纯电动汽车整车控制器的设计
纯电动汽车整车控制器(vcu)研究
车辆工程技术 2 车辆技术纯电动汽车整车控制器(VCU)研究宋述铨(天津优控智行科技有限公司,天津 300000)摘 要:电动汽车主要由电池管理系统(BMS),整车控制系统(VCS),以及电机控制器(MCU)等构成。
整车控制器(VCU)是电动汽车的重要控制结构,对汽车的各种信息进行检测、对车内通信网络和异常信息进行监控等,能够提高整车驾驶性能,进行制动能量回馈完善能源管理。
提升整车舒适性,使用户获得完美体验。
关键词:纯电动汽车;整车控制器;完美体验 随着社会的发展与科技的进步,各个城市的汽车使用户喷井式增加。
传统的内燃机汽车消耗石油,排出大量废气,使得城市的空气质量不断下降。
纯电动汽车由于不使用传统化石能源,对环境不造成污染,受到人们的青睐。
随着科技的进步,电动汽车的核心技术不断地革新与突破,逐渐完善的城市基础设施提供了有利的帮助,电动汽车已经成为潜力股,逐步取代传统汽车变为可能。
本文从汽车结构出发,结合整车信息传输过程,设计了整车控制器的软硬件结构。
1 整车电控系统组成 整车电控系统主要由整车控制器VCU为核心,通过硬线信号指挥各控制器使能,通过CAN总线信号控制储能系统、电机系统等关键总成执行相应的上下电动作以及扭矩指令。
最终完成整车的驾驶运行以及高压充电。
其中,低压部分完成车辆控制器供电和信号采集通讯。
高压部分通过高压线束将动力电池的电能传输到空调压缩机、电动机等高压供电设备,实现动力电能的传输。
其中电机、电池、电控系统被称为“三电”系统,主要包括:1.1 整车控制器 整车控制器系统为整车的运行大脑,具有高可靠性、高运行效率、逻辑缤密性。
整车控制系统上电后首先运行初始化程序并且自检,在自身没有问题后驱动端口使能储能系统、电机系统上电。
储能系统和电机系统完成上电后同样分别进行上电自检。
所有系统自检无故障且驾驶员有上高压指令时,整车控制系统通过总线驱动储能系统、电机系统完成上高压动作。
1.2 储能系统 储能系统包括动力电池组和BMS管理单元。
纯电动汽车整车控制器(TAC)
整车控制器通过CAN总线接口连接到整车的CAN网络上与整车其余控制节点进行信息交换和控制。
控制器硬件包括微处理器、CAN通信模块、BDM调试模块、串口通信模块、电源及保护电路模块等。微处理器选用了Motorola公司专门为汽车电子开发的MCgS12,它具有运算速度快和内部资源与接口丰富的特点,适合实现整车复杂的控制策略和算法。CAN通信模块符合CAN2.0B技术规范,采用了光电隔离、电源隔离等多项抗干扰设计;BDM调试模块用于实时对控制程序进行调试、修改;串口通信模块用于对控制系统的诊断和标定; 电源模块进行了二级滤波的冗余设计,保证控制器在车载12V系统供电情况下正常工作,并具短路保护功能。
其硬件结构框图如图一所示。
整车控制器实物图如图二所示。
性能指标:
1)工作环境温度: -30℃—+80℃
2)相 对湿度: 5%~93%
3)海 拔高度: 不大于3000m
4)工作电压: 18VDC—32VDC
5)防护等级: IP65
功能指标:
1)系统响应快,实时性高
2)采用双路CAN总线(商用车SAE J1939协议)
3)多路模拟量采样(采样精度10位);2路模拟量输出(精度12位)
4)多路低/高端开关输出
5)多路I/O输入
6)关键信息存储
7)脉冲输入捕捉
8)低功耗,休眠唤醒功能
该项目使用的INFINEON的物料清单:
TC1782
TLE7368-Biblioteka ETLE6240GPBTS4880R
IPG20N06S2L-65
电动汽车VCU和BMS集成控制器硬件设计

一、概述
整车控制器是纯电动汽车控制系统的核心,它负责接收驾驶员的控制指令,根 据车辆的运行状态和电池的电量等信息,控制车辆的加速、减速、制动等动作, 同时还要监控电池的状态和充电情况,保证车辆的安全性和续航能力。
二、硬件设计
1、中央控制单元
中央控制单元是整车控制器的核心部件,它负责处理各种传感器和开关量信号, 根据车辆的运行状态和驾驶员的意图,控制车辆的加速、减速、制动等动作。 同时,中央控制单元还要与电池管理系统、充电控制系统等其他部件进行通信, 实现整车信息的实时监控和控制。
5、通信接口:BMS需要与VCU、充电桩等其他设备进行数据交换。因此,需要 配置相应的通信接口,如CAN、LIN等。考虑到电池管理系统的通信需求和数 据安全性,应选择具有高速、稳定、安全的通信接口。
6、故障诊断和处理单元:BMS应具备故障诊断和处理能力,能够对电池组进行 实时监测和故障预警。因此,需要配置相应的故障诊断和处理单元,包括故障 检测、故障处理、故障记录等功能。
电动汽车VCU和BMS集成控 制器硬件设计
目录
01 一、VCU硬件设计
03
三、VCU和BMS的集成 设计
02 二、BMS硬件设计 04 参考内容
随着环保意识的不断提高和电动汽车技术的不断发展,电动汽车在交通领域的 应用越来越广泛。作为电动汽车的关键部分,车辆控制单元(VCU)和电池管 理系统(BMS)的集成控制对于整车的性能和安全性具有至关重要的意义。本 次演示将探讨电动汽车VCU和BMS集成控制器的硬件设计。
(4)安全保护措施:采用防电击、防泄漏等安全保护措施确保人员的安全。
3、可维护性设计
可维护性是指控制系统出现故障时容易维修和恢复的程度。在硬件设计过程中, 应考虑以下几点:
纯电动汽车整车控制器软件设计
纯电动汽车整车控制器软件设计作者:文 / 杨凡来源:《时代汽车》 2020年第15期杨凡湖南猎豹汽车股份有限公司湖南省长沙市 410100摘要:整车控制器作为电动汽车的控制核心部件之一,对电动汽车的动力经济性、平顺性和安全性都有很大的影响。
本文以某纯电动汽车为对象,针对其整车控制需求进行分析,采用基于模型的开发方式,对其整车控制策略进行设计,实现了整车控制软件所需的功能。
关键词:电动汽车整车控制器控制软件Software Design of the Vehicle Control Unit for Battery Electric VehicleYang FanAbstract:As one of the core control components of electric vehicles, thevehicle control unit has great influence on the power economy, ride comfort and safety of electric vehicles. This paper takes a battery electric vehicle as the object, analyzes its vehicle control requirements, adopts a model-based development method, designs its vehicle control strategy, and realizes the functions requiredby the vehicle control software.Key words:electric vehicle,vehicle control unit, control software近年来,随着国内消费者对电动汽车的认可度不断提升,电动汽车市场不断扩容,各整车企业纷纷加大电动汽车的研发投入。
汽车电动汽车用电机及控制器布置规范
电动汽车用电机及控制器布置规范1范围本蟒准规定了电动汽车用电机及控制器(以下荷称电机及控制器)及其相关附件的布置形式和布置原则°本标准适应于本公司生产的混合动力、纯电动等所有新能源车型.2规范性引用文件下列文件对于本文件的应用是必不“少的。
凡是注日期的引用文件,仪所注日期的版本适用于本文件。
凡是不注日期的引用文件,其量新版本(包括所有的修改单)适用于本文件。
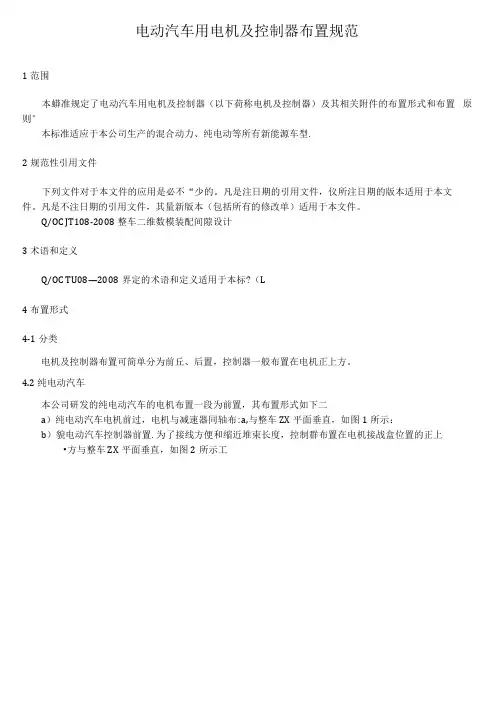
Q/OC JT108-2008整车二维数模装配间隙设计3术语和定义Q/OC TU08—2008界定的术语和定义适用于本标?(L4布置形式4-1分类电机及控制器布置可简单分为前丘、后置,控制器一般布置在电机正上方。
4.2纯电动汽车本公司研发的纯电动汽车的电机布置一段为前置,其布置形式如下二a)纯电动汽车电机前过,电机与减速器同轴布:a,与整车ZX平面垂直,如图1所示:b)貌电动汽车控制器前置.为了接线方便和缩近堆束长度,控制群布置在电机接战盒位置的正上•方与整车ZX平面垂直,如图2所示工图1前置电机布置形式I图2前亘控翻器布克形式]<3混合动力汽车混合动力汽车的电机布置M以前置也可以后置,其布置形式如下,El)混合动力汽车电机前置,电机与发动机同轴布置与整车ZX平面垂直,如图3所示:b)混合动力汽车控制楼而置,为了接线方便和筋短缓束长度,同时要避让发动机及其附件J控制器布置在电机上方与整车ZX平面垂直,如图4所示Fc)混合动力汽车电机及控制器后置,为了实现四强功能,发动机前置,电驱动桥后:B・电机及控制器后置,电机与旗速器同轴布丘修整车ZX平面垂直.图3前五电机布适形式n图4前置控制赤布置形式II图5后置电机布置形式对于电机、控制器及其附件的布置,底保证工作川配J井能灌足整车布置的需要和整车性能的发挥;应保证机舱与发动机、变速器,底盘之间布置和设计的合理也电机及控制器的通风散热.诏音隔热良好,与其他零部件最小间隙合理、拆卸方便F同时还要保证安装T艺性、有足热的刚度和强度.一般从以下几个方面进行布置考出r动、除占间隙要求工装配工艺性要求;雄脩方便性等要求:。
纯电动汽车整车控制器的构成、原理、功能说明
纯电动汽车整车控制器的构成、原理、功能说明整车控制器是电动汽车正常行驶的控制中枢,是整车控制系统的核心部件,是纯电动汽车的正常行驶、再生制动能量回收、故障诊断处理和车辆状态监视等功能的主要控制部件。
整车控制器包括硬件和软件两大组成部分,它的核心软件和程序一般由生产厂商研发,而汽车零部件供应商能够提供整车控制器硬件和底层驱动程序。
现阶段国外对纯电动汽车整车控制器的研究主要集中在以轮毂电机驱动的纯电动汽车。
对于只有一个电机的纯电动汽车通常不配备整车控制器,而是利用电机控制器进行整车控制。
国外很多大企业都能够提供成熟的整车控制器方案,如大陆、博世、德尔福等。
1整车控制器组成与原理纯电动汽车整车控制系统主要分为集中式控制和分布式控制两种方案。
集中式控制系统的基本思想是整车控制器独自完成对输入信号的采集,并根据控制策略对数据进行分析和处理,然后直接对各执行机构发出控制指令,驱动纯电动汽车的正常行驶。
集中式控制系统的优点是处理集中、响应快和成本低;缺点是电路复杂,并且不易散热。
分布式控制系统的基本思想是整车控制器采集一些驾驶员信号,同时通过CAN总线与电机控制器和电池管理系统通信,电机控制器和电池管理系统分别将各自采集的整车信号通过CAN总线传递给整车控制器。
整车控制器根据整车信息,并结合控制策略对数据进行分析和处理,电机控制器和电池管理系统收到控制指令后,根据电机和电池当前的状态信息,控制电机运转和电池放电。
分布式控制系统的优点是模块化和复杂度低;缺点是成本相对较高。
典型分布式整车控制系统示意图如下图所示,整车控制系统的顶层是整车控制器,整车控制器通过CAN总线接收电机控制器和电池管理系统的信息,并对电机控制器、电池管理系统和车载信息显示系统发送控制指令。
电机控制器和电池管理系统分别负责驱动电机和动力电池组的监控与管理,车载信息显示系统用于显示车辆当前的状态信息等。
典型分布式整车控制系统示意图下图为某公司开发的纯电动汽车整车控制器组成原理图。
电动汽车整车控制器(VCU)技术及开发流程深度剖析
电动汽车整车控制器(VCU)技术及开发流程深度剖析焉知焉知·焉能不知整车控制器(VCU)作为电动汽车上全部电⽓的运⾏平台,它的性能优劣,直接影响其他电⽓性能的发挥,是整车性能好坏的决定性因素之⼀。
1、组成1.1结构组成VCU,结构上,由⾦属壳体和⼀组PCB线路板组成。
1.2硬件组成功能上由主控芯⽚及其周边的时钟电路、复位电路、预留接⼝电路和电源模块组成最⼩系统。
在最⼩系统以外,⼀般还配备数字信号处理电路,模拟信号处理电路,频率信号处理电路,通讯接⼝电路(包括CAN通讯接⼝和RS232通讯接⼝)。
2、各电⽓与VCU之间是怎样⼯作的⼀些⽤于监测车体⾃⾝状态的信号或者车载部件中⽐较重要的开关信号、模拟信号和频率信号,由传感器直接传递给VCU,⽽不通过CAN总线。
电动汽车上的其他具有独⽴系统的电⽓,⼀般通过共⽤CAN总线的⽅式进⾏信息传递。
2.1直接传递的信号们开关信号:钥匙信号,档位信号,充电开关,制动信号等;模拟信号:加速踏板信号,制动踏板信号,电池电压信号等;频率信号,⽐如车速传感器的电磁信号。
输出的开关量,动⼒电池供电回路上的接触器和预充继电器,在⼀些车型上,由VCU负责控制。
2.2通过CAN交互的电⽓单元CAN总线上的通讯参与者地位不分主从,随时随地向总线发动信息。
信息之间的先后顺序由发出信息者的优先级确定。
优先级在通讯协议中已经做出规定,每条信息⾥都有发信者的地址编码;通讯中的信息编码,都有相应的通讯协议予以明确规定。
谁发出什么样的代码提供哪些类型的信息,主要依据是供需双⽅的约定。
2.2.1 VCU与动⼒电池系统动⼒电池是纯电动汽车动⼒的唯⼀来源。
VCU与电池管理系统(BMS)通过整车CAN总线进⾏信息交互。
动⼒电池包实时监测并上报给VCU参数包括:总电流,总电压,最⾼单体电压,最低单体电压,最⾼温度,电池包荷电状态SOC,某些系统还监测电池包健康状态SOH。
VCU发送给电池包的命令包括充电,放电和开关指令:充电,在最初的充电连接信号确认后,整车处于禁⽌⾏车状态,VCU交出控制权。
国内外电动汽车整车控制器(VCU)性能指标及设计思路
国内外电动汽车整车控制器(VCU)性能指标及设计思路一、国外产品介绍(1)丰田公司整车控制器丰田公司整车控制器的原理图如下图所示:该车是后轮驱动,左后轮和右后轮分别由2个轮毂电机驱动。
其整车控制器接收驾驶员的操作信号和汽车的运动传感器信号,其中驾驶员的操作信号包括加速踏板信号、制动踏板信号、换档位置信号和转向角度信号,汽车的运动传感器信号包括横摆角速度信号、纵向加速信号、横向加速信号和4个车轮的转速信号。
整车控制器将这些信号经过控制策略计算,通过左右2组电机控制器和逆变器分别驱动左后轮和右后轮。
(2)日立公司整车控制器日立公司纯电动汽车整车控制器的原理图如下图所示。
图中电动汽车是四轮驱动结构,其中前轮由低速永磁同步电机通过差速器驱动,后轮由高速感应电机通过差速器驱动。
整车控制器的控制策略是在不同的工况下使用不同的电机驱动电动汽车,或者按照一定的扭矩分配比例,联合使用2台电机驱动电动汽车,使系统动力传动效率最大。
当电动汽车起步或爬坡时,由低速、大扭矩永磁同步电机驱动前轮。
当电动汽车高速行驶时,由高速感应电机驱动后轮。
(3)日产公司整车控制器日产聆风LEAF是5门5座纯电动轿车,搭载锂离子电池,续驶里程是160km。
采用200V家用交流电,大约需要8h可以将电池充满;快速充电需要10min,可提供其行驶50km的用电量。
日产聆风LEAF的整车控制器原理图如下图所示,它接收来自组合仪表的车速传感器和加速踏板位置传感器的电子信号,通过子控制器控制直流电压变换器DC/DC、车灯、除霜系统、空调、电机、发电机、动力电池、太阳能电池、再生制动系统。
(4)英飞凌新能源汽车VCU & HCU解决方案该控制器可兼容12V及24V两种供电环境,可用于新能源乘用车、商用车电控系统,作为整车控制器或混合动力控制器。
该控制器对新能源汽车动力链的各个环节进行管理、协调和监控,以提高整车能量利用效率,确保安全性和可靠性。
纯电动汽车整车控制器(VCU)设计方案
纯电动车辆以整车控制器为主节点、基于高速 CAN 总线的分布式动力系统 控制网络,通过该网络,整车控制器可以对纯电动车辆动力链的各个环节进行管 理、协调和监控,提高整车能量利用效率,确保车辆安全性和可靠性。整车控制 器的功能如下: 1) 车辆驾驶:采集司机的驾驶需求,管理车辆的动力。 2) 网络管理:监控通信网络,信息调度,信息汇总,网关。 3) 故障诊断处理:诊断传感器、执行器和系统其他部件的故障,并进行相应的
纯电动汽车整车控制器 设计方案书
目录
1 整车控制器控制功能和原理 ................................................................................................................... 1 2 电动汽车动力总成分布式网络架构 ....................................................................................................... 2 3 整车控制器开发流程 ............................................................................................................................... 3
整车控制器(VCU)策略及开发流程
整车控制器(VCU)策略及开发流程一、VCU的作用与功能在电动汽车中,VCU是核心控制部件,它根据加速踏板位置、档位、制动踏板力等驾驶员的操作意图和蓄电池的荷电状态计算出运行所需要的电机输出转矩等参数,从而协调各个动力部件的运动,保障电动汽车的正常行驶。
此外,可通过行车充电和制动能量的回收等实现较高的能量效率。
在完成能量和动力控制部分控制的同时,VCU还可以与智能化的车身系统一起控制车上的用电设备,以保证驾驶的及时性和安全性。
因此,VCU的设计直接影响着汽车的动力性、经济性、可靠性和其他性能。
1、VCU主要功能1)整车能量分配及优化管理;根据驾驶员的具体操作和实际工况对车辆进行管理、优化及调整,以实现优化能量供给,延长车辆使用寿命,提高车辆运行经济性。
2)故障处理及诊断功能;对出现的异常情况进行诊断、提示和主动修复工作。
3)系统状态仪表显示;4)整车设备管理监控各设备运行状态,及时进行动态调整。
5)系统控制根据既定的操控程序对驾驶员的各项操作进行及时响应,实时与数据库进行比对,对各节点进行动态控制。
二、VCU的结构VCU为纯电动汽车的调度控制中心,负责与车辆其他部件进行通信,协调整车的运行。
VCU系统结构,如下图所示。
其主要包含电源电路、开关量输入/输出模块、模拟量输入模块及CAN通讯模块。
1)电源模块从车载12V蓄电池取电,开关量输入模块接收的信号主要有钥匙信号、挡位信号、制动开关信号等;2)开关量输出信号主要是控制继电器,其在不同整车系统中意义略有不同,一般情况下控制如水泵继电器及PTC继电器等;3)模拟量输入模块采集加速踏板和制动踏板开度信号及蓄电池电压信号等;4)CAN模块负责与整车其他设备通信,主要设备有电机控制器(MCU)、电池管理系统(BMS)及充电机等。
三、整车通信网络管理整车系统通过CAN通信网络将各个子控制系统连接在一起。
整车系统通讯网络结构如下图所示。
VCU起到协调管理整个通信网络的功能,是各个子设备的通信服务端。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
纯电动汽车整车控制器的设计
发表时间:2019-07-05T11:27:03.790Z 来源:《电力设备》2019年第4期作者:王坚
[导读] 摘要:随着社会的发展与科技的进步,各个城市的汽车使用户喷井式增加。
(柳州五菱汽车工业有限公司广西柳州 545007)
摘要:随着社会的发展与科技的进步,各个城市的汽车使用户喷井式增加。
传统的内燃机汽车消耗石油,排出大量废气,使得城市的空气质量不断下降。
纯电动汽车由于不使用传统化石能源,对环境不造成污染,受到人们的青睐。
随着科技的进步,电动汽车的核心技术不断地革新与突破,逐渐完善的城市基础设施提供了有利的帮助,电动汽车已经成为潜力股,逐步取代传统汽车变为可能。
本文从汽车结构出发,结合整车信息传输过程,设计了整车控制器的软硬件结构。
关键词:纯电动汽车;整车控制器;硬件设计;软件设计
纯电动汽车作为新能源汽车的一种,以其清洁无污染、驱动能源多样化、能量效率高等优点成为现代汽车的发展趋势。
整车控制器(vehicle control unit,VCU)作为纯电动汽车整车控制系统的中心枢纽,主要实现数据采集和处理、控制信息传递、整车能量管理、上下电控制、车辆部件控制和错误诊断及处理、车辆安全监控等功能。
国外在纯电动汽车整车控制器的产品开发中,积极推行整车控制系统架构的标准化和统一化,汽车零部件厂商提供硬件电路和底层驱动软件,整车厂只需要开发核心应用软件,有利的推动了整车行业的快速发展。
虽然国内各大汽车厂商基本掌握了整车控制器的设计方案,开发技术进步明显,但是对核心电子元器件、开发环境的严重依赖,所以导致了整车控制器的国产化水平较低。
本文以复合电源纯电动汽车作为研究对象,针对电动汽车应有的结构和特性,对整车控制器的设计和开发展开研究。
一、整车控制系统分析与设计
(一)整车控制系统分析
复合电源纯电动汽车整车控制系统主要由整车控制器、能量管理系统、整车通信网络以及车载信息显示系统等组成。
首先纯电动汽车整车控制器通过采集启动、踏板等传感器信号以及与电机控制器、能量管理系统等进行实时的信息交互,获取整车的实时数据,然后整车控制器通过所有当前数据对驾驶员意图和车辆行驶状态进行判断,从而进入不同的工况与运行模式,对电机控制系统或制动系统发出操控命令,并接受各子控制器做出的反馈。
保障纯电动汽车安全可靠运行,并对各个子控制器进行控制管理的整车控制器,属于纯电动汽车整车控制系统的核心设备。
整车控制器实时地接收传感器传输的数据和驾驶操作指令,依照给定的控制策略做出工况与模式的判断,实现实时监控车辆运行状态及参数或者控制车辆的上下电,以整车控制器为中心通信节点的整车通信网络,实现了数据快速、可靠的传递。
(二)整车控制系统设计
复合电源的结构设计,选择了超级电容与DC/DC串联的结构,双向DC/DC跟踪动力电池电压来调整超级电容电压,使两者电压相匹配。
为了车辆驾驶运行安全,同时为了更好地使超级电容吸收纯电动汽车的再生制动能量,在复合电源系统中动力电池与一组由IGBT组成双向可控开关,防止了纯电动汽车处于再生制动状态时,动力电池继续供电,降低再生制动能量的吸收效率。
整车CAN通信网络设计,由整车控制器(VCU)、电机控制器(motor control unit,MCU)、电池管理系统(battery management system,BMS)、双向DC/DC控制器以及汽车组合仪表等控制单元(Electronic Control Unit,ECU)组成了复合电源纯电动汽车的整车通信网络。
二、整车控制器硬件设计及软件设计
(一)整车控制器结构设计
整车控制器的硬件结构根据其基本的功能需求进行设计,如图1所示。
支持芯片正常工作的微控制器最小系统是整车控制器的核心,基础的信号处理模块,CAN通信与串口通信组成的通信接口模块,以及LCD显示等其他模块分别作为它的各大功能模块。
图1 整车控制器硬件结构图
(二)整车控制器硬件设计
从功能上可以把整车控制器分为6个模块。
1)微控制器模块:本设计选用美国德州仪器公司TI的数字信号处理芯片TMS320F2812为主控芯片,负责数据的运算及处理,控制方法的实现,是整车控制器的控制核心。
此芯片运算速度快,控制精度高的特点基本满足了整车控制器的设计需求。
TMS320F2812的最小系统主要由DSP主控芯片、晶振电路、电源电路以及复位电路组成。
2)辅助电源模块:由于整车控制器的控制系统中用到多种芯片,所以需要设计辅助电源电路为各个芯片提供电源,使其正常工作,因此输出电平有多种规格。
采用芯片LM317、LM337可分别产生+5V和-5V的供电电压。
3)信号调理模块:输入整车控制器的踏板信号是1~4.2V模拟电压信号,TMS320F2812的12位16通道的A/D采样模块输入的信号范围为0~3.0V,因此需要对踏板输入的模拟电压信号进行相应的调理运算,以满足DSP的A/D采样电平要求。
选用德州仪器的OPA4350轨至轨运算放大器,在输入级采用RC低通滤波电路与电压跟随电路以滤除干扰信号,减小输入的模拟信号失真。
开关信号先经RC低通滤波电路滤除高频干扰,再作为电压比较器LM393的正端输入,电压比较器的负端输入接分压电路,将LM393的输出引脚外接光耦芯片,在起到电平转换作用的同时,进一步隔离干扰信号,提高信号的安全性与可靠性。
4)通讯模块:TMS320F2812具有一个eCAN模块,支持CAN2.0B协议,可以实现CAN网络的通讯,但是其仅作为CAN控制器使用。
选用3.3V单电源供电运行的CAN发送接收器SN65HVD232D,其兼容TMS320F2812的引脚电平,用于数据速率高达1兆比特每秒(Mbps)的应
用。
依据ISO11898-2要求,在CAN总线CANH和CANL之间并联一个120Ω阻抗匹配电阻R29,以增加通信稳定性。
5)功率驱动模块:TMS320F2812输出的最高电压为3.3V,无法满足实际的汽车执行单元部件控制中对于大于等于5V驱动电压的要求。
采用八路NPN达林顿连接晶体设计的功率驱动芯片ULN2803A。
6)电平转换模块:TMS320F2812数据端口输出的高电平为3.3V,无法被5V供电的LCD19264液晶显示单元中的数据端口识别接收。
选用德州仪器公司生产的SN74LVC4245A对数据端口进行电平转换。
SN74LVC4245A是一个八位同相总线收发器,连续输出最大电流为
50mA,延时小于10ns,专用于数据总线之间的异步通信。
(三)整车控制器软件设计
整车控制器软件按照结构化、模块化思路进行设计,采用功能独立、各自分立的形式设计程序,相互影响小,有助于程序的调试与维护。
根据系统功能的实时性需求的不同,采用成熟的程序架构,对主控制程序和中断子服务程序进行任务分配,并将微控制器的软硬件中断功能进行充分利用。
对于能量管理、故障诊断等实时性需求不高的功能程序,将其分配到主程序中运行。
对于A/D采样、脉冲捕捉、
CAN通信等实时性要求较高且具有硬件驱动功能的程序,将其按照各自的频率分配到相应的中断程序中执行。
控制软件进入不同的运行模式及工作方式,是通过对行驶过程中复合电源纯电动汽车工况与模式进行判断来决定的。
软件运行控制的基础变量包括踏板开度信号、踏板开度变化率、电池SOC、超级电容SOC等信号,依次运行信号采集、处理CAN报文、处理故障、仪表显示等控制程序。
纯电动汽车控制系统具有较好的市场前景,并且有其一套完整的控制系统。
作为纯电动汽车控制系统的核心,整车控制器具有协调各个子系统的作用,在配合整车控制策略的同时可以更好地发挥其功能,从而使纯电动汽车能够正常行车。
本文当中介绍了整车控制器与外围系统的通迅网络,并以此大致搭建了整车控制器的整体硬件电路;在此基础上依据整车控制策略,合理设计了整车控制软件,并达到预计的效果。
参考文献:
[1]邢峰,杨慎,熊峰.复合电源纯电动汽车能量管理研究[J].内蒙古师范大学学报(自然科学汉文版),2018,47(06)
[2]张华清.纯电动汽车的整车布置[J].汽车工程师,2018(09)
[3]董伟.纯电动汽车整车控制策略研究[J].现代制造技术与装备,2018(07)。