卫星控制系统全物理仿真
基于前馈补偿的卫星姿态复合控制及物理仿真

为星 体所 受 的外干 扰力 矩 ;Bo 第J个 挠性 附件 的 转 为
动耦合系数;眚 为第 个挠性附件的结构阻尼矩阵 ;A 为第 个挠性附件的模态角频率矩 f 定义姿态角 = [ 0 T 】 O考虑轨道角速度影响的运动学方程如下 :
0 3 = C1 ) + C ) ) ( 2 ∞0 () 3
维普资讯
控
制
工
程
2 0 第 5期 0 6年
基 于前 馈 补 偿 的 卫星 姿 态 复 合控 制及 物 理 仿 真
王佐伟 刘一武 牟小刚
北京控 制 工程 研 究所
摘要 现代对地观测卫星往往带有大型活动式有效栽荷 ,有效栽荷 的运动
将 对 卫星的 姿态指 向精度 和 姿 态稳 定度 产 生严 重影响 。为 此需要 控制 系统克服
矩及其 它 因素的影 响 则 由解 耦 P D 控 制律 或 自抗 扰 控 制律 等反 馈措 施 加 以克 I 服 。姿 态信 号基 于 陀螺和 星敏 感 器组 合 定 姿 ,通 过 高精 度 姿 态确 定 算 法 获得 。 利 用单轴 气浮 台物 理仿 真试 验验证 了方案 的有 效性 。 关键 词 姿 态控 制 前 馈补偿 复 舍控 制 气浮 台 物理 仿 真
维普资讯
控
制 工
程
2 1
的设计中,考虑了前馈通道和反馈通 道的耦合问题。姿态信号基 于陀螺和星敏感器组合定 姿 ,通过高精度姿态确定算法获得。通过数学仿真和单轴气浮 台物理仿真试验 ,验证了方案
的有 效性 。
2 问题 描 述
考察 一类 带有 多个 活 动式有 效载 荷 和挠性 附件 的 轮控卫 星 的姿 态动 力 学数 学模 型 。假设
地观测 时需要 很 高的姿态 确定 精度 、姿态 控 制精度 和 姿态稳 定度 ,而 有效 载荷 本身 的扫 描运
挠性卫星高精度智能控制及物理仿真实验研究

}
‘ 3
() 4
选取 滑面 s  ̄+ 一是 + ,只要 是>0则可 保证 滑 面 稳定 。对 s =ke e 求导 ,令 ; ,得 到 等 价 的控 一0
制力 矩 :
T 一一 ( 朋 J一 2 | ) 一 + ( 忌 c J一 2 | ) , c 0
变 结构控 制选 择 为
究逐渐 达 到 了高 潮 ,其应 用也 越来 越广 泛I 6。 s ] -
本 文从 工程 实 用 的角度 出发 ,设计 了变 结构 与双 C MAC神 经 网络 复 合 智 能控 制 器 ,并 在 单轴 气浮 台全 物理仿 真 系统上 验证 了这 一控 制方 案 ,为其 进 一步 实际工 程应 用 的可行 性 提供 了依 据 。
2 控 制 律设 计
单轴 挠性 卫星 的姿 态动 力学 模 型为
J zo , + + c6一 T o
. .
1
() 1
+ + +c 一0 I
式 中 J为星 体 的转动惯 量 ,’ , 一[ ] 为太 阳翼 二 阶模 态 坐 标 , 一[ ,C ] G C 为耦 合 系 数 阵 , D—da (&c ,2 c) 帆板 的阻 尼阵 ,K=da ( } c ) 太 阳翼 的模 态 振 动 频率 阵 , T 为 飞 轮 ig 2 c c 为 . . z ig  ̄ , c 为 . ; c 控制 力 矩 , 为 参 数 摄 动 和 外 界 干 扰 的总 和 。 由于 挠 性 结 构 的低 阻 尼 特 性 , 板 振 动 成 为 影 响 本 翼
的条件 下具 有很 高 的指 向精 度 。因此 ,高精 度 姿控 系统 成为人 们 关注 和研 究的焦 点 之一 。
变结 构控 制 系统 ( c ) 被控 对象 的模 型误 差 、参数 的变 化 以及外 部 干扰有 极佳 的不 敏感 性 。 vs s 对 此外 ,它 还具 有 响应速 度快 、动 态性 能好 和实 现简 易等 优点 ,因而变 结构 控制 在卫 星 的姿态 控 制 中 取得 了成 功 的应用 [ ] 1 。然而要 实 现高精 度 控制不 仅 要克 服环境 干扰 ,还必须 消除 翼板 振 动 对星 体
EcosimPro多学科系统仿真工具
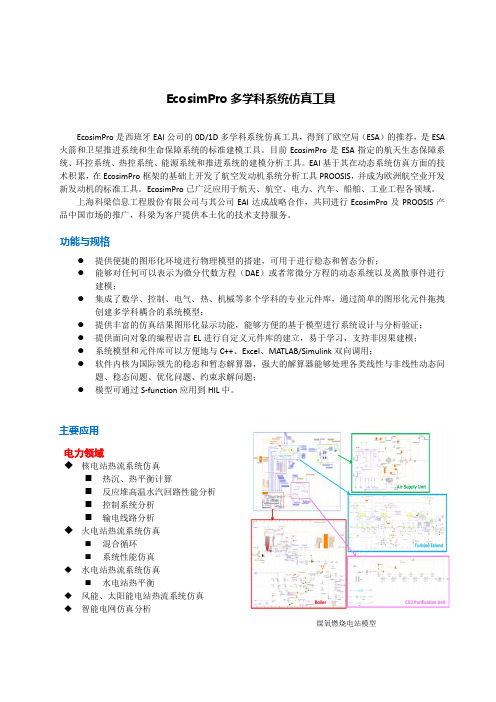
EcosimPro 多学科系统仿真工具主要应用EcosimPro 是西班牙EAI 公司的0D/1D 多学科系统仿真工具,得到了欧空局(ESA )的推荐,是ESA 火箭和卫星推进系统和生命保障系统的标准建模工具。
目前EcosimPro 是ESA 指定的航天生态保障系统、环控系统、热控系统、能源系统和推进系统的建模分析工具。
EAI 基于其在动态系统仿真方面的技术积累,在EcosimPro 框架的基础上开发了航空发动机系统分析工具PROOSIS ,并成为欧洲航空业开发新发动机的标准工具。
EcosimPro 已广泛应用于航天、航空、电力、汽车、船舶、工业工程各领域。
上海科梁信息工程股份有限公司与其公司EAI 达成战略合作,共同进行EcosimPro 及PROOSIS 产品中国市场的推广,科梁为客户提供本土化的技术支持服务。
电力领域◆核电站热流系统仿真 ⏹热沉、热平衡计算 ⏹反应堆高温水汽回路性能分析 ⏹控制系统分析 ⏹输电线路分析 ◆火电站热流系统仿真 ⏹混合循环 ⏹系统性能仿真 ◆水电站热流系统仿真 ⏹水电站热平衡◆风能、太阳能电站热流系统仿真 ◆智能电网仿真分析 功能与规格 ●提供便捷的图形化环境进行物理模型的搭建,可用于进行稳态和暂态分析;●能够对任何可以表示为微分代数方程(DAE )或者常微分方程的动态系统以及离散事件进行建模;●集成了数学、控制、电气、热、机械等多个学科的专业元件库,通过简单的图形化元件拖拽创建多学科耦合的系统模型;●提供丰富的仿真结果图形化显示功能,能够方便的基于模型进行系统设计与分析验证; ●提供面向对象的编程语言EL 进行自定义元件库的建立,易于学习,支持非因果建模; ●系统模型和元件库可以方便地与C++、Excel 、MATLAB/Simulink 双向调用;●软件内核为国际领先的稳态和暂态解算器,强大的解算器能够处理各类线性与非线性动态问题、稳态问题、优化问题、约束求解问题; ●模型可通过S-function 应用到HIL 中。
基于三轴气浮台的卫星姿态控制系统物理仿真

基于三轴气浮台的卫星姿态控制系统物理仿真刘超;何平;李岐;华楠【摘要】为了达到保证气浮平台安全性和协助重心调节系统的目标,设计了一套基于三轴气浮台的卫星姿态物理仿真的举升控制系统,实现了对气浮台安全性和方便性能的改善。
介绍了该举升控制系统的原理方案,对系统的总体结构进行了设计,以TMS320F2812为主控芯片设计了系统的硬件电路,其中主要包括各个模块的功能及系统的工作流程,进行了举升控制系统的软件算法设计。
实验结果表明,该系统能够满足控制要求,实现了对性能的改善,具有响应快、精度高、可靠性强等特点,功能和指标都达到了设计要求。
%In order to achieve the control goalof ensuring air-floating platform security and assisting gravity control system, the lifting control system of satellite attitude control system based on three-axis air-floating platform was designed to realize the improvement of the performance.Firstly, the principle and scheme of the lifting control system was presented. The overall structure of the system and the hardware circuit of the system was designed using TMS320F2812 as main control chip.It mainly consisted of the function of each moduleand the working process of the system.The software algorithm of the control system was presen-ted.With the experimental verification, the system met the control requirements and realized the improvement of the performance, and it also had advantages of fast response, high preci-sion and strong resistance to interference.The functions and indexes achieved the design re-quirements.【期刊名称】《哈尔滨商业大学学报(自然科学版)》【年(卷),期】2015(000)001【总页数】4页(P65-68)【关键词】气浮台;物理仿真;举升控制;DSP【作者】刘超;何平;李岐;华楠【作者单位】哈尔滨工业大学航天学院控制科学与工程系,哈尔滨150001;哈尔滨工业大学航天学院控制科学与工程系,哈尔滨150001;哈尔滨工业大学航天学院控制科学与工程系,哈尔滨150001;哈尔滨工业大学航天学院控制科学与工程系,哈尔滨150001【正文语种】中文【中图分类】TP294随着航天航空工程的不断深入发展,我国航天领域的科学技术迅猛进步,对姿态稳定指向或跟踪控制能力要求越来越高,系统功能更加复杂.作为空间飞行器全物理仿真的核心设备,气浮台的研究工作已经成为目前航天控制领域研究的重要方向[1].在国外,各研究单位和企业部门对于气浮台的研究是伴随着对于卫星的研制而开始的,目前发展比较成熟.而国内的基于气浮台的卫星全物理仿真的研究相比较国外而言起步晚,发展较慢,虽然说也取得了一定的成就,特别是近年来,气浮台的研制取得了长足的进步,但仍然有待改进,由于受技术条件限制,并没得到广泛的应用,因此仅用于航天工程领域的仿真试验中[2].本文基于TMS320F2812设计了基于三轴气浮台的卫星姿态仿真系统的举升控制系统,又称为安全辅助系统,以达到保证平台安全性和协助重心调平的目的.卫星全物理仿真的目的是提高卫星在轨运行的可靠性,减少卫星姿态失控的风险[3].为了平衡掉卫星姿态动力学对象的重力进而模拟太空环境,气浮台采用一个球面气浮轴承,提供三自由度微干扰力矩悬浮.气浮台的举升控制系统结构图如图1所示.从结构形式上看,举升控制系统分为:举升控制主板、电动执行器和无线通讯模块.其中,电动执行器由伺服电机驱动器和伺服电机组成.对于基于三轴气浮台的卫星姿态物理仿真系统,气浮平台在浮起的时候提供三个自由度,如有外力作用,或重心发生偏移,极有可能造成倒台,因此安全辅助子系统的作用显得尤其重要.举升控制系统电动立柱上的传感器获取力测量值,通过无线通讯模块将所得信息传递给电子控制器,在设定的控制算法的作用下,计算出合适的控制量来驱动电机,以达到精准控制气浮台升降的目标,并协助重心调节系统工作[4].系统主要由举升控制计算机、举升控制主板、电动执行器、无线通讯模块和限位开关五部分组成.系统的总体结构如图2所示.气浮台举升控制计算机,即上位机,是整个系统的监控平台,采用工控机来实现,为测试系统提供友好的人机交互界面,通过测量数据、分析数据和设定参数,得到举升台面的相应参数.气浮台举升控制主板,即下位机,是整个系统的控制核心,根据用户的给定命令值,结合各传感器反馈的数据,按照设定算法,发出相应的控制指令.举升控制系统的电动执行器推力可以克服最大可能重量偏心,当需要的时候,执行器动作,使平台归位,在正常工作时,处于收缩状态,平台在工作范围内自由转动.力传感器安装在执行器顶端,测量压力值,可以粗调系统的平衡,以及平台需要倾斜时,通过执行器伸长达到控制台面升降的目的.举升控制系统还包括限位机构,其中包括顶部限位和底部限位,作用是保护台架不至于翻滚.系统的控制电路结构框图如图3所示.3.1 系统主控制器单元采用德州仪器TI公司的TMS320F2812作为主控芯片,它具有强大的数字信号处理能力,片内集成了丰富的外设资源,为车身稳定控制系统的参数测量提供了极大的便利.考虑芯片的最小系统配置,该单元主要由以下几个模块组成:电源模块、JTAG模块、时钟模块、复位模块、晶振模块等[5].3.2 RAM存储器的扩展模块由于DSP主控芯片内部RAM容量有限,因此本主控系统对F2812进行了RAM存储器的片外扩展.本主控系统采用IS61LV12816作为片外RAM扩展芯片,它是一种高速的静态RAM,有17根地址总线,16根数据总线,其存储空间为, 由电源直接供电, 同时兼容TTL与CMOS电平,无时钟或刷新.3.3 伺服电机驱动模块伺服电机是指在伺服系统中控制机械元件运转的发动机,是一种变速装置.可使控制速度和位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象.其在自动控制系统中作为执行元件,具有机电时间常数小、线性度高等优点.选用安川电机制作所推出的小型交流伺服电动机和驱动器SGDV,采用位置控制的控制方式,输入信号为DSP主控芯片产生的指令脉冲,通过驱动器控制伺服电机运动,编码器采用增量式,即将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小,本系统采用的伺服电机起动转矩大,运行范围较广,无自转现象,特别适合于控制领域[6].3.4 通信单元主控系统的通信单元主要用于控制电路和计算机之间的通信.由于工作环境的需要,系统采用无线通信模块,台上台下无线实时通讯,方便主控系统与操作台进行数据交换,具有建设工程周期短、适应性好和扩展性好的优点[7].系统的控制电路的软件部分运行于TMS320F2812中,软件开发平台为CCS3.3.程序主要以C语言完成[8-9],CCS是德州仪器TI公司所设计的一款针对DSP的开发软件,本设计使用该编程开发环境下的CCS3.3版本对主控系统的开发.用户通过CCS3.3进行程序编写、在线编译、调试等,其工作流程图如图4所示.气浮台的举升控制作为安全辅助系统,保证了在正常工作和失控情况下平台的安全性.在平台初始状态下,举升控制系统提供方便,达到控制台面升降的目的.另外,重心调节系统与安全辅助系统建为一体,成功地辅助重心调节系统进行了重心的调整.本文设计的基于三轴气浮台的卫星姿态物理仿真的举升控制系统,运用DSP技术实现了保证平台安全性和协助重心调节系统工作的目标.实验结果表明,举升控制系统作为卫星姿态仿真系统中重要的一部分,能够快速地做出响应,经济实用,明显提高了控制系统的精度,在全物理卫星仿真中具有独特的作用,具有很高的实用价值,对于三轴气浮台的研究与发展具有非常重要的意义.【相关文献】[1] 刘良栋. 卫星控制系统仿真技术[M]. 北京:宇航出版社,2003. 56-58.[2] 鲁兴举. 空间飞行器姿态控制仿真试验平台系统研究与设计[D].北京:国防科学技术大学,2005. 17-21.[3] 陈欢龙, 周军, 刘莹莹, 等. 三轴气浮台多体动力学建模与仿真[J]. 西北工业大学学报,2010,26(3): 332-337.[4] 李延彬, 包刚, 王祖温, 等. 三自由度气浮台自动平衡系统动力学建模[J]. 中国惯性技术学报, 2005, 21(5): 1-3.[5] Texas Instruments Incorporated. TMS320C28X系列DSP的CPU与外设(上)[M]. 张卫宁译.北京:清华大学出版社, 2005. 12-30.[6] 史孝文. 基于DSP的直流伺服电机控制系统研究开发[D]. 昆明:昆明理工大学,2005.[7] 任明荣. 短距离无线通信技术及其融合发展研究[J]. 电测与仪表,2007,44(502):44-49.[8] 孙丽明. TMS320F2812原理及其C语言程序开发[M]. 北京: 清华大学出版社, 2008. 15-19.[9] 王纯.高超声速飞行器上升段轨迹设计[J].哈尔滨商业大学学报:自然科学版,2014,30(6):728-731.。
卫星姿轨控半物理仿真测试系统

0 引 言
控制分系统负责卫星变轨控制的实现,是卫星各分系统中 控制难度较大的一个分系统[1],如果该系统出现故障将直接 导 致卫星不能完成既定任务,甚至使其变成一个空间垃圾[2]。 卫 星在研制不同阶段对姿轨控的设计任务和试验验证任务要求不 同,因此地面仿真测时地面测试系统也应满足卫星不同阶段仿 真试验任务,使得能在卫星研制的不同阶段进行充分的仿真测 试验证以保证卫星在轨任务的成功。半物理仿真试验使用真实 的控制电路和星载姿轨控计算机软硬件、真实的敏感器及其接 口电路,用卫星 动 力 学 和 执 行 机 构 数 学 仿 真 软 件 驱 动 机 械 转 台,模拟卫星的姿态和轨道运动。为了保证某型号卫星姿轨控 分系统 (GNC) 顺利完 成 总 体 试 验 大 纲 规 定 的 开 环 测 试、 闭 环测试以及半物理仿真试验等功能,自动化测试是研制卫星姿 轨控分系统的重要手段[3],姿轨控分系统的半物理测试主要 是 实现系统的开闭环测试以及接口对接测试,除了半物理测试外
测试与故障诊断
计 算 机 测 量 与 控 制 .2017.25(11) 犆狅犿狆狌狋犲狉 犕犲犪狊狌狉犲犿犲狀狋 牔 犆狅狀狋狉狅犾
· 1 ·
文章编号:1671 4598(2017)11 0001 03 DOI:10.16526/j.cnki.11-4762/tp.2017.11.001 中图分类号:TP273 文献标识码:A
关键词:半物理仿真;通用性;高精度;星地联试
犚犲狊犲犪狉犮犺狅狀犛犪狋犲犾犾犻狋犲犃犗犆犛犛犲犿犻-犜犲狊狋犛犻犿狌犾犪狋犻狅狀犜犲狊狋犛狔狊狋犲犿
ZhangYiwen,LiuZhao,Chen Hang
(ShanghaiInstituteofSpaceflightControlTechnology,Shanghai 201109,China) 犃犫狊狋狉犪犮狋:InordertokeepthesatelliteAOCS (AttitudeTrajectoryControlSystem)semi-physicaltestsmoothly,thegroundtesting systemofAOCSsemi-physicalsimulationwasdesigned.Inordertomeettheuniversaltestofsimilarsatellitemodels,thesimulationtest systemadoptsageneralmodulardesighframework,.Asthesametime,thecurrentmainstreamPXIbustestingtechnologyisadoptedcoop eratingwithVPCswitchingcircuitboard.Thefunctionofeach moduleisrealizedbyusingstandardcPCIbuscardandsomehome-made FPGAprogrammablecPCIbuscard.Thisarchitecturecannotonlyrealizethefunction modularization,butalsofacilitatethesubsequent functionexpansionand maintenance. Meanwhile,theutility modelhastheadvantagesofhighreliability,fastconstructiontimeandstrong maintainability,andhastheadvantagesofsmallsizeandstrongstability,andcanbeadaptedtotestenvironmentconditionsofdifferenttest objects,andissuitableforlong-distancetransportation.Thispaperintroducestheoveralldesignstructureofthesystem,theoverallpow ersimulation,dynamicsimulator,electricalsourceinterface,programmingloadapplicationinterface,peripheralequipmentandotherhard warewereintroducedrespectively.Thetestsystemhasbeenverifiedbysatelliteandgroundtest.Thefunctionandusabilityofthetestsys tem havebeenverified.Thetestresultaccordswiththeconceptionofdesignfunctionandgeneralizationatthebeginningofthedesign. 犓犲狔狑狅狉犱狊:semi-simulation;universality;highprecision;satelliteandgroundjointtest
航天飞行器导航与控制系统设计与仿真
航天飞行器导航与控制系统设计与仿真导语:航天飞行器是现代科技的巅峰之作,它的导航与控制系统是其正常运行和控制的核心。
本文将探讨航天飞行器导航与控制系统的设计原理、关键技术以及仿真模拟的重要性。
一、航天飞行器导航与控制系统设计原理航天飞行器的导航与控制系统设计原理主要包括三个方面,即姿态控制、导航定位和轨迹规划。
1. 姿态控制:姿态控制是指通过控制飞行器的各种运动参数,使其保持稳定的飞行姿态。
对于航天飞行器来说,由于外部环境的复杂性和飞行任务的特殊性,姿态控制尤为重要。
常用的姿态控制方法包括PID控制、模型预测控制和自适应控制等。
2. 导航定位:导航定位是指通过测量飞行器的位置和速度等参数,确定其在空间中的位置。
现代航天飞行器的导航定位通常采用多传感器融合的方式,包括惯性导航系统、卫星定位系统和地面测控系统等。
其中,卫星导航系统如GPS、北斗系统等具有广泛应用。
3. 轨迹规划:轨迹规划是指根据航天飞行器的飞行任务和外部环境的要求,确定其飞行轨迹和航线。
航天飞行器的轨迹规划需要考虑多个因素,如飞行器的运动特性、飞行任务的要求、空间障碍物等。
二、航天飞行器导航与控制系统的关键技术航天飞行器导航与控制系统设计离不开一些关键技术的支撑,其中包括:1. 传感器技术:传感器技术是导航与控制系统的基础,可以通过传感器对飞行器的姿态、速度、位置等进行准确测量。
陀螺仪、加速度计、GPS接收机等传感器设备的精度和稳定性对导航与控制系统的性能有着重要影响。
2. 控制算法:姿态控制和导航定位需要高效的控制算法来实现。
PID控制算法是常用的姿态控制方法,模型预测控制和自适应控制等算法则在一些特殊应用中得到了广泛应用。
对于导航定位,卡尔曼滤波和粒子滤波等算法可以很好地利用多传感器信息进行位置估计。
3. 轨迹规划算法:航天飞行器的轨迹规划需要考虑多个因素,如安全性、能耗等。
基于遗传算法和优化算法的轨迹规划方法可以在不同的约束条件下求解最优解。
哈工大《飞行器设计综合实验》高桦实验一
一、实验题目卫星姿态控制物理仿真实验二、实验目的1、掌握飞行器姿态控制系统的光纤陀螺传感器和喷气执行机构、飞行器姿态模拟单轴气浮实验转台、数字信号处理器DSP控制器的功能、性能及应用方法;2、通过演示实验,掌握飞行器姿态控制物理仿真实验原理;3、掌握控制算法和DSP软件开发技术及用C语言在飞行器姿态控制物理仿真专业技术中的应用编程及实验方法。
三、实验任务1、以喷气装置作为执行机构,编写C语言,进行软件设计、编程和实验调试。
2、完成单轴陀螺定姿的转台闭环控制实验,进行姿态角机动20°的控制。
四、实验控制系统原理及框图图1 飞行器姿态控制实验转台系统框图单轴气浮实验转台控制系统原理主要是通过敏感器件(如陀螺,码盘等)测量转台姿态角及角速度等信息,通过DSP控制系统软件计算与理想(设定)状态的误差,并形成控制信息,操纵执行机构(如喷气装置,飞轮等),使转台回到设定位置。
五、控制算法及说明:喷气控制单回路姿态控制动力学方程为:dj T T J +=θ ,()00θθ=t ,()00θθ =t 式中,0θ、0θ 为姿态角、姿态角速度的初值,且00θθ =。
喷气推力器取为理想继电特性,并以线性姿态角θ作为反馈信号,当不计姿态角给定量(0=r θ)时,有控制方程0,0>-θj T()=t T j0,0<+θj T式中,0j T 为()t T j 的幅值。
系统的方框图如图2所示。
图2 喷气推理器取为理想继电特性的单回路姿态稳定系统方框图研究非线性控制系统常用的一种分析方法是相平面法,即在有姿态角θ和姿态角速度θ构成的直角坐标平面(相平面)上,研究θ与θ 间的运动轨迹(相轨迹),进而可获得关于系统过渡过程时间、超调量、极限环等主要姿控指标。
图3 理想喷气推理器的单回路姿态稳定系统的相轨迹图4 相平面法的DSP 实现原理图控制算法为0,≤+s U=U0,>-s U式中,U 为输出的控制量,f θ为角度预期值,M 为气浮转台的力矩,J 为气浮转台的转动惯量。
基于Simulink实时工具的小卫星姿控物理仿真
模 拟 星上 的光 学 敏 感 器 的 姿 态信 息 输 出 。执 行 部
件 主要 有框 架 控制 力矩 陀螺 、 力器 等 。姿态 控制 推
程 序 在 台上仿 真计算 机 中运 行 , 接收并 处 理敏感 器
信息 、 计算控制指令并发送。小卫星仿真 中的主要 工作 内容 如 下 l 4: _ J 3 _ a小卫 星 轨道环 境 分析 。 .
地 面验证 。
b 小卫 星姿 态建模 。 . 小 卫 星姿 态 一 般 以非 线 性 六 自由度 方 程来 描 述, 而特 殊情 况下 要考 虑挠 性 和液体 晃动 的影 响 。 e性能 分析 和系 统控 制方 案 的选 择 。 . 通 过仿真 可 以实现 系统 的控 制 , 括 明确小 卫 包 星控 制 系统所 要 达到 的控制 指标 、 用 的姿态测 量 采 敏感 器 的精度 需 求 及 组 合 形式 、 相应 的确 定 算 法 、 姿 态控 制 的算 法 、 行 机 构 的种类 、 矩精 度 和 角 执 力 动量 的容 限 、 制计 算 机 的 性 能 、 制 周期 的确 定 控 控 以及 控 制器稳 定性 分析 等 。
对于 中低 太 阳 同步近 圆轨道 的空间 环境 , 小卫 星将 受到 较 大的 气 动力 矩 、 剩磁 力 矩 、 力梯 度 力 重 矩 和 较小 的太 阳光 压 力 矩 。而 相 应 的 仿 真 实验 中 要 对 系统所 在 环境 的 干扰进 行评 估 和测 量 。
收 稿 日期 :0 1 6—1 2 1 —0 O
可表示 为 :
H =.o 1 t () 1
仿真控制 对象 是转 动 惯量 约 为 [0 12 . 2 . 1 6 2 .]g m ; 中俯仰轴为单轴气浮平 台模拟, 34 k ・ 2其 其
2024届湖南高考物理仿真模拟测试练习卷
2024届湖南高考物理仿真模拟测试练习卷一、单项选择题(本题包含8小题,每小题4分,共32分。
在每小题给出的四个选项中,只有一项是符合题目要求的)(共8题)第(1)题如图所示,卫星A是2022年8月20日我国成功发射的遥感三十五号04组卫星,卫星B是地球同步卫星,若它们均可视为绕地球做匀速圆周运动,卫星P是地球赤道上还未发射的卫星,下列说法正确的是( )A.卫星A的运行周期可能为48hB.卫星B在6h内转动的圆心角是45°C.卫星B的线速度小于卫星P随地球自转的线速度D.卫星B的向心加速度大于卫星P随地球自转的向心加速度第(2)题以下四种情景中产生正弦交变电流的是( )A.图甲中矩形线圈绕与匀强磁场方向垂直的中心轴沿顺时针方向转动B.图乙中矩形线圈的一半放在具有理想边界的匀强磁场中,线圈按图示方向绕轴线匀速转动C.图丙中圆柱形铁芯上沿轴线方向绕有矩形线圈,铁芯绕轴线以角速度转动D.图丁中矩形线圈绕与匀强磁场方向平行的中心轴转动第(3)题下列能量条形图表示了一作自由落体运动的物体在释放处和下落至一半高度处,其动能和重力势能的相对大小关系,可能正确的是()A.B.C.D.第(4)题2020年7月23日12时41分,长征五号遥四运载火箭托举着我国首次火星探测任务“天问一号”探测器,在中国文昌航天发射场成功发射天问一号探测器将在地火转移轨道飞行约7个月后,到达火星附近,通过“刹车”完成火星捕获,进入环火轨道,并择机开展着陆巡视等任务,进行火星科学探测。
下列说法正确的是( )A.“7月23日12时41分”指的是时间间隔B.“7个月”指的是时刻C.“天问一号”从地球到火星的位移大小就是其运行轨迹的长度D.研究“天问一号”探测器在地火转移轨道飞行的轨迹时可以将探测器看成质点第(5)题物理学的发展丰富了人类对物质世界的认识,推动了科学技术的创新和革命,促进了物质生产的繁荣与人类文明的进步,下列说法中正确的是()A.开普勒通过对行星观测记录的研究发现了万有引力定律B.伽利略指出物体的运动需要力来维持C.卡文迪许测出了引力常量G的数值D.牛顿运动定律是自然界普遍适用的基本规律之一第(6)题某滑雪赛道如图所示,滑雪运动员从静止开始沿斜面下滑,经圆弧滑道起跳。
一种提高卫星相对轨道运动全物理仿真逼真度的新方法
・
第3 7卷
第 5期
42 ・
Ae o p c n rla r s a e Co to nd App iai n l to c
21 0 1年 1 0月
C — ln ic lro b ti rpo e n t sp pe . O p a e cr ua r i s p o s d i hi a r
ae c
( B in ntueo o t l n ie i B rn . ei Istt fC nr gne n jg i oE r g, eig
1 0 9 , hi a;2. ce c n e h o o y o 0 1 0 C n S in e a d T c n lg n
种 提 高卫 星相 对 轨道 运 动 全 物 理 仿 真 逼 真 度 的 新 方 法
一
Ke ywo d S tlie’S ea ie r i r s: a elt rl t o bt v moi n: Ai— l — to rSl S
p n e l to m i l to e d d p af r s mu a i n
Itlg n o t l a oaoy, in 1 0, hn ) nel e tC nr b rtr Be ig 1 0 C ia i oL j 0 9
众所 周 知 , 星 控 制 系统 半 物 理 仿 真 由 于在 仿 卫
孙 承启 。 。
真 回路 中接人 了星上真 实部 件而 具有 比数 学仿 真高 的逼真度 . 在利用 三 轴 机械 伺 服 转 台的 卫 星 姿态 控 制系统 半 物理仿 真 中 , 服 转 台起 到 卫 星姿 态运 伺 动模 拟器 的作 用 . 常 把卫 星 姿 态 测 量 敏感 器 安 放 通 在伺 服转 台 上 , 服 转 台则 按 照 仿 真 计算 机 解 算 卫 伺 星 姿态 动力学 方程 得 到的解 实 时复现 卫星 的姿 态运 动, 控制力 矩 和空 间 环境 干 扰 力 矩 并 没有 真 正 作 用 在 转 台( 星 ) . 卫 上 因此 , 种 半 物 理 仿 真 实 验 从y 这 本
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引
言
卫星控制系统全物理仿真是指采用气浮台模拟 卫星本体作为控制对象, 其控制系统采用卫星控制 系统实物所进行的仿真试验。数学仿真、 半物理仿 真和全物理仿真都是卫星研制过程中的重要手段和 方法, 对于验证控制系统方案设计的正确性, 检验实 际控制系统的功能和性能十分重要。但全物理仿真 还具有其独特的作用。第一 , 全物理仿真不必用数
段。
星各轴具有相等的 转动惯量, 实现惯量的 11 : 的模
拟, 则执行机构的控制力矩矢量与实际卫星的相同; 在气浮台缩比模型试验时, 气浮台各轴与对应卫星 各轴的惯量比等于试验时执行机构与实际卫星执行 机构控制力矩之 比, 两者 的角加速度矢量相一致。 另外 , 卫星姿态敏感器也按要求安装在气浮台上, 与 地面 目标仿真器相配合 , 得到姿态角测量信号 , 则全 物理仿真就相当于卫星实际物理模型的飞行试验。 这样, 全物理仿真就可以在地面上更真实地模拟卫 星在空间的动力学、 动量交换、 动量藕合 , 从而及时 发现实际模型可能存在的问题。 卫星控制系统全物理仿真的用途大致分为五个
成。
仿真试验时基本技术指标应满足卫星型号仿真 要求。技术要 求有 : 1 空气轴承 承载 能力 大于 () 10 k;2 整体铸铝结构台体可装载约 80g 20g( ) 0k 的仿 真及技术系统部件 ; 3 台体加载后转动惯量 I () }
方面。
北京控制工程研究所利用挠性卫星单轴气浮台 全物理仿真系统, 基于变结构控制、 控制、 H二 自适 应控制、 分力合成控制等各种方法 , 成功地进行了挠 性结构卫星振动抑制和大角度机动控制试验, 取得 了很好的试验效果。
()液体晃动仿真研究 5 在星体 自旋情况下, 液体晃动引起的能量耗散 问题必须充分重视 , 否则将导致卫星姿态失控。尤 其是细长体卫星是绕其最小惯量轴转动的, 过度能
2 卫星控制系统全物理仿真的原理和
用途
气浮台依靠压缩空气在气浮轴承与轴承座之间 形成的气膜 , 使模拟台体浮起 , 从而实现近似无摩擦 的相对运动条件 , 以模拟卫星在外层空间所受干扰 力矩很小的力学环境。作为卫星运动仿真器 , 如采 用球面气浮轴承支持的三轴气浮台, 不但可模拟三 轴方向所需的姿态运动, 而且还能模拟卫星三轴动 力学祸合。与卫星控制系统半物理仿真相 比, 全物 理仿真不需要仿真计算机, 卫星动力学完全 由气浮 台来模拟, 控制系统采用部分或全部实物部件组成, 并置于气浮台上 , 组成与卫星控制系统相同的仿真 回路, 使用星上实际的控制规律, 实际的运行软件, 完成对气浮台的姿态控制。执行机构产生的控制力 矩直接作用在气浮台上, 如果气浮台各轴与对应卫
电源、 测控计算机及接 口、 干扰力矩发生器、 台上控 制盒、 太阳帆板驱动机构负载仿真器等 ; ( )地面支持设备 3 地面支持设备主要包括单轴气浮台、 目标仿真 器和地面测控系统。 a 单轴气浮台及技术指标 单轴气浮台是单通道全物理仿真系统的核心设 备, 由空气轴承、 台体 、 测角装置以及气源装置等组
P yi l l i fr t le nrl t h s a Smua o o S ei C t S s ms c i t n a lt o o y e
L Ju u oag hn J i g agn Zag jn i M X i s i ia n
B in Ist e C n o E g er g B in 10 8 e i ntu o ot l i ei , ei 0 0 0 j g i t f r n n n j g
天线伸展对章动的影响和天线对章动阻尼的作用 , 进行了自旋卫星章动仿真试验。通过仿真试验, 观 测天线伸展对章动的影响。结果表明: 利用鞭状短 波天线伸展减速的稳定方案是可行的。 ( )喷气作为执行机构的三轴稳定卫星动力学 2 仿真 对于用冷气推力器作为执行机构的三轴稳定卫 星, 需着重对喷气控制规律、 极限环和开关速度进行 仿真试验研究。气浮台仿真不但能够有效验证控制 方案, 还可得到仿真时的实际耗气量。利用单轴和 三轴气浮台进行卫星稳定运行段、 卫星人轨消除初 始偏差及返回前程序转弯段的系统仿真, 可以达到 验证控制系统设计正确与否的目的。 () 3 飞轮作为执行机构的三轴稳定卫星动力学 仿真 在卫星采用零动量反作用飞轮、 偏置动量轮或 框架动量轮作为执行机构时, 由于飞轮产生的控制 力矩直接作用在气浮台上, 通过气浮台仿真, 对于验 证轮控系统方案的正确性 , 发现模型上存在的问题 直观有效, 而且特别适合于对轮子转速过零 、 轮子动 摩擦力矩、 轮子动量卸载等问题的研究。 ( )挠性结构卫星动力学仿真试验研究 4 大多数现代卫星在结构上的一个特点是在刚体 卫星主体上安装了带有诸如大面积太阳帆板、 大型 天线等挠性结构。挠性结构具有结构大, 刚度低, 阻 尼弱的特点。由于这类卫星需要很高的姿态控制精 度, 这就要求开展针对挠性结构卫星的控制理论和 试验研究 , 出动力学建 模、 提 验模 的方法及 其手
万方数据
第2 2卷 第 2 期
李季苏等 : 卫星控制系统全物理仿真
・3 ・ 9
与卫星刚体运动相互藕合并影响星体稳定性的是与 章动角发散有关的时间常数。气浮台仿真对液体晃
动的能量耗散及发散时间常数 的试验研究提供 了手
段。
3 全物理仿真系统的组成 , 主要设备
的技术指标
卫星控制系统全物理仿真主要分为单通道和三 通道两种。单通道全物理仿真选用单轴气浮台作为 运动仿真器 , 三通道全物理仿真选用三轴气浮 台作 为运动仿真器。 无论是单轴还是三轴气浮 台仿真系统 , 系统 从 配置上讲 , 均按台上仿真控制系统 、 台上技术系统以
万方数据
航
天
控
制
20 0 4年
制方案, 为各种控制方法的实际应用创造条件。 采用各种飞轮组合或框架动量轮组合控制方案 的大型中、 低轨道卫星特别适合进行全物理仿真试 验。由于缺乏这类卫星的空间飞行数据 , 加上个别 设计者在设计上的某些疏漏 , 可能造成系统或部件 模型上的实际偏差, 因而在卫星的研制中, 为验证控 制系统方案设计的正确性 , 提高卫星在轨运行的可 靠性 , 减少卫星失控风险 , 对系统进行全物理仿真试 验就非常必要。在卫星研制初期或确定一个新的控 制系统方案时, 气浮台仿真试验具有特别重要的意 义, 它是方案论证和功能验证不可缺少的工具。
量耗散会引起章动角增大 , 使卫星进入绕最大惯量 轴转动的状态。
( ) 旋稳定卫星动力学仿真 1自 46 年初为确定“ 98 东方红一号”卫星鞭状短波
液体晃动动力学方程非常复杂 , 充液机构也很 复杂, 晃动不但和液体粘滞性有关, 而且产生压力波
动, 其干扰力矩会改变星体的运动。反映液体晃动
A s at iu tn rer m t d otg iry o ad a g a raosi, s g bt c m li ia a h h a p n s l i t r n a l i l tn p u n r S ao s e c e o d i i a t h y n o c e i h s m e l i m dl ed r l t . cn c s d m t m ta s u tn d yi l u t n oe i t o e s e I a b l s a ah ai l l i a p sa s l i . n a f y m t e 彝 s a s a s e c i a o n h c i a o m m Pycl u tn s tv i t ds n otl e i t p cs a le ep et B- hsas li iu d e y eg oc r s t n r e osei dvom n e i i ao s o f h i f o y m h o s f l e l m e r e n s e tt . cu a - ai t lit dnmc u t , hsa s u tn l cld - ai t ls u as ib rg e h ya is lo pyi l l i ia o l a b rg e - e e n a s r b e i ar m c i a o s ae i e n a i m s r b m li . s epen pi ie apctn hsa s u tn s ei ’ c tl es ao TiPpr et rclad lao opycl li fr le£ o r s t . tn h a r s p n p i i f i i ao o a l s n m tt no y m s Tippr lir ueto sa s u tn t s ui s t cn itn thi l h aebey o c w pyi l li s e i l n y e ost i ad n apr s r n d s h c i ao y m n d g m tuo n e c e i f t m s c s c - frac o t ipiay is A t sm t e ts epoi s rl sa s u t n m l om ne h r r dve t a e ,h ppr v es e pyi l l i ea pe f r e m ec . h e i m i a r d e a h c i ao x v m s fr le tl es o s ei c r s t . al o oym tt n s
收稿日期 20 年 1 月 1 03 1 2日
学模型来代替控制系统和控制对象 ( 卫星本体 ) 的 动力学; 系统实物直接参与对气浮台的控制 , 因此可 有效发现控制系统设计和某些部件实际模型存在的 问题。第二 , 全物理仿真避免了系统 中某些实物部 件难于建立精确数学模型的困难。由于将这些部件 直接接人回路, 这些部件对控制系统性能的影响就 被直观而有效地反映在仿真试验的结果中。第三, 全物理仿真是进行大型挠性太阳帆板、 天线附件等 多体卫星动力学单通道试验研究和 自旋卫星液体晃 动缩 比模型试验研究 的重要方法 , 能够有效验证控