采用Biss串行通讯的RESOLUTE绝对式光栅
基于BISS协议的编码器接口技术研究及应用
37位 (包括 29位位置数据 +2位状态位 +6位 CRC); 步骤 2:将数据的最 后六位 CRC码 用 “ 000000”
来代替 ; 步骤 3:采用生 成多 项 式 “ 1000011 ” 来除 (模
2.2.3 合理性校验与数据输出模块 尽管使用 FPGA能够成功解决与编码器的 通信问
题 , 并且数据经 过了 CRC环节 的验 证 , 但是 由于 硬
件连接电路中随机干扰而导致的错误数据仍然有可能
不会被校验出来 , 所 以需要进 行数 据的合 理性 判断 ,
收稿日期 :2010 -05 -24 作者简介 :王列 虎 (1984— ), 男 , 硕士 研究 生 , 主 要从 事伺服 系统 、 伺服 驱动 器方 面的研 究 。 电话 : 15989048149,
E-mail:wangliehu@。
· 104·
机床与液压
第 39卷
需要说 明的 是 , 在 控制 信号 的第 二 个上 升 沿 时 , 可 能会产生总线延 , 或者由于编码器的位置信号需要内 部采集 、 转换等过程 , 当编码器忙不能立刻响应主机 的读数请 求 时 , 也可 能 会延 迟响 应 start位 。 在 start 置 `1' 之后 , 则开始数 据位的 传输 , 在 MA的 每一 个时钟上升沿 , SL返回相应的数据位 。
图 1 传感器模式协议波形
1.2 寄存器模式 寄存器模式又分为读和写两种模式 , 读寄存器模
式时数据帧格式如下 :
写寄存器模式时数据帧格式如下 :
寄存器模式协议波形见如图 2所示 , 在控制信号 MA的第一次下降沿之后紧跟着 的低电平 的持续 时间 大于 timeoutSENS时 , 则 系统 采 用寄 存 器 传输 模 式 。 该模式通信波特率相对较低 , 一般正常工作上限波特 率为几百 K。控制信号不但需要提供 时钟信 号 , 还需 要携带寄存器地址 、 寄存器值等信息 , 这是通过不同 的占空比 实现 的 :当占 空比 在 10% ~ 30% (低占 空 比 )时 , 表示数据 0;当占空比在 70% ~ 90% (高占 空比 )时 , 表示数据 1。
绝对式光栅尺工作原理
绝对式光栅尺工作原理朋友,今天咱们来聊聊绝对式光栅尺的工作原理,这可超有趣的呢!你看啊,绝对式光栅尺就像是一把超级精准的小尺子,不过它的测量方式可高级多啦。
它有一个主光栅和一个指示光栅,这俩就像一对好伙伴,总是配合得特别默契。
主光栅上面有好多细密的刻线,这些刻线就像是小格子一样,整整齐齐地排列着。
指示光栅呢,也有类似的刻线。
当光线照到这对光栅上的时候,就会发生一些奇妙的事情哦。
由于刻线的存在,光线就会被分割成一束一束的,就像一群调皮的小光线宝宝被分成了好多小队伍。
有些地方光线叠加在一起变得很亮,这就是干涉相长啦;而有些地方光线互相抵消变得很暗,这就是干涉相消喽。
这一亮一暗的条纹就叫做莫尔条纹。
这个莫尔条纹可神奇了呢。
它有一个特别好玩的特性,就是它的移动方向和光栅尺的移动方向是垂直的。
想象一下,光栅尺就像在一个平面上慢慢地滑动,而莫尔条纹就像是在旁边欢快地跳着舞,而且是横着跳的那种。
而且啊,莫尔条纹还有放大的作用。
光栅尺上的刻线间距可能非常小,但是莫尔条纹的间距就相对大很多啦。
这就好比把那些很微小的移动,通过这个神奇的莫尔条纹给放大了,这样就更容易被检测到呢。
然后呢,在绝对式光栅尺里还有光电探测器这个小机灵鬼。
它就像是一个敏锐的小眼睛,一直盯着莫尔条纹看。
当莫尔条纹移动的时候,光电探测器就能感受到光线强度的变化。
因为莫尔条纹亮暗交替嘛,所以光电探测器接收到的光信号也是一会儿强一会儿弱的。
它就把这个光信号的变化转化成电信号。
这个电信号就像是一种特殊的语言,告诉外面的设备光栅尺到底移动了多少距离。
而且啊,绝对式光栅尺之所以叫“绝对式”,是因为它能直接给出位置信息呢。
不像有些测量工具,还得先有个参考点,然后再慢慢计算相对位置。
它就像是一个很聪明的小助手,不管在什么时候,只要你问它,它就能马上告诉你它所在的精确位置。
就像你问一个很熟悉路的小伙伴“我们现在在哪呀”,它马上就能准确回答你一样。
再说说它的内部构造吧。
光栅尺的工作原理
光栅尺的工作原理光栅尺是一种用于测量和检测物体位置的精密测量仪器,广泛应用于机械加工、自动化控制和精密测量领域。
其工作原理基于光学干涉原理和编码技术,能够实现高精度的位置测量。
光栅尺的主要组成部分包括光源、光栅、检测器和信号处理器。
光源发出一束平行光线照射到光栅上,光栅是由一系列等距的透明和不透明条纹组成的,这些条纹被称为光栅线。
当光线通过光栅时,会发生折射和衍射现象。
光栅尺的工作原理可以分为两种类型:增量式和绝对式。
1. 增量式光栅尺工作原理:增量式光栅尺通过测量光栅线的移动来确定物体的位置。
当物体移动时,光栅线也会相应地移动。
光栅尺上的检测器会接收到经过光栅衍射的光信号,并将其转换为电信号。
信号处理器会对电信号进行处理,计算出物体的位移或位置信息。
2. 绝对式光栅尺工作原理:绝对式光栅尺通过在光栅上编码信息来直接确定物体的位置。
光栅上的每一个光栅线都被编码成独特的二进制码。
检测器接收到经过光栅衍射的光信号后,会将其转换为对应的二进制码。
信号处理器会将二进制码转换为物体的绝对位置信息。
光栅尺的工作原理基于光学干涉原理。
当光线通过光栅时,会发生衍射现象,即光线会在光栅上产生干涉条纹。
这些干涉条纹的形状和间距与光栅的结构参数相关。
通过测量干涉条纹的特征,可以计算出物体的位移或位置信息。
光栅尺的精度受到多个因素的影响,包括光栅线的间距、光源的稳定性、检测器的灵敏度等。
为了提高测量精度,光栅尺通常采用高精度的光栅和稳定的光源,同时配备高分辨率的检测器和精密的信号处理器。
总结起来,光栅尺的工作原理基于光学干涉原理和编码技术,能够实现高精度的位置测量。
通过测量光栅线的移动或解码光栅上的信息,可以确定物体的位移或位置信息。
光栅尺在机械加工、自动化控制和精密测量领域具有重要的应用价值。
采用绝对式直线光栅尺测量圆角度的方法
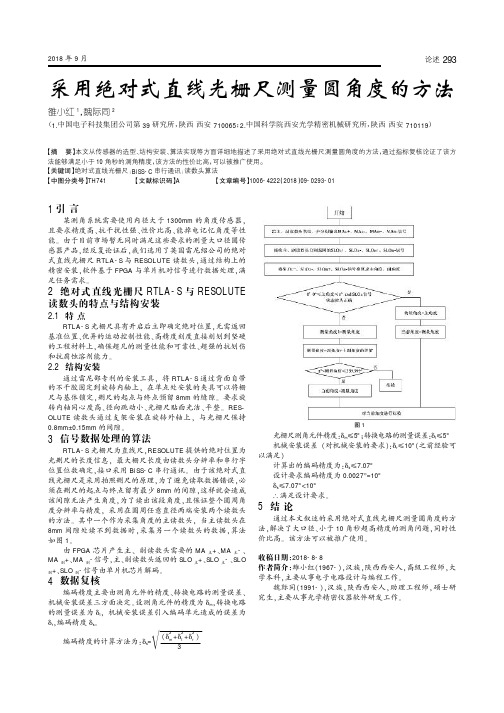
2018年9月采用绝对式直线光栅尺测量圆角度的方法雒小红1,魏际同2(1.中国电子科技集团公司第39研究所,陕西西安710065;2.中国科学院西安光学精密机械研究所,陕西西安710119)【摘要】本文从传感器的选型、结构安装、算法实现等方面详细地描述了采用绝对式直线光栅尺测量圆角度的方法,通过指标复核论证了该方法能够满足小于10角秒的测角精度,该方法的性价比高,可以被推广使用。
【关键词】绝对式直线光栅尺;BiSS-C 串行通讯;读数头算法【中图分类号】TH741【文献标识码】A 【文章编号】1006-4222(2018)09-0293-011引言某测角系统需要使用内径大于1300mm 的角度传感器,且要求精度高、抗干扰性强、性价比高、能掉电记忆角度等性能。
由于目前市场暂无同时满足这些要求的测量大口径圆传感器产品,经反复论证后,我们选用了英国雷尼绍公司的绝对式直线光栅尺RTLA-S 与RESOLUTE 读数头,通过结构上的精密安装,软件基于FPGA 与单片机对信号进行数据处理,满足任务需求。
2绝对式直线光栅尺RTLA-S 与RESOLUTE 读数头的特点与结构安装2.1特点RTLA-S 光栅尺具有开启后立即确定绝对位置,无需返回基准位置、优异的运动控制性能、高精度刻度直接刻划到坚硬的工程材料上,确保超凡的测量性能和可靠性、超强的抗划伤和抗腐蚀溶剂能力。
2.2结构安装通过雷尼邵专利的安装工具,将RTLA-S 通过背面自带的不干胶固定到旋转内轴上,在单点处安装的夹具可以将栅尺与基体锁定,删尺的起点与终点预留8mm 的缝隙。
要求旋转内轴同心度高、径向跳动小、光栅尺贴面光洁、平整。
RES ⁃OLUTE 读数头通过支架安装在旋转外轴上,与光栅尺保持0.8mm ±0.15mm 的间隙。
3信号数据处理的算法RTLA-S 光栅尺为直线尺,RESOLUTE 提供的绝对位置为光删尺的长度信息,最大栅尺长度由读数头分辨率和串行字位置位数确定,接口采用BiSS-C 串行通讯。
基于BISS C模式编码器数据采集及显示系统设计
定 、显 示直观 。实践 证明 :BISS C 编码器采 显系统可 以正确地 与 编 码器 进行 数 据 交换 并 实时 显示 目标 的方 位 值和俯 仰值 ,工作稳 定 ,具 有较强 的工程实 践意义 。
1 编码 器数据接 收及显示设计
1.1 系 统设 计 根据 BISS C协议 的 内容 ,设计 绝对 式 圆光栅 编码
2016年第 4期 总第 348期
文 章编 号 :1004—7182(2016)04—0099—04
导 弹 与 航 天 运 载 技 术
M ISSILES AND SPACE VEHICLES
DOI:10.7654/j.issn.1004.7182.20160425
NO.4 2016 Sum No.348
器 数据 接 收及 显示板 卡 ,采用 DSP+FPGA 的硬件 结 构 模 式 ,编 程 实现 与 圆光栅 之 间 的数据 交 换 ,对接 收 的二进 制码 进行 编译 和 处理 ,以 “度/分/秒 ”形式将 目 标 的方位 值 和 俯 仰值 显 示 在液 晶显 示屏 上[41。如 图 1 所 示 ,BISS C编 码器采 显 系统 主要 包括 圆光栅 编码器 、 数据接收及显示系统和 1个触摸式液晶显示屏 。
ห้องสมุดไป่ตู้
基 于 BISS C模式编码器数据采集及 显示系统设计
王 洪娟 ,邢柏 强 ,刘 岩 ,关正 坤
(首都航 天机械 公司,北京 ,100076)
摘要 :为得到正确的转 台方位值和俯仰值 ,针对 绝对式轴 角栅编码 器设计 了基 于 BISS C模 式的编码 器数据 采集及 显示系
统 。采 用 DSP+FPGA 为核 心的硬件 结构 ,DSP通过 GPIO 实现编码 器数据 的控制和数据接 收并计算 角度值 ;FPGA 实现整体
规格手册_ 采用BiSS 串行通讯的 RESOLUTE_绝对式光栅
规格手册 RESOLUTEਨܔ๕࠼ቆ (BiSS)
绝对式圆光栅
分辨率
RESOLUTE༵ࠃܠዖݴՐ୲Ljᅜፁ࠽ڦݘᆌᆩă ስݴՐ୲ൽਦᇀኟሞ๑ᆩزڦႜၹᅱLjܸᇶ࠼ቆ٫փ၌Lj૩සBiSS 26࿋ݴՐ୲ᆩᇀᆶᇶቆ٫ă BiSS RESOLUTEݴՐ୲ၜǖ 18࿋DŽገ262 144߲ஞ؋ ≈ 4.94௱Dž 26࿋ (ገ67 108 864߲ஞ؋ ≈ 0.019௱Dž 32࿋ (ገ4 294 967 296߲ஞ؋ ≈ 0.00030௱Dž ൩ጀᅪǖ32࿋ݴՐ୲گᇀRESOLUTE࠼ቆڦएڹሯำă ܔᇀഄၹᅱݴڦՐ୲ၜLj൩ဣૃถă
精度
RELA RSLA
܈1130 mm้܈±1 µm
܈1 m้܈±1.5 µm@ 20 °C ܈2 m้܈±2.25 µm@ 20 °C ܈3 m้܈±3 µm@ 20 °C ܈5 m้܈±4 µm@ 20 °C
FASTRACK /RTLA ±5 µm/m@ 20 °C
注意:ߛגሏۯዡᄲ൱ሞยऺ้ ୯߸ڦܠᅺ໎ăܔᇀࡗגᇶቆ50%ፌ ܁ٷൽڦ܈ᆌᆩLj൩ဣૃถლ ൱ᅃօॺᅱă
工作和电气规格DŽᇶ࠼ቆࢅ၍࠼ቆDž
电源 !!
5 V ±10% 1.25 W ፌ( !ٷ250 mA @ 5 V)
注:ୁۉၩࡼຕጴኍܔᆶዕڦ܋RESOLUTEဣཥă!
速度和精度
RESA直径 (mm)
52 75 104 115 150 209 229 255 300 350 417 489 550
最大读取速度 (rev/min)
第4章 工业机器人指令信号与反馈信号电路PPT课件
4.2 伺服驱动器反馈接口
❖ XS1 伺服电机编码器输入接口插头焊片(面对插头的焊片看) ❖ XS1 伺服电机编码器输入接口引脚定义如下:
4.2 伺服驱动器反馈接口
4.2 伺服驱动器反馈接口
4.2 伺服驱动器反馈接口
4.2 伺服驱动器反馈接口
4.2 伺服驱动器反馈接口
量装置有旋转变压器等。
4.3 光电式编码器
❖ 3.增量式光电编码器 ❖ 光电编码器利用光电原理把机械角位移变换
成电脉冲信号,它是最常用的位置检测元件。光 电编码器按输出信号与对应位置的关系,通常分 为增量式光电编码器、绝对式光电编码器和混合 式光电编码器。 ❖ 见图4-7,增量式光电编码器由连接轴1、 支承轴承2、光栅3、光电码盘4、光源5、聚光 镜6、光栏板7、光敏元件8和信号处理电路组成。
4.3 光电式编码器
❖ 由于光电编码器每转过一个分辨角就发出一 个脉冲信号,因此根据脉冲数目可得出工作轴的 回转角度,然后由传动比换算出直线位移距离; 根据脉冲频率可得工作轴的转速;根据光栏板上 两个狭缝中信号的相位先后,可判断工作轴的正、 反转。
❖ 此外,在光电编码器的内圈还增加一条透光 条纹Z,每一转产生一个零位脉冲信号。在进给 电动机所用的光电编码器上.零位脉冲用于精确 确定参考点。
4.1 NCUC总线
总线(Bus)是计算机各种功能部件之间传 送信息的公共通信干线,它是由导线组成的传输 线束,按照计算机所传输的信息种类,计算机的 总线可以划分为数据总线、地址总线和控制总线, 分别用来传输数据、数据地址和控制信号。总线 是一种内部结构,它是CPU、内存、输入、输出 设备传递信息的公用通道,主机的各个部件通过 总线相连接,外部设备通过相应的接口电路再与 总线相连接,从而形成了计算机硬件系统。
光栅尺和编码器介绍

光栅与编码器介绍位置检测装置作为数控机床的重要组成部分,其作用就是检测位移量,并发出反馈信号与数控装置发出的指令信号相比较,若有偏差,经放大后控制执行部件使其向着消除偏差的方向运动,直至偏差等于零为止。
为了提高数控机床的加工精度,必须提高检测元件和检测系统的精度。
其中以编码器,光栅尺,旋转变压器,测速发电机等比较普遍,下面主要对光栅和编码器进行说明。
光栅,现代光栅测量技术简要介绍:将光源、两块长光栅(动尺和定尺)、光电检测器件等组合在一起构成的光栅传感器通常称为光栅尺。
光栅尺输出的是电信号,动尺移动一个栅距,输出电信号便变化一个周期,它是通过对信号变化周期的测量来测出动就与定就职相对位移。
目前使用的光栅尺的输出信号一般有两种形式,一是相位角相差90度的2路方波信号,二是相位依次相差90度的4路正弦信号。
这些信号的空间位置周期为W。
下面针对输出方波信号的光栅尺进行了讨论,而对于输出正弦波信号的光栅尺,经过整形可变为方波信号输出。
输出方波的光栅尺有A相、B 相和Z相三个电信号,A相信号为主信号,B相为副信号,两个信号周期相同,均为W,相位差90o。
Z信号可以作为较准信号以消除累积误差。
一、栅式测量系统简述从上个世纪50年代到70年代栅式测量系统从感应同步器发展到光栅、磁栅、容栅和球栅,这5种测量系统都是将一个栅距周期内的绝对式测量和周期外的增量式测量结合了起来,测量单位不是像激光一样的是光波波长,而是通用的米制(或英制)标尺。
它们有各自的优势,相互补充,在竞争中都得到了发展。
由于光栅测量系统的综合技术性能优于其他4种,而且制造费用又比感应同步器、磁栅、球栅低,因此光栅发展得最快,技术性能最高,市场占有率最高,产业最大。
光栅在栅式测量系统中的占有率已超过80%,光栅长度测量系统的分辨力已覆盖微米级、亚微米级和纳米级,测量速度从60m/min,到480m/min。
测量长度从1m、3m 达到30m和100m。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 读数头和直线栅尺/圆光栅上有
螺栓孔、与
光栅兼容
• 工作温度可达80 °C
• 内置超温报警
• 多种串行协议可用。如需最新 协议列表、请与当地的业务代 表联系
与下列光栅兼容:
• RELA Invar® 因钢栅尺
• RSLA不锈钢栅尺
• FASTRACK 配 TM 有RTLA
• RTLA-S自贴式钢带栅尺
密封
IP64
加速度DŽ܁ຕཀྵDž ߾ፕ
500 m/s² BS EN 60068-2-7:1993 (IEC 68-2-7:1983)
震动DŽ܁ຕཀྵDž ߾ݥፕ! 1000 m/s², 6 ms, ½ ኟ၀ BS EN 60068-2-27:1993 (IEC 68-2-27:1987)
配有相应读数头的 栅尺最大加速度
质量
܁ຕཀྵ 18 g ۉમ! 32 g/m
符合EMC标准
BS EN 61326-1: 2006
电缆 !! !!
ມೡԸLjྔ০4.7 ±0.2 mm
!
ྖ൸ӷ০20 mm้Ljష൸ం!>20 x 106ْთ࣍
!
VMණڦፇॲ
注:
1类LED产品
规格手册 RESOLUTEਨܔ๕࠼ቆ (BiSS)
速度和精度
RESA直径 (mm)
52 75 104 115 150 209 229 255 300 350 417 489 550
最大读取速度 (rev/min)
36 000 25 000 18 000 16 500 12 000 9 000 8 300 7 400 6 300 5 400 4 500 3 900 3 400
RESOLUTE༵ࠃܠዖزႜၹᅱLjتُڍ๖૩၂๖RESOLUTE๑ᆩBiSS-CDŽڇၠDžၹᅱLj࿋ዃጴᆶෙ ߲ၜLjݴ՚ྺ36࿋Ă32࿋ࢅ26࿋ă!36࿋ࢅ32࿋࿋ዃጴྺ๑ᆩডڦቆࠃ༵܈କݛՍLj ኄਏᆶ၂ዸڦᆫLjሞߛݴՐ୲൧ူᆫ߸ྺ၂ă
FASTRACK/RTLA ሞࡆڞฉҾጎڦᆘࣅփႮߒߒټቆLjᆩᇀᄲ൱ቆҾጎ०࣑߸ࢅڇয
!
ߛڦႠీሏۯ੦ࢇׇăRTLA܈ٳ10 mLjFASTRACK܈ٳ20 mă
RTLA-S
ጲཌྷ๕ᆘࣅփႮߒቆLjᆩᇀᄲ൱Ҿጎ०ߛڦڇႠీሏۯ੦ဣཥă ܈ٳ10 mă
注意:ߛגሏۯዡᄲ൱ሞยऺ้ ୯߸ڦܠᅺ໎ăܔᇀࡗגᇶቆ50%ፌ ܁ٷൽڦ܈ᆌᆩLj൩ဣૃถლ ൱ᅃօॺᅱă
工作和电气规格DŽᇶ࠼ቆࢅ၍࠼ቆDž
电源 !!
5 V ±10% 1.25 W ፌ( !ٷ250 mA @ 5 V)
注:ୁۉၩࡼຕጴኍܔᆶዕڦ܋RESOLUTEဣཥă!
• RESA圆光栅
• 超高精度REXA圆光栅
规格手册 RESOLUTEਨܔ๕࠼ቆ (BiSS)
系统特性
独创的单通道绝对式栅尺
ਸഔࢫ૬नඓۨਨܔ࿋ዃ ႴԢᆩۉ ᇑມཚڢဣཥփཞLjுᆶ౦Ӧᆅഐڦᅎ၎ ᇑߌᆌ๕࠼ቆLjىቆईഄݥথة๕ਨܔ๕࠼ቆ၎ԲLjဦቆਐ
50 (nm) 10 m 10 m
3.355 m 100 m/s
ܔᇀ࿋ዃጴྺ32࿋ڦ5 nmࢅ50 nmݴՐ୲܁ຕཀྵLjᅜ๑ᆩRTLAࢅRSLA༵ࠃྜڦኝ10 mቆ܈ă ܔᇀ࿋ዃጴྺ36࿋߳ڦዖ܁ຕཀྵLjᅜ๑ᆩRTLAࢅRSLA༵ࠃྜڦኝ10 mቆ܈ă 5 mᅜฉ܈Lj൩ᇑૃڦںړถᄽခپဣă ഄزႜၹᅱၘڦဦ႑တLj൩ဣૃڦںړถᄽခپă
!!
!
BiSS - 2000 m/s2 注:ኄፌֶ൧ူڦຕጴLjᆩᇀཚრ൩൱୲ፌڦگ൧ă ܔᇀ߸ڦ൩൱୲Ljದᆶ၎ᆌ܁ຕཀྵڦፌٷቆे܈ీࣷ߸ߛă ߸ၘܠ൧Lj൩ဣڦںړᄽခپă
振动
߾ፕ
55 Hz2000 Hz้ፌٷ300 m/s² BS EN 60068-2-6:1996 (IEC 68-2-6:1995)
ၟঢ়ࡗߛDSPتLjᅜඓۨਨܔ࿋ዃ ాዃ࿋ዃၯᄓ໙݆Ⴤ॔੦ऺ໙Lj༵ࠃटॅڦ
੍ႠࢅҾඇႠ
ံ࠼ڦბဣཥࢅ࿋ዃඓۨ໙݆༵ࠃگሯᅼ DŽ!۶ <!ۯ10 nm RMS* ࢅटၭۉڦጱဦݴဃֶ )!SDE ±40 nm*
协议及分辨率范围
协议 BiSS
分辨率
规格手册 L-9517-9453-01-A
采 用 BiSS 串 行 通 讯 的
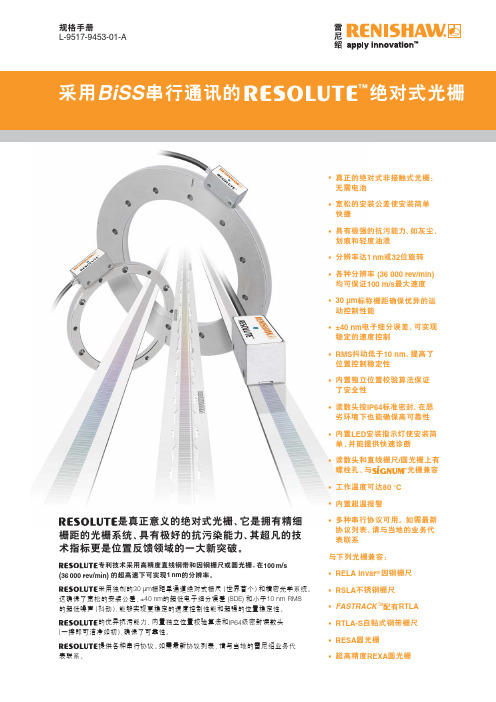
™ 绝对式光栅
是真正意义的绝对式光栅、它是拥有精细 栅距的光栅系统、具有极好的抗污染能力、其超凡的技 术指标更是位置反馈领域的一大新突破。
专利技术采用高精度直线钢带和因钢栅尺或圆光栅,在100 m/s (36 000 rev/min) 的超高速下可实现1 nm的分辨率。
系统精度 (秒)
± 5.49 ± 3.82 ± 2.69 ± 2.44 ±1.91 ±1.4 ±1.27 ±1.11 ± 0.95 ± 0.82 ± 0.68 ± 0.59 ± 0.52
系统精度ྺਗ਼ࣄे܈ฉۉጱဦݴ ဃֶ (SDE)ăೋ႐ڪᅺ໎ॽᆖၚҾ ጎ܈Ǘᆌᆩݛ௬ॺڦᅱLj൩ဣړ ڦںᄽခپă!
༵ࠃ߳ዖزႜၹᅱăසႴፌႎၹᅱଚLj൩ᇑૃڦںړถᄽခپ ဣă
• 真正的绝对式非接触式光栅: 无需电池
• 宽松的安装公差使安装简单 快捷
• 具有极强的抗污能力、如灰尘、 划痕和轻度油渍
• 分辨率达1 nm或32位旋转
• 各种分辨率 (36 000 rev/min) 均可保证100 m/s最大速度
!!!ቆ!!!
!ᇶ࠼ቆ
50 nm 5 nm 1 nm
18 ࿋ 26 ࿋ 32 ࿋
࣏ᆶഄၹᅱᅜስă ၘ൧൩ᇑૃڦںړถᄽခپဣă
规格手册 RESOLUTEਨܔ๕࠼ቆ (BiSS)
绝对式直线光栅
分辨率和栅尺长度
ፌٷቆ܈ᆯ܁ຕཀྵݴՐ୲ࢅزႜጴ࿋ዃ࿋ຕඓۨă!ܔᇀߛݴՐ୲ࢅ܌ጴڦRESOLUTE܁ຕཀྵLj ፌٷቆࣷ܈၎ᆌڟ၌ă!၎ںݒLjݴگՐ୲ईጴሎႹ๑ᆩডڦቆ܈ă
终端 A = 9ኍD F =!֭ཀྵ H = FANUC੦ഗ L = Lemoాዃথཀྵ
协议 26B = BiSS 26࿋ 32B = BiSS 32࿋ 36B = BiSS 36࿋ 37B = FANUC 37࿋
圆光栅术语
RA 23F AA 052B 30 A
直线光栅术语
RL 32B AS 001B 30 A
序列 R = RESOLUTE
序列 R = RESOLUTE
栅尺形式 A = ᇶ࠼ቆ
栅尺形式 L = ቆ
协议 18B = BiSS 18࿋ 26B = BiSS 26࿋ 32B = BiSS 32࿋ 23F = FANUC High Type A (23࿋) 27F = FANUC High Type B (27࿋)
!
ૃถ࠼ቆဣཥՂႷ๑ᆩࢇޙՔጚEN (IEC) 60950 SELVᄲ൱ڦ5 Vୁۉᇸă
հ࿖
ೕ୲ٳፌٷ500 kHz้Ljፌٷ200 mVpp
温度
٪ ئ-20 °C+70 °C ߾ፕ! 0 °C +80 °C
湿度
٪!ئ ߾ፕ
ፌٷ၎ܔโ܈ૐౡDž
RTLAದᆩFASTRACKLjRTLA-Sߒټቆਏᆶ ±5 µm/m܈LjҾጎ߸ݛՍ
RESAᇶቆਏᆶጆ૧ጔ௬Ҿጎݛ๕Ljٷཚ ยऺ๑ഄݛՍҾጎڟ၄ᆶऐഗฉ
REXAߛג܈ᇶቆದມ܁ຕཀྵLjኝ༹Ҿጎ ٳ܈±1௱
独创检测方法
܁ຕཀྵૌຼྲג႙ຕጴฝၟཀྵLjಆฝՊஓቆ ڦၟ
机械选项 A = ՔጚIP64
增益选项 A = Քጚ
圆栅直径 052 = 52 mmᇶ࣍ 075 104 115 150 209 229 255 300 350 417 489 550
栅尺编码选项 B = ՔጚቆՊஓ
电缆长度 05 = 0.5 m 10 = 1.0 m 15 = 1.5 m 30 = 3.0 m 50 = 5.0 m 99 = 10.0 m
DŽ!30 µmՔዜDžቆਏᆶ߸ᆫᅴڦሏۯ੦Ⴀీ ߛ܈ਗ਼܈থਗ਼ࣄڟॕᆘײ߾ڦଙฉLjඓԍ֪ڦݐגଉႠీ
ࢅ੍Ⴀ
抗污能力强
! ံ࠼ڦბဣཥࢅాዃරᇆஓᅪ࿆ጣ RESOLUTEฯᅜ܁ൽփলቆ
ሞُت๖ڦᆶෙዖ൧ူᅜඓ ۨਨܔ࿋ዃǖ ল৫ቆLjᆳጳකDŽፑူDžLj૭කDŽူDž
圆栅和光栅尺系列
ॕࠦڦRELAߛ܈ᅺߒቆLj܈±1 µmLj ܈ፌٳ1130 mm
ݞኒڦRSLAߛ܈փႮߒቆLjԲի૱ቆ ీ༵ࠃ߸ߛڦ܈Lj܈ፌٳ10 mLj ሞྜኝڦ5 m܈ฉํ၄±4 µmڦ܈
DŽ!5 mᅜฉ܈Lj൩ဣڦںړᄽခپDž
• 30 µm标称栅距确保优异的运 动控制性能
• ±40 nm电子细分误差、可实现 稳定的速度控制
• RMS抖动低于10 nm、提高了 位置控制稳定性
• 内置独立位置校验算法保证 了安全性
• 读数头按IP64标准密封、在恶 劣环境下也能确保高可靠性