简单的机械设计作品【机械设计大作业】
全国大学生机械工程创新设计大赛案例《直立式自行车停车装置》

直立式自行车停车装置本案例荣获全国大学生机械工程创新设计大赛一等奖1.设计目的自行车自从被发明以来,一直是人们重要的交通工具之一。
近年来有鉴于机动车尾气对环境所造成的影响,在各级政府、民间机构以及热心厂商的鼎力支持和积极协助下,人们开始以更宽广的视角正视自行车在休闲、健康、环境保护及观光旅游等方面的功能,构建骑车环境、提升骑乘风气,实践自行车新生活,让自行车发挥更大效益。
在高度发展的城市中,土地资源极其有限。
自行车乱停乱放、失窃等问题,一直困扰着城市发展。
自行车成为休闲运动后,多功能与高单价的产品不断推出,自行车停放的问题更加突显。
本装置就是一种可以将自行车直立停放以节省空间、实现自行车有序停放的自行车停车装置。
2.工作原理1)整体展示直立式自行车停车装置提供了一种简单机械用于自行车竖直停放。
如图1所示,本装置主要由前轮固定装置、U型锁解锁装置、升降机构及用于导引前轮固定装置升降的导轨组成。
2)细节说明为了更好地介绍本项目,现结合图2所示的装置示意图来进一步说明。
前轮固定装置中,U型锁4用于卡自行车前轮,卡锁板9用于卡U型锁,限位挡板与卡锁板9通过长销连接,限制卡锁板向下转动。
将自行车前轮对准U型锁4后向里推,U型锁4顶起卡锁板9,然后卡锁板9卡住U型锁4,进而锁住前轮。
U型锁解锁装置中,弹簧13与踏板12连接,用脚踩下踏板后弹簧13的弹力能够使踏板12复位。
向下踩踏板,经连杆11传动,推销10向上运动,将卡锁板9顶起,U型锁4解锁,可以顺利取出自行车。
升降前轮固定装置的升降机构中,蜗轮蜗杆减速电动机7带动旋转轴6转动,钢丝绳拉动滑块3 沿导杆5上升,实现自行车直立放置。
用于导引前轮固定装置升降的导杆5由两个SBR箱式滑块导轨组成,导杆一端与下支承板垂直固定连接,另一端与上支承板垂直固定连接。
两导轨互相平行,距离固定。
两导轨与滑块3配合,实现前轮固定装置的升降运功。
3 .设计方案1)操作方法停车时:(1)将自行车前轮对准U型锁4,然后推动自行车向前。
(机械制造行业)哈工大机械设计大作业——螺旋起重器
(机械制造行业)哈工大机械设计大作业——螺旋起重器哈工大机械设计大作业——螺旋起重器一、概述本次大作业的主题是设计一款螺旋起重器,旨在为机械制造行业提供一种高效、稳定、实用的起重设备。
螺旋起重器是一种通过旋转螺旋轴来提升或降低重物的机械设备,具有结构简单、操作方便、承载能力强等优点。
二、设计要求1.提升能力:最大提升重量为2吨,且在提升过程中不得出现明显的晃动或倾斜现象。
2.旋转速度:旋转速度应可调节,以便根据实际需要调整提升速度。
3.稳定性:设备应具备较高的稳定性,以保证在提升重物时不会发生明显的晃动或倾斜。
4.结构紧凑:设备结构应尽量紧凑,以减少占地面积和重量。
5.操作简便:设备应易于操作,控制精度高,以便实现高效准确的提升。
三、设计方案1.总体结构:螺旋起重器主要由旋转轴、螺旋杆、支撑架、电机和控制系统组成。
旋转轴通过轴承与支撑架连接,支撑架起到稳定和支撑整个设备的作用。
螺旋杆与旋转轴连接,通过旋转轴的旋转实现重物的升降。
电机和控制系统负责驱动旋转轴和调节旋转速度。
2.旋转轴设计:旋转轴是螺旋起重器的核心部件,它需要承受重物的重量和旋转时的扭矩。
因此,我们选择高强度钢材作为旋转轴的材料,并对其进行优化设计以提高其强度和刚度。
此外,我们在旋转轴上设置了一些加强肋和凸起,以提高其抗扭强度。
3.螺旋杆设计:螺旋杆是直接与重物接触的部件,其设计对设备的稳定性和提升能力有重要影响。
我们选择优质钢材作为螺旋杆的材料,并对其进行抛光和强化处理以提高其耐磨性和抗拉强度。
螺旋杆的长度和直径根据实际需要进行了优化设计,使其既能保证设备的稳定性,又能满足最大提升重量的要求。
4.支撑架设计:支撑架是整个设备的支撑结构,其稳定性直接关系到设备的性能。
我们采用高强度钢材制作支撑架,并对其进行优化设计以提高其抗弯强度和抗扭强度。
此外,我们还设置了多个支撑腿以增加设备的稳定性。
5.电机和控制系统设计:电机和控制系统是整个设备的驱动和控制中心。
机械设计大作业千斤顶
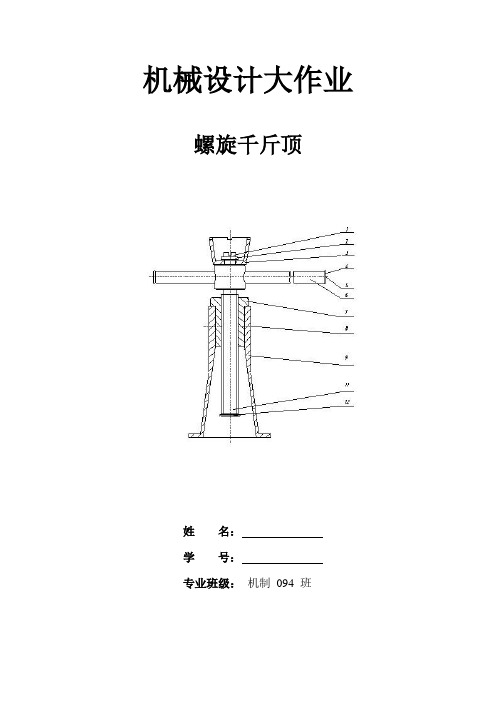
机械设计大作业螺旋千斤顶姓名:学号:专业班级:机制094 班按第四强度理论,压-扭组合校核][)2.0(3)4(2311221σπσ≤+=d T d F ca 22234223/75][/0.60)252.010258.9(3)3510254(mm N mm N ca =<=⨯⨯⨯+⨯⨯⨯=σπσ满足要求图1螺杆受力图 2.自锁性验证 自锁条件 v ϕψ<其中︒=77.3ψ ︒=55.10v ϕ故 v ϕψ<,可用034~4'︒︒<ψ,可靠3.螺杆机构(见图3.1.2) 螺杆上端直径mm d D 8.60~4.5432)9.1~7.1()9.1~7.1(2=⨯== 取 mm D 602=手柄孔径)1~5.0(+≈p k d d 试中:mm d p 28=(计算在后) 则 mm d k 29~5.28)1~5.0(28=+= 取 mm d k 29=,4.22~2.1932)7.0~6.0()7.0~6.0(mm d d =⨯==' 取mm d 22='退刀槽直径8.24~5.24)5.0~2.0(25)5.0~2.0(1=-=-=d d c mm2/0.60mm N ca =σ满足螺杆强度要求mm D 602=mm d k 29= mm d 25='图2 螺杆简图(二)螺母的设计计算螺母的材料选用铸铁HT300 1.确定螺纹旋合圈数Z 依[1]P120式(6-19),根据耐磨性计算螺纹旋合圈数Z ,即]['2p hH d FP P ≤=π hp d Fz ][2π≥ 由[1]P120表6.5,查取2/15][mm N P =(滑动速度<2.4m/min)10.63152910253=⨯⨯⨯⨯≥πz螺母实际圈数6.75.110.65.1'=+=+=z z取 8'=z ,则5.65.185.1'=-=-=z z螺母旋合长度(又叫工作高度) mm P z H 4868''=⨯=⋅=校核螺母的高径比,655.129/48/'2===Φd H ,查[1]P120,兼作支撑的螺母5.3~5.2=φ,不能满足要求。
机械设计大作业二设计螺旋起重器(千斤顶)

机械设计大作业二-设计螺旋起重器(千斤顶)机械设计大作业报告二:设计螺旋起重器(千斤顶)一、设计题目:螺旋起重器(千斤顶)的设计二、设计背景与目的在工程领域,起重器是必不可少的设备之一,用于进行物体的提升、降落和搬运。
螺旋起重器作为一种常见的起重器,具有结构简单、操作方便、稳定性好等优点。
本次设计的目的是设计一款结构合理、性能稳定的螺旋起重器(千斤顶),以满足实际工程应用的需求。
三、设计要求与参数1.设计要求(1)最大起重量:1000kg(2)最大起重高度:100mm(3)螺旋直径:16mm(4)螺旋长度:根据实际需要确定(5)设备应具有足够的强度和稳定性,能够承受较大的载荷和冲击。
2.设计参数(1)材料选择:优质碳素结构钢(如Q235)(2)驱动方式:手动操作(3)传动方式:螺旋传动(4)结构形式:采用紧凑型设计,便于携带和使用。
四、设计步骤与方案1.确定总体方案根据设计要求和参数,确定螺旋起重器的总体方案。
主要包括传动方式、结构形式、操作方式等。
考虑到手动操作的特点,设计时应注重设备的便携性和易用性。
2.结构设计根据总体方案,进行结构设计。
主要包括螺旋部分的长度、直径和材质选择,以及支撑部分的材料和结构形式等。
在设计过程中,应考虑到设备的强度、刚度和稳定性要求。
3.传动系统设计根据总体方案和结构设计,进行传动系统的设计。
主要包括传动轴的直径、长度和材质选择,以及齿轮或蜗轮蜗杆等传动元件的选择和设计。
在设计过程中,应考虑到传动效率、平稳性和使用寿命等因素。
4.操作系统设计根据总体方案和结构设计,进行操作系统的设计。
主要包括操作手柄的形状、长度和材质选择,以及操作机构的运动方式和结构设计等。
在设计过程中,应考虑到操作简便、省力和安全等因素。
5.校核与分析对所设计的螺旋起重器进行校核与分析,主要包括强度校核、刚度校核和稳定性分析等。
确保设备能够满足实际工程应用的要求,具有较高的安全性和可靠性。
6.图纸绘制与说明根据所设计的螺旋起重器,绘制相关图纸,包括总装图、部件图和零件图等。
机械设计大作业二

机械设计大作业二说明书课程名称:机械设计设计题目:螺旋起重器的设计院系:机电工程学院班级:设计者:学号:指导教师:设计时间: 2012 年 9月 16日设计题目:第三章螺纹传动设计表3.1 螺旋起重器的示意图及已知数据设计要求:⑴绘制装配图一张,画出起重器的全比结构,按照比例装配图要求标注尺寸、序号及填写明细栏、标题栏、编写技术要求。
⑵撰写设计说明书一份,主要包括起重器各部分尺寸的计算,对螺杆和螺母螺纹牙强度、螺纹副自锁性、螺杆的稳定性的校核等。
96.3e Mpa σ==由参考文献[1]表5.9可以查得螺杆材料的许用应力[]3~5sσσ=,355s Mpa σ=,则相应的[]71~118Mpa σ=,取[]100Mpa σ=。
显然,[]e σσ<,螺杆满足强度条件。
3.3 螺纹牙强度校核螺母螺纹牙根部剪切强度条件为:][4τπτ≤=b D Z Fq 式中:Fq ——轴向载荷,N ;D 4——螺母螺纹大径,mm;Z ——螺纹旋合圈数,Z 取10;b ——螺纹牙根部厚度,mm ,梯形螺纹b=0.65P=0.65×6mm=3.9mm 。
代入数值计算得400009.910330.656MPa τπ==⨯⨯⨯⨯ 查参考文献[1]表8.12滑动螺旋副材料的许用剪应力[]30~40MPa τ=,显然[]ττ<。
螺母螺纹牙根部的弯曲强度条件为:][324b Q b b D Z l F σπσ≤=式中:l ——弯曲力臂 423329222D d l mm --===; 其它参数同上。
代入数值计算得 2340000215.2201033(0.656)b MPa σπ⨯⨯==⨯⨯⨯ 查参考文献[1]表8.12得螺母材料许用弯曲应力40~60b Mpa σ=。
显然,[]b b σσ<,即满足螺纹牙的强度条件。
3.4 螺纹副自锁条件校核螺纹副自锁条件为:'arctan ','f =≤ρρψ 其中,216arctan arctan 3.767929np d ψππ⨯===⨯ ︒==1427.509.0arctan 'ρ因为ϕ≤'ρ,所以满足螺纹副满足自锁条件。
《机械精度设计》大作业示例模板
机械精度设计课程大作业题目:圆柱齿轮减速器输出轴的精度设计
班级:
姓名:
学号:
圆柱齿轮减速器输出轴的精度设计
如图所示为一圆柱齿轮减速器输出轴,该轴材料为45钢,生产批量为大批量,该轴上的φ55mm轴颈分别与两个规格相同的0级滚动轴承的内圈配合,轴承工作时外圈固定,内圈与轴颈一起旋转,负荷状态为轻负荷,φ60mm的轴径和φ45mm轴头分别与齿轮基准孔配合,φ62mm轴段的两端面分别为齿轮和滚动轴承内圈的轴向定位基准面,试设计该轴的尺寸精度、几何精度、表面精度,并将设计结果以零件图的形式表达。
1、轴类零件的结构简图(电子版)
说明:表达出零件的结构和基本尺寸即可,各项公差要求是要设计的部分,无需标注。
2、评分标准(该表可单独作为1页)
3、轴类零件的精度设计图(A3手绘)TG801 65 P224。
简单机械创新设计案例
简单机械创新设计案例在现代社会,机械设计已经成为了各行各业中不可或缺的一部分。
简单机械作为机械设计的基础,其创新设计更是推动了整个机械行业的发展。
本文将以一些简单机械创新设计案例为例,探讨这些设计是如何应用于实际生产中的。
首先,我们来看一个简单的机械创新设计案例,手摇发电机。
传统的手摇发电机需要人们通过手摇来产生电能,但是这样的方式效率低下且费力。
而经过创新设计后的手摇发电机,通过改进内部结构和材料,使得手摇发电机在同样的手摇力度下可以产生更多的电能,而且还减少了使用者的劳动强度。
这种创新设计不仅提高了发电效率,也提升了用户体验,使得手摇发电机在一些偏远地区得到了更广泛的应用。
其次,我们来看另一个简单机械创新设计案例,折叠自行车。
传统的自行车在停放时需要占用大量的空间,而且不方便携带。
而经过创新设计后的折叠自行车,通过改进车架结构和采用轻质材料,使得自行车可以在不使用时进行折叠,从而大大减小了占用空间,方便用户携带。
这种创新设计不仅提高了自行车的便携性,也符合了现代人追求便利和环保的需求,因此受到了越来越多人的青睐。
最后,我们再来看一个简单机械创新设计案例,智能门锁。
传统的门锁需要使用钥匙开启,存在安全性低和使用不便的问题。
而经过创新设计后的智能门锁,通过加入指纹识别、密码输入、远程控制等功能,使得门锁更加安全可靠,且使用更加便捷。
这种创新设计不仅提高了门锁的安全性,也符合了现代人对智能家居的需求,因此在市场上得到了广泛的应用。
通过以上的简单机械创新设计案例,我们可以看到,创新设计对于机械产品的改进和发展起到了至关重要的作用。
只有不断地进行创新设计,才能满足人们对于机械产品功能、性能、使用体验等方面的需求,推动整个机械行业朝着更加高效、便捷、智能的方向发展。
因此,我们应该更加重视简单机械的创新设计,不断探索和尝试,为机械行业的发展注入新的活力和动力。
大学生机械创新设计大赛作品——多功能折叠椅

整体外观图 主要功能: 主要功能:
一、高度升降功能 二、迷你桌子功能 三、可调角度减震靠背功能
高度升降功能
旋转螺母
通过旋动螺杆 上的螺母, 上的螺母,改 变交叉架之间 的水平距离来 实现升降功能。 实现升降功能。
迷你桌子功能
桌子不用时, 桌子不用时,通过可动 套筒挂在椅子的侧面。 套筒挂在椅子的侧面。 使用时, 使用时,将桌子移至把 手前端, 手前端,并从外侧将桌 子旋转270度至右图 子旋转 度至右图
并把桌子折叠部 分打开(如左图) 分打开(如左图)
可调角度减震靠背功能
有力的作用
当两边紧固螺丝 拧紧的的时候, 拧紧的的时候, 靠背被固定, 靠背被固定,当 需要调节靠背角 度时, 度时,可将靠背 调成适宜角度, 调成适宜角度, 然后拧紧两边的 螺丝, 螺丝,当两边的 螺丝都拧松时, 螺丝都拧松时, 可作为减震靠背
扭动螺母固定位置
使用时将桌子移至把手前端并从外侧将桌子旋转270度至右图可调角度减震靠背功能有力的作用扭动螺母固定位置当两边紧固螺丝拧紧的的时候靠背被固定当需要调节靠背角度时可将靠背调成适宜角度然后拧紧两边的螺丝当两边的螺丝都拧松时可作为减震靠背
构分析图
扶手桌子部分 靠背部分 底座部分
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简单的机械设计作品【机械设计大作业】
《机械设计》齿轮设计程序
#include
#include
floatmin(floatx,floaty);
floatmax(floatx,floaty);
voidmain()
{intB1,B2,b,z1,z2;
floatP1,u,T1,Kt,FAId,CHlim1,CHlim2,S,n1,j,l,ZE,N1,N2,KHN 1,KHN2,
d1t,v,mt,h,p,KA,KV,KH1,KH2,KF1,KF2,YFa1,YFa2,YSa1,YSa2,C FE1,CFE2,
KFN1,KFN2,CH1,CH2,CH,CF1,CF2,a,d1,d2,m,w,K,bt,z1t,z2t,q;
printf("请输入小齿轮的齿数z1和齿数比u:\n");
scanf("%f%f",&z1t,&u);
printf("下面进行齿面强度计算\n");
printf("请输入输入功率P1,小齿轮的转速n1,j,齿轮工作时间l:\n");
scanf("%f%f%f%f",&P1,&n1,&j,&l);
T1=(9550000*P1)/n1;
N1=60*n1*j*l;
N2=N1/u;
printf("T1=%10.4eN1=%10.4eN2=%10.4e\n",T1,N1,N2);
printf("请输入接触疲劳寿命系数KHN1,KHN2:\n");
scanf("%f%f",&KHN1,&KHN2);
CH1=KHN1*CHlim1/S;
CH2=KHN2*CHlim2/S;
CH=min(CH1,CH2);
printf("CH1=%10.4f\nCH2=%10.4f\nCH=%10.4f\n",CH1,CH2,CH);
printf("\n");
printf("请输入载荷系数Kt,齿宽系数FAId,弹性影响系数
ZE:\n");
scanf("%f%f%f",&Kt,&FAId,&ZE);
q=pow(ZE/CH,2)*Kt*T1*(u+1)/(FAId*u);
d1t=2.32*pow(q,1.0/3.0);
v=3.1415926*d1t*n1/60000;
bt=FAId*d1t;
mt=d1t/z1t;
h=2.25*mt;
p=bt/h;
printf("d1t=%10.4fv=%10.4fmt=%10.4fp=%10.4f\n",d1t,v,mt, p);
printf("\n");
printf("根据v,P和精度等级查KV,KH1,KF1,KH2,KF2,KA:\n");
scanf("%f%f%f%f%f%f",&KV,&KH1,&KF1,&KH2,&KF2,&KA);
K=KA*KV*KH1*KH2;
d1=d1t*pow(K/Kt,1.0/3.0);
m=d1/z1t;
printf("d1=%10.4fm=%10.4f\n",d1,m);
printf("\n");
printf("请输入齿根弯曲强度计算所需的弯曲疲劳强度极限CFE1和
CFE2,KFN1,KFN2,S:\n");scanf("%f%f%f%f%f",&CFE1,&CFE2,&KFN1, &KFN2,&S);
CF1=KFN1*CFE1/S;
CF2=KFN1*CFE2/S;
K=KA*KV*KF1*KF2;
printf("请输入齿形系数YFa1、YFa2和应力校正系数YSa1、YSa2\n");
scanf("%f%f%f%f",&YFa1,&YFa2,&YSa1,&YSa2);
w=max(YFa1*YSa1/CF1,YFa2*YSa2/CF2);
m=pow(2*Kt*T1*w/(FAId*z1t*z1t),1.0/3.0);
printf("m=%10.4f\n",m);
printf("请根据上述计算值选取m:\n");
scanf("%f",&m);
z1t=d1/m;
z2t=u*z1t;
printf("z1t=%10.4fz2t=%10.4f\n",z1t,z2t);
printf("请根据z1t,z2t选择合适的z1,z2:\n");
scanf("%d%d",&z1,&z2);
d1=z1*m;
d2=z2*m;
a=(d1+d2)/2;
bt=FAId*d1;
printf("bt=%f\n",bt);
printf("请选择合适的b值:\n");
scanf("%d",&b);
B2=b;
B1=B2+5;
printf("z1=%dz2=%dd1=%5.2fd2=%5.2f\nm=%5.2f B2=%d\n",z1,z2,d1,d2,m,a,B1,B2);
printf("\n");
}
floatmin(floatx,floaty)
{
if(x>=y)
returny;
else
returnx;a=%5.2fB1=%d
}
floatmax(floatx,floaty)
{
if(x>=y)
returnx;
else
returny;
}
程序中未说明的参数说明:
z1,z2——小齿轮、大齿轮的齿数;d1,d2——小齿轮、大齿轮的分度圆直径;m——模数;a——中心距;B1,B2——大小齿轮的宽度;
N1,N2——应力循环次数;K——载荷系数;
KFN1,KFN2——弯曲疲劳寿命系数;
j——齿轮每转一圈,同一齿面啮合的次数。