机械控制工程基础-习题集(含答案)
机械控制工程基础试题及答案
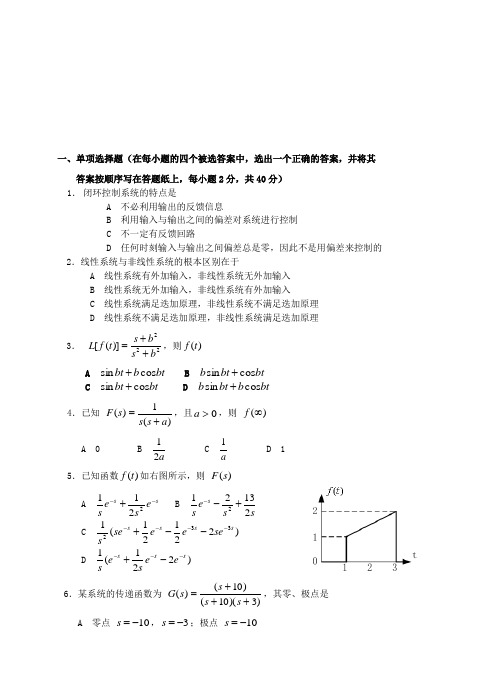
一、单项选择题(在每小题的四个被选答案中,选出一个正确的答案,并将其答案按顺序写在答题纸上,每小题2分,共40分)1. 闭环控制系统的特点是2. A 不必利用输出的反馈信息3. B 利用输入与输出之间的偏差对系统进行控制4. C 不一定有反馈回路5. D 任何时刻输入与输出之间偏差总是零,因此不是用偏差来控制的2.线性系统与非线性系统的根本区别在于A 线性系统有外加输入,非线性系统无外加输入B 线性系统无外加输入,非线性系统有外加输入C 线性系统满足迭加原理,非线性系统不满足迭加原理D 线性系统不满足迭加原理,非线性系统满足迭加原理3. 222)]([b s b s t f L ++=,则)(t f A bt b bt cos sin + B bt bt b cos sin +C bt bt cos sin +D bt b bt b cos sin +4.已知 )(1)(a s s s F +=,且0>a ,则 )(∞f A 0 B a 21 C a1 D 1 5.已知函数)(t f 如右图所示,则 )(s FA s s e s es --+2211 B s se s s 213212+-- C )22121(1332s s s s se e e se s------+ D )221(1s s s e e s e s ----+ 6.某系统的传递函数为 )3)(10()10()(+++=s s s s G ,其零、极点是 A 零点 10-=s ,3-=s ;极点 10-=sB 零点 10=s ,3=s ;极点 10=sC 零点 10-=s ;极点 10-=s ,3-=sD 没有零点;极点 3=s7.某典型环节的传递函数为Ts s G =)(,它是A 一阶惯性环节B 二阶惯性环节C 一阶微分环节D 二阶微分环节8.系统的传递函数只与系统的○有关。
A 输入信号B 输出信号C 输入信号和输出信号D 本身的结构与参数9.系统的单位脉冲响应函数t t g 4sin 10)(=,则系统的单位阶跃响应函数为A t 4cos 40 B16402+s C )14(cos 5.2-t D 16102+s 10.对于二阶欠阻尼系统来说,它的阻尼比和固有频率A 前者影响调整时间,后者不影响B 后者影响调整时间,前者不影响C 两者都影响调整时间D 两者都不影响调整时间11.典型一阶惯性环节11+Ts 的时间常数可在单位阶跃输入的响应曲线上求得, 时间常数是A 响应曲线上升到稳态值的95%所对应的时间B 响应曲线上升到稳态值所用的时间C 响应曲线在坐标原点的切线斜率D 响应曲线在坐标原点的切线斜率的倒数 12.已知)()()(21s G s G s G =,且已分别测试得到:)(1ωj G 的幅频特性 )()(11ωωA j G =,相频)()(11ωϕω=∠j G)(2ωj G 的幅频特性 2)(2=ωj G ,相频ωω1.0)(2-=∠j G则A )(1.011)(2)(ωωϕωωj e A j G -⋅=B ]1.0)([11)](2[)(ωωϕωω-⋅+=j eA j G C ]1.0)([11)(2)(ωωϕωω-⋅=j e A j GD )(1.011)](2[)(ωωϕωωj eA j G -⋅+= 13.已知 )8.01)(2.01()(s s k s G ++=,其相频特性为 A ω16.0arctg - B ωω8.02.0arctg arctg +C )8.02.0(ωωarctg arctg +-D ωω8.02.0arctg arctg -14.若系统的Bode 图在1ω处出现转折(如图所示),其渐近线由dec db /20-转到dec db /0,这说明系统中有一个环节是A 1ω+sB 11ωω+s C 111+s ω D 2112212ωξωω++s s 15.设某系统开环传递函数为:)13(10)(2+=s s s G ,则此闭环系统 A 稳定 B 不稳定C 临界稳定D 满足稳定的必要条件16.)(c ωϕ为开环频率特性幅值等于1时的相位角,则相位裕度等于A )(180C ωϕ+B )(C ωϕC )(180C ωϕ-D 180)(-C ωϕ17.系统的开环对数坐标图(Bode 图)与极坐标图(Nyquist 图)之间的对应关系为A Bode 图上的零分贝线对应于Nyquist 图上的)0,1(j -点B Bode 图上的180-线对应于Nyquist 图的负实轴C Bode 图上的负分贝值对应于Nyquist 图负实轴上)1,(--∞区间D Bode 图上的正分贝值对应于Nyquist 图正实轴18.若已知某系统串联校正装置的传递函数为bs a s ++,其中 b a < 则它是一种A 相位滞后—超前校正B 相位滞后校正C 相位超前校正D 相位超前—滞后校正 19.从某系统的Bode 图上,已知其剪切频率200≈c ω,则下列串联校正装置的传递函数中,能在基本保持原系统稳定性及频带宽的前提下,通过适当调整增益使系统稳态误差减至最小的是A 105.015.0++s sB 15.0105.0++s s C 15.011.0++s s D 1005.010005.0++s s 20.下列串联校正装置的传递函数中,能在频率1=c ω处提供最大相位超前角的是 A1215.0++s s B 15.012++s s C14.015.2++s s D 15.214.0++s s二、简答题(1,2小题每题7分,3,4小题每题8分,共计30分)1. 试求一阶系统15.01+s 的单位阶跃响应)(t c ,画出近似响应曲线,并标出时间常数T 的值。
机械控制工程基础_习题集(含答案)
《机械控制工程基础》课程习题集西南科技大学成人、网络教育学院 版权所有习题【说明】:本课程《机械控制工程基础》(编号为09010)共有单选题,计算题, 填空题等多种试题类型,其中,本习题集中有[ 填空题]等试题类型未进入。
一、单选题1. t e 2-的拉氏变换为( )。
A.s21; B. 15.0+s ; C. 21+s ;D.21se 2- 2. )(tf 的拉氏变换为)2(6][+=s s s F ,则)(t f 为( )。
A. te23-; B. te21--; C. )1(32te--; D. t e 26-3. 脉冲函数的拉氏变换为( )。
A. 0 ;B. ∞;C. 常数;D. 变量4. ()t t f δ5)(=,则=)]([t f L ( )。
A. 5 ;B. 1 ;C. 0 ;D.s55. 已知)52)(2(33)(22+++++=s s s s s s s F ,其原函数的终值=∞→t t f )(( )。
A. ∞ ; B. 0 ; C. 0.6 ; D. 0.36. 已知)45(32)(22++++=s s s s s s F ,其原函数的终值=∞→t t f )(( )。
A. 0 ;B. ∞ ;C. 0.75 ;D. 37. 已知sn e s a s F τ-=2)(其反变换f (t)为( )。
A.)(ττa t n a -⋅; B. )(τn t a -⋅; C. τn te a -⋅; D. )(1τn t a-⋅ 8. 已知)1(1)(+=s s s F ,其反变换f (t)为( )。
A. t e -1;B. t e -+1;C. t e --1;D. 1--t e9. 已知t e t f t 2sin )(-=的拉氏变换为( )。
A.ses 2242-+ ; B. 4)4(22++s ; C.4)1(2++s s; D.se s s 224-+ 10. 图示函数的拉氏变换为( )。
历年机械工程控制基础试题及答案

全国2002年10月自学考试机械工程控制基础试卷一、单项选择题(在每小题的四个备选答案中选出一个正确答案,并将其号码填在题干的括号内。
每小题1。
5分,共30分)1.控制工程主要研究并解决的问题之一是( ) A 。
系统已定,输入不确定,求系统的输出B 。
系统已定,输入已知,求系统的输出(响应) C.系统已定,规定系统的输入D.系统不定,输入已知,求出系统的输出(响应)2.f(t )如图所示 则L [f (t)]为( )A 。
s 1e —2t B. s 2e -2s C 。
s 1e —2s D 。
s1e —ts3.已知F (s)=1)s(s 1+,则L -1[F (s )]为( )4。
已知F(s)=L [f (t)],若F(s )=12s s 12++,则f(t )|t ∞→=?( )A 。
21 B 。
1 C 。
31D.0 5.下列系统中为线性系统的微分模型为:( )A.dt)t (dx )t (x )dt )t (dx (12dt )t (x d 16i 020202=++ B.)t (x )t (x 24dt)t (dx 12dt )t (x d 16i 00202=++C.)t (x )t (x 24dt)t (dx 12)dt )t (x d (16i 002202=++ D 。
)t (x )t (x )t ln(24dt)t (dx 12e dt )t (x d 16i 00t 202=⋅+⋅+ 6。
对于定常控制系统来说,( )A 。
表达系统的微分方程各项系数不随时间改变B 。
微分方程的各阶微分项的幂为1 C.不能用微分方程表示 D.系统总是稳定的7.系统方框图如图所示,则系统的闭环传递函数为( )A 。
G(S)H(S)1G(S)H(S)+B.G(S)-1H(S)G(S)⋅C 。
1+G(S )·H (S)D 。
G(S)H(S)1G(S)+8.二阶系统的传递函数为4)0.5)(s (s 10++,则系统增益为( )A 。
机械控制工程基础复习题及参考答案

机械控制工程基础复习题及参考答案Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT一、单项选择题:1. 某二阶系统阻尼比为0,则系统阶跃响应为A. 发散振荡B. 单调衰减C. 衰减振荡D. 等幅振荡2. 一阶系统G(s)=1+Ts K的时间常数T 越小,则系统的输出响应达到稳态值的时间 A .越长 B .越短 C .不变D .不定3. 传递函数反映了系统的动态性能,它与下列哪项因素有关A.输入信号B.初始条件C.系统的结构参数D.输入信号和初始条件4.惯性环节的相频特性)(ωθ,当∞→ω时,其相位移)(∞θ为A .-270°B .-180°C .-90°D .0°5.设积分环节的传递函数为G(s)=s1,则其频率特性幅值M(ω)=A. ωKB. 2K ω C. ω1D.21ω6. 有一线性系统,其输入分别为u 1(t)和u 2(t)时,输出分别为y 1(t)和y 2(t)。
当输入为a 1u 1(t)+a 2u 2(t)时(a 1,a 2为常数),输出应为A. a 1y 1(t)+y 2(t)B. a 1y 1(t)+a 2y 2(t)C. a 1y 1(t)-a 2y 2(t)D. y 1(t)+a 2y 2(t)7.拉氏变换将时间函数变换成A .正弦函数B .单位阶跃函数C .单位脉冲函数D .复变函数8.二阶系统当0<ζ<1时,如果减小ζ,则输出响应的最大超调量%σ将A.增加B.减小C.不变D.不定9.线性定常系统的传递函数,是在零初始条件下A .系统输出信号与输入信号之比B .系统输入信号与输出信号之比C .系统输入信号的拉氏变换与输出信号的拉氏变换之比D .系统输出信号的拉氏变换与输入信号的拉氏变换之比10.余弦函数cos t ω的拉氏变换是A.ω+s 1B.22s ω+ωC.22s s ω+D. 22s 1ω+11. 微分环节的频率特性相位移θ(ω)=A. 90°B. -90°C. 0°D. -180°12. II 型系统开环对数幅频渐近特性的低频段斜率为A. -40(dB/dec)B. -20(dB/dec)C. 0(dB/dec)D. +20(dB/dec)13.令线性定常系统传递函数的分母多项式为零,则可得到系统的A .代数方程B .特征方程C .差分方程D .状态方程14. 主导极点的特点是 A.距离实轴很远 B.距离实轴很近 C.距离虚轴很远 D.距离虚轴很近15.采用负反馈连接时,如前向通道的传递函数为G(s),反馈通道的传递函数为H(s),则其等效传递函数为A .)s (G 1)s (G +B .)s (H )s (G 11+C .)s (H )s (G 1)s (G +D .)s (H )s (G 1)s (G -二、填空题:1.线性定常系统在正弦信号输入时,稳态输出与输入的相位移随频率而变化的函数关系称为__ __。
机械控制工程基础复习题及参考答案
一、单项选择题:1. 某二阶系统阻尼比为0,则系统阶跃响应为 DA. 发散振荡B. 单调衰减C. 衰减振荡D. 等幅振荡2. 一阶系统G(s)=1+Ts K的时间常数T 越小,则系统的输出响应达到稳态值的时间 BA .越长B .越短C .不变D .不定3. 传递函数反映了系统的动态性能,它与下列哪项因素有关? CA.输入信号B.初始条件C.系统的结构参数D.输入信号和初始条件4.惯性环节的相频特性)(ωθ,当∞→ω时,其相位移)(∞θ为 CA .-270°B .-180°C .-90°D .0° 5.设积分环节的传递函数为G(s)=s1,则其频率特性幅值M(ω)= C A.ωKB. 2K ωC. ω1D. 21ω6. 有一线性系统,其输入分别为u 1(t)和u 2(t)时,输出分别为y 1(t)和y 2(t)。
当输入为a 1u 1(t)+a 2u 2(t)时(a 1,a 2为常数),输出应为 BA. a 1y 1(t)+y 2(t)B. a 1y 1(t)+a 2y 2(t)C. a 1y 1(t)-a 2y 2(t)D. y 1(t)+a 2y 2(t)7.拉氏变换将时间函数变换成 DA .正弦函数B .单位阶跃函数C .单位脉冲函数D .复变函数8.二阶系统当0<ζ<1时,如果减小ζ,则输出响应的最大超调量%σ将 AA.增加B.减小C.不变D.不定9.线性定常系统的传递函数,是在零初始条件下 DA .系统输出信号与输入信号之比B .系统输入信号与输出信号之比C .系统输入信号的拉氏变换与输出信号的拉氏变换之比D .系统输出信号的拉氏变换与输入信号的拉氏变换之比10.余弦函数cos t ω的拉氏变换是 CA.ω+s 1B.22s ω+ω C.22s s ω+ D. 22s 1ω+ 11. 微分环节的频率特性相位移θ(ω)= AA. 90°B. -90°C. 0°D. -180°12. II 型系统开环对数幅频渐近特性的低频段斜率为 AA. -40(dB/dec)B. -20(dB/dec)C. 0(dB/dec)D. +20(dB/dec)13.令线性定常系统传递函数的分母多项式为零,则可得到系统的 BA .代数方程B .特征方程C .差分方程D .状态方程14. 主导极点的特点是 DA.距离实轴很远B.距离实轴很近C.距离虚轴很远D.距离虚轴很近15.采用负反馈连接时,如前向通道的传递函数为G(s),反馈通道的传递函数为H(s),则其等效传递函数为 CA .)s (G 1)s (G + B .)s (H )s (G 11+C .)s (H )s (G 1)s (G + D .)s (H )s (G 1)s (G -二、填空题:1.线性定常系统在正弦信号输入时,稳态输出与输入的相位移随频率而变化的函数关系称为__ 相频特性 __。
机械控制工程基础复习题及参考答案
A. 越长 C.不变 传递函数反映了系统的动态性能,它与下列哪项因素有关?4. 惯性环节的相频特性 <?(•'),当::;:r时,其相位移 门(二)为CA . -270 °B . -180 ° C. -90 °D. 0°二阶系统当0< <1时,如果减小 :则输出响应的最大超调量 A.增加 B.减小 C.不变D.不定9.线性定常系统的传递函数,是在零初始条件下DA. 系统输出信号与输入信号之比B. 系统输入信号与输出信号之比C. 系统输入信号的拉氏变换与输出信号的拉氏变换之比D.系统输出信号的拉氏变换与输入信号的拉氏变换之比10. 余弦函数cos •,t 的拉氏变换是 CA.A. 90 °B. -90D. -180 12. II 型系统开环对数幅频渐近特性的低频段斜率为AA. -40(dB/dec )B. -20(dB/dec )C. 0(dB/dec )D. +20(dB/dec )13. 令线性定常系统传递函数的分母多项式为零,则可得到系统的1.、单项选择题: 某二阶系统阻尼比为 A.发散振荡 C.衰减振荡 0,则系统阶跃响应为 D 单调衰减 等幅振荡 B. D. 2. K 阶系统G(s)= —— Ts + 1的时间常数 T 越小,则系统的输出响应达到稳态值的时间BC.11. D.1s 2 …‘20 ( 3 )= A微分环节的频率特性相位移 B .越短D.不定A.输入信号 C.系统的结构参数B.初始条件 D.输入信号和初始条件 3.5.设积分环节的传递函数为G(s)=—, 则其频率特性幅值 MC ■)= C6. 7. B.C. 1©有一线性系统,其输入分别为 U 1(t )和U 2(t )时,输出分别为a 1U 1(t )+a 2U 2(t )时(a 1,a 2为常数),输出应为 BA. a y (t )+y 2(t )C. a 1y 1(t )-a 2y 2(t ) 拉氏变换将时间函数变换成 A .正弦函数 C.单位脉冲函数D. B. a y(t)+a 2y 2(t)D. y 1(t)+a 2y 2(t)DB.单位阶跃函数 D .复变函数 y«t )和y 2(t )。
机械控制工程基础习题集

《机械控制工程基础》习题及解答目录第1章绪论第2章控制系统的数学模型第3章控制系统的时域分析第4章控制系统的频域分析第5章控制系统的性能分析第6章控制系统的综合校正第7章模拟考试题型及分值分布第1章绪论一、选择填空题1.开环控制系统在其控制器和被控对象间只有(正向作用)。
P2A.反馈作用B.前馈作用C.正向作用D.反向作用2.闭环控制系统的主反馈取自(被控对象输出端)。
P3A.给定输入端B.干扰输入端C.控制器输出端D.系统输出端3.闭环系统在其控制器和被控对象之间有(反向作用)。
P3A.反馈作用B.前馈作用C.正向作用D.反向作用A.输入量B.输出量C.反馈量D.干扰量4.自动控制系统的控制调节过程是以偏差消除(偏差的过程)。
P2-3A.偏差的过程B.输入量的过程C.干扰量的过程D.稳态量的过程5.一般情况下开环控制系统是(稳定系统)。
P2A.不稳定系统B.稳定系统C.时域系统D.频域系统6.闭环控制系统除具有开环控制系统所有的环节外,还必须有(B)。
p5A.给定环节B.比较环节C.放大环节D.执行环节7.闭环控制系统必须通过(C)。
p3A.输入量前馈参与控制B.干扰量前馈参与控制C.输出量反馈到输入端参与控制D.输出量局部反馈参与控制8.随动系统要求系统的输出信号能跟随(C的变化)。
P6A.反馈信号B.干扰信号C.输入信号D.模拟信号9.若反馈信号与原系统输入信号的方向相反则为(负反馈)。
P3A.局部反馈B.主反馈C.正反馈D.负反馈10.输出量对系统的控制作用没有影响的控制系统是(开环控制系统)。
P2A.开环控制系统B.闭环控制系统C.反馈控制系统D.非线性控制系统11.自动控制系统的反馈环节中一般具有(B )。
p5A..给定元件B.检测元件C.放大元件D.执行元件12. 控制系统的稳态误差反映了系统的〔 B 〕p8A. 快速性B.准确性C. 稳定性D.动态性13.输出量对系统的控制作用有直接影响的系统是(B )p3A.开环控制系统B.闭环控制系统C.线性控制系统D.非线性控制系统14.通过动态调节达到稳定后,被控量与期望值一致的控制系统为(无差系统)。
机械控制工程基础_习题集(含答案)

《机械控制工程基础》课程习题集一、单选题1. t e 2-的拉氏变换为( )。
A.s21; B. 15.0+s ; C. 21+s ;D.21se 2- 2. )(tf 的拉氏变换为)2(6][+=s s s F ,则)(t f 为( )。
A. te23-; B. te21--; C. )1(32t e --; D. te26-3. 脉冲函数的拉氏变换为( )。
A. 0 ;B. ∞;C. 常数;D. 变量4. ()t t f δ5)(=,则=)]([t f L ( )。
A. 5 ;B. 1 ;C. 0 ;D.s55. 已知)52)(2(33)(22+++++=s s s s s s s F ,其原函数的终值=∞→t t f )(( )。
A. ∞ ; B. 0 ; C. 0.6 ; D. 0.36. 已知)45(32)(22++++=s s s s s s F ,其原函数的终值=∞→t t f )(( )。
A. 0 ;B. ∞ ;C. 0.75 ;D. 37. 已知sn e sa s F τ-=2)(其反变换f (t)为( )。
A.)(ττa t n a -⋅; B. )(τn t a -⋅; C. τn te a -⋅; D. )(1τn t a-⋅ 8. 已知)1(1)(+=s s s F ,其反变换f (t)为( )。
A. te -1; B. te -+1; C. te --1; D. 1--te9. 已知t e t f t 2sin )(-=的拉氏变换为( )。
A.se s 2242-+ ; B. 4)4(22++s ; C.4)1(2++s s; D.se s s 224-+ 10. 图示函数的拉氏变换为( )。
A.)1(12s e s a ττ--; B. )1(12s e s a ττ--; C. )1(1se s a ττ--;D. )1(12s e sa ττ- 11. 若)(∞f =0,则][s F 可能是以下( )。