基于区域增长的点云分割方法
点云分割方法
点云分割方法
点云分割是一种将三维点云数据分成若干个较小部分的技术,以便于更好地理解数据和提取特征。
以下是几种常见的点云分割方法:
1. 基于区域增长的分割:该方法从一个种子点开始,逐步将相邻的点加入到分割区域中,直到没有更多的相邻点可以加入。
这种方法需要确定起始种子点和增长的停止条件,可能受到噪声和数据密度的影响。
2. 基于曲面的分割:该方法通过拟合一个曲面来将点云分割成不同的部分。
通常使用最小二乘法或其他优化算法来拟合曲面,然后根据曲面将点云分成不同的部分。
这种方法对于具有明显表面结构的点云数据非常有效。
3. 基于密度的分割:该方法根据点的密度将点云分成不同的部分。
密度较高的区域被视为一个整体,密度较低的区域则被排除在外。
这种方法可能需要确定密度阈值和聚类算法。
4. 基于移动最小二乘法(MLS)的分割:该方法通过拟合一个局部逼近曲面来将点云分成不同的部分。
该曲面是通过移动最小二乘法得到的,可以根据需要调整曲面的平滑度和局部逼近精度。
5. 基于神经网络的分割:近年来,基于神经网络的分割方法成为了研究的
热点。
这些方法使用深度学习技术来自动学习和识别点云的分割模式。
常见的网络结构包括卷积神经网络(CNN)和循环神经网络(RNN)。
以上是几种常见的点云分割方法,每种方法都有其优点和适用范围。
在实际应用中,可以根据具体需求选择适合的分割方法。
点云常用分割方法
点云常⽤分割⽅法点云分割 点云分割可谓点云处理的精髓,也是三维图像相对⼆维图像最⼤优势的体现。
点云分割的⽬的是提取点云中的不同物体,从⽽实现分⽽治之,突出重点,单独处理的⽬的。
⽽在现实点云数据中,往往对场景中的物体有⼀定先验知识。
⽐如:桌⾯墙⾯多半是⼤平⾯,桌上的罐⼦应该是圆柱体,长⽅体的盒⼦可能是⽜奶盒......对于复杂场景中的物体,其⼏何外形可以归结于简单的⼏何形状。
这为分割带来了巨⼤的便利,因为简单⼏何形状是可以⽤⽅程来描述的,或者说,可以⽤有限的参数来描述复杂的物体。
⽽⽅程则代表的物体的拓扑抽象。
于是,RanSaC算法可以很好的将此类物体分割出来。
1、RanSaC算法 RanSaC算法(随机采样⼀致)原本是⽤于数据处理的⼀种经典算法,其作⽤是在⼤量噪声情况下,提取物体中特定的成分。
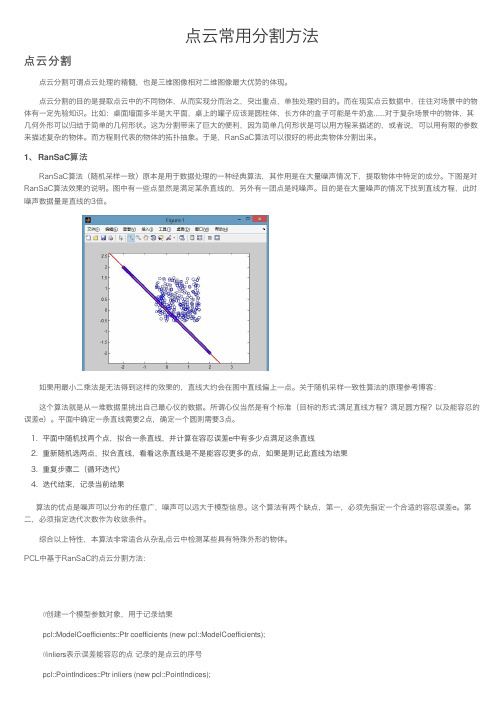
下图是对RanSaC算法效果的说明。
图中有⼀些点显然是满⾜某条直线的,另外有⼀团点是纯噪声。
⽬的是在⼤量噪声的情况下找到直线⽅程,此时噪声数据量是直线的3倍。
如果⽤最⼩⼆乘法是⽆法得到这样的效果的,直线⼤约会在图中直线偏上⼀点。
关于随机采样⼀致性算法的原理参考博客: 这个算法就是从⼀堆数据⾥挑出⾃⼰最⼼仪的数据。
所谓⼼仪当然是有个标准(⽬标的形式:满⾜直线⽅程?满⾜圆⽅程?以及能容忍的误差e)。
平⾯中确定⼀条直线需要2点,确定⼀个圆则需要3点。
1. 平⾯中随机找两个点,拟合⼀条直线,并计算在容忍误差e中有多少点满⾜这条直线2. 重新随机选两点,拟合直线,看看这条直线是不是能容忍更多的点,如果是则记此直线为结果3. 重复步骤⼆(循环迭代)4. 迭代结束,记录当前结果算法的优点是噪声可以分布的任意⼴,噪声可以远⼤于模型信息。
这个算法有两个缺点,第⼀,必须先指定⼀个合适的容忍误差e。
第⼆,必须指定迭代次数作为收敛条件。
综合以上特性,本算法⾮常适合从杂乱点云中检测某些具有特殊外形的物体。
PCL中基于RanSaC的点云分割⽅法:1. //创建⼀个模型参数对象,⽤于记录结果2. pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);3. //inliers表⽰误差能容忍的点记录的是点云的序号4. pcl::PointIndices::Ptr inliers (new pcl::PointIndices);5. // 创建⼀个分割器6. pcl::SACSegmentation<pcl::PointXYZ> seg;7. // Optional8. seg.setOptimizeCoefficients (true);9. // Mandatory-设置⽬标⼏何形状0. seg.setModelType (pcl::SACMODEL_PLANE);1. //分割⽅法:随机采样法2. seg.setMethodType (pcl::SAC_RANSAC);3. //设置误差容忍范围4. seg.setDistanceThreshold (0.01);5. //输⼊点云6. seg.setInputCloud (cloud);7. //分割点云8. seg.segment (*inliers, *coefficients);除了平⾯以外,PCL⼏乎⽀持所有的⼏何形状。
基于区域增长算法的三维模型分割技术研究

基于区域增长算法的三维模型分割技术研究在城市规划与建筑设计中,三维模型被广泛应用于可视化分析、仿真演示等方面。
然而,对于大规模的三维模型,要进行有效的分割,以达到更好的可视化效果,是一项复杂且困难的任务。
而区域增长算法作为一种常用的三维模型分割技术,正逐渐成为研究的热点。
一、区域增长算法区域增长算法是一种基于像素或者像素点云的分割方法,它依赖于一个种子点或者种子区域开始,以相邻像素或者像素点云的相似性为依据,逐渐将相似的像素或点归为同一个区域,直到整个图像或点云被完全分割出为止。
区域增长算法主要包括两个步骤:种子点的选择和区域增长过程。
种子点的选择通常由人工进行,灵活性高,但耗时耗力,不能适用于大规模的三维模型分割。
因此,研究者们提出了基于自适应方式的种子点选择算法,例如基于曲率、法线向量等,以自动化的方式选择种子点。
区域增长过程主要利用像素或点相似性判定是否属于同一区域。
常见的相似性判定方法包括颜色、灰度值、几何特征等,也可以综合多种相似性判定方法进行分割。
二、区域增长算法在三维模型分割中的应用区域增长算法在三维模型分割中应用十分广泛。
例如,基于点云的区域增长算法可以用于进行建筑物立面分割,将建筑物墙面、窗户、门等部位分割出来,以达到更好的可视化效果。
基于网格的区域增长算法也可以应用于建筑物分割,例如将轮廓线比较明显的建筑物分割出来,以便于进行仿真演示和设计优化。
此外,区域增长算法还可以用于对生物模型进行分割,例如分割出动物的不同器官和组织,以便于进行研究和治疗。
三、区域增长算法的优缺点区域增长算法具有以下优点:1. 可以自动对大规模三维模型进行分割,减轻了人工干预的负担。
2. 灵活性高,可以根据不同需要选择不同的相似度判定方法。
3. 分割结果可以被自然地表示为区域。
然而,区域增长算法也存在一些不足:1. 对于不规则形状或存在遮挡的物体,分割结果可能不准确。
2. 对于平面分割或曲面分割,需要比较复杂的算法,增加了计算量和算法复杂度。
pcl分割算法

PCL(Point Cloud Library)中常用的点云分割方法有:1. Planar model segmentation(平面模型分割):该算法能够把地面等一些平面给分割出来,方便后面的物体的点云分割。
2. Cylinder model segmentation(圆柱模型分割):该算法能够把一些圆柱体分割出来,方便后面的物体的点云分割。
3. Euclidean Cluster Extraction(欧几里德聚类提取):通俗来讲就是先从点云中找出一个点p0,然后寻找p0周围最近的n个点,如果这n个点与p0之间的距离小于预先设定的阈值,那么就把这个点取出,依次重复。
4. Region growing segmentation(区域蔓延分割):对于普通点云,其可由法线、曲率估计算法获得其法线和曲率值。
通过法线和曲率来判断某点是否属于该类,向周边蔓延直至完成。
5. pcl::RegionGrowing:使用了一种基于区域增长的方法来分割点云数据,该算法使用一种增长策略,将种子点作为开始点,不断将邻近点添加到同一个区域中。
6. pcl::RegionGrowingRGB:基于RGB颜色信息进行区域生长分割的模块,它基于局部颜色相似性度量邻域内点之间的相似性,并在此基础上将相似的点合并成一个聚类。
7. pcl::SACSegmentation:用于估计点云中符合特定模型的参数以及对应的点集。
它支持对于多种基础的模型进行拟合,如平面、球、圆柱、圆锥等。
SACSegmentation采用随机抽样一致性(RANSAC)算法来实现,可以在噪声点云数据中快速鲁棒地估计模型参数。
以上信息仅供参考,如需了解更多信息,请查阅PCL官方文档或咨询专业人士。
点云分割的五种方法

点云分割的五种方法点云分割是计算机视觉领域中的一个重要任务,它旨在将三维点云数据分割成不同的部分或物体。
点云分割在许多领域中都有广泛的应用,比如自动驾驶、机器人导航和三维重建等。
下面将介绍五种常见的点云分割方法。
第一种方法是基于几何特征的点云分割。
这种方法利用点云的几何特征,比如法向量、曲率等信息来进行分割。
通过计算点云中每个点的几何特征,并根据这些特征将点云分成不同的部分。
这种方法简单直观,但对于复杂的点云数据可能不够准确。
第二种方法是基于颜色的点云分割。
这种方法利用点云中每个点的颜色信息来进行分割。
通过计算点云中每个点的颜色特征,并根据这些特征将点云分成不同的部分。
这种方法适用于具有明显颜色差异的点云数据,比如彩色点云。
第三种方法是基于深度学习的点云分割。
这种方法利用深度学习模型,如卷积神经网络(CNN)或自编码器(AE),对点云进行学习和分割。
通过输入大量的标记点云数据训练深度学习模型,然后使用该模型对未标记点云数据进行分割。
这种方法在准确性方面表现出色,但需要大量的标记数据和计算资源。
第四种方法是基于区域生长的点云分割。
这种方法从一个种子点开始,逐渐将与该种子点相邻的点加入到同一个区域中,直到达到预设的条件为止。
这种方法适用于具有连续性的点云数据,比如平面或曲面。
第五种方法是基于图论的点云分割。
这种方法将点云看作一个图,其中每个点表示一个节点,点之间的连接表示它们之间的关系。
通过在该图上进行图论算法,如最小生成树或最大流最小割,将点云分成不同的部分。
这种方法可以有效地处理点云数据的连通性和噪声问题。
点云分割是计算机视觉中的一个重要任务,有许多不同的方法可以实现。
每种方法都有其优缺点,适用于不同类型的点云数据。
在实际应用中,需要根据具体问题的要求选择合适的方法。
随着计算机视觉和深度学习的发展,点云分割的方法将会不断进步和改进,为更广泛的应用场景提供更好的解决方案。
点云表面分割几何算法

点云表面分割几何算法是处理3D点云数据的重要技术之一,其目标是将点云数据分割成多个连续的、几何形状简单的部分。
以下是一些常用的点云表面分割几何算法:
1. 基于表面拟合的分割:这种方法通过拟合一个或多个曲面来分割点云数据。
首先,它会在点云数据中寻找出曲率变化较大的区域作为分割边界,然后将这些边界内的点云数据分别拟合出不同的曲面,从而实现分割。
2. 基于体素网格的分割:这种方法将点云数据映射到一个规则的体素网格上,然后根据体素网格中的值来进行分割。
具体来说,它会将点云数据中的每个点都映射到一个体素网格中的单元格上,然后将每个单元格中的点云数据归为一个聚类,最后根据聚类的结果来分割点云数据。
3. 基于区域增长的分割:这种方法会从点云数据中的某个点开始,不断扩展周围点的范围,形成一个连续的区域,直到达到预设的分割条件为止。
具体来说,它会根据点的密度、曲率等特征来选择扩展的方向和范围,从而得到不同的分割区域。
4. 基于水平集的分割:这种方法将点云数据看作是二维流场中的一个曲面,然后通过演化曲面来得到分割结果。
具体来说,它会根据曲面的高程、方向等特征来计算演化速度和方向,从而得到不同高度的分割区域。
这些算法各有优缺点,选择合适的算法需要根据具体的应用场景和需求来决定。
结合平面模型与区域增长的矿石点云分割

^m m m m2021年第04期(总第220期)结合平面模型与区域增长的矿石点云分割王鹏,邓彬,李柏阳(湖北工业大学电气与电子工程学院,湖北武汉430068)摘要:为了解决传统固定式破碎机在矿山井下利用石块三维信息来实现自动碎石的过程中出现的石块点云过拟合成平 面,造成石块三维信息缺失的情况。
文章提出了基于背景模型的方法获取石块的三维信息。
利用破碎区域石块背景的 不变性,将获取的石块点云与背景比较并过滤掉背景部分,最后利用区域增长算法对石块点云分割。
实验结果表明,相 比于基于平面模型与区域增长法,改进后的分割方法效果与鲁棒性更高。
关键词:TOF ;三维点云;点云滤波;区域增长;点云分割中图分类号:TP 391 文献标识码:B 文章编号=2096-9759(2021)04-0038-04Segmentation of ore point cloud combining plane model and area growthWang Peng,Deng Bin, LiBoyang(Hubei U niversity o f Technology School o f Electrical and Engineering ,Wuhan ,430068,China )Abstact: In order to solve the problem that the traditional fixed crusher uses the three-dimensional inform ation o f the stone inthe underground mine to realize the automatic crushing o f the stone , the point cloud o f the stone appears to be over-fitted to the plane , w hich causes the lack o f three-dimensional inform ation o f t he stone . This paper proposes a method based on background model to obtain 3D inform ation o f rocks . Using the invariance o f the stone background in the broken area , the obtained stone point cloud is compared w ith the background and the background part is filtered out , and fin a lly the area growth algorithm is used to segment the stone point cloud . The experimental results show that the improved segmentation method is more effective and robust compared to the plane model and region growing method .Keywords :TOF ; 3D point cloud ; point cloud flltering;regional growth ; Point cloud segmentation随着工业自动化[1]的发展,无人操作化的趋势更加明显。
点云单木分割 区域生长算法
点云单木分割区域生长算法全文共四篇示例,供读者参考第一篇示例:点云单木分割是数字林业学中的一个重要研究领域,它通过处理激光扫描获取的点云数据,实现将林地中的各个个体树木进行分割和识别。
区域生长算法是点云处理中的一种常用算法,它基于相邻点之间的相似性和连续性,对点云数据进行区域分割和生长,实现对单木进行分割的目的。
本文将介绍点云单木分割的背景及意义,重点介绍区域生长算法的原理和实现方法。
一、点云单木分割的背景及意义随着数字林业学的发展,利用激光扫描技术获取林地信息已经成为一种重要的手段。
激光扫描技术能够高效地获取林木结构的三维信息,为林地资源管理和保护提供了有效的数据支持。
激光扫描获取的点云数据通常包含大量的信息,其中包含了不同个体树木的信息,如何对这些点云数据进行单木分割成为研究的热点问题。
点云单木分割的目的是将点云数据中的林木进行有效地分割,实现对单木的识别和建模。
这对于林地资源管理和保护具有重要的意义,可以帮助林业人员对林地结构和环境进行详细的分析和评估,为合理的资源利用和保护提供科学依据。
二、区域生长算法的原理区域生长算法是一种基于种子生长的点云分割算法。
其主要思想是将种子点作为起始点,通过种子点与相邻点之间的相似性判断,不断地生长形成一个区域。
通过不断地将相邻点加入到区域中,从而实现对点云数据的区域分割和生长。
具体来说,区域生长算法的步骤如下:2. 生长:从候选点集合中选择一个点作为当前点,计算当前点与种子区域中所有点的相似性。
若当前点与种子区域中的某个点的相似性满足一定条件,则将当前点加入到种子区域中,并将当前点的相邻点加入到候选点集合中。
3. 终止条件:当候选点集合为空或者种子区域的大小达到预设的阈值时,终止生长。
4. 输出结果:得到一个经过区域生长处理的点云区域,即为一个单独的树木。
1. 相似性判断:区域生长的关键在于如何判断点与区域中的点的相似性。
通常可以使用点之间的欧式距离、法向量差异等指标来进行相似性判断,以确定是否将点加入到种子区域中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于区域增长的点云分割方法
介绍
点云是由大量的三维空间中的点构成的数据形式,广泛应用于计算机视觉、三维重建和机器人导航等领域。
点云分割是将点云数据划分为不同的区域或对象的过程。
基于区域增长的点云分割方法是一种常见的点云分割算法,其通过根据一组特定的准则将相邻点合并成区域,从而实现点云的分割。
算法流程
基于区域增长的点云分割算法主要包括以下几个步骤:
步骤一:点云预处理
在进行点云分割之前,通常需要对点云数据进行预处理。
预处理包括点云滤波、降采样、法向量计算等操作,以提高点云数据的质量和准确性。
步骤二:种子点选择
在种子点选择阶段,通过一定的准则选取一些代表性的点作为起始点。
种子点的选择对于分割结果的准确性和效率具有重要的影响。
步骤三:区域生长
在区域生长阶段,根据一组特定的准则将与种子点相邻的点合并到同一个区域中。
这些准则可以包括点之间的距离、法向量之间的差异、颜色之间的差异等。
步骤四:区域合并
在区域合并阶段,将相邻的区域合并成更大的区域,以得到更完整的分割结果。
区域合并可以使用不同的方法,如基于几何特征的合并、基于拓扑关系的合并等。
步骤五:后处理
在分割完成后,通常需要进行一些后处理操作。
后处理可以包括去除无效区域、填补空洞、提取特征等。
实验与应用
基于区域增长的点云分割方法已在许多实际应用中得到了广泛应用。
以下是一些实验和应用的案例:
1. 三维重建
基于区域增长的点云分割方法可以用于三维重建中的点云分割和对象提取。
通过将相邻的点合并成区域,可以提取出各个对象的点云数据,从而实现三维重建。
2. 目标检测与识别
在计算机视觉领域,基于区域增长的点云分割方法可以用于目标检测和识别。
通过将同属于一个对象的相邻点合并成区域,可以提取出目标的点云数据,从而实现目标检测和识别。
3. 机器人导航
在机器人导航中,基于区域增长的点云分割方法可以用于环境感知和路径规划。
通过将相邻的点合并成区域,可以提取出障碍物的点云数据,从而实现机器人对环境的感知和路径规划。
优缺点分析
基于区域增长的点云分割方法具有以下优点:
•算法简单直观,易于实现和理解。
•能够根据点之间的几何、颜色和法向量等特征进行分割。
•分割结果能够较好地保留对象的边界和结构细节。
然而,基于区域增长的点云分割方法也存在一些缺点:
•参数设置对分割结果具有较大的影响,需要进行调优。
•对于复杂的场景和噪声点,分割结果可能出现误分割的情况。
•对于不同大小和形状的对象,分割效果可能存在差异。
总结
基于区域增长的点云分割方法是一种常见且有效的点云分割算法。
通过合并相邻点形成区域,该方法能够实现对点云数据的分割,并在三维重建、目标检测与识别、机器人导航等领域得到广泛应用。
然而,该方法也存在一些缺点,需要在实际应用中进行参数调优和误分割处理。
未来,可以进一步研究如何提高基于区域增长的点云分割算法的准确性和鲁棒性,以满足更多实际应用的需求。