计算机图形学孙家广第三版第3章3
计算机图形学基础教程附录(第二版)(孙家广 胡事民编著)
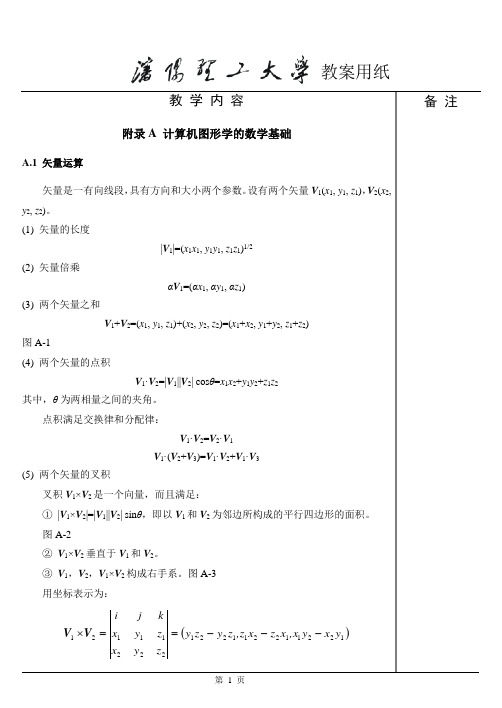
(4)两个矢量的点积
V1·V2=|V1||V2|cosθ=x1x2+y1y2+z1z2
其中,θ为两相量之间的夹角。
点积满足交换律和分配律:
V1·V2=V2·V1
V1·(V2+V3)=V1·V2+V1·V3
(5)两个矢量的叉积
叉积V1×V2是一个向量,而且满足:
①|V1×V2|=|V1||V2|sinθ,即以V1和V2为邻边所构成的平行四边形的面积。
齐次坐标的优点:
①它提供了用矩阵运算把二维、三维甚至高维空间中的一个点集,从一个坐标系变换到另一个坐标系的有效方法。
②它可以表示无穷远的点。n+1维的齐次坐标中如果h=0,实际上就表示了n维空间的一个无穷远点。对于齐次坐标[a,b,h],保持a,b不变,h→0的过程就表示了在二维坐标系中的一个点,沿直线ax+by=0逐渐走向无穷远处的过程。
即:
用齐次坐标表示为:
其中h=(zprp-z)/dp。
由比例关系,两者的变换公式为:
可以简单地将两者的关系表示为:
其中:
用矩阵表示为:
B.2二维图形的几何变换
正如我们在附录A中提到的那样,用齐次坐标表示点的变换将非常方便,因此在附录B中所有的几何变换都将采用齐次坐标进行运算。
二维齐次坐标变换的矩阵的形式是:
这个矩阵每一个元素都是有特殊含义的。其中 可以对图形进行缩放、旋转、对称、错切等变换; 是对图形进行平移变换;[gh]是对图形作投影变换;[i]则是对图形整体进行缩放变换。
C.3正平行投影(三视图)
投影方向垂直于投影平面的投影称为正平行投影,通常所说的三视图均属于正平行投影。三视图的生成就是把xyz坐标系的形体投影到z=0的平面,变换到uvw坐标系。一般还需将三个视图在一个平面上画出,这时就得到下面的变换公式,其中(a,b)为uv坐标系下的值,tx、ty、tz均如图C-3所示。
计算机图形学第一讲

计算机图形学
计算机图形学概述
1.1 研究内容
1.2 发展历史 1.3 应用举例 1.4 当前研究动态
计算机图形学
1.1 研究内容
• 什么是图形? • 构成图形的要素是什么? • 图形有哪两种表示法?
• 图形学所研究的内容是什么?
计算机图形学
计算机图形学的研究内容涉及到用计算机对图形 数据进行处理的硬件和软件两方面的技术,以及与 图形生成、显示密切相关的基础算法: 1、二维图形元素的生成算法 点、直线、圆、弧、规则曲线、自由曲线、文 本等图元的生成。 2、二维图形的基本操作和图形处理算法 对图形的平移、缩放、旋转、镜像、错切等操 作,此外还包括二维图形的裁剪、多边形填充以及 二维图形的布尔运算(并、交、差)等。
计算机图形学
60年代 1963年,MIT林肯实验室的I. Sutherland发表了一篇 题为“Sketchpad:一个人机交互通信的图形系统” 的博士论文--确定了交互图形学作为一个学科分支 (提出基本交互技术、图元分层表示概念及数据结 构 )。 同时,雷诺汽车公司的工程师Pierre Bé zier 提出 Bé zier曲线、曲面的理论。 MIT的教授Steven A. Coons提出了超限插值的新思想, 通过插值四条任意的边界曲线来构造曲面。
计算机图形学
(3)用并行处理技术提高真实感图像的生成速 度 如采用多处理器,将一幅光栅图像的 512×512或更多个象素用几十个甚至几百个处 理器并行计算,可以明显提高图像的生成速度。 (4)探讨自然景象的模拟方法 采用纹理映射、分维技术、粒子系统等方法 再现景物表面的色彩和纹理细节,体现山峦的粗 糙岩面,重现云、火、水等飘忽不定的景色。 (5)科学可视化
计算机图形学
在医学领域,可视化有着广阔的发展前途
湖南工学院经济与管理学院学年论文实施细则
湖南工学院经济与管理学院学年论文实施细则为了培养学生的科学思想和科学态度,掌握科学方法,使学生具备初步的学术研究能力,发现问题、分析问题及解决问题的能力,撰写调查报告、理论研究性论文的能力以及与学习、大学生活相关方面的论文的写作能力,依照《湖南工学院学年论文管理规定(湖工教〔2015〕6号)》文件的相关规定,结合经济与管理学院的实际,特制定经济与管理学院学年论文的实施细则。
一、组织管理为了加强对学年论文的组织和管理,学院成立学年论文工作领导小组,成员及分工为:组长:杨凤鸣、赵少平;组员:朱纪红、李闯、李兴旺、袁鹏、黄飞;秘书:张艳红。
该领导小组的职责如下:1、制定《经济与管理学院学年论文实施细则》,审定学年论文教学大纲;2、审核学年论文指导教师的指导资格;3、审定学年论文的课题;4、组织研讨有关学年论文的教学改革,探索加强学年论文教学管理的途径和方法;5、组织学年论文档案管理工作,汇总学年论文教学文件(包括学年论文教学大纲、任务书、学年论文选题分析、学年论文评分表、学年论文情况分析表等);6、具体组织和管理学年论文工作,监督检查学年论文的进展情况;7、监督学年论文的完成质量,并组织学年论文的反抄袭检测;8、组织优秀论文的答辩和成果发表。
二、学年论文的工作程序(一)学年论文的选题1、在教师指导下,按照本专业的培养目标和专业方向,从本专业的基础理论、学术问题或从科技、教学和社会生活的实际问题中选定。
2、选题中来源于实际的题目不得低于总题目的50%。
3、坚持教师提供题目和学生自主选题相结合的原则,支持学生选做有创新特色的课题。
4、题目难易程度要适中,每名学生选题应不同,做到一人一题。
(二)指导教师对学生论文进行指导、评定,给出论文成绩。
(三)学院以教研室为单位汇总学年论文(按纸质文档汇总和电子文档分别进行汇总)。
(四)将学年论文成绩输入教务系统。
(五)将学年论文的资料上交学校存档。
三、学年论文的指导(一)指导教师的确定1、指导教师必须由具有讲师及以上职称或硕士研究生及以上学历的教师担任。
计算机图形学(第三版)孙家广课后习题答案

基本图形转换规范(IGES)
产品数据转换规范(STEP)等
2、CGI标准的主要功能是什么?试用CGI中的图形输出功能绘制一副机械零件图。
CGI的目的是提供控制图形硬件的一种与设备无关的方法,它可以看成是图形设备驱动
程序的一种标准。CGI在用户程序和虚拟设备之间,以一种独立于设备的方式提供图形信息
模型,迅速地修改图形模型的数据;并能够绘制显示修改后的图形模型。
GL是工作站或UNIX上广泛应用的一个工业标准图形程序库,和PHIGS同样是提供用户
与程序图形系统接口。包括基本图素、坐标变换、设置属性和显示方式、输入/输出处理、
真实图形显示。
相同点:
三个都是提供用户与输入输出设备之间的图形系统接口的标准图形程序库。
下面。就像饭馆的菜单一样,程序菜单显示选择列表。为了使屏幕整齐,会隐藏这些菜单,
只有在标题栏下的菜单栏中单击菜单标题之后才会显示菜单。例如,单击“画图”菜单栏中
的“图像”可显示“图像”菜单:
3、列出你所用过的图形输入、显示及输出设备的名称、型号、生产厂商、出厂时间及其主
要优缺点。
略
4、比较个人计算机与工作站的图形功能
{
float k ; //计算斜率
float b;
k=(by-ay)/(bx-ax);
b=ay-ax*k;
system.out.println(“直线的方程为:y=”+k+”x”+”+”+b);
}
}
例2、画矩形
class DrawPanel extends Jpanel
{ public void paint(Graphics g)
计算机图形学习题参考答案(完整版)
区域二(下半部分)
k (x k, yk) pk 0 (7, 3) b 2(x 0 1/2)2 a 2(y01)2a 2b 2 23 1 (8, 2) p02a 2y1a 22b 2x1 361 2 (8,1) p12a 2y2 a 2 297 3 (8, 0)
2a yk pk 2 2 2 1600 b a b (1/4)a 332 768 p0 2b2x1b2 224 768 p12b 2x 2 b 2 44 768 p2 2b 2x 3 b2 208 2 640 p3 2b x 4 b 22a 2y 4 108 640 p4 2b 2x 5 b 2 288 512 p5 2b 2x 6 b 22a 2y6 244 384
10、使用中点椭圆算法,绘制中心为 (0, 0) ,长半径 a 8 ,短半径 b 6 的椭圆在第一象限中的部分。 解: 区域一(上半部分)
k (x k, yk) 2b x k 0 (0, 8) 0 1 (1, 8) 72 2 (2, 8) 144 3 (3, 8) 216 4 (4, 7) 288 5 (5, 7) 360 6 (6, 6) 432 7 (7, 6) 504 8 8, 5
第 2 章 基本图元的显示
1、假设 RGB 光栅系统的设计采用 810 英寸的屏幕,每个方向的分辨率为每英寸 100 个像素。如果 每个像素 6 位,存放在帧缓冲器中,则帧缓冲器需要多大存储容量(字节数)? 解: 8100101006/8600000 (字节) 。 2、假设计算机字长为 32 位,传输速率为 1 MIP(每秒百万条指令) 。300 DPI(每英寸点数)的激光打 印机,页面大小为 8.511 英寸,要填满帧缓冲器需要多长时间。 解:
2
11、已知: A(0, 0) 、 B(1, 1) 、 C(2, 0) 、 D(1, 2) ,请判断多边形 ABCD 是否是凹多边形。 解: 多 边 形 的 边 向 量 为 AB (1,1, 0) , BC (1, 1, 0) , CD (1, 2, 0) , DA(1, 2, 0) 。 因 为
计算机图形学孙家广第三版第1章

1.3 计算机图形学的应用及研究前沿
计算机辅助设计与制造(CAD/CAM)
CAD/CAM是计算机图形学在工业界最广泛、 最活跃的应用领域
飞机、汽车、船舶的外形的设计 发电厂、化工厂等的布局 土木工程、建筑物的设计 电子线路、电子器件的设计 设计结果直接送至后续工艺进行加工处理,如波 音777飞机的设计和加工过程
ã à µ ¾ Î ª .25µ Ä Ö ù æ Ï Ã Ô Ê ¾ Æ ÷
ã à µ ¾ Î ª .28µ Ä Ç ò æ Ï Ã Ô Ê ¾ Æ ÷
柱面和球面显示器点距定义示意图
LCD显示器
CRT固有的物理结构限制了它向更广的显示领 域发展
屏幕的加大必然导致显象管的加长,显示器的体 积必然要加大,在使用时候就会受到空间的限 制 CRT显示器是利用电子枪发射电子束来产生图像, 容易受电磁波干扰
中国国画与书法的生成
GeorgLeabharlann s Winkenb1ach绘制的壶和碗 (Siggraph’96)
Salisbury绘制的茶壶(Siggraph’97)
Salisbury绘制的熊(Siggraph’97)
Oliver Deussen绘制的素描树 (Siggraph’2000)
1.4 图形设备
20世纪70年代
光栅图形学迅速发展
区域填充、裁剪、消隐等基本图形概念、及其相 应算法纷纷诞生
图形软件标准化
1974年,ACM SIGGRAPH的与“与机器无关的图 形技术”的工作会议 ACM成立图形标准化委员会,制定“核心图形系 统”(Core Graphics System) ISO发布CGI、CGM、GKS、PHIGS
基于工程图纸的三维形体重建
定义:从二维信息中提取三维信息,通过对这些 信息进行分类、综合等一系列处理,在三维空 间中重新构造出二维信息所对应的三维形体, 恢复形体的点、线、面及其拓扑关系,从而实 现形体的重建 优势:可以做装配件的干涉检查、以及有限元分 析、仿真、加工等后续操作,代表CAD技术的 发展方向
基于三视图的三维形体重建技术
第23卷 第2期2000年2月计 算 机 学 报CHINESE PUT ERSV o l.23N o.2Feb.2000基于三视图的三维形体重建技术刘世霞 胡事民 汪国平 孙家广(清华大学国家CAD 工程中心 北京100084)(清华大学计算机科学与技术系 北京100084)收稿日期:1999-04-27.本课题得到国家八六三高技术研究发展计划(863-511-842-004)和国家自然科学基金(69772019)的资助.刘世霞,女,1974年生,博士研究生,主要研究方向为计算机辅助设计与计算机图形学.胡事民,男,1968年生,获博士学位,副教授,主要研究方向为计算机辅助几何设计、计算机图形学、面向内容的图形图像检索.汪国平,男,1964年生,获博士学位,主要研究方向为计算机辅助几何设计与计算机图形学.孙家广,男,1946年生,教授,博士生导师,主要研究方向为计算机辅助设计、计算机图形学、产品数据管理与企业信息化.摘 要 基于工程图纸的三维形体的重建技术是根据形体的二维视图中的几何信息和拓扑信息,生成相应的三维形体,这是一个从低维到高维的构造过程.文中提出了一个三维形体重建算法.该算法首先根据三视图生成形体的线框图,然后应用左邻边搜索策略求出线框图内的所有面及相应的极小环,最后利用M oebius 规则及工程图的性质,删除重建过程中生成的非法元素.该方法利用二维几何基元和三维几何基元的几何性质及生成关系,减少了重建过程中的投影匹配次数,若干经典例子测试表明,算法速度比传统算法提高了约10倍.关键词 三视图,实体模型,三维重建中图法分类号:T P 391Reconstructing of 3D Objects from Orthographic ViewsLIU Shi-Xia HU Shi-Min WANG Guo -Ping SUN Jia-Guang(N ational CAD E ngine ering Ce nter at T singhua Univ ersity ,Beij ing 100084)(Depar tment of Comp uter S cience and Tech nology ,Tsing hua Univ ersity ,B eij ing 100084)Abstract T he technique to g enerate a so lid object fr om orthogr aphic view s is used to construct 3D objects accor ding to the g eometric and topolog ical inform atio n in eng ineering draw ing s,w hich is a process from lo w dim ension to high dim ensio n.A new alg orithm for reconstructing 3D so lid model is presented .Firstly ,a w irefram e is reconstructed from the orthographic views .Secondly ,all possible faces and its corresponding base loo ps ar e found in the w ireframe using the leftm ost searching rule.Finally ,all pseudo elem ents generated in reco nstr uctio n are deleted acco rding to the Moebius rule and the character o f o rtho graphic view s .T he number of ex amination is reduced by using the relationship between 2D inform ation in each view and 3D info rmatio n g enerated in reconstruction.The exper im ental results show that the algorithm requires about 10%of the pro-cessing time needed by the traditional m ethod.Keywords orthogr aphic v iew s,solid model,3D r econstruction1 引 言基于工程图纸的三维形体的重建技术是计算机辅助设计与计算机图形学中一个重要的研究领域,国内外研究者相继提出各种重建算法[1,2].Idesaw a [3]首先给出了三维重建方法的数学推理模型,该方法仅研究了非常有限的平面体的重建算法,但是他所提出的自底向上的方法成为其后许多三维形体重建算法的基础.M arkow sky 和Wesley [4,5]提出了一个适合任意多面体的重建算法,这一算法可生成满足输入三视图的多个解.Gu [6]部分地解决了平面体和柱面体的重建问题,将柱面体轴的自由度放宽到与某一坐标面平行.Yan [7]提出了适合平面体的重建算法,该算法使用决策树技术加快了三维边的生成速度.Shin [8]利用每一视图的二维信息和重建过程中产生的三维信息之间的关系,减少检测判断的次数,在一定程度上提高了算法的运行效率.以前的重建算法由于反复执行投影匹配操作和复杂的几何运算,需要较长的处理时间.本文工作的主要目的是减少重建过程的处理时间.在重建过程中,我们利用几何基元之间的几何性质和拓扑关系,减少了投影匹配的次数,避免了复杂的几何运算.在决策求解过程中,我们根据M oebius 规则和工程图的性质,省去了候选块生成这一步骤,简化了传统的决策求解.2 基本概念及定理定义1. 度:顶点v 所关联的边数称为该顶点的度.定义2. 左邻边序列:如图1所示,设e 1,e 2,…,e k 是平面F 内共点于Q 的k 条边,所对应的矢量分别设为QQ 1,QQ 2,…,QQ k .假设平面的外法矢为n ,那么边e j 最左邻边定义为:矢量QQ j 绕法矢n 逆时针转最大角度所遇到的矢量边.在图1中e 1的左邻边为e k ,e k 的左邻边为e k -1,…,e 2的左邻边为e 1.因此Q 点的左邻边序列为e 1e k e k -1…e 2(e 1).图1 左邻边序列定义3. 极小环:设L 是有界面F 上的一个环,如果L 满足如下性质,则称L 是F 上的一个极小环:环L 内没有与其共边的其它环;环L 的方向与有界面F 的法向满足右手螺旋定则.定义4. 非流形边:在重建过程生成的线框模型中,如果一条边与两个以上的面相关联,则称该边为非流形边(非流形边是决策求解过程的入口点).定义5. 切割点:两条非共线的边彼此相交,若交点不是边的端点,而是边的内点,那么我们称这样的交点为切割点.切割点至少在一个视图中的投影为两条非共线二维边的交,即它的投影点也是相应二维边的内点.性质1(空间点的投影特性). 设空间点P (x ,y ,z )在主视图投影面上的投影为(x f ,z f ),在俯视图投影面上的投影为(x t ,y t ),在侧视图投影面上的投影为(y s ,z s ),则有:x f =x t =x ,y t =y s =y ,z f =z s =z .性质2(对应原理). 若主视图、俯视图、侧视图3个视图中的二维点(x f ,z f ),(x t ,y t )和(y s ,z s )满足x f =x t ,y t =y s ,z f =z s ,那么它们对应于三维空间中的唯一点(x f ,y t ,z s ).3 三维形体重建算法本节主要讨论基于三视图的平面体的重建算法,与传统的自底向上的重建算法相比较,该算法省去了候选块的生成这一步骤.在重建过程中,我们首先根据对应原理,从三视图生成形体的三维顶点和三维边,初步构造出形体的线框模型.然后利用线框模型生成形体的面环,最后根据M oebius 规则和投影性质进行决策求解,获得最终的三维形体.算法的主要步骤为:检查整理输入数据;生成三维候选顶点;生成候选边;生成切割点;构造面环;决策求解.在形体重建过程中,所产生的顶点、边、面等未必都是最终形体的成分,有的可能是非法的,在重建过程中将被消除.为此,我们把这个过程中的顶点、边和面称为候选顶点、候选边和候选面,分别记为C _V ertex ,C _E dge 和C _Face .3.1 检查整理输入数据本算法的输入数据是屏幕坐标系下的三视图.为了获得重建算法所需的数据,首先需要找出3个视图的公共原点,然后分离3个视图.对于每一个视图,我们建立相应的二维顶点表Cnode List 和二维边表Cseg ment List,并检查输入数据的合法性.3.2 生成三维候选顶点为了生成所有的三维候选顶点,我们首先从两个不同视图的二维顶点表Cnode list 中各取一点,142计 算 机 学 报 2000年如果两点在共享轴上的坐标值相等,那么继续在第3个视图的二维顶点表中查找与上述两点除相同坐标值之外的其它两个坐标值完全相同的顶点.如果第3个视图的二维顶点表中存在这样的二维点,那么这3个二维顶点生成了一个C _Vertex .3.3 生成三维候选边为了降低处理时间,我们利用二维点、边和三维点、边之间的几何关系和生成规则,来减少投影匹配的次数.性质3. 垂直于某投影平面的直线段在该投影面上的投影是二重点(二维顶点).性质4. 设e 是由两个C _Ver tex 构成的线段,如果e 仅在一个视图中的投影包含在二维视图的边表中,则e 不是一条C _Edge .证明. 假设命题不成立,则出现下面两种情况.1)e 仅在一个视图中的投影为二维边,在其它两个视图中的投影为二维顶点;2)e 在3个视图中的投影均为二维顶点.以1)为例证明.由性质3可知仅当某条线段垂直于某一个投影平面时,它在该平面上的投影为二维顶点.为了满足条件1),e 应该同时垂直于两个投影平面.然而,一条直线段不可能同时垂直于两个非平行平面,出现矛盾.同理可证假设2)也不成立.因而一条属于三维形体的边至少在两个投影平面的投影为二维边.证毕.新的三维边生成方法主要是利用上述性质来加快C _E dge 的生成.为了充分利用上述性质,我们采用如图2所示的数据结构.新三维候选边的生成方法为:对于每一视图的二维边,从二维边两个端点的C _V ertex 表中各取一点,连接这两点形成的三维边为e ,将e 投影到另外两个视图中进行匹配判断.在匹配过程中,利用图2的数据结构,我们仅需查找与该三维边某一端点的投影点相关联的二维边,减少了匹配判断次数,降低了运行时间.我们将在第4节分析算法的效率.图2 用于生成三维候选边的数据结构3.4 生成切割点在第3.2节,我们给出了一般顶点的生成方法,然而形体中可能存在切割点(如图3中的点P ),不能通过前述方法生成.为了得到合法的线框图,我们在线框模型中引入切割点.图3 切割点示意图由切割点的定义和投影的性质可知,切割点至少在一个视图中的投影为两条非共线二维边的交点,并且这一交点不是该视图中二维边的端点,而是二维边的内点.按照惯例,这类二维点是不出现在二维视图中的.然而为了能够生成相应的线框图,我们需要求出该二维点及与其相关联的二维边[7].利用这一性质,在三视图的预处理中,对两个非共线的二维边求交获得此二维点的同时,我们将这样的二维顶点放入到一个临时的二维点表中,并记录与其相关联的两条二维边.此处我们仅检测这些二维顶点,由通过该二维顶点的两条二维边找到其生成的三维边,对两个三维边进行求交获取切割点.3.5 生成三维面及面环本节将讨论从线框模型中提取表面信息的算法.目前常用的表面信息自动识别方法为几何方法[9].该方法的基本思想是:根据相邻两条边的类型来确定一个三维面及其方程,然后应用深度优先方法搜索该面中的所有边,生成所有可能的面环,最后应用一定的准则删除非极小环.由上面的讨论可知,几何方法的几何运算复杂,需要较多的存储空间和较长的处理时间.针对这一不足,我们提出了左邻边序列法,这一方法仅需生成构造形体的面所需要的环,避免了非极小环的生成,节省了算法的处理时间和存储空间.算法主要包含6步:1.选择未处理过的凸顶点v i 作为跟踪起点;2.选择未组合过的共点于v i 且不共线的边对e l (v l ,v i ),e m (v i ,v m ),假设由这两条边所组成的面F 的法向为n =(v i -v l )×(v m -v i ),找出属于该面的所有边E (F ),确定该平面顶点和边的连接关系.对于度大于2的顶点,求出该顶点的左邻边序列;1432期刘世霞等:基于三视图的三维形体重建技术3.从E(F)中选择一条未被引用过的边e i(v i,v j)作为初始边;4.根据已知条件,选择一遍历方向,假设v i→v j是目前的遍历方向;5.如果v j的度为2,则将与该点相关联的另外一条边加入到环中,否则根据该点的左邻边序列确定环中的下一条边,假设这条边为e l(v j,v l);6.若v l=v i,生成环并返回到步骤2,否则令v j=v l,转步骤4;注:在寻找一个面的所有边时,我们仅检测与该面上已知顶点相关联的边,并且属于该面的共点边对均认为已经组合过,不再用于求解新的面方程,这样就减少了面及面环生成过程的判断次数.另外,确定左邻边序列时,我们并不求出两边的夹角,而通过下述方法来简化计算.设共点于v i的边为e1,e2,…, e k,将e1作为x轴,将该平面的法向量看作是z轴,那么y=z×x.设《n》x,《n》y为x轴和y轴的单位向量,e1和e i夹角的正、余弦为:n x e i=cos in y e i=sin i (i=2,…,k)(1)通过比较co s i和sin i(i=2,…,k),可以确定相应夹角的大小关系,进而可以求出该点的左邻边序列.这样就避免了反余弦求角计算,降低了运算复杂度.3.6 决策求解从前面的讨论可知,三维形体的点和边是重建过程中生成的三维线框模型的子集.即,三维线框模型中可能包含假元.因而重建的关键技术是检测并删除线框模型中的假元.Wesley和M arkow sky[5]首先给出与候选块(Candidate block)有关的决策求解方法,目前许多B-rep重建使用这种方法.该方法生成许多临时候选块,然后组合这些候选块,构造所有可能的形体,并检查每个合法形体的三视图是否与输入数据完全匹配.然而,算法中临时生成的某些候选块可能会相交,在其边界上产生非法的交线.为了避免两个候选块之间存在非法交线,传统方法引入了原三维形体中并不存在的临时的“切割边”.切割边将刚生成的候选面分割成较小的候选面.然后交替引用每一面,组合出所有的候选块.从上面的讨论可知,传统决策求解方法不仅搜索复杂度是指数级的,而且切割边的引入也是十分费时和浪费存储空间的,特别是当形体中包含曲面时.为了避免这种穷举搜索策略和切割边的引入,我们给出与面有关的决策求解方法.该方法利用一些决策规则搜索求解最终的三维形体.本节使用的决策规则主要是基于M oebius规则和工程图的性质.我们首先介绍组成形体的边应满足的两个条件.(1)局部条件(M oebius规则):2-流形体中的每一条边属于两个面,三维边在每个面中的方向不同,即属于两个面的边在两个面环中的方向相反;(2)全局条件:组成形体的任意两个面除了构成它们的边之外,不能再有任何交线.决策求解算法的基本思想是根据形体的局部条件和全局条件删除线框模型中的非流形边,并使生成的形体满足输入的三视图.为了确保生成的三维形体与输入的视图匹配,我们采取下述方法.对于二维视图中的每一条二维边s i,我们计算出该二维边所对应的三维边总数n i.在构造三维形体的过程中,我们可能会删去线框模型中的一部分边,这时二维视图中一部分二维边的n i值将会减少.决策方法的目标是在保证每一个n i为正数的前提下,生成有效的三维形体.图4给出决策求解方法图4 匹配过程所采用的数据结构中所用的数据结构.下面给出决策求解算法.1.在生成的线框模型中寻找非流形边,设为e i.2.在与e i相关联的面中选出任意两个未组合的面,设这两个面为合法面,将两个面的所有边均标识为T RU E,删除与e i相关联的其它面,并检查删除边所对应二维边的n i 值是否为0,若为0,返回2,否则转3;3.检查线框模型中是否存在仅与一个面相关联的边,若不存在,转向5,否则,转向4;4.删除该面和该边,检查删除边所对应二维边的n i值是否为0,若为0,返回2,否则转5;5.检测是否存在与现有合法面相交于内部的面,若存在,则该面为非法面,删除该面,转向3,若不存在,转向6;6.对于线框模型中投影线为虚线的边,检测是否有面遮挡它,若有,转向7,否则,转向2;7.检测是否所有边的表示均为T R U E,若是,生成形体,否则转向1.基于以上算法步骤,我们使用Visual C++实现了一个原型实验系统,图5给出了应用新方法进行重建的机械零件.144计 算 机 学 报 2000年图5 重建的机械零件4 算法效率分析本节详细分析了重建主要阶段的算法复杂性,并以实际物体为例,比较了本文所提出的算法与传统的以Gujar [10]和Shin [8]为代表的重建方法的运行效率.图6、图7给出了应用本文的算法进行重建的例子,实验结果表明,与传统算法相比较,该算法在保持存储空间不变的情况下,运行速度提高了10倍左右.图6 重建物体1图7 重建物体2(1)候选边生成阶段的算法效率分析:传统的三维边的生成方法为:在生成的C _Vertex 表中任取两点,为了检测这两点的连线是否为一条C _Edge ,需要将这条新生成的C _E dge 重新投影到三视图中,并与三视图的二维点表和边表进行匹配.如果该线段的投影包含在3个视图的二维点表或边表中,则该边是一条C _Edge .该方法再投影的次数为n (n -1)/2,其中n =card (C _Vertex s ).每一C _E dge 的匹配时间复杂度为O (m ),m 为三视图中二维线段与顶点之和.对于复杂的形体,这一过程势必导致处理时间的迅速增加.而新算法的再投影次数为m s n -2.m s 为二维边数,n -是每一个二维点所生成的C _Vertex 平均数,且n -满足1 n- 3n ,即m s n -2<<n 2.每一C _Edge 的匹配时间复杂度为O (1).表1给出了候选边生成过程的运行时间的比较,由表1可知,本文所提出的算法显著减少了处理时间.1452期刘世霞等:基于三视图的三维形体重建技术表1 生成候选边所需处理时间的比较重建物体传统方法(A )(ms)新方法(B )(ms )A /B 物体11370628947.4物体21589035744.5(2)切割点生成阶段的算法效率分析:传统的方法从生成的三维候选边表中任取两条边,通过求交获取切割点,因而传统切割点生成方法的求交次数为n e (n e -1)/2,其中n e 为C _E dge 总数.我们方法的求交次数为n -s n-2e ,其中n -s 是度 4的二维顶点数,n -e 是投影通过这些二维顶点的C _E dge 平均数.由于2n -s n -e <n e ,n -e <<n e ,所以n -s n -2s <<n 2e .表2 生成切割点所需处理时间的比较重建物体传统方法(A )(ms)新方法(B )(ms )A /B 物体17408.290.24物体27007.692.11(3)面及面环生成阶段的算法效率分析:表3给出了提取表面信息阶段算法运行时间的比较,由表3可知本文所提出的方法需要较少的处理时间.表3 生成面及面环所需处理时间的比较重建物体传统方法(A )(ms)新方法(B )(ms )A /B 物体138541050 3.67物体2332110423.19(4)决策求解阶段的算法效率分析:表4给出了决策求解阶段运行时间的比较,表4表明本文所提出的方法需要较少的处理时间,这是因为我们的方法省去了候选块的生成这一步骤,避免传统穷举搜索策略和切割边的引入,从而降低了运行时间.表4 决策求解所需处理时间的比较重建物体传统方法(A )(ms )新方法(B )(ms )A /B 物体1905112.3735.85物体2916213.1699.39上面列出了重建主要阶段的算法运行时间,加上其它一些必要处理过程的运行时间,我们给出了整个重建过程的处理时间比较(见表5),实验结果表明我们的重建算法提高了构造正确形体的效率,节省了90%以上的运行时间.表5 整个重建过程的处理时间比较重建物体传统方法(A )(ms)新方法(B )(ms )A /B 物体128580260910.955 结 论由于传统的重建过程中存在大量的投影匹配和复杂的几何操作,所以需要较长的处理时间.我们利用二维和三维几何基元之间的几何性质和拓扑关系,减少了投影匹配的次数,避免了复杂的几何运算.另外,通过利用M oebius 规则和工程图的性质,简化了形体的生成过程.未来的工作将集中在扩大形体的覆盖域,由于本文的工作是以2-流形体为例进行研究的,因此,本文的算法可以推广到复杂二次曲面体的情形,我们将另文讨论[11].致 谢 本文得到了赵致格、陈玉健教授的指导和帮助,左征、张慧、袁波、雍俊海博士,黄小蕾、许云杰同学提出了许多宝贵意见,在此一并致谢.参考文献1Nagendra I V,Gujar U G.3-D Objects fr om 2-D orth og raph ic view s ——A puter &Graphics ,1988,12(1):111-1142W an g W eidong ,Grinstein G G.A su rvey of 3D solid recon-s tru ction from 2D projection line draw puter Graphics Forum ,1993,12(2):137-1583Idesaw a M asanori.A s ystem to gen erate a s olid fig ure from thr ee view.Bulletin of th e J apan Society of M echanical Engi-neerin g,1973,16(92):216-2254M ark ow s ky G ,Wesley M A .Fles hing ou t w ire frames .IBM J ournal of Research and Developmen t,1980,24(5):582-5975W es ley M A.M arkow sk y G.Flesh ing out projection.IBM J ournal of Research and Developmen t ,1981,25(6):934-9546Gu Kaining ,Tang Zesheng,S un J iagu ang.Recons tr uction of 3D solid objects from orth ograph ic pu ter Graphics Foru m,1986,5(4):317-3247Yan O ,Ch en C L P ,T ang Z .Efficien t algorith m for the recon-s tru ction of 3D object from orthographic put-er-Aided Design,1994,26(9):699-7178S hin Byeong -Seok ,S hin Yeong Gil .Fas t 3D solid model recon-s tru ction from orth og raph ic view puter-Aided Des ign,1998,30(1):63-769Kuo M H.Reconstruction of quadric s urface solids from three orthographic view s [Ph D thesis ].Department of Compu ter S ci-ence,U nivers ity of Nottingham,UK,199610Gujar U G,Nagend ra I V .Cons truction of 3D s olid objects from orthographic view s .Compu ter &Graphics ,1989,13(4):505-52111Liu S hixia,Hu S himin,Chen Yujian,S un Jiaguang.Recon-s tru ction of curvilinear objects from th ree orthograp hic view s.In :Proceedings of the 6th International Confer ence on Comput-er Aided Des ign &C om puter Graphics ,Shangh ai,1999.1040-1044(in Chin es e)(刘世霞,胡事民,陈玉健,孙家广.基于工程图的三维曲面体重第六届计算机辅助设计与计算机图形学国际会议论1999.1040-1044146计 算 机 学 报 2000年。
计算机图形学第三版答案

计算机图形学第三版答案【篇一:《计算机图形学》第1-5章课后习题参考答案】计算机图形学研究的基本内容?答:见课本p5-6页的1.1.4节。
2、计算机图形学、图形处理与模式识别本质区别是什么?请各举一例说明。
答:计算机图形学是研究根据给定的描述,用计算机生成相应的图形、图像,且所生成的图形、图像可以显示屏幕上、硬拷贝输出或作为数据集存在计算机中的学科。
计算机图形学研究的是从数据描述到图形生成的过程。
例如计算机动画制作。
图形处理是利用计算机对原来存在物体的映像进行分析处理,然后再现图像。
例如工业中的射线探伤。
模式识别是指计算机对图形信息进行识别和分析描述,是从图形(图像)到描述的表达过程。
例如邮件分捡设备扫描信件上手写的邮政编码,并将编码用图像复原成数字。
3、计算机图形学与cad、cam技术关系如何?答:见课本p4-5页的1.1.3节。
4、举3个例子说明计算机图形学的应用。
答:①事务管理中的交互绘图应用图形学最多的领域之一是绘制事务管理中的各种图形。
通过从简明的形式呈现出数据的模型和趋势以增加对复杂现象的理解,并促使决策的制定。
②地理信息系统地理信息系统是建立在地理图形基础上的信息管理系统。
利用计算机图形生成技术可以绘制地理的、地质的以及其它自然现象的高精度勘探、测量图形。
③计算机动画用图形学的方法产生动画片,其形象逼真、生动,轻而易举地解决了人工绘图时难以解决的问题,大大提高了工作效率。
5、计算机绘图有哪些特点?答:见课本p8页的1.3.1节。
6、计算机生成图形的方法有哪些?答:计算机生成图形的方法有两种:矢量法和描点法。
①矢量法:在显示屏上先给定一系列坐标点,然后控制电子束在屏幕上按一定的顺序扫描,逐个“点亮”临近两点间的短矢量,从而得到一条近似的曲线。
尽管显示器产生的只是一些短直线的线段,但当直线段很短时,连成的曲线看起来还是光滑的。
②描点法:把显示屏幕分成有限个可发亮的离散点,每个离散点叫做一个像素,屏幕上由像素点组成的阵列称为光栅,曲线的绘制过程就是将该曲线在光栅上经过的那些像素点串接起来,使它们发亮,所显示的每一曲线都是由一定大小的像素点组成的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在几何造型系统中,根据特征的参数我们并不 能直接得到特征的几何元素信息,而在对特 征及在特征之间进行操作时需要这些信息。 特征方法表示形体的覆盖域受限于特征的种类。
应用系统
用户
特征造型器
特征模型
几何造型器
几何模型
图3.2.8 基于特征的造型系统
R H L W H H R
(a)方块
(b)圆柱 图3.2.9 特征形状表示
CSG表示可以看成是一棵有序的二叉树。 其终端节点或是体素、或是形体变换参数。 非终端结点或是正则的集合运算,或是变换(平 移和/或旋转)操作,这种运算或变换只对其紧 接着的子结点(子形体)起作用。
CSG树是无二义性的,但不是唯一的.
CSG表示的优点: 数据结构比较简单,数据量比较小,内部数据的 管理比较容易; CSG表示可方便地转换成边界(Brep)表示; CSG方法表示的形体的形状,比较容易修改。 CSG表示的缺点: 对形体的表示受体素的种类和对体素操作的种类 的限制,也就是说,CSG方法表示形体的覆盖域 有较大的局限性。
对形体的局部操作不易实现,例如,不能对基本 体素的交线倒圆角; 由于形体的边界几何元素(点、边、面)是隐含 地表示在CSG中,故显示与绘制CSG表示的形体需 要较长的时间。
(c)特征表示
从应用层来定义形体,因而可以较好的表达设 计者的意图。从功能上可分为形状、精度、 材料和技术特征。 特征是面向应用、面向用户的。特征模型的表 示仍然要通过传统的几何造型系统来实现。 不同的应用领域,具有不同的应用特征。
观看GEMS5.0演示 欧拉操作 选读
欧拉操作 对于任意的简单多面体,其面 (f) 、边 (e)、 顶点(v)的数目满足 欧拉公式 v-e+f=2 对于任意的正则形体,引入形体的其它几 个参数:形体所有面上的内孔总数 (r) 、 穿透形体的孔洞数 (h) 和形体非连通部分 总数(s),则形体满足公式: v - e + f = 2(s-h) + r
2.构造表示。通常有扫描表示、构造实体 几何表示和特征表示三种。
(a)扫描表示体。
扫描是生成三维形体的有效方法 用扫描变换产生的形体可能出现维数不一致的问 题。 扫描方法不能直接获取形体的边界信息,表示形 体的覆盖域非常有限。
(b)构造实体几何表示(CSG).通过对体素定义 运算而得到新的形体的一种表示方法。体素 可以是立方体、圆柱、圆锥等,也可以是半 空间,其运算为变换或正则集合运算并、交、 差。
点是三维空间的一个位置 边可以是直线边或曲线边,边的端点可以重合。 环是由首尾相接的一些边组成,而且最后一条边的终点 与第一条边的起点重合;环也可以是一个孤立点。外 壳是一些点、边、环、面的集合; 外壳是一些点、边、环、面的集合。 区域由一组外壳组成。 模型由区域组成。
model region
中心线 剖切平面
将形体按某种规则分解为小的更易于描述的部分,每 一小部分又可分为更小的部分,这种分解过程直至每 一小部分都能够直接描述为止。 (a)将形体空间细分为小的立方体单元。这种表示方 法的优点是简单,容易实现形体的交、并、差计算, 但是占用的存储量太大,物体的边界面没有显式的解 析表达式,不便于运算。
(b)八叉树法表示形体.首先对形体定义一个外接立方 体,再把它分解成八个子立方体,并对立方体依次 编号为0,1,2,…,7。如果子立方体单元已经一 致,即为满(该立方体充满形体)或为空(没有形 体在其中),则该子立方体可停止分解;否则,需 要对该立方体作进一步分解,再一分为八个子立方 体。在八叉树中,非叶结点的每个结点都有八个分 支。
C=A∩B
C*=A∩*B
为了能够处理非正则形体,产生了非正则 造型技术。 九十年代以来,基于约束的参数化、变量 化造型和支持线框、曲面、实体统一表 示的非正则形体造型技术已成为几何造 型技术的主流。
3.6.2 形体表示模型
在实体模型的表示中,基本上可以分 为分解表示、构造表示和边界表示三大类。 1、分解表示
(6)kef(e),删除一条边e和该边的一个邻面f。 (7)kemr(e),删除一条边e,生成该边某一邻面上的一新的 内环。 (8)mekr(v1,v2,e),连接两个点v1、v2,生成一条新的边e, 并删除掉v1和v2所在面上的一个内环。 (9)kfmrh(f1,f2),删除与面f1相接触的一个面f2,生成面f1 上的一个内环,并形成体上的一个通孔。 (10)mfkrh(f1,f2),删除面f1上的一个内环,生成一个新的 面f2,由此也删除了体上的一个通孔。
拓扑信息描述形体上的顶点、边、面的连接关系, 拓扑信息形成物体边界表示的“骨架”。 形体的几何信息犹如附着在“骨架”上的肌肉。
U
图3.2.10 边界表示
Brep表示的优点是:
表示形体的点、边、面等几何元素是显式表示 的,使得绘制Brep表示的形体的速度较快, 而且比较容易确定几何元素间的连接关系; 容易支持对物体的各种局部操作,比如进行倒 角。 便于在数据结构上附加各种非几何信息,如精 度、表面粗糙度等。
shell face use loop use edge use vertex use topology 图3.2.12 face loop edge vertex geometry 辐射边数据结构
实体 中心线
图3.2.13 一个用辐射边结构表示的 非正则形体模型
清华大学国家CAD工程中心开发的几何造型系统GEMS5.0中,采用 的数据结构如图
一些非正则形体的实例
(a)有悬面
(b)有悬边
(c)邻面
集合运算(并、交、差)是构造形体的基 本方法。正则形体经过集合运算后,可 能会产生悬边、悬面等低于三维的形体。 Requicha在引入正则形体概念的同时,还 定义了正则集合运算的概念。正则集合 运算保证集合运算的结果仍是一个正则 形体,即丢弃悬边、悬面等。
优点主要是: (1)形体表示的数据结构简单。
(2)简化了形体的集合运算。只需同时遍历参加 集合运算的两形体相应的八叉树,无需进行复杂的 求交运算。 (3)简化了隐藏线(或面)的消除,因为在八叉 树表示中,形体上各元素已按空间位置排成了一定 的顺序。 (4)分析算法适合于并行处理。 八叉树表示的缺点:占用的存储多,只能近似表示 形体,以及不易获取形体的边界信息等。
左外环
右外环 边
图3.2.11
左 下 边
翼边数据结构
右 边 下 右
上 边
边 上 左
辐射边:为了表示非正则形体,1986年, Weiler提出了辐射边(Radial Edge)数据结 构。
辐射边结构的形体模型由几何信息和拓扑信息两 部分组成。
几何信息有面(face)、环(loop)、边(edge)和点 (vertex) 拓扑信息有模型(model)、区域(region)、外壳 (shell)、面引用(face use)、环引用(loop use)、 边引用(edge use)和点引用(vertex use)。
边界表示的数据结构
翼边数据结构:在1972年,由美国斯坦福 大学Baumgart作为多面体的表示模式提 出。
它用指针记录了每一边的两个邻面(即左外环 和右外环)、两个顶点、两侧各自相邻的两 个邻边(即左上边、左下边、右上边和右下 边),用这一数据结构表示多面体模型是完 备的,但它不能表示带有精确曲面边界的实 体。
(c)圆锥
构造表示的特点:
构造表示通常具有不便于直接获取形体几何元 素的信息、覆盖域有限等缺点, 但是,便于用户输入形体,在CAD/CAM系统中, 通常作为辅助表示方法。
3.边界表示(BR表示或BRep表示)
按照体-面-环-边-点的层次,详细记录了 构成形体的所有几何元素的几何信息及其相互 连接的拓扑关系。 边界表示的一个重要特点是在该表示法中,描 述形体的信息包括几何信息(Geometry)和拓 扑信息(Topology)两个方面。
3.6形体在计算机内的表示
3.6.1 引言
计算机中表示形体,通常用线框、表面和实体三种模型。线 框模型和表面模型保存的三维形体信息都不完整,只有实 体模型才能够完整的、无歧义的表示三维形体。 几何造型历史:早期的线框表示 实体造型与曲面造型 70’ 独立发展 到 互相溶合 NURBS + 边界表示
正则形体 对于任一形体,如果它是3维欧氏空间中非 空、有界的封闭子集,且其边界是二维 流形(即该形体是连通的),我们称该 形体为正则形体,否则称为非正则形体。
3. 环。环(Loop)是有序、有向边(Edge) 组成的封闭边界。环有方向、内外之分,外 环边通常按逆时针方向排序,内环边通常按 顺时针方向排序。 4.面。面(Face)由一个外环和若干个内环 (可以没有内环)来表示,内环完全在外环 之内。
若一个面的外法矢向外,称为正向面;反之,称 为反向面。
面的形状可以是平面或曲面。平面可用平 面方程来描述,曲面可用控制多边形或型 值点来描述,也可用曲面方程(隐式、显 式或参数形式)来描述。对于参数曲面, 通常在其二维参数域上定义环,这样就可 由一些二维的有向边来表示环,集合运算 中对面的分割也可在二维参数域上进行。 5.体。体(Body)是面的并集。
为了方便对形体的修改,还定义了两个辅助的操作: 公共端点。 (11)semv(e1,v,e2),将边e1分割成两段,生成一个新的点v 和一条新的边e2。 (12)jekv(e1,e2),合并两条相邻的边e1、e2,删除它们的 公共端点。 以上十种欧拉操作和两个辅助操作,每两个一组,构成 了六组互为可逆的操作。 可以证明:欧拉操作是有效的,即用欧拉操作对形体操 作的结果在物理上是可实现的;欧拉操作是完备的, 即任何形体都可用有限步骤的欧拉操作构造出来。
Brep表示的缺点是:
数据结构复杂,需要大量的存储空间,维护内部数据结 构的程序比较复杂; Brep表示不一定对应一个有效形体,通常运用欧拉操作 来保证Brep表示形体的有效性、正则性等。