CarSim与Simulink联合仿真
CarSim与Simulink联合仿真
CarSim与Simulink联合仿真1 软件介绍在MATLAB中,Simulink是用来建模、仿真和分析动态多维系统的交互工具。
可以使用Simulink提供的标准模型库或者自行创建模型库,描述、模拟、评价和精化系统行为,同时,Simulink和MATLAB之间的联系十分便捷,可以使用一个灵活的操作系和应用广泛的分析和设计工具。
最后,除了可以使用Simulink建模和仿真之外,还可以通过其他软件联合来完成更多的分析任务,如CarSim、ADAMS、AMEsim等许多软件。
CarSim是专门针对车辆动力学的仿真软件,CarSim模型在计算机上运行的速度比实时快3-6倍,可以仿真车辆对驾驶员,路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性,同时被广泛地应用于现代汽车控制系统的开发。
CarSim可以方便灵活的定义试验环境和试验过程,详细的定义整车各系统的特性参数和特性文件。
CarSim软件的主要功能如下:●适用于以下车型的建模仿真:轿车、轻型货车、轻型多用途运输车及SUV;●可分析车辆的动力性、燃油经济性、操纵稳定性、制动性及平顺性;●可以通过软件如MA TLAB,Excel等进行绘图和分析;●可以图形曲线及三维动画形式观察仿真的结果;●包括图形化数据管理界面,车辆模型求解器,绘图工具,三维动画回放工具,功率谱分析模块;●程序稳定可靠;●软件可以实时的速度运行,支持硬件在环,CarSim软件可以扩展为CarSim RT,CarSim RT 是实时车辆模型,提供与一些硬件实时系统的接口,可联合进行HIL仿真;●先进的事件处理技术,实现复杂工况的仿真;●友好的图形用户界面,可快速方便实现建模仿真;●提供多种车型的建模数据库;●可实现用户自定义变量的仿真结果输出;●可实现与simulink的相互调用;●多种仿真工况的批运行功能;2 CarSim与Simulink联合仿真2.1 Simulink接口1) 变量由Simulink导入CarSim(导入变量)可由Simulink导入到CarSim中的变量可达160多个,主要分为以下几部分:⏹控制输入⏹轮胎/路面输入⏹轮胎的力和力矩⏹弹簧及阻尼力⏹转向系统的角度⏹传动系的力矩⏹制动力矩及制动压力⏹风的输入⏹任意的力和力矩图2.1 CarSim导入变量分类我们可以在Simulink中定义变量,也可以在其他软件中定义并导入Simulink模型中,导入的变量将叠加到CarSim内部相应的变量中。
CarSim、Simulink联合仿真
CarSim与Simulink联合仿真1 软件介绍在MATLAB中,Simulink是用来建模、仿真和分析动态多维系统的交互工具。
可以使用Simulink提供的标准模型库或者自行创建模型库,描述、模拟、评价和精化系统行为,同时,Simulink和MATLAB之间的联系十分便捷,可以使用一个灵活的操作系和应用广泛的分析和设计工具。
最后,除了可以使用Simulink建模和仿真之外,还可以通过其他软件联合来完成更多的分析任务,如CarSim、ADAMS、AMEsim等许多软件。
CarSim是专门针对车辆动力学的仿真软件,CarSim模型在计算机上运行的速度比实时快3-6倍,可以仿真车辆对驾驶员,路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性,同时被广泛地应用于现代汽车控制系统的开发。
CarSim可以方便灵活的定义试验环境和试验过程,详细的定义整车各系统的特性参数和特性文件。
CarSim软件的主要功能如下:●适用于以下车型的建模仿真:轿车、轻型货车、轻型多用途运输车及SUV;●可分析车辆的动力性、燃油经济性、操纵稳定性、制动性及平顺性;●可以通过软件如MATLAB,Excel等进行绘图和分析;●可以图形曲线及三维动画形式观察仿真的结果;●包括图形化数据管理界面,车辆模型求解器,绘图工具,三维动画回放工具,功率谱分析模块;●程序稳定可靠;●软件可以实时的速度运行,支持硬件在环,CarSim软件可以扩展为CarSim RT,CarSim RT 是实时车辆模型,提供与一些硬件实时系统的接口,可联合进行HIL仿真;●先进的事件处理技术,实现复杂工况的仿真;●友好的图形用户界面,可快速方便实现建模仿真;●提供多种车型的建模数据库;●可实现用户自定义变量的仿真结果输出;●可实现与simulink的相互调用;●多种仿真工况的批运行功能;2 CarSim与Simulink联合仿真2.1 Simulink接口1) 变量由Simulink导入CarSim(导入变量)可由Simulink导入到CarSim中的变量可达160多个,主要分为以下几部分:⏹控制输入⏹轮胎/路面输入⏹轮胎的力和力矩⏹弹簧及阻尼力⏹转向系统的角度⏹传动系的力矩⏹制动力矩及制动压力⏹风的输入任意的力和力矩图2.1 CarSim导入变量分类我们可以在Simulink中定义变量,也可以在其他软件中定义并导入Simulink模型中,导入的变量将叠加到CarSim内部相应的变量中。
CarSim与Simulink联合仿真
CarSim与Simulink联合仿真1 软件介绍在MATLAB中,Simulink是用来建模、仿真和分析动态多维系统的交互工具。
可以使用Simulink提供的标准模型库或者自行创建模型库,描述、模拟、评价和精化系统行为,同时,Simulink和MATLAB之间的联系十分便捷,可以使用一个灵活的操作系和应用广泛的分析和设计工具。
最后,除了可以使用Simulink建模和仿真之外,还可以通过其他软件联合来完成更多的分析任务,如CarSim、ADAMS、AMEsim等许多软件。
CarSim是专门针对车辆动力学的仿真软件,CarSim模型在计算机上运行的速度比实时快3-6倍,可以仿真车辆对驾驶员,路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性,同时被广泛地应用于现代汽车控制系统的开发。
CarSim可以方便灵活的定义试验环境和试验过程,详细的定义整车各系统的特性参数和特性文件。
CarSim软件的主要功能如下:●适用于以下车型的建模仿真:轿车、轻型货车、轻型多用途运输车及SUV;●可分析车辆的动力性、燃油经济性、操纵稳定性、制动性及平顺性;●可以通过软件如MATLAB,Excel等进行绘图和分析;●可以图形曲线及三维动画形式观察仿真的结果;●包括图形化数据管理界面,车辆模型求解器,绘图工具,三维动画回放工具,功率谱分析模块;●程序稳定可靠;●软件可以实时的速度运行,支持硬件在环,CarSim软件可以扩展为CarSim RT,CarSim RT 是实时车辆模型,提供与一些硬件实时系统的接口,可联合进行HIL仿真;●先进的事件处理技术,实现复杂工况的仿真;●友好的图形用户界面,可快速方便实现建模仿真;●提供多种车型的建模数据库;●可实现用户自定义变量的仿真结果输出;●可实现与simulink的相互调用;●多种仿真工况的批运行功能;2 CarSim与Simulink联合仿真2.1 Simulink接口1) 变量由Simulink导入CarSim(导入变量)可由Simulink导入到CarSim中的变量可达160多个,主要分为以下几部分:⏹控制输入⏹轮胎/路面输入⏹轮胎的力和力矩⏹弹簧及阻尼力⏹转向系统的角度⏹传动系的力矩⏹制动力矩及制动压力⏹风的输入⏹任意的力和力矩图2.1 CarSim导入变量分类我们可以在Simulink中定义变量,也可以在其他软件中定义并导入Simulink模型中,导入的变量将叠加到 CarSim内部相应的变量中。
基于CarsimSimulink联合仿真的分布式驱动电动汽车建模
基于CarsimSimulink联合仿真的分布式驱动电动汽车建模一、本文概述随着电动汽车技术的快速发展,分布式驱动电动汽车(Distributed Drive Electric Vehicles, DDEV)因其高效能源利用、优越操控性能以及灵活的驱动方式,正逐渐成为新能源汽车领域的研究热点。
为了更深入地理解和研究DDEV的动态特性与控制策略,建立精确的车辆模型是关键。
本文旨在探讨基于Carsim与Simulink 联合仿真的分布式驱动电动汽车建模方法,以期在车辆动力学建模、控制策略优化和系统集成等方面提供有效的技术支撑。
本文首先介绍分布式驱动电动汽车的基本结构和特点,阐述其相较于传统车辆的优势。
随后,详细介绍Carsim和Simulink两款软件在车辆建模和仿真分析方面的功能和特点,以及它们联合仿真的优势。
接着,将重点介绍如何利用Carsim建立DDEV的车辆动力学模型,包括车辆动力学方程、轮胎模型、驱动系统模型等。
将探讨如何利用Simulink构建DDEV的控制策略模型,包括驱动控制、制动控制、稳定性控制等。
在建立了DDEV的车辆动力学模型和控制策略模型后,本文将详细阐述如何将这两个模型进行联合仿真,并分析仿真结果。
通过对比分析不同控制策略下的车辆性能表现,验证所建模型的准确性和有效性。
本文还将讨论分布式驱动电动汽车建模面临的挑战和未来的研究方向,为相关领域的研究者提供参考和借鉴。
二、Carsim软件介绍Carsim是一款由密歇根大学开发的高级车辆动力学仿真软件,广泛应用于车辆控制、车辆动力学、主动和被动安全、电动和混合动力车辆以及先进的驾驶员辅助系统等领域的研究和开发。
该软件以模块化的方式集成了车辆各个子系统的动力学模型,包括发动机、传动系统、制动系统、转向系统、悬挂系统、轮胎以及车身等。
Carsim的核心优势在于其强大的物理引擎和精确的仿真能力。
通过精确的算法和详尽的车辆参数数据库,Carsim能够模拟出车辆在各种道路条件和驾驶操作下的动态行为,如加速、制动、转向、侧滑等。
Carsim和Simulink联合仿真-精品文档

清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.7 整车参数设置
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.8 新建仿真工况
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.9 驾驶员操纵条件设置
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.10 仿真时间设置
3 实例操作 奇瑞A3车60km/h的横向瞬态响应 仿真操作为例: 车速:60km/h 转向盘:幅值为53°、周期4s的 正弦角信号输入。
清华大学—恒隆汽车转向系统研究所
3 实例操作
打开Carsim,弹出下面对话框:
图3.1 选择Carsim数据库
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.2 Carsim许可设置对话框
3 实例操作
图3.22 Carsim导出变量的主界面
清华大学—恒隆汽车转向系统研究所3 实例ຫໍສະໝຸດ 作图3.23 选择导出变量文件
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.24 选择Carsim导出变量
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.25 发送到Simulink
1.2 Carsim建模
图1.6 Carsim整车模型示意图
清华大学—恒隆汽车转向系统研究所
1.2 Carsim建模
车辆特性
主界面
3D动画
测试环境
仿真求解
曲线绘制
图1.7 Carsim软件的主界面及构成
清华大学—恒隆汽车转向系统研究所
1.2 Carsim建模
图1.8 Carsim软件的车辆特性设置
基于CarSim和Simulink的EPS系统联合仿真分析_张玉洁
器
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
20
一 般 规 律 , 无 EPS 系 统 时 的 转 向 盘
最大转矩值为 20N·m,更加符合实际 15
情 况 ;开 启 EPS 后 ,能 有 效 的 提 高 转
10
向轻便性,转矩最大值下降为 8N·m,
14 汽车维修 2015.7
汽车诊所
AUTOMOBILE MAINTENANCE
6DCT250 变 速 器 是 一 款 干 式 双
该款变速器的装配工艺较复杂,
6DCT250
离合自动变速器,又称 DPS6,具有 6
稍不注意可能导致离合器总成报
个前进挡和 1 个倒挡, 最大承受扭 矩 为 250N·m,重 量 约 73kg,主 要 应 用于福特新福克斯、 新嘉年华以及 翼博等车型上。 该变速器由福特与 德国格特拉克合作开发, 变速器核 心零部件之一的双离合器模块来自 供 应 商 德 国 舍 弗 勒 旗 下 的 Luk 公 司。
而且比较稳定,波动较小。 5
五、结论
转 向 盘 转 矩 (N·m)
0
文 章 主 要 在 Simulink 环 境 中 建
立 了 EPS 系 统 模 型 并 设 计 了 控 制 策
-5 略,然后利用动力学仿真软件 CarSim
-10
-15
-20 -500
-400 -300 -200 -100 0 100 转 向 盘 转 角 (°)
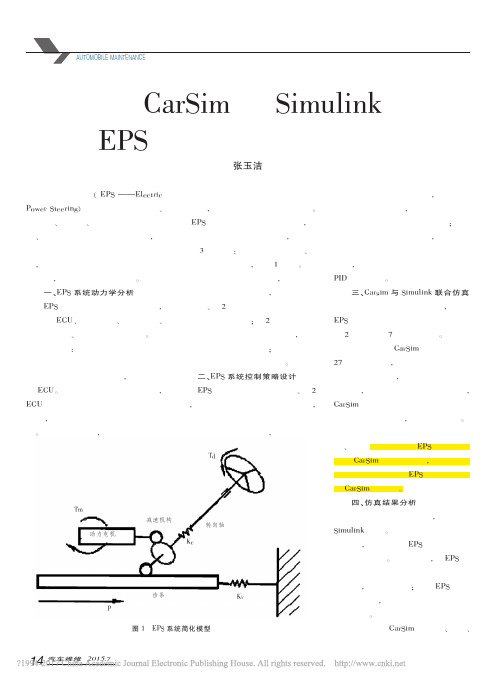
二、EPS 系统控制策略设计 EPS 系 统 控 制 策 略 分 为 上 、下 2 层, 上层控制是对目标电流的控制, 主要是根据汽车转向工况的状态参 数进行工作模式的选择,且进一步确
基于Carsim与Simulink的自动变道联合仿真
10.16638/ki.1671-7988.2021.08.007基于Carsim与Simulink的自动变道联合仿真许阁(东风汽车公司技术中心,湖北武汉430058)摘要:文章通过Carsim搭建汽车模型并配置道路障碍物等环境信息,并通过模拟传感器输出车道线、障碍物和本车运动状态信息,并通过接口配置发送到Simulink,再通过在Simulink中搭建自动变道的路径规划和跟踪控制算法输出方向盘转角信号给Carsim,实现对汽车自动变道的闭环仿真。
关键词:多项式拟合;前馈反馈控制;控制点预瞄中图分类号:U463.6 文献标识码:B 文章编号:1671-7988(2021)08-18-03Automatic Lane Change Co-simulation Based on Carsim and SimulinkXu Ge(Dongfeng Motor Company Technology Center, Hubei Wuhan 430058)Abstract: This paper through Carsim to build car models and configure environmental information such as road obstruc -tions, and through the analog sensor outputs lane lines, obstacles and vehicle motion state information, which will be sent to Simulink via interface configuration. Then the path planning and tracking control algorithm of automatic lane change was built in Simulink to output steering wheel angle signal to Carsim, so that the closed-loop simulation of auto lane change is realized.Keywords: Polynomial fitting; Feedforward feedback control; Control point previewCLC NO.: U463.6 Document Code: B Article ID: 1671-7988(2021)08-18-031 前言对于自动变道规划算法而言,其作用是接收来自决策模块的决策信号,处理后生成一条变道规划轨迹并由控制模块按此轨迹控制本车进行自动变道。
基于CarSim与Simulink联合仿真的轮式拖拉机舒适性分析

基于CarSim与Simulink联合仿真的轮式拖拉机舒适性分析赵斌;董浩;张建;黄波【摘要】根据滤波白噪声路面数学模型在Simulink中建立了D级路面仿真模型,利用CarSim-Simulink联合仿真方法建立了东风404轮式拖拉机的车辆动力学模型,结合建立的模型进行了在车速分别为10、30、50 km/h时的舒适性仿真分析,结果表明整车的舒适性有待提高.探索了在Simulink中建立路面模型的方法及利用CarSim-Simulink研究整车舒适性分析的途径,为进一步进行整车动力学分析提供了依据.【期刊名称】《成都大学学报(自然科学版)》【年(卷),期】2018(037)002【总页数】5页(P191-195)【关键词】轮式拖拉机;舒适性;仿真【作者】赵斌;董浩;张建;黄波【作者单位】成都大学机械工程学院,四川成都610106;成都大学机械工程学院,四川成都610106;成都大学机械工程学院,四川成都610106;成都大学机械工程学院,四川成都610106【正文语种】中文【中图分类】S219.1;TP391.90 引言车辆整车是一个非常复杂的动力学系统,很难建立一个非常精确的数学模型对其进行分析,而必须根据具体的研究问题进行相应的简化.针对车辆行驶时由路面不平以及车辆内部构件的运动激发的整车振动问题,科研人员对其进行了研究,例如,赵旗等[1]应用滤波白噪声法建立了车辆平顺性模型,卢胜文等[2]建立了多自由度悬架的整车模型来探讨非线性振动问题.在此基础上,本研究以滤波白噪声路面模型的D级路面为路面输入,对东风404型轮式拖拉机建立8自由度整车模型,并分析了其整车舒适性.1 路面模型建立通常,随机路面可以使用白噪声积分器或一阶滤波器产生,其时域模型如下[3]:(1)式中,q(t)是路面位移;Gq(n0)是路面不平度系数;u是车辆行驶速度,单位是m/s;ω(t)是白噪声;f0是滤波器的下限截止频率,取值f0=0.0628 Hz;n0是参考空间频率,取0.1.对于D级路面,Gq(n0)=1 024×10-6.本研究利用Simulink分析软件建立的路面模型如图1所示.图1 利用Simulink建立的路面模型2 轮式拖拉机模型及其运动微分方程2.1 轮式拖拉机模型本研究针对东风404型轮式拖拉机在随机输入下的整车振动特性,包括座椅、车身垂直、车身仰俯、车身侧倾以及车桥建立的8自由度模型结构如图2所示.图2 轮式拖拉机8自由度整车模型图2中各符号的含义表示如下:mc为驾驶员和座椅质量;zc为驾驶员座椅垂向位移;mb为车体质量;zb为车体质心处的垂向位移;Iθ为车体俯仰转动惯量;θ为车体俯仰角位移;Iφ为车体侧倾转动惯量;φ为车体侧倾角位移;mti为轮胎质量(i=1,2,3,4);zti为轮胎垂向位移;qi为车轮处的路面不平度垂向激励;ksi 为悬架刚度;csi为悬架阻尼;kti为轮胎刚度;cti为轮胎阻尼;kc为座椅弹簧刚度;cc为座椅弹簧阻尼;df、dr为前轴轮距和后轴轮距的一半;l1、l2为车体质心距前轴和后轴的距离;lx、ly为驾驶员座椅到车体质心的纵向和横向水平距离.2.2 运动微分方程根据拉格朗日方程,8自由度整车模型运动微分方程为:1)驾驶员座椅的垂向运动微分方程为,(2)2)车体垂向运动微分方程为,mb(3)3)车体俯仰运动微分方程为,Iθlxkc(zb-lxθ+lyφ-zc)=0(4)4)车体侧倾运动微分方程为,Iφ(5)5)左前轮垂向运动微分方程为,(6)6)左后轮垂向运动微分方程为,(7)7)右前轮垂向运动微分方程为,(8)8)右后轮垂向运动微分方程为,(9)方程(2)~(9)改写为矩阵形式为,[M](10)式中,{Q}=[q1 q2 q3 q4]T{Z}=[zc zb θφzt1 zt2 zt3 zt4]T {M}=diag[mc mb IθIφ mt1 mt2 mt3 mt4]2.3 系统响应对式(10)两边进行Fourier变换,得,-ω2[M]{Z(ω)}+jω[C]{Z(ω)}+[K]{Z(ω)}=[Kt]{Q(ω)}+jω[Ct]{Q(ω)}(11)则车辆振动位移对路面输入的传递矩阵为,(12)式中,Hz-q(ω)是一个以振动圆频率ω为自变量的8行4列复数矩阵.根据系统的特性,振动位移响应的功率谱矩阵为,(13)式中,为传递矩阵的共轨矩阵;[Hz-q(ω)]T为传递矩阵的转置矩阵.[Gz]是一个8行8列矩阵,其对角线元素[Gzizi]即为振动系统第i个自由度位移响应的自功率谱密度,根据ω=2πf,可将式(12)中的圆频率写成时间频率的形式,于是得到振动系统第i个自由度位移响应的均方根值为,(14)设振动速度、加速度响应的传递矩阵分别为则由Fourier变换的性质可知,(15)(16)由此,可得加速度响应的功率谱矩阵为,=(17)同理,矩阵的对角线元素为振动系统第i个自由度加速度响应的自功率谱密度,于是得到振动系统第i个自由度加速度响应均方根值为,(18)通常,在计算汽车舒适性评价指标时,需要一个频率加权函数W(f),于是,(19)式中,3 CarSim-Simulink联合仿真模型建立3.1 Simulink建立的路面模型导入CarSimCarSim是专门针对车辆动力学的仿真软件,对东风404型轮式拖拉机进行舒适性仿真分析,其在CarSim中的仿真图形用户界面如图3所示.图3 轮式拖拉机仿真图形用户界面在此基础上,利用CarSim-Simulink联合仿真,可将Simulink建立的路面模型直接加载在车辆车轮上.前后车轮路面谱的相关性体现在前后车轮间的时间差t,其时间差可由拖拉机轴距除以速度得到[5].为了突出拖拉机运行过程中路面的恶劣情况,本研究取对角车轮为相同路面谱,即左前车轮与右后车轮路面谱相同.当车速分别为10、30、50 km/h时路面输入如图4~图6所示.图4 车速为10 km/h时路面不平度图5 车速为30 km/h时路面不平度图6 车速为50 km/h时路面不平度3.2 联合仿真模型的建立东风404型轮式拖拉机CarSim-Simulink联合仿真模型如图7所示.图7 CarSim-Simulink联合仿真模型4 仿真结果与分析4.1 仿真结果在CarSim输出列表中,本研究用拖拉机座椅处的加速度进行舒适性分析.当车速分别为10、30、50 km/h时,座椅处的纵向、侧向、垂向加速度仿真结果如图8~图10所示.图8 纵向加速度图9 侧向加速度图10 垂向加速度4.2 结果分析根据文献[6],车辆的总加权加速度均方根值为,(20)式中,aωx、aωy和aωz分别为纵向、横向、垂向的加权加速度均方根值,m/s2. 本研究采用加权振级Laω对车辆的舒适性进行评价,其与加权加速度均方根值aω的换算关系为,Laω=20lg(aω/a0)(21)式中,a0=10-6 m/s2,为参考加速度均方根值.表1给出了加权振级Laω和加权加速度均方根值aω与人的主观感觉之间的关系[8].表2给出了仿真数据的计算结果.表1 Laω和aω与人的主观感觉之间的关系aω/(m/s2)Laω/dB人的主观感觉<0.315110没有不舒适0.315~0.63110~116有一些不舒适0.5~1.0114~120相当不舒适0.8~1.6118~124不舒适1.25~2.5122~128很不舒适>2.0126极不舒适表2 计算结果车速/(km/h)aωx/(m/s2)aωy/(m/s2)aωz/(m/s2)aω/(m/s2)Laω/dB人的主观感觉100.38840.00280.30770.6248115.9143相当不舒适300.00390.76391.67511.9874125.9665很不舒适500.00260.56631.63311.8154125.1794很不舒适由表2数据可知,东风404型轮式拖拉机在D级路面下,车速为10 km/h时人的主观感觉属于相当不舒适,车速为30与50 km/h时人的主观感受均属于很不舒服这个级别,且50 km/h时平顺性结果稍好,这可能和拖拉机较大的悬架行程有关.对于低速,速度越小,车辆行驶越慢,悬架行程较大的车辆弹簧减震器有充足的时间压缩回弹,导致车辆在纵向、侧向及垂向的加速度均较大.当速度提高,弹簧减震器压缩回弹时间缩短,路面振动来不及全部传递至车体,所以导致拖拉机在速度大的情况下平顺性反而好,但是都属于很不舒服的级别.仿真结果表明,东风404型轮式拖拉机的整车舒适性有待改善.参考文献:【相关文献】[1]赵旗,王维,李杰,等.基于滤波白噪声的汽车平顺性时域建模和仿真[J].科学技术与工程,2016,16(27):283-287.[2]卢胜文,贾启芬,于雯,等.汽车多自由度悬架的非线性振动特性[J].应用力学学报,2005,22(3):461-465.[3]王欢.汽车悬架系统非线性动力学行为分析与控制[D].镇江:江苏大学,2006.[4]潘公宇,陈龙,江浩斌,等.汽车系统动力学基础及其控制技术[M].北京:清华大学出版社,2017.[5]喻凡.汽车系统动力学[M].北京:机械工业出版社,2017.[6]陈无畏,王其东,肖寒松,等.汽车系统动力学与集成控制[M].北京:科学出版社, 2014.[7]周长城.汽车平顺性与悬架系统设计[M].北京:机械工业出版社,2011.[8]靳晓雄,张立军,江浩,等.汽车振动分析[M].上海:同济大学出版社,2002.。