点云地面分割代码
一种基于栅格投影的快速地面点云分割算法

中图分类号:P225.2
No.3
文献标识码:A
一种基于栅格投影的快速地面点云分割算法
邹兵 ∗ ꎬ陈鹏ꎬ刘登洪
( 重庆市勘测院ꎬ重庆 401520)
摘 要:针对激光雷达不同类型点云在不同场景下存在地面点云过分割和欠分割的问题ꎬ本文提出一种能够适用于
不同类型点云的地面分割算法ꎬ该算法先将原始点云栅格化ꎬ然后计算栅格单元高度差、平均高度和高度方差信息ꎬ综
都出现了不同程度的过分割或者欠分割ꎬ文献[ 3] 基
果ꎬ然而文献[3] 基于物理排序的方法不再适用ꎬ同时
苛ꎬ导致地面分割不彻底ꎬ然而文献[ 10] 基于平面模
步表明本文算法的有效性ꎮ
型拟合的算法ꎬ因需要设置点到平面的距离阈值参数ꎬ
导致在地面点和非地面点交接处分割效果不理想ꎬ将
非地面点云判定为地面点ꎬ导致过分割ꎮ
合三个分割指标实现地面点云准确快速分割ꎮ 分别采用 KITTI 开源数据集和实测数据进行实验验证ꎬ结果表明本文
算法针对不同类 型 点 云 在 不 同 场 景 下 均 实 现 了 良 好 的 地 面 分 割 效 果ꎬ 平 均 分 割 准 确 度 达 到 99 10%ꎬ 平 均 耗 时
13.169 7 msꎬ提升了自动驾驶汽车感知系统的鲁棒性和实时性能ꎮ
(2) 计算栅格单元 ceil( iꎬj) 的高度差:
Z diff( iꎬj) = z max -z min
(3)
式中ꎬz max 和 z min 分别为栅格单元 ceil( iꎬj) 的高度
的最大值和最小值ꎬ为了抵抗点云噪声影响ꎬ本文选取
图 2 本文算法分割效果( 红色为地面点云ꎬ绿色为非地面点云)
第3期
邹兵等 一种基于栅格投影的快速地面点云分割算法
python pcd去除地面点算法

处理点云数据时,一个常见的任务是去除地面点。
这通常用于在三维重建或点云分析中,以减少不必要的地面点并简化数据集。
以下是一个基本的算法,使用Python和PCL库(Python Point Cloud Library)去除地面点。
首先,你需要安装python-pcl库。
如果你还没有安装,可以使用pip进行安装:bashpip install python-pcl然后,你可以使用以下代码来去除地面点:pythonimport pclimport numpy as npdef remove_ground_plane(cloud, ground_normal_threshold=0.01):# 创建一个法线估算对象ne = cloud.make_NormalEstimation()tree = cloud.make_kdtree()ne.set_SearchMethod(tree)ne.set_RadiusSearch(0.03) # 设置为半径搜索的参数cloud_normals = pute() # 计算法线# 创建一个地面平面估计对象gp3 = cloud_normals.make_GroundPlaneEstimation()gp3.set_NormalDistanceWeight(0.1) # 设置法线距离权重gp3.set_Method(mon.methods.天堂四面体) # 设置方法为天堂四面体gp3.set_SearchRadius(0.02) # 设置搜索半径gp3.set_InputCloud(cloud) # 设置输入的点云数据gp3.set_InputNormals(cloud_normals) # 设置输入的法线数据plane = gp3.process() # 计算地面平面参数# 如果平面距离小于阈值,则认为该点为地面点,进行去除ground_plane = plane.get_plane()if ground_plane.get_distance_to_plane(cloud.get_centroid()) < ground_normal_threshold:return cloud.get_filtered_indices() # 返回地面点的索引列表else:return [] # 如果不满足条件,返回空列表在这个代码中,remove_ground_plane函数接收一个点云对象和一个法线阈值作为输入。
chapter08_地面三维激光雷达点云分割与分类
图 8.4 模糊 C-均值聚类
(3) 均值飘移聚类(Mean-Shift)。
5
均值飘移聚类是基于密度的聚类算法,它没有假定聚类中心,均值漂移过 程不需要预先给出类别数目,而是根据点集自身的密度分布探测获得类簇,发 现任意形状的簇,在聚类过程中自动确定类别数。 对于一个欧式空间内的点集,无参密度估计方法根据一个点周围一个小区 域内点的分布情况来估计点集中该点位置的密度;类似的,均值飘移聚类对空 间中某一位置密度梯度的估计采用统计该位置周围小区域内的点的分布状况。 空间中任意位置梯度的方向即是密度增加最快的方向。均值飘移聚类根据梯度 将空间中的点沿梯度方向不断移动,直到梯度为零。最终散布在整个空间的点 移动到模式点的地方。每个这样的点是所有移动到它的点所覆盖的区域内密度 最大的点,该处的梯度为零。 Mean-shift 的 定 义 为 : 给 定 的 d 维 欧 式 空 间 R d , 对 于 点 数 据 集 = S {xi,,,, = i 1 2 … n} ,带有核函数 K ( x ) 和核窗口范围 h 的多元核密度估计函 数为: f (x ) = 1 nh d
N
∑u
i =1
N
m ij
(式 8-3)
u ij =
1
∑( x
p k =1
i
−cj
xi − c k
)
2 m −1
(式 8-4)
一般地,模糊聚类的算法可表述为: 1) 确定划分的类数 C ,设置迭代阈值 ε ; 2) 初始化模糊划分矩阵 µ ij ;
(t )
3) 根据模糊划分矩阵计算各类的类中心 c j ; 4) 根 据 目 标 函 数 J 的 约 束 , 更 新 模 糊 划 分 矩 阵 µ ij
6
点云常用分割方法
点云常⽤分割⽅法点云分割 点云分割可谓点云处理的精髓,也是三维图像相对⼆维图像最⼤优势的体现。
点云分割的⽬的是提取点云中的不同物体,从⽽实现分⽽治之,突出重点,单独处理的⽬的。
⽽在现实点云数据中,往往对场景中的物体有⼀定先验知识。
⽐如:桌⾯墙⾯多半是⼤平⾯,桌上的罐⼦应该是圆柱体,长⽅体的盒⼦可能是⽜奶盒......对于复杂场景中的物体,其⼏何外形可以归结于简单的⼏何形状。
这为分割带来了巨⼤的便利,因为简单⼏何形状是可以⽤⽅程来描述的,或者说,可以⽤有限的参数来描述复杂的物体。
⽽⽅程则代表的物体的拓扑抽象。
于是,RanSaC算法可以很好的将此类物体分割出来。
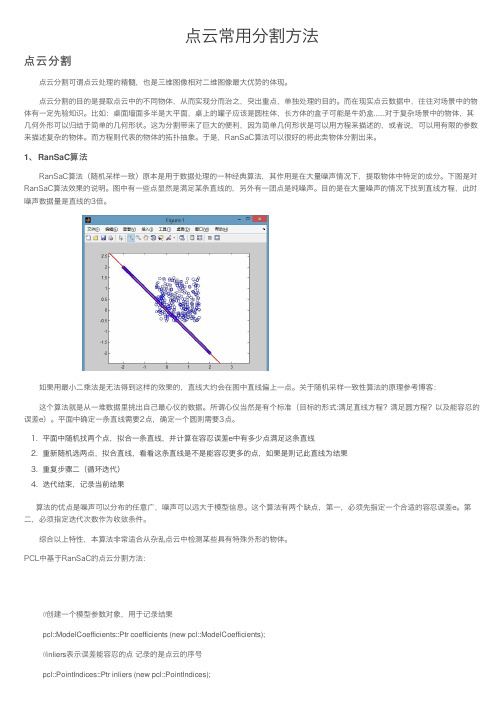
1、RanSaC算法 RanSaC算法(随机采样⼀致)原本是⽤于数据处理的⼀种经典算法,其作⽤是在⼤量噪声情况下,提取物体中特定的成分。
下图是对RanSaC算法效果的说明。
图中有⼀些点显然是满⾜某条直线的,另外有⼀团点是纯噪声。
⽬的是在⼤量噪声的情况下找到直线⽅程,此时噪声数据量是直线的3倍。
如果⽤最⼩⼆乘法是⽆法得到这样的效果的,直线⼤约会在图中直线偏上⼀点。
关于随机采样⼀致性算法的原理参考博客: 这个算法就是从⼀堆数据⾥挑出⾃⼰最⼼仪的数据。
所谓⼼仪当然是有个标准(⽬标的形式:满⾜直线⽅程?满⾜圆⽅程?以及能容忍的误差e)。
平⾯中确定⼀条直线需要2点,确定⼀个圆则需要3点。
1. 平⾯中随机找两个点,拟合⼀条直线,并计算在容忍误差e中有多少点满⾜这条直线2. 重新随机选两点,拟合直线,看看这条直线是不是能容忍更多的点,如果是则记此直线为结果3. 重复步骤⼆(循环迭代)4. 迭代结束,记录当前结果算法的优点是噪声可以分布的任意⼴,噪声可以远⼤于模型信息。
这个算法有两个缺点,第⼀,必须先指定⼀个合适的容忍误差e。
第⼆,必须指定迭代次数作为收敛条件。
综合以上特性,本算法⾮常适合从杂乱点云中检测某些具有特殊外形的物体。
PCL中基于RanSaC的点云分割⽅法:1. //创建⼀个模型参数对象,⽤于记录结果2. pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);3. //inliers表⽰误差能容忍的点记录的是点云的序号4. pcl::PointIndices::Ptr inliers (new pcl::PointIndices);5. // 创建⼀个分割器6. pcl::SACSegmentation<pcl::PointXYZ> seg;7. // Optional8. seg.setOptimizeCoefficients (true);9. // Mandatory-设置⽬标⼏何形状0. seg.setModelType (pcl::SACMODEL_PLANE);1. //分割⽅法:随机采样法2. seg.setMethodType (pcl::SAC_RANSAC);3. //设置误差容忍范围4. seg.setDistanceThreshold (0.01);5. //输⼊点云6. seg.setInputCloud (cloud);7. //分割点云8. seg.segment (*inliers, *coefficients);除了平⾯以外,PCL⼏乎⽀持所有的⼏何形状。
LiDAR360软件地基点云数据单木分割
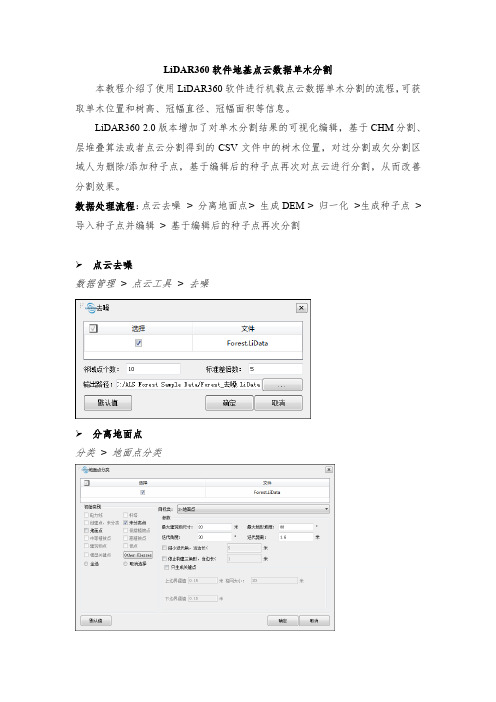
LiDAR360软件地基点云数据单木分割本教程介绍了使用LiDAR360软件进行机载点云数据单木分割的流程,可获取单木位置和树高、冠幅直径、冠幅面积等信息。
LiDAR360 2.0版本增加了对单木分割结果的可视化编辑,基于CHM分割、层堆叠算法或者点云分割得到的CSV文件中的树木位置,对过分割或欠分割区域人为删除/添加种子点,基于编辑后的种子点再次对点云进行分割,从而改善分割效果。
数据处理流程:点云去噪>分离地面点>生成DEM >归一化>生成种子点>导入种子点并编辑> 基于编辑后的种子点再次分割➢点云去噪数据管理> 点云工具> 去噪➢分离地面点分类> 地面点分类LiDAR360 2.0版本对地面点滤波的效果进行了改进,同时界面上增加了两个阈值设置和只生成模型关键点的复选框:✧减小迭代角,当边长<:当三角形的边长小于给定的阈值时,相应减小迭代角度;✧停止构建三角形,当边长<:当三角形的边长小于给定的阈值时,停止此区域的三角形迭代。
生成模型关键点的目的在于保留地形上的关键点而相对抽稀平缓地面区域的点,从而得到保留地形上关键点的稀疏点集。
在建立DEM模型时既可以保证地形不损失,又可以相对提高速率。
相关阈值设置如下:✧上边界阈值:由原始点所组成的三角网模型上所允许的最大高程容差值,简单来讲,此值设置越大,提取的模型关键点越稀疏,反之,越密。
✧下边界阈值:由原始点所组成的三角网模型下所允许的最大高程容差值,简单来讲,此值设置越大,提取的模型关键点越稀疏,反之,越密。
✧格网大小:保证提取模型关键点之后的密度,在平坦地区也能保证所设置的点密度。
例如,想要保证每隔10m有一个点那么就将此值设置为10。
➢生成DEM地形> 数字高程模型➢归一化数据管理> 点云工具> 归一化➢生成种子点生成种子点的方式有2种:1)层堆叠算法;2)基于CHM分割。
车载点云地面提取优化

车载点云地面提取优化车载点云地面提取优化车载点云地面提取是一项重要的任务,可以用于高精度地图制作、自动驾驶和交通监控等应用。
在本文中,我将逐步介绍车载点云地面提取的优化方法。
第一步是数据预处理。
我们需要从车载传感器(如激光雷达)获取原始点云数据。
这些数据通常包含大量的噪声和无效点。
在进行地面提取之前,我们需要对数据进行滤波和去噪处理,以减少这些干扰因素的影响。
第二步是点云分割。
在这一步中,我们将点云数据分割成地面和非地面两个部分。
传统的方法是使用统计特征(如点的高度和法向量)来进行分割。
然而,这些方法通常无法处理复杂的道路结构和地形变化。
因此,我们需要采用更先进的算法,如基于深度学习的方法,来提高地面提取的准确性和鲁棒性。
第三步是地面平面拟合。
在这一步中,我们将对地面点云进行平面拟合,以估计地面的几何模型。
常用的拟合方法包括最小二乘法和最小二乘平面拟合。
通过拟合得到的地面模型,我们可以进一步分析地面的特征和属性。
第四步是地面点云优化。
在这一步中,我们将对地面点云进行优化,以提高地面提取的精度和完整性。
优化的方法包括基于几何特征的点云重采样、点云配准和点云融合等。
通过优化,我们可以消除地面点云中的噪声和伪影,提高地面提取的质量。
最后一步是结果评估和验证。
在这一步中,我们将对提取得到的地面进行评估和验证。
评估的指标包括地面点云的覆盖率、准确性和鲁棒性等。
通过评估和验证,我们可以了解地面提取算法的性能和局限性,并进一步改进和优化算法。
总之,车载点云地面提取是一个复杂而关键的任务。
通过数据预处理、点云分割、地面平面拟合、地面点云优化和结果评估等步骤,我们可以提高地面提取的准确性和鲁棒性,为自动驾驶和交通监控等应用提供更可靠的基础。
matlab点云分割算法
matlab点云分割算法点云分割是计算机视觉和机器人技术领域中的重要任务,用于将点云数据集划分为具有不同属性或结构的子集。
MATLAB是一种功能强大的编程语言和环境,提供了丰富的工具箱和函数,可用于点云处理和分析。
本文将介绍如何使用MATLAB实现点云分割算法,并提供一个示例以展示其应用。
一、介绍点云是由三维空间中的大量点构成的集合,可用于表示物体的表面形状或场景的几何结构。
在许多应用中,需要对点云进行分割,以识别不同的物体或场景元素。
点云分割算法可以将点云数据集划分为具有相似属性或结构的子集,从而便于后续处理和分析。
二、MATLAB点云处理工具箱MATLAB提供了点云处理工具箱,其中包含了许多用于点云处理和分割的函数和工具。
使用这些函数和工具,可以实现从点云数据中提取特征、计算点云间的距离、拟合曲线和平面等操作,进而实现点云的分割和识别。
三、MATLAB点云分割算法MATLAB点云处理工具箱中包含了一些常用的点云分割算法,例如基于区域的生长算法、基于聚类的算法、基于曲率的算法等。
在实际应用中,可以根据点云数据的特点和分割需求选择合适的算法。
下面以基于区域的生长算法为例进行说明。
(此处可以进一步展开,详细介绍算法原理和步骤,以及如何使用MATLAB实现算法)四、示例应用为了更好地理解MATLAB点云分割算法的应用,下面给出一个实际的示例。
假设有一个点云数据集表示一个室内场景,我们希望将该点云分割为墙壁、地板和家具等不同的子集。
(可以描述具体的数据集,展示如何使用MATLAB进行点云分割的过程,并给出实验结果和分割效果的评估)五、总结本文介绍了MATLAB点云分割算法的基本概念和方法,并提供了一个示例以展示其应用。
通过使用MATLAB点云处理工具箱中丰富的函数和工具,我们可以轻松实现点云分割任务,并应用于计算机视觉和机器人技术等领域。
(可以总结算法的优势和不足,并展望未来的发展方向)六、参考文献[1] XYZ, "Title of the Paper", Journal name, year.[2] ABC, "Title of the Book", Publisher, year.(列出参考文献,供读者进一步学习和研究)以上是对MATLAB点云分割算法的简要介绍和应用示例。
pcl分割算法

PCL(Point Cloud Library)中常用的点云分割方法有:1. Planar model segmentation(平面模型分割):该算法能够把地面等一些平面给分割出来,方便后面的物体的点云分割。
2. Cylinder model segmentation(圆柱模型分割):该算法能够把一些圆柱体分割出来,方便后面的物体的点云分割。
3. Euclidean Cluster Extraction(欧几里德聚类提取):通俗来讲就是先从点云中找出一个点p0,然后寻找p0周围最近的n个点,如果这n个点与p0之间的距离小于预先设定的阈值,那么就把这个点取出,依次重复。
4. Region growing segmentation(区域蔓延分割):对于普通点云,其可由法线、曲率估计算法获得其法线和曲率值。
通过法线和曲率来判断某点是否属于该类,向周边蔓延直至完成。
5. pcl::RegionGrowing:使用了一种基于区域增长的方法来分割点云数据,该算法使用一种增长策略,将种子点作为开始点,不断将邻近点添加到同一个区域中。
6. pcl::RegionGrowingRGB:基于RGB颜色信息进行区域生长分割的模块,它基于局部颜色相似性度量邻域内点之间的相似性,并在此基础上将相似的点合并成一个聚类。
7. pcl::SACSegmentation:用于估计点云中符合特定模型的参数以及对应的点集。
它支持对于多种基础的模型进行拟合,如平面、球、圆柱、圆锥等。
SACSegmentation采用随机抽样一致性(RANSAC)算法来实现,可以在噪声点云数据中快速鲁棒地估计模型参数。
以上信息仅供参考,如需了解更多信息,请查阅PCL官方文档或咨询专业人士。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点云地面分割代码
点云地面分割是一个相对复杂的问题。
以下是Python代码实现的一种解法:
```
import open3d as o3d
import numpy as np
import time
# 读入点云数据
pcd = o3d.io.read_point_cloud("point_cloud.pcd")
# 创建平面模型
plane_model, inliers =
pcd.segment_plane(distance_threshold=0.01,
ransac_n=3,
num_iterations=1000) # 对初始点云数据进行地面分割
ground_points = np.asarray(pcd.points)[inliers]
non_ground_points =
np.asarray(pcd.points)[np.logical_not(inliers)]
# 可视化分割结果
pcd_ground = o3d.geometry.PointCloud()
pcd_ground.points = o3d.utility.Vector3dVector(ground_points) pcd_non_ground = o3d.geometry.PointCloud()
pcd_non_ground.points =
o3d.utility.Vector3dVector(non_ground_points)
pcd_ground.paint_uniform_color([1, 0, 0])
pcd_non_ground.paint_uniform_color([0, 1, 0])
o3d.visualization.draw_geometries([pcd_ground,
pcd_non_ground])
```
该代码使用了Open3D库中的建模方法,其中`segment_plane`方法用于从点云中分割出平面模型。
通过平面模型,我们可以将点云数据中的地面和非地面点进行分割。
在上述代码中,`distance_threshold`参数控制了平面模型的精度,`ransac_n`参数为每次随机采样的点的数量,`num_iterations`参数为RANSAC算法的迭代次数。
值得注意的是,该代码实现的方式并不是最优的,对于更大的点云数据,很难直接应用在实际场景中。
如果要使用在真实应用中,需要考虑到算法的速度和准确性。