理解__STM32__GPIO初始化__库函数
关于STM32的USART的使用(一)--- 初始化过程
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA.10
//NVIC中断向量配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
= ENABLE;//IRQ通道使能
NVIC_Init(&NVIC_InitStructure);//根据上面设置的参数初始化NVIC寄存器
//USART初始化设置
USART_ART_BaudRate=bound;//波特率为
9600;USART_ART_WordLength=USART_WordLength_8b;//字长
voiduart_init(u32 bound)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPI
OA,ENABLE);//使能USART1和GPIOA时钟USART_DeInit(USART1);//复位
串口1(各参数置为缺省值)
//USART1_TX(发送数据)PA.9引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
stm32hal库函数说明手册
stm32hal库函数说明手册摘要:I.简介A.什么是STM32HAL 库函数?B.为什么需要STM32HAL 库函数?II.STM32HAL 库函数的使用A.库函数的分类1.通用库函数2.外设库函数B.库函数的使用方法1.函数原型2.函数参数3.函数返回值III.STM32HAL 库函数的应用A.实例:GPIO 操作1.HAL_GPIO_Init() 函数2.HAL_GPIO_WritePin() 函数3.HAL_GPIO_ReadPin() 函数B.实例:中断处理1.HAL_GPIO_EXTI_IRQHandler() 函数IV.总结A.STM32HAL 库函数的作用B.STM32HAL 库函数的发展趋势正文:STM32HAL 库函数说明手册I.简介A.什么是STM32HAL 库函数?STM32HAL 库函数是一系列针对STM32 微控制器的函数,它提供了丰富的功能,包括GPIO 操作、中断处理、定时器控制等,方便开发人员快速、高效地开发STM32 应用。
B.为什么需要STM32HAL 库函数?随着STM32 微控制器的广泛应用,开发者需要一套简洁、易用的API 来操作外设,提高开发效率。
STM32HAL 库函数正是基于此需求而设计的。
II.STM32HAL 库函数的使用A.库函数的分类STM32HAL 库函数主要分为两类:通用库函数和外设库函数。
1.通用库函数通用库函数主要包括内存操作、数学运算、字符串处理等基本功能。
2.外设库函数外设库函数则是针对特定外设的函数,例如GPIO、USART、SPI 等。
B.库函数的使用方法1.函数原型STM32HAL 库函数的原型通常以HAL_开头的宏定义形式存在,例如HAL_GPIO_Init()。
2.函数参数每个函数都有其特定的参数,参数类型包括寄存器、指针、整数等。
使用时需要严格按照函数声明中的参数列表进行传递。
3.函数返回值大部分STM32HAL 库函数的返回值都是一个状态码,表示函数执行的结果。
stm32标准库函数手册
stm32标准库函数手册STM32标准库函数是一种由ST公司推出的一套用于STM32微控制器编程的开发工具,它能够帮助开发者快速地进行芯片的开发、调试和测试。
本文将对STM32标准库函数进行详细的介绍,并提供中文手册,帮助开发者更好地掌握这个工具。
一、STM32标准库函数概述STM32标准库函数是一套由ST公司提供的软件库,包括了一系列用于STM32微控制器的常用功能函数,例如GPIO、USART、SPI、I2C等,这些函数可以用于快速实现各种应用。
同时,ST公司也提供了一些示例代码,可以方便开发者进行学习和参考。
STM32标准库函数可以与各种不同的开发环境集成,例如Keil、IAR、STM32Cube等,方便开发者进行开发。
在使用STM32标准库函数时,可以通过库函数的方式来调用硬件资源,比如设置GPIO口的状态、使用USART进行通信、配置外部中断等。
1. 系统初始化函数:这些函数包括了芯片系统时钟的初始化、中断优先级的设置、时钟输出的配置等,必须在主函数前进行调用。
2. GPIO和外部中断函数:这些函数用于对GPIO口状态的配置和读取,以及对外部中断的控制。
3. USART函数:这些函数用于对串口进行配置和读写操作。
8. DAC函数:这些函数用于对模拟量进行输出。
以下是STM32标准库函数的中文手册,包含了常用函数的介绍和使用方法。
1. 系统初始化函数1.1. RCC配置函数函数原型:void RCC_Configuration(void)函数功能:配置STM32的时钟源和时钟分频系数。
函数说明:在函数内部,首先对PLL时钟源进行配置,然后根据系统时钟的需要选择PLL时钟的分频系数,然后对AHB、APB1、APB2的分频系数进行配置。
最后,开启相应时钟使能位。
函数功能:对STM32的中断向量表进行重定位,并设置各个中断的优先级。
函数说明:中断向量表的地址是由SCB_VTOR寄存器来控制的。
stm32单片机的库函数和关键代码
一、STM32单片机库函数概述STM32单片机是一款由意法半导体公司提供的系列32位微控制器,具有高性能、低功耗等特点,广泛应用于工业控制、汽车电子、智能家居等领域。
在STM32单片机的开发过程中,库函数是开发者最常使用的工具之一,通过库函数可以方便地调用各种功能模块的接口,提高开发效率、降低开发难度。
本文将重点介绍STM32单片机常用的库函数和关键代码。
二、GPIO库函数1. GPIO初始化在STM32单片机中,GPIO是最常用的功能模块之一,可用于控制外部设备,实现输入输出等功能。
在使用GPIO之前,首先需要初始化GPIO的引脚方向、输入输出模式、上拉下拉等配置。
以下是GPIO初始化函数的关键代码:```void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);```其中,GPIOx代表GPIO的端口号,GPIO_InitStruct包含了GPIO的各项配置参数。
2. GPIO读取状态在实际应用中,经常需要读取GPIO引脚的状态,判断外部设备的输入信号。
以下是GPIO读取状态的关键代码:```uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);```该函数可以读取指定GPIO引脚的状态,返回值为0或1,分别代表引脚的低电平或高电平。
3. GPIO输出控制除了读取外部设备的输入信号外,我们还需要控制GPIO引脚输出高低电平,驱动外部设备。
以下是GPIO输出控制的关键代码:```void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); ```通过GPIO_SetBits和GPIO_ResetBits函数,可以分别将指定GPIO 引脚输出高电平或低电平。
stm32标准库函数说明
stm32标准库函数说明
STM32标准库函数是为了方便开发者使用STM32微控制器而提供的一系列函数和库。
这些库函数提供了许多常用的功能,如GPIO操作、定时器操作、串口通信、ADC转换等。
以下是一些常见的STM32标准库函数及其说明:
GPIO 初始化函数:用于配置GPIO(General-Purpose Input/Output)的引脚模式(输入、输出、复用等)和参数(输出类型、输出速度、上拉/下拉等)。
定时器初始化函数:用于配置定时器的模式(计数器模式、PWM模式等)和参数(时钟源、自动重载值等)。
串口初始化函数:用于配置串口通信的参数(波特率、数据位、停止位、奇偶校验等)。
ADC 初始化函数:用于配置ADC(Analog-to-Digital Converter)的参数(转换模式、分辨率等)。
中断初始化函数:用于配置中断的优先级和触发方式。
延时函数:用于产生一定的延时。
睡眠函数:用于使微控制器进入低功耗模式,降低功耗。
串口发送和接收函数:用于串口通信的发送和接收数据。
ADC 读取函数:用于读取ADC转换的结果。
GPIO 操作函数:用于控制GPIO引脚的电平高低或读取引脚的电平状态。
STM32库函数汇总
STM32库函数汇总1.GPIO初始化函数 第1个参数设置GPIO端⼝,第⼆个为结构体设置模式 GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct); 2.读取输⼊电平函数 uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); 读取某个GPIO输⼊的电平,实际操作IDR寄存器,有返回值 uint8_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx); 读取⼀组GPIO输⼊的电平,实际操作IDR寄存,有返回值3.读取输出电平函数 uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); 读取某个GPIO输出的电平,实际操作ODR寄存器,有返回值 uint8_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);读取某组GPIO输出的电平,实际操作ODR寄存器,有返回值4.设置输出电平函数 GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); 设置⾼电平实际操作,BSRR寄存器 GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); 设置低电平,实际操作BRR寄存器5.使能时钟函数 RCC_APB2PeriphColckCmd();6.开启重映射时钟 GPIO_PinRemapConfig(GPIO_Remap_USART1, ENABLE);参数1可以是串⼝,SWJ等很多种类型7.设置中断优先级分组 void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup); 在misc.c⽂件中8.设置抢占优先级和响应优先级 void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct);需要设置通道,抢占优先级,响应优先级,使能通道等9.串⼝相关函数 void USART_Init();串⼝初始化:波特率,数据字长,奇偶校验,硬件流控以收发使能 void USART_Cmd(形参1,形参2);使能串⼝,形参1是串⼝位,形参2是ENABLE; void USART_ITConfig(形参1,形参2,形参3);使能中断,形参1是串⼝位,形参2是要开启中断的类型,形参3是ENABLE; void USART_SendData(形参1,形参2);发送数据到串⼝,DR,形参1是串⼝位,形参2是要发送是数据 uint16_t USART_ReceiveData(形参1);接收数据,从DR读取接收到的数据,形参1值是串⼝位 FlagStatus USART_GetFlagStatus();获取状态标志位 void USART_ClearFlag();清除状态标志位 ITStatus USART_GetITStatus(形参1,形参2)获取中断标志位;参数1值是串⼝位,参数2是要获取的状态 void USART_ClearITPendingBit();清除中断状态标志位 USART1_IRQHandler();USART中断函数,产⽣中断后进⼊,函数在核⼼⽂件中;10.外部中断函数 GPIO_EXTILineConfig(参数1,参数2);设置中断线的映射关系,参数1与参数2为要中断的IO EXTI_Init();初始化外部中断线,触发⽅式, EXTI_GetITStatus();判断中断状态是否发⽣ EXTI_ClearlTPendingBit();清除中断线上的标志位11.独⽴看门狗实验 IWDG_WriteAccessCmd(uint16_t IWDG_WriteAccess);形参后⾯跟ENABLE,取消写保护 IWDG_SetPrescaler(uint8_t IWDG_Prescaler);设置预分频系数 IWDG_SetReload(uint16_t Reload);设置重装载值 IWDG_Enable();使能看门狗 IWDG_ReloadCounter();喂狗12.窗⼝看门狗 RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG, ENABLE);使能窗⼝看门狗 WWDG_SetPrescaler();设置预分频系数 WWDG_SetWindowValue();设置上窗⼝值 WWDG_EnableIT(); 开启窗⼝看门狗中断 NVIC_Init();中断初始化 WWDG_Enable();使能看门狗,设置初始计数器值 WWDG_SetCounter();喂狗 设置计数器值 WWDG_IRQHandler();编写中断服务函数13.通⽤定时器 TIM_TimeBaseInit(TIM3, &TIM_Timesture); 初始化通⽤定时器 TIM_GetITStatus(TIM3,TIM_IT_Update); 获取定时器标志位发⽣中断后标志位置1 SET TIM_ClearITPendingBit(TIM3,TIM_IT_Update);清除定时器标志位 TIM_ITConfig(TIM3, TIM_IT_Update,ENABLE);开启定时器中断 TIM_Cmd(TIM3, ENABLE); 使能通⽤定时器。
STM32-GPIO及EXTI初始化详解
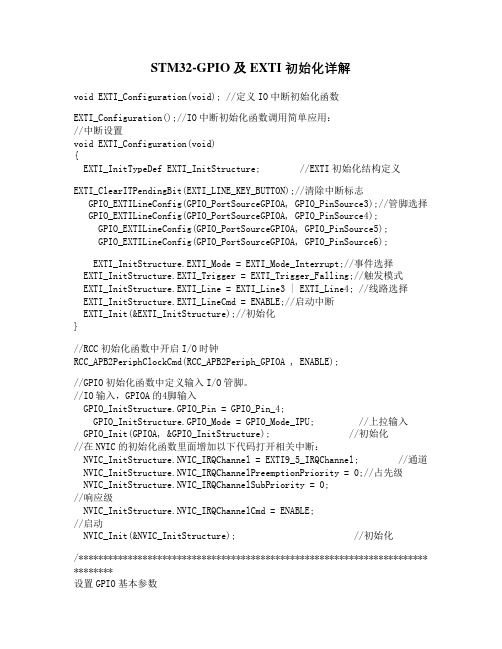
STM32-GPIO及EXTI初始化详解void EXTI_Configuration(void); //定义IO中断初始化函数EXTI_Configuration();//IO中断初始化函数调用简单应用://中断设置void EXTI_Configuration(void){EXTI_InitTypeDef EXTI_InitStructure; //EXTI初始化结构定义EXTI_ClearITPendingBit(EXTI_LINE_KEY_BUTTON);//清除中断标志GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource3);//管脚选择GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource4);GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource5);GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource6);EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//事件选择EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//触发模式EXTI_InitStructure.EXTI_Line = EXTI_Line3 | EXTI_Line4; //线路选择EXTI_InitStructure.EXTI_LineCmd = ENABLE;//启动中断EXTI_Init(&EXTI_InitStructure);//初始化}//RCC初始化函数中开启I/O时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);//GPIO初始化函数中定义输入I/O管脚。
stm32hal库函数说明手册

stm32hal库函数说明手册摘要:一、STM32HAL 库概述二、STM32HAL 库常用函数说明1.GPIO 操作相关函数2.备份寄存器相关函数3.CAN 控制器相关函数4.局域网模块相关函数5.DMA 直接内存存取控制器相关函数6.外部中断事件控制器相关函数7.闪存存储器相关函数8.通用输入输出相关函数9.内部集成电路相关函数10.独立看门狗相关函数11.嵌套中断向量列表控制器相关函数12.电源/功耗控制相关函数13.复位与时钟控制器相关函数正文:一、STM32HAL 库概述STM32HAL 库是基于STM32 微控制器的硬件抽象层(HAL)库,它为开发者提供了一系列易于使用的函数,以便在STM32 上实现各种外设的操作。
STM32HAL 库大大简化了开发过程,降低了开发难度,使得开发者能够更加高效地开发出功能丰富的应用程序。
本手册主要对STM32HAL 库中的常用函数进行说明,帮助开发者快速掌握库函数的使用方法。
二、STM32HAL 库常用函数说明1.GPIO 操作相关函数GPIO(通用输入输出)是STM32 微控制器中最常用的外设之一。
以下是一些常用的GPIO 操作函数:- halgpiodeinit:GPIO 初始化函数,用于配置GPIO 的引脚模式、输出类型、速度等。
- halgpiowrite:用于设置或清除指定GPIO 引脚的状态。
- halgpioread:用于读取指定GPIO 引脚的状态。
- halgpioexticallback:中断回调函数,用于处理GPIO 外部中断事件。
2.备份寄存器相关函数备份寄存器用于在系统复位或断电时保存一些关键数据。
以下是一些常用的备份寄存器操作函数:- hal_bkp_init:备份寄存器初始化函数。
- hal_bkp_write:向备份寄存器写入数据。
- hal_bkp_read:从备份寄存器读取数据。
3.CAN 控制器相关函数CAN(控制器局域网)是一种常用于车辆和工业控制领域的通信协议。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
使用库函数进行STM32的产品开发无疑可以节省大量时间。
下面将介绍GPIO 初始化所用到的库函数
以最常用的GPIO设备的初始化函数为例,如下程序段一:
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure)
这是一个在STM32的程序开发中经常使用到的GPIO初始化程序段,其功能是将GPIOA.4口初始化为推挽输出状态,并最大翻转速率为50MHz。
下面逐一分解:l
首先是1,该语句显然定义了一个GPIO_InitTypeDef类型的变量,名为
GPIO_InitStructure,则找出GPIO_InitTypeDef的原型位于
“stm32f10x_gpio.h”文件,原型如下:
typedef struct
{
u16GPIO_Pin;
GPIOSpeed_TypeDef GPIO_Speed;
GPIOMode_TypeDef GPIO_Mode;
}GPIO_InitTypeDef;
由此可知GPIO_InitTypeDef是一个结构体类型同义字,其功能是定义一个结构体,该结构体有三个成员分别是u16类型的GPIO_Pin、
GPIOSpeed_TypeDef类型的GPIO_Speed和GPIOMode_TypeDef类型的
GPIO_Mode。
继续探查GPIOSpeed_TypeDef和GPIOMode_TypeDef类型,在“stm32f10x_gpio.h”文件中找到对GPIOSpeed_TypeDef的定义:
typedef enum
{
GPIO_Speed_10MHz=1,
GPIO_Speed_2MHz,
GPIO_Speed_50MHz
}GPIOSpeed_TypeDef;
则可知GPIOSpeed_TypeDef枚举类型同一只,其功能是定义一个枚举类型变量,该变量可表示GPIO_Speed_10MHz、GPIO_Speed_2MHz和
GPIO_Speed_50MHz三个含义(其中GPIO_Speed_10MHz已经定义为1,读者必须知道GPIO_Speed_2MHz则依次被编译器赋予2,而GPIO_Speed_50MHz 为3)。
同样也在“stm32f10x_gpio.h”文件中找到对GPIOMode_TypeDef的定义:
typedef enum
{
GPIO_Mode_AIN=0x0,
GPIO_Mode_IN_FLOATING=0x04,
GPIO_Mode_IPD=0x28,
GPIO_Mode_IPU=0x48,
GPIO_Mode_Out_OD=0x14,
GPIO_Mode_Out_PP=0x10,
GPIO_Mode_AF_OD=0x1C,
GPIO_Mode_AF_PP=0x18
}GPIOMode_TypeDef;
这同样是一个枚举类型同义字,其成员有GPIO_Mode_AIN、GPIO_Mode_AF_OD 等(也可以轻易判断出这表示GPIO设备的工作模式)。
至此对程序段一的○1解析可以做一个总结:该行定义一个结构体类型的变量GPIO_InitStructure,并且该结构体有3个成员,分别为GPIO_Pin、GPIO_Speed和GPIO_Mode,并且GPIO_Pin表示GPIO设备引脚GPIO_Speed 表示GPIO设备速率和GPIO_Mode表示GPIO设备工作模式。
接下来是2,此句是一个赋值语句,把GPIO_Pin_4赋给GPIO_InitStructure 结构体中的成员GPIO_Pin,可以在“stm32f10x_gpio.h”文件中找到对GPIO_Pin_4做的宏定义:
#define GPIO_Pin_4((u16)0x0010)
因此○2的本质是将16位数0x0010赋给GPIO_InitStructure结构体中的成员GPIO_Pin。
3语句和2相似将GPIO_Speed_50MHz赋给GPIO_InitStructure结构体中的成员GPIO_Speed,但注意到此处GPIO_Speed_50MHz只是一个枚举变量,并非具体的某个值。
4语句亦和2语句类似,把GPIO_Mode_Out_PP赋给GPIO_InitStructure结构体中的成员GPIO_Mode,从上文可知GPIO_Mode_Out_PP的值为0x10。
5是一个函数调用,即调用GPIO_Init函数,并提供给该函数2个参数,分别为GPIOA和&GPIO_InitStructure,其中&GPIO_InitStructure表示结构体变量GPIO_InitStructure的地址,而GPIOA则在“stm32f10x_map.h”文件中找到定义:
#ifdef_GPIOA
#define GPIOA((GPIO_TypeDef*)GPIOA_BASE)
#endif
此三行代码是一个预编译结构,首先判断是否定义了宏_GPIOA。
可以在“stm32f10x_conf.h”中发现对_GPIOA的定义为:
#define_GPIOA
这表示编译器会将代码中出现的GPIOA全部替换为((GPIO_TypeDef*) GPIOA_BASE)。
从该句的C语言语法可以判断出((GPIO_TypeDef*)
GPIOA_BASE)的功能为将GPIOA_BASE强制类型转换为指向GPIO_TypeDef类型的结构体变量。
如此则需要找出GPIOA_BASE的含义,依次在
“stm32f10x_map.h”文件中找到:
#define GPIOA_BASE(APB2PERIPH_BASE+0x0800)
和:
#define APB2PERIPH_BASE(PERIPH_BASE+0x10000)
还有:
#define PERIPH_BASE((u32)0x40000000)
明显GPIOA_BASE表示一个地址,通过将以上3个宏展开可以得到:
GPIOA_BASE=0x40000000+0x10000+0x0800
此处的关键便在于0x40000000、0x10000和0x0800这三个数值的来历。
读者应该通过宏名猜到了,这就是STM32微控制器的GPIOA的设备地址。
通过查阅STM32微控制器开发手册可以得知,STM32的外设起始基地址为
0x40000000,而APB2总线设备起始地址相对于外设基地址的偏移量为
0x10000,GPIOA设备相对于APB2总线设备起始地址偏移量为0x0800。
对○5句代码进行一个总结:调用GPIO_Init函数,并将STM32微控制器的GPIOA设备地址和所定义的结构体变量GPIO_InitStructure的地址传入。
更多的库函数可以去stm32f10x_gpio.h头文件去查看。