,之后选我圈的这个单机NEXT注意这个IP地址一定要改成192.168.1.1然后单击NEXT选LD,梯形图,之后点击NEXT一直点击NEXT,最后FINISH右击S20_I_O后点击ADD点击S20-DI-16/1然后点ADD,用此方法依次添加S20-DI-16/1,S20-DO-8/2-2A,S20-AI16-AO2-SSI2,全部添加完毕后点Close双击打开点开后选+/-10V,然后那AnalogOutput2-Outputrange改为+/-10A双击打开LibraryManager点击Add library添加库文件在上面输入RAMP_INT,然后点击RAMP_INT点击OK双击PlcProg(PRG)进入编程页面三、plc编程一般指令所有PLC都一样,我在这里就介绍下这个PLC与别的PLC不同的。
1、PLC的计时器与计数器地址不用自己写,系统自动分配,只需要注意地址不重复。
2、关于中间变量,可以选择分配M区或者直接定义变量名,就可以使用。
3、上升沿下降沿,可以使用R-TRIG和N-TRIG,代替上升沿和下降沿也可以先插入一个常开触点,之后再右击Edge Detection,第一次切换为上升沿,第二次点击切换为下降沿,再次点击变回常开触点4、斜坡插入斜坡指令插入空指令框在线圈位置输入RAMP_INTIN目标值ASCEND上坡时间DESCEND下坡时间TIMEBSASE斜坡时基RESET接通时OUT保持不变OUT为实际输出值。
中文力士乐03系列DKC伺服驱动器参数手册
前言
本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同
行在不急需时参考。
在本说明书的后半部分,附有英文
原版说明书,如遇到不能理解之词汇,读者可以再次翻
译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中
文说明书网上基本没有。
779K于2010年11月15日22时30分
德国力士乐伺服驱动器参数说明书
ECODRIVE03
设备一般自动化
本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999
传输,以及本文件复制,商业
使用或将其内容不得沟通无
明确的书面许可。
违反这些规定将要求
赔偿。
为实施专利或者发行版权所有
注册外观设计。
(德国工业标准34-1)
有效期保留所有权利就这个文件的内容
和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885
部完(OS/TH)
注意:本文件印在无氯漂白纸。
总结文件 - 概述。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文档来源为:从网络收集整理.word版本可编辑.欢迎下载支持.
力士乐驱动器参数调试说明
本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用
1.MLC04v16软件的安装
安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,
⏹双击setup.exe进行安装,如图所示选择英文后,点Next
⏹按如图所示选择,点Next。
⏹点击Next
⏹点击Next
⏹选择接受,后点击Next
⏹输入名称,点击Next
⏹选择安装目录,然后点击Next
⏹点Install
⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:
⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作
⏹打开软件
●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->
⏹软件使用
●工程的使用
如下图
点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备
点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
●与伺服启动器联机
打开工程后变为
点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口
点Next后自动寻找设备。
未找到设备则弹出下面创库
●示波器功能
点Diagnostics下拉菜单,点击Oscilloscope
下图所示为示波器窗口。
采集时间配置:
文档来源为:从网络收集整理.word版本可编辑.欢迎下载支持.
点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数
Time period:每10ms采集一个点
Recording time:前面两项相乘得出的总采样时间。
触发方式配置:
点击上图右下角的Configure后弹出如下窗口:
Manual trigger 为手动触发。
PreTrigger 为记录触发前数据长度的百分数,触发后数据长度的百分数。
自动触发:
点击Select选择触发源
选择后如下图所示
== 当实际值Actual value=Trigger Value时触发
Both edges 当Actual value>Trigger Value或Actual value<Trigger Value时产生的上升
沿和下降沿触发。
Edge下降沿触发
Edge上升沿触发
采集配置
点击Signals后弹出如下窗口,选择要采集的信号
表示示波器软件连接伺服驱动器还是断开连接的操作
手动触发数据采集时先点Start再点Trigger。
二、参数配置
1.DP配置
⏹Master communication address: 2 从站地址。
⏹Baudrate: 波特率由主站决定
⏹Cycle time: 2000 us 通讯周期
⏹Watchdog time: 12ms 通讯看门狗时间
⏹Length of parameter channel 0 byte 参数通道长度
⏹Length of cyclic real-time channel 20byte 实时数据通道(驱动器向PLC一次可以写20个字
节)
⏹Length of cyclic command channel 10byte 命令数据通道(PLC向驱动器一次可写10个字节)
2.轴设定
⏹Scaling type: 选择linear直线轴。
⏹Position data format:absolute绝对位置
⏹Maxinum travel range l: 360 mm 最大行程
⏹Feed constant k: 16 mm/rev 导程
⏹Input revolutions of load gear n1 : 1 输入比例
⏹Output revolutions of load gear n2 : 1 输出比例
3.设定原点
⏹Clear position status: 清除当前位置
⏹Set absolute measuring: 设定位置
4.主轴监视
⏹Velocity command value 60RPM。
监视当前设定频率
⏹Target Position: 270 deg 监视当前电机所处正弦的相位
文档来源为:从网络收集整理.word版本可编辑.欢迎下载支持.
⏹Master axis format converter:P-0-0758:Virtual master axis,actual position value。
主轴模式为虚拟主轴,
实际位置。
5.MLD配置
⏹PLC has permanent control over the drive:驱动器具备PLC功能(可编程逻辑控制)。
⏹Motion errors at FB do not trigger any(axis) errors :在FB内发生的motion错误不触发轴错误
⏹Axisdata structure supported 支持程序内调用轴数据
6.电阻设置
⏹Nom,braking resistance 160ohm 制动电阻160欧姆
⏹Braking resistor contin 50W 制动电阻功率50W
⏹Max,regener power tobe absorbed: 1KWS
7.参数保存
修改完参数后必须按如图操作,否则不能保存参数。
8.下载凸轮表5,6,7,8
凸轮表5,6,7,8不能直接下载,需用如下方法下载
⏹首先按如图所示保存为外部文件
⏹其次再按图所示导入凸轮表
⏹再上传凸轮表会如下图:
9.IO配置
⏹1,2脚位电源输入,在程序内部可读P-0-0861的第0位。
⏹3,4,5,6,7为数字量输入,分别为P-0-1394的第0,1,2,3,4位。
并可通过IB8访问,同样是0,1,2,3,4
位。
⏹1,2为模拟量输出。
⏹4,5为模拟量输入。
⏹6,7,8脚位数字量输入
⏹9为数字量输出
⏹如图所示配置,为把实际电流通过模拟量送出。
对应关系为0~5V对应-70A~70A。
每伏对应28A。
⏹如图所示配置为采集0~10V信号,并映射到IB10,可用程序访问IB10。
10.固件版本更新
⏹首先打开FirmWare management
⏹选择本地FirmWare后显示在左侧,右侧为当前驱动器内的的FirmWare
⏹点击DownLoad 后下载新固件。
三.PID调节
⏹位置环
位置环增益:提高此参数可以提高位置整定的速度。
位置环前馈:提高此参数可补偿位置环的变化。
⏹速度环
速度环增益KP:提高此参数值,提高速度环强度,提高调节速度。
速度环积分时间:提高此参数值,可较少速度波动,但是会降低响应时间。