微机原理及接口第八章习题解答
1632位微机原理汇编语言及接口技术第八章课后习题答案

习题8.4中断请求寄存器IRR保存8条外界中断请求信号IR0~IR7的请求状态Di位为1表示IRi引脚有中断请求;为0表示无请求中断服务寄存器ISR保存正在被8259A服务着的中断状态Di位为1表示IRi中断正在服务中;为0表示没有被服务中断屏蔽寄存器IMR保存对中断请求信号IR的屏蔽状态Di位为1表示IRi中断被屏蔽(禁止);为0表示允许习题8.6某时刻8259A的IRR内容是08H,说明IR3引脚有中断请求。
某时刻8259A 的ISR内容是08H,说明IR3正在被中断服务,其它不被处理。
在两片8259A级连的中断电路中,主片的第5级IR5作为从片的中断请求输入,则初始化主、从片时,ICW3的控制字分别是 20H 和 05H 。
习题8.9普通全嵌套方式:8259A的中断优先权顺序固定不变,从高到低依次为IR0、IR1、IR2、……IR7;中断请求后,8259A对当前请求中断中优先权最高的中断IRi予以响应,将其向量号送上数据总线;在ISR的Di位置位期间,禁止再发生同级和低级优先权的中断,但允许高级优先权中断的嵌套。
普通中断结束方式:配合全嵌套优先权方式使用;CPU用输出指令往8259A发出普通中断结束EOI命令;8259A就会复位正在服务的中断中优先权最高的ISR位。
习题8.13int08h proc far ;远过程sti ;开中断,允许中断嵌套push ds ;现场保护push axpush dx…… ;日时钟计时…… ;控制软驱马达int 1ch ;调用指令中断1CHmov al,20h ;发送EOI命令(00100000B,D4D3=00,说明是OCW2)out 20h,alpop ax ;现场恢复pop dxpop dsiret ;中断返回。
微机原理第一章至第八章作业参考答案
1KB 512B
8KB
1KB=210 的偏移地址范围为: 00 0000 0000~11 1111 1111 即 000H~3FFH 512B=29 的偏移地址范围为: 0 0000 0000~1 1111 1111 即 000H~1FFH 8KB=213 的偏移地址范围为: 0 0000 0000 0000~1 1111 1111 1111 即 0000H~1FFFH
POP AX
PUSH CX
2.10 下列程序段中每一条指令执行完后,AX 中的十六进制内容是什么?
MOV AX,0
;0000H
DEC AX
;0000H-1=0FFFFH
ADD AX,7FFFH
;0FFFFH+7FFFH=7FFEH
ADD AX,2
;7FFEH+2=8000H
NOT AX
;NOT 8000H=7FFFH
目标:寄存器寻址
(5)TEST ES:[SI],DX
目标:寄存器间接寻址 源:寄存器寻址
(6)SBB SI,[BP]
目标:寄存器寻址
源:寄存器间接寻址
2.8 假定 DS=2000H,ES=2100H,SS=1500H,SI=00A0H,BX=0100H,BP=0010H,数据段中变
量名 VAL 的偏移地址值为 0050H,试指出下面源操作数字段的寻址方式是什么?其物理地址值是多少?
每条指令执行后 AX 的内容为:
0000H
0FFFFH 7FFEH
8000H
7FFFH
8000H
0000H
0BFDFH 0ABCDH 0CDABH 9B56H
36ADH
2.15 假定 DX=00B9H,CL=3,CF=1,确定下列各条指令单独执行后 DX 中的值。
微机原理与接口技术课后第八章习题答案
第8章中断系统与可编程中断控制器8259A1.什么叫中断?8086微机系统中有哪几种不同类型的中断?答:在CPU执行程序的过程中,由于某个事件的发生,CPU暂停当前正在执行的程序,转去执行处理该事件的一个中断服务程序,待中断服务程序执行完成后,CPU再返回到原被中断的程序继续执行。
这个过程称为中断。
8086微机系统中有3种中断:1)外部可屏蔽中断。
2)外部不可屏蔽中断。
3)内部中断2.什么是中断类型?它有什么用处?答:通常用若干位二进制编码来给中断源编号,该编号称为中断类型号。
8086微处理器用8位二进制码表示一个中断类型,有256个不同的中断。
这些中断可以划分为内部中断、外部不可屏蔽中断、外部可屏蔽中断三类。
用处:使CPU识别中断源,从而能正确地转向该中断源对应的中断服务程序入口。
3.什么是中断嵌套?使用中断嵌套有什么好处?对于可屏蔽中断,实现中断嵌套的条件是什么?答:微处理器在处理低级别中断的过程中,如果出现了级别高的中断请求,微处理器停止执行低级中断的处理程序而去优先处理高级中断,等高级中断处理完毕后,再接着执行低级的未处理完的程序,这种中断处理方式成为中断嵌套。
使用中断嵌套的好处是能够提高中断响应的实时性。
对于某些对实时性要求较高的操作,必须赋予较高的优先级和采取中断嵌套的方式,才能保证系统能够及时响应该中断请求。
对于可屏蔽中断,实现中断嵌套的条件有:(1)微处理器处于中断允许状态(IF=1)(2)中断请求的优先级高于正在执行的中断处理程序的优先级。
(3)中断请求未被8259屏蔽。
(4)没有不可屏蔽中断请求和总线请求。
4.什么是中断向量?中断类型号为1FH的中断向量为2345H:1234H,画图说明它在中断向量表中的存放位置。
答:中断向量为每个中断服务子程序的入口地址,为32位(16位的偏移地址和16位的段地址),在中断向量表中占用4个地址单元。
在8086CPU组成的计算机系统中,采用最低的1024个地址单元(称为0页)来存储中断向量。
微机原理与接口技术习题答案

微机原理与接口技术部分习题参考解答第一章2. 第3项任务,根据状态标志位的状态决定转移方向。
3. 程序存储是将要执行的程序的全部指令存储到存储器中,程序控制指程序开始执行后,通过指令流控制数据或计算机,完成设定的任务。
4. 分BIU 总线接口部件和EI执行部件两大部件,其中总线接口部件BIU负责取指令和数据,执行部件EI负责执行指令及运算。
在执行一条指令的同时可以取下一条指令,重叠运行,速度快。
5. 有6个状态标志,分别为进位标志CF、溢出标志OF、零标志ZF、奇偶标志PF、负标志SF、辅助进位标志AF。
3个控制标志分别为中断允许标志IF、单步标志TF、方向标志DF。
标志位的内容可以通过标志位操作指令来操作,例如CLC指令清除进位位,即使CF=0,STC指令使CF=1,CLI指令使IF=0,禁止中断,STI指令使IF=1,允许中断。
还可以通过LAHF指令取来标识寄存器的内容修改后用SAHF指令送回去。
也可以用PUSHF/POPF指令来修改标志寄存器的内容。
6. 实模式下分段靠4个段寄存器实现。
段寄存器中的值就是段地址,当偏移地址为0时的段地址+偏移地址就是该段的起始地址。
物理地址是由段地址左移4位后与偏移地址相加形成的20位地址。
7. 说法不一定正确。
对顺序执行指令的计算机是对的。
对重叠或流水线的计算机就不对了。
例如对8086CPU,由于采用了取指令与执行指令的一次重叠,尽管执行一条指令的总时间并没有变化,但连续执行n条指令时,总的时间会大大缩短,可以简单的比喻成总时间为原时间的二分之一,快了一倍。
8. 引入流水线后,执行一条指令的总时间并没有变化。
9. 高速缓存的目的是提高存储器的速度,进而提高了CPU的速度。
虚拟存储器的目的是为了给程序员或程序一个大的存储或运行空间。
10。
8086采用总线接口部件BIU与执行部件EU分开提高了速度,286将8086的BIU进一步分成3个部件,提高了并行性。
386在286基础上进一步增加成6个逻辑部件,实现多条指令重叠,进一步提高了速度,486采用硬组合逻辑控制器,同时采用内嵌高速缓存,提高速度。
《微型计算机原理与接口技术》(尹建华)习题答案资料讲解
《微型计算机原理与接口技术》(尹建华)习题答案第一章2、156D = 10011100B = 9CH79D = 1001111B = 4FH0.675D = 0.1011B = 0.BH37.164D = 100101.0011B = 25.3H3、136D = 10001000B111010.111B = 3A.EH110010.11B = 62.6Q157Q = 06FH133Q = 910AE7.D2H = 101011100111.11010010B0.468D = 0.0111B4、无符号数:151符号数:-1058421BCD:976、+1原码 = 00000001反码 = 00000001补码= 00000001-1原码 = 10000001反码 = 11111110补码 = 11111111+36原码= 00100100反码 = 00100100补码 = 00100100-36原码= 10100100反码 = 11011011补码 = 11011100-128原码= 1000000010000000反码 = 111111*********补码 = 100000007、⑴ -128⑵ -1⑶ 15⑷ -868、⑴ 0 ~ 255⑵ -127 ~ +127⑶ -32767 ~ +32768 11、34H + 89H无溢出0AFH+ 45H无溢出76H-0FEH无溢出第二章2、1MB,64KB3、不能4、4,1,时钟5、0FFFF0H寄存器名FRIPCSDSSSES指令队列其它寄存器复位状态0000H0000HFFFFH0000H0000H0000H清空0000H6、段基地址和偏移地址1230H:0045H1000H:2345H7、90000H ~ 9FFFFH11、等待周期:8086CPU与慢速的存储器和I/O设备交换信息时,为了防止丢失数据,在总线周期的和之间,插入一些必要的等待状态,用来给予必要的时间补偿。
《微机原理与接口》习题及参考答案 周明德第五版

《微机原理与接口》课程习题及参考答案2012年秋季第一章习题(教材P29)作业11.1 微处理器、微型计算机和微型计算机系统三者之间有什么不同?【解】把CPU(运算器和控制器)集成在一个芯片上,即为微处理器。
微处理器加上部分存储器和外设(或外设接口)就构成了微型计算机。
微型计算机与管理、维护计算机硬件以及支持应用的软件相结合就形成微型计算机系统。
1.2 CPU在内部结构上由哪几部分组成?CPU应该具备哪些主要功能?【解】CPU主要由算术逻辑单元、指令寄存器、指令译码器、可编程逻辑阵列、寄存器组、标志寄存器等组成。
CPU主要功能是进行算术逻辑运算,以及控制计算机按照程序的规定自动运行。
1.3 微型计算机采用总线结构有什么优点?【解】采用总线结构,扩大了数据传送的灵活性,减少了连线;而且总线可以标准化,易于兼容和工业化生产。
1.4 数据总线和地址总线在结构上有什么不同之处?如果一个系统的数据和地址合用一组总线或者合用部分总线,那么要靠什么来区分地址和数据?【解】数据总线是双向的,地址总线是单向的。
采用数据和地址线复用,主要靠信号的时序来区分。
通常在读写数据时,在复用的总线上先输出地址信息,然后再传送数据。
第二章习题(教材P43)作业22.9 8086的基本程序执行寄存器是由哪些寄存器组成的?【解】8086的基本程序执行寄存器组成如下:⑴ 8个通用寄存器:可用于存放操作数和指针。
⑵ 4个段寄存器:保存段基值(或段选择子)。
⑶ 1个标志寄存器:保存状态位和控制标志位。
⑷ 1个指令指针寄存器:存放下一条要执行的指令的指针。
2.13 如何形成指令中的各种条件码?【解】指令中的条件码,即标志寄存器中的状态标志。
它们主要由算术和逻辑运算指令设置或清除。
也有设置和清除某些状态标志位的专用指令。
2.16 段寄存器CS=1200H,指令指针寄存器IP=FF00H,此时,指令的物理地址为多少?【解】指令的物理地址 = 1200H×16 + FF00H = 21F00H2.17 8086微处理器的执行部件有什么功能?由哪几部分组成?【解】8086微处理器的执行部件负责指令的执行。
微机原理、汇编与接口技术习题答案 第8章习题答案

微机原理、汇编与接口技术第八章习题答案8.1端口地址为380H~383H 4个A端口基本输入、B端口基本输出的方式控制字为90H,方式控制字寄存器的端口地址为383H。
初始化程序段如下:MOV AL, 90HMOV DX, 383HOUT DX, AL8.2MOV DX, 383HMOV AL, 80H ;3个端口基本输出的方式控制字80HOUT DX, ALMOV AL, 0EH ;PC7置“0”的置位/复位字0EHOUT DX, ALMOV AL, 9 ;PC4置“1”的置位/复位字09HOUT DX, AL8.3stack segment stack 'stack'dw 32 dup(0)stack endsdata segmentBUF DB 0data endscode segmentstart pro farassume ss: stack, cs: code, ds: datapush dssub ax,axpush axMOV ES,AX ;ES为中断向量表的段地址 0000Hmov ax,datamov ds,axMOV DX,383H ;A端口方式1输入MOV AL,0B0HOUT DX,ALMOV AL,9 ;PC4置1,允许A端口中断OUT DX,ALMOV AX,SEG IS8255 ;填写中断向量表MOV ES:01C6H,AXMOV AX,OFFSET IS8255MOV ES:1C4H,AXMOV DX,380H ;A端口的端口地址送DXIN AL,0A1H ;修改中断屏蔽字,允许IQR9中断IND AL,0FDHOUT 0A1H,ALJMP $IN AL,0A1H ;恢复中断屏蔽字,禁止IRQ9中断OR AL,02HOUT 0A1H,ALretIS8255: IN AL,DX ;读键值MOV BUF,AL ;存键值MOV AL,61H ;指定EOI命令OUT 0A0H,ALMOV AL,62HOUT 20H,ALPOP AX ;修改返址INC AXINC AXPUSH AXIRETstart endpcode endsend start8.4控制程序的框图stack segment stack 'stack'dw 32 dup(0)stack endsdata segmentBUF DB 00H, 10H, 10H, 10H ;SEGPT表中位移量为10H处的显示代码为全灭SEGPT DB 40H, 79H, 24H, 30H, 19H, 12H, 2,78HDB 0, 18H, 8, 3, 46H, 21H, 6, 0EH, 7FHKYTBL DB 17H, 27H, 2BH,2DH, 47H, 4BH, 4DH, 87H, 8BHDB 8DH, 8EH, 4EH, 2EH, 1EH, 1DH, 1BHdata endscode segmentstart proc farassume ss: stack, cs: cods, ds: datapush dssub ax, axpush axmov ax, datamov ds, axMOV DX, 383HMOV AL, 81H ;A口基本I/O出、PC H出、PC L入MOV DX, ALMOV DI, 0 ;存键入数的指针DISUP: MOV AH, 88H ;位选值, 从PC H输出, 1位为0, 3位为1 MOV BX, 0DISUP1: MOV CL, BUF [BX] ;取一个显示数XOR AL, ALMOV CH, AL ;将显示数扩展为16位MOV DX, 382HOUT DX, AL ;关显示,七段显示器的共阴极为高电平MOV SI, OFFSET SEGPT ;七段显示代码表的偏移首地址ADD SI, CX ;求得显示数的显示代码的偏移地址MOV AL, [SI] ;取显示代码MOV DX, 380H ;输出显示代码到A口OUT DX, ALMOV AL, AHMOV DX, 382H ;输出显示数位到C口(PC H)OUT DX, ALCALL D1MS ;1ms延时CMP AH, 11H ;是最低数位吗?JE DECKY ;是,转键盘扫描和键译码程序INC BX ;否,指向下一位数的存储地址ROR AH, 1 ;移到下一个数位JMP DISUP1DECKY: MOV AL, 7FHMOV DX, 380HOUT DX, AL ;关显示,七段显示器的七段均为低电平MOV AL, 0F0HMOV DX, 382HOUT DX, AL ;输出,使所有行线为低电平IN AL, DX ;读入键盘列数据AND AL, 0FH ;屏蔽无用位(D7~D4)CMP AL, 0FH ;有键按下吗?JE DISUP ;无键按下,返回显示程序CALL D20MS ;有键按下延时20ms,消除键抖动MOV CX, 4 ;行计数器MOV AH, 10HDECKY1: MOV AL, AHOUT DX, AL ;设置选择的行为低电平IN AL, DX ;输入列数据AND AL, 0F0H ;屏蔽无用位CMP AL, 0F0H ;该行有键按下吗?JNE DECKY2 ;有,转键译码SHL AH, 1 ;无,扫描下一行LOOP DECKY1 ;所有行扫描完成了?否,扫描下一行JMP DISUP ;是,转显示DECKY2: OR AL, AH ;行和列数值合并为键码MOV BX, 0DECKY3: CMP AL, KYTBL [BX] ;查键码表,找到按键吗?JE DECKY4 ;找到按键转DECKY4INC BX ;没找到JMP DECKY3 ;循环查找DECKY4: MOV BUF [DI], BL ;存按键INC DICMP DI, 4 ;存满4位键入数吗?JNE DECKY5 ;未存满,不修改指针MOV DI, 0 ;已存4位,修改指针DECKY5: IN AL, DX ;检测键释放AND AL, 0FHCMP AL, 0FHJNE DECKY5 ;直到键释放CALL D20MS ;消去键释放时的抖动等待20msJMP DISUPretstart endpD1MS PROC ;延时1ms子程序┇RETD1MS ENDPD20MS PROC ;延时20ms子程序┇RETD20MS ENDPcode endsend start8.5stack segment stack 'stack'dw 32 dup(0)stack endscode segmentstart proc farassume ss: stack, cs: codspush dssub ax, axpush axmov ax, datamov ds, axMOV DX, 383HMOV AL, 90H ;A口方式0入,B口和C口方式0出OUT DX, ALMOV DX, 380HIN AL, DX ;从A口读入原码AND AL, AL ;判原码的符号JNS DN ;为正去DNAND AL, 7FH ;为负,取其绝对值MOV DX, 382HOUT DX, AL ;绝对值从C口输出NEG AL ;将负数的绝对值求补DEC DXOUT DX, AL ;负数的补码从B口输出RETDN: INC DX ;正数直接从B口和C口输出OUT DX, ALINC DXOUT DX, ALretstart endpcode endsend start8.68.7设端口地址为380H~383H。
《微机原理与接口技术》第八章作业答案
《微机原理与接口技术》第八章作业一、P292 6、76、有几种方法解决A/D转化器和微机接口中的时间分配问题?各有何特点?答:固定延时等待法,程序查询等待法,中断法(1)固定延时等待法在向A/D发出启动信号后,先根据所采用的A/D转换器所需的转换时间进行软件延时等待,延时程序执行完以后,A/D转换过程也已结束,便可读入数据。
在这种方式中,为了保险起见,通常延时时间应略大于A/D转换所需时间。
缺点:占用较多时间,适合于微处理器任务较少的场合。
优点:可靠性高,不占用查询端口。
(2)程序查询等待法在微处理器发出A/D转换启动命令后,就不断反复测试转换结束信号STS的状态,一旦发现STS有效,就执行输入转换结果数据的指令。
接口简单,CPU同样效率低,且从A/D转换完成到微处理器查询到转换结束并读取数据,可能会有相当大的时延。
(3)中断法当转换完成后,转换结束状态信号STS有效,利用 STS作为中断请求信号,向CPU提出中断申请,当微处理器响应中断,在中断服务程序中执行转换结果数据的读入。
这种方法CPU可与A/D转换器并行工作,效率高,硬件接口简单。
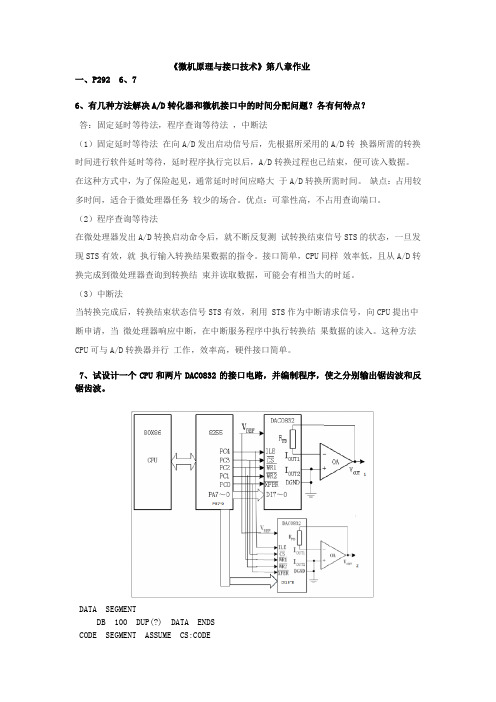
7、试设计一个CPU和两片DAC0832的接口电路,并编制程序,使之分别输出锯齿波和反锯齿波。
DATA SEGMENTDB 100 DUP(?) DATA ENDSCODE SEGMENT ASSUME CS:CODESTART:MOV AX,DATAMOV DS,AXMOV DX,3F3H ;8255A控制口地址MOV AL,80H ;设置8255方式字,PA、PB、OUT DX,AL ;PC均为方式0输出MOV DX,3F2H ;8255A的C口地址MOV AL,10H ;置DAC0832为直通工作方式OUT DX,ALA1:MOV DX,3F0H ;8255A口地址MOV AL,00H ;输出数据初值LOP1:OUT DX,AL ;锯齿波输出INC AL ;修改数据NOPNOPJMP LOP1 ;锯齿波循环MOV DX,3F1H ;8255B口地址MOV AL,0FFH ;输出数据初值LOP2:OUT DX,AL ;反锯齿波输出DEC AL ;修改数据NOPNOPJMP LOP2 ;反锯齿波循环JMP A1CODE ENDSEND START。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“微机系统原理与接口技术”第八章习题解答(部分)
1. 什么叫总线和总线操作?为什么各种微型计算机系统中普遍采用总线结构?
答:总线是模块与模块之间传送信息的一组公用信号线;而模块间信息传送时与总线有关的操作统称为总线操作;模块间完成一次完整信息交换的时间称为一个总线操作周期。
总线标准的建立使得各种符合标准的模块可以很方便地挂在总线上,使系统扩展和升级变得高效、简单、易行。
因此微型计算机系统中普遍采用总线结构。
2.微机总线有哪些种类?其数据传输的主要过程是什么?
答:微机中目前普遍采用的总线标准包括系统内总线标准和系统外总线标准两类:系统内总线标准一般指微机主板插槽(系统扩展板)遵循的各种标准,如PC/XT总线标准、ISA 总线标准(PC/AT总线标准)、VL总线标准(VESA具备总线标准)、PCI局部总线标准等;系统外总线标准指系统互连时遵循的各种标准,多表现为微机对外的标准接口插头,有时也称为接口标准,如EIA RS-232异步串行接口标准、USB通用串行接口标准、IEEE-488通用并行接口标准等。
一个总线操作周期一般分为四个阶段,即:总线请求及仲裁阶段、寻址阶段、传数阶段和结束阶段。
在含有多个主控制器的微机系统中,这四个阶段都是必不可少的;而在仅含一个主控制器的单处理器系统中,则只需要寻址和传数两个阶段。
3.计算机系统与外部设备之间相互连接的总线称为系统外总线(通信总线);用于连接微型机系统内各插件板的总线称为系统内总线(板级总线);CPU内部连接各寄存器及运算部件之间的总线称为片内总线。
4.一次总线的信息传送过程大致可以分为4个阶段,依次为总线请求及仲裁阶段、寻址阶段、传数阶段和结束阶段。
8.同步总线有哪些优点和缺点?主要用在什么场合?
答:同步并行总线时序是指总线上所有信号均以同步时钟为基准,所有接在总线上的设备的信息传输也严格与同步时钟同步。
同步并行总线的优点是简单、易实现;缺点是无法兼容总线上各种不同响应速度的设备,因为同步时钟的速度必须以最慢的响应设备为准,这样总线上的高速设备将无法发挥其高速性能。
同步并行总线一般用于总线上所有设备的响应速度相近的场合。
9.通过联络信号,优点:收发双方不需要同步。
缺点:电路比较复杂,
10.半同步通过同步时钟,实现,并且适当插入等待周期以满足异步访问的要求。
没有等待周期的访问即是零等待。
14.下列陈述中不正确的是()。
A.总线结构传送方式可以提高数据的传输速度
B.与独立请求方式相比,菊花链式查询方式对电路的故障更敏感
C.PCI总线采用同步时序协议和集中式仲裁策略
D.总线的带宽即总线本身所能达到的最高传输速率
答:A。
15. 下列各项中,不是同步总线协定特点的是()。
A.不需要应答信号B.各部件的存取时间比较接近
C.总线长度较短D.总线周期长度可变
答:D。
17.什么叫总线周期、时钟周期、指令周期?它们之间一般有什么关系?
答:时钟周期是系统工作的最小时间单位,它由计算机主频决定;总线周期指总线上两个设备进行一次信息传输所需要的时间(如CPU对存储器或I/O端口进行一次读/写操作所需的时间);指令周期指CPU执行一条指令所需要的时间。
三者之间的关系是:时钟周期是基本动作单位;一个总线周期通常由n个时钟周期组成;而一个指令周期中可能包含有一个或几个总线周期,也可能一个总线周期都没有,这取决于该指令的功能。
18.某系统总线的一个存取周期最快为3个总线时钟周期,在一个总线周期中可以存取32位数据。
若总线的时钟频率为8.33MHz,则总线的带宽为多少MB/s?
答:总线的带宽=数据宽度×总线周期的最高频率
=(32/8)Byte×(8.33/3)M/s
=11.1 MB/s
21.在三线菊花链总线判决系统中,如总线时钟周期为l00ns,每个主控模块的平均传输延时为30ns,试问总线上最多能连几个主控模块?
答:主控模块数目=100ns/30ns+1=4。
注:第一级主控模块无延时。
22.如上题总线系统中实际连了12个平均传输延时为25ns的主控模块,那么总线操作频率最高能允许多少?
答:最高总线操作频率=1/(25ns×11)=3.64KHz。
24. 总线握手的作用是什么?常见的握手协定有哪几种?它们各有什么优缺点?
答:总线握手是指控制总线的主模块和其它模块之间遵照各种协定进行高速而可靠的寻址和数据传输;其作用是控制每个总线周期中数据传送的开始和结束,以实现主、从模块间的协调和配合,保证数据传输的可靠性。
常见的握手协定及其特点如下所述:
a)同步总线协议:系统中采用同一时钟信号作为唯一的开始和结束的控制信号。
采用该协
议的总线其控制简单,便于电路设计且适合高速运行;缺点是如果系统中设备的工作速度相差较远的话,该系统只能按最慢的设备决定总线周期,降低了系统的整体性能。
b)异步总线协议:系统中的主从设备通过问答的方式控制工作过程的开始和结束。
采用该
协议的总线其传输速率可按需要调节,系统适应能力很强;缺点是由于主、从两组联络信号必须在总线上经历两个来回的传送,因此导致的传输延迟是同步总线的两倍。
异步总线本质上要比同步总线速度慢、频带宽、周期长。
c)半同步总线协议:综合考虑了同步、异步总线协定的优劣而产生的混合方式,它兼备同
步总线的高速和异步总线的可靠性与适应性。
对快速外设就好像同步总线一样,仅由时钟控制总线周期的起始;对慢速设备则像是异步总线,利用W AIT信号改变总线周期的长度。
d)周期分裂式总线协议:总线写操作仍由单个子周期一次完成,而总线读周期被分解为两
个独立的传输子周期(第一个子周期由主控设备发命令和地址并加以确认,第二个子周期主控设备从总线上读数据),两个子周期之间的空闲时间(受控设备准备数据的时间)可以出让给系统中其他主控器使用。
当系统中有多个主控器时,采用该协议可以充分发挥多主控器并行运行的优势,既能适应慢速外设,又能保持快速传输;缺点是增加了主、从模块的复杂性。
31.在ISA总线上进行16位数据传送需要哪些控制信号?
答:除地址信号(SA0~SA19、LA17~LA23)和数据信号(SD0~SD15)外可能还需
要以下控制信号:
●与存储器操作有关的控制信号:(/SMEMR)/(/SMEMW)或(/MEMR)/(/MEMW)、
/MEM CS16
●与I/O操作有关的控制信号:(/IOR)/ (/IOW)、/IO CS16
●地址锁存信号BALE、数据高字节有效信号SBHE、用于插入等待周期的I/O CH RDY,
以及DMA地址允许信号。
在这些控制信号中,/MEM CS16、/IO CS16以及SBHE信号
是8位数据传送时不需要的。