论述监督分类与非监督分类却别与联系,及各自优缺点
机器学习知识:监督学习与非监督学习
机器学习知识:监督学习与非监督学习人工智能(AI)是近年来最热门的话题之一。
而机器学习是AI中重要的一环,它提供了一种让计算机从数据中学习的方法,而无需进行显式的编程。
机器学习有两种主要类型:监督学习和非监督学习。
本文将探讨这两种类型与它们的应用。
监督学习监督学习是指给机器学习算法提供已知的输入和输出数据,让计算机通过这些数据来学习。
监督学习的目的是基于训练数据集建立一个模型,以实现对新数据的预测和分类。
监督学习中最常见的算法有决策树、朴素贝叶斯、支持向量机(SVM)和神经网络等。
决策树是一种树形结构模型,可以对数据进行层层分割,得到最终的分类。
它可以以易于理解的方式将数据集分为不同的成分。
朴素贝叶斯是一种基于贝叶斯定理的概率分类算法,用于分析大量的数据并进行有效的预测。
基于这种算法可以对新的和未知的数据进行分类。
SVM是一种有监督学习算法,用于分类和预测数据。
它是一种非常强大的算法,可以处理大量的数据,例如文本和图像。
SVM被广泛应用于图像、文本、语音和语言等领域。
神经网络是一种模拟人类大脑和神经系统的算法。
它通过在一系列处理单元之间传递信息和模拟神经元之间的连接来实现分类。
神经网络是一个非常强大的算法,可以用于各种应用,包括图像和语音识别、自然语言处理和金融预测。
监督学习的一个重要应用是图像分类。
通过监督学习,可以让机器学习算法自动地从大量的图像中学习到不同类型的图像并将其分类。
例如,训练一个模型可以识别猫或狗的图片,如果输入未知的图片,该算法可以自动判断输入图片是猫还是狗。
这种应用在医学图像、自然景观图像和工业图像等领域都得到了广泛应用。
非监督学习非监督学习是指算法对未标注数据进行学习。
与监督学习不同,非监督学习没有先前设定的输出。
目标是将数据分组到不同的类别中,以发现内在的模式。
非监督学习的最常用算法有聚类和降维。
聚类是一种将数据点分组到不同簇的技术。
这些簇代表了数据集中相似的数据点。
几个常用的聚类算法包括K-means和层次聚类。
有监督学习与无监督学习的区别

有监督学习与⽆监督学习的区别
有监督学习和⽆监督学习两者的区别:
1.有标签就是有监督学习,没有标签就是⽆监督学习,说的详细⼀点,有监督学习的⽬的是在训练集中找规律,然后对测试数据运⽤这种规律,⽽⽆监督学习没有训练集,只有⼀组数据,在该组数据集内寻找规律。
2. ⽆监督学习⽅法在寻找数据集中的规律性,这种规律性并不⼀定要达到划分数据集的⽬的,也就是说不⼀定要“分类”。
⽐如,⼀组颜⾊各异的积⽊,它可以按形状为维度来分类,也可以按颜⾊为维度来分类。
(这⼀点⽐监督学习⽅法的⽤途要⼴。
如分析⼀堆数据的主分量,或分析数据集有什么特点都可以归于⽆监督学习⽅法的范畴) ,⽽有监督学习则是通过已经有的有标签的数据集去训练得到⼀个最优模型,像我们的CNN(卷积神经⽹络)模型都是运⽤了有监督学习去训练出最优的模型,利⽤这个最优的模型就可以对⼀些图像进⾏场景分类。
3.有监督学习要实现的⽬标是“对于输⼊数据X能预测变量Y”(有答案和⽅法的学)。
⽽⽆监督学习要回答的问题是“从数据X 中能发现什么”(⾃学)。
深度学习中的监督学习/⽆监督学习算法:
深度学习是⼀种实现机器学习的技术,也包含了监督学习算法和⽆监督学习算法。
常见的卷积神经⽹络就是⼀种有监督学习⽅法,在图像分类(如⼈脸识别)上应⽤⾮常⼴泛。
⽣成对抗⽹络(GAN)是⼀种⽆监督学习⽅法,经常被⽤来做图像⽣成(如深度卷积对抗⽣成⽹络(DCGAN)可⽤于⽣成卡通图像)。
监督与非监督的异同

minimum distance
优点 不存在不分类的像素;计算量小;只用均 值一个参数,就避免了在样本数较少的情况下, 协方差矩阵计算不准确而引起的误差。 缺点 分类精度不高,没有考虑到类型的变化性, 可能误分对于内部变化较小的类型如水体,就可 能分类象素过多,即把本不属于这类的象素归入 这类.
最 小 距 离 分 类
原理 各像元点划归到距离它最近的类别中心 所在的类。 过程 ① 确定地区和波段,配准备分量;② 选 择 训练区;③ 根据各训练区图像数据,计算 M ;④ 将训练区外图像像元逐类代入上式,按判 别规则比较大小,得到类别;⑤ 产生分类图像; ⑥ 检验结果,如果错误较多需要重新训练区;⑦ 输出专题图像.
非监督分类
算 法
原理 它从样本平均迭代来确定聚类的中心, 在每一次迭代时,在不改变类别数目的前提下 改变分类。然后将样本平均矢量之差小于某一 指定阈值的类别对合并起来,或根据样本协方 差矩阵来决定其分裂与否。 主要环节 聚类、集群分裂和集群合并 分类过程 ①初始随机的选择中心Cmax; ②计算其他像元离这些中心的距离,按照最小 距离规则划分到其对应的集群中 ③重新计算每 个集群的均值,按照前面定义的参数合并或分 开集群组; ④重复②和③ ,直到达到最大不 变像元百分比,或者最长运转时间。 优点 聚类过程不会在空间上偏向数据文件 的最顶或最底下的象素 缺点 费时
非监督分类 聚类分析、点群分析 没有类别先验知识
是否需要 训练样本 依据
仅需极少的人工初始输入 根据地物的光谱特征及空间特征的相关性 或相似性进行分类 动态聚类,选择一些代表点作为聚类的核 心,,然后将其余待分点按某种方法(判 据准则)分到各类中去,完成初始分类, 之后再重新计算各聚类中心,把各点按初 始分类判据重新分到各类,完成第一次迭 代.然后修改聚类中心进行下一次迭代, 对上次分类结果进行修改,如此反复直到 满意为止.
论述监督分类与非监督分类却别与联系,及各自优缺点

论述监督分类与非监督分类却别与联系;及各自优缺点监督分类:首先需要从研究区域选取有代表性的训练场地作为样本..根据已知训练区提供的样本;通过选择特征参数如像素亮度均值、方差等;建立判别函数;据此对样本像元进行分类;依据样本类别的特征来识别非样本像元的归属类别..非监督分类:在没有先验类别作为样本的条件下;根据像元间相似度大小进行计算机自动判别归类;无须人为干预;分类后需确定地面类别..区别与联系:根本区别在于是否利用训练场地来获取先验的类别知识..非监督分类不需要更多的先验知识;据地物的光谱统计特性进行分类..当两地物类型对应的光谱特征差异很小时;分类效果不如监督分类效果好..⏹监督分类常常用于对分类区比较了解情况下;要求用户控制.⏹1选择可以识别或可以断定其类型的像元建立模板;然后基于该模板使系统自动识别具有相同特征的像元.⏹2对分类结果进行评价后再对模板进行修改;多次反复后建立比较正确的模板;在此基础上最终进行分类.各自优缺点:监督分类的特点:主要优点:可充分利用分类地区的先验知识;预先确定分类的类别;可控制训练样本的选择;并可通过反复检验训练样本;以提高分类精度避免分类中的严重错误;可避免非监督分类中对光谱集群组的重新归类..主要缺点:人为主观因素较强;训练样本的选取和评估需花费较多的人力、时间;只能识别训练样本中所定义的类别;对于因训练者不知或因数量太少未被定义的类别;监督分类不能识别;从而影响分结果对土地覆盖类型复杂的地区需特别注意..非监督分类特点:主要优点:无需对分类区域有广泛地了解;仅需一定的知识来解释分类出的集群组;人为误差的机会减少;需输入的初始参数较少往往仅需给出所要分出的集群数量、计算迭代次数、分类误差的阈值等;可以形成范围很小但具有独特光谱特征的集群;所分的类别比监督分类的类别更均质;独特的、覆盖量小的类别均能够被识别..主要缺点:对其结果需进行大量分析及后处理;才能得到可靠分类结果;分类出的集群与地类间;或对应、或不对应;加上普遍存在的“同物异谱”及“异物同谱”现象;使集群组与类别的匹配难度大;因各类别光谱特征随时间、地形等变化;则不同图像间的光谱集群组无法保持其连续性;难以对比..。
监督与非监督的异同
非监督分类 聚类分析、点群分析 没有类别先验知识
是否需要 训练样本 依据
仅需极少的人工初始输入 根据地物的光谱特征及空间特征的相关性 或相似性进行分类 动态聚类,选择一些代表点作为聚类的核 心,,然后将其余待分点按某种方法(判 据准则)分到各类中去,完成初始分类, 之后再重新计算各聚类中心,把各点按初 始分类判据重新分到各类,完成第一次迭 代.然后修改聚类中心进行下一次迭代, 对上次分类结果进行修改,如此反复直到 满意为止.
监督分类非监督分类别名训练分类聚类分析点群分析适用范围有先验知识已知训练场地的类别实地抽样调查人工目视判读没有类别先验知识是否需要训练样本人工选取训练样本仅需极少的人工初始输入依据根据训练样本的光谱特征找出相似地物进行分类根据地物的光谱特征及空间特征的相关性或相似性进行分类分类原理分析者在图像上对每一种类别选取一定数量的训练区通过计算将每个像元和训练样本作比较按照不同规则划分到和其最相似的样本动态聚类选择一些代表点作为聚类的核心然后将其余待分点按某种方法判据准则分到各类中去完成初始分类之后再重新计算各聚类中心把各点按初始分类判据重新分到各类完成第一次迭代
监督
又称训练分类法,即用被确认类别的样本像元 去识别其他未知类别像元的过程.
非监督
也称为聚类分析或点群分析。即在多光谱图像 中搜寻、定义其自然相似光谱集群组的过程。
那监督与非监 督到底有什么 不同呢?
监督分类 别名 适用范围 训练分类 有先验知识,已知训练场地 的类别(实地抽样调查、人 工目视判读) 人工选取训练样本 根据训练样本的光谱特征找 出相似地物,进行分类 分析者在图像上对每一种类 别选取一定数量的训练区, 通过计算,将每个像元和训 练样本作比较,按照不同规 则划分到和其最相似的样本 类
实习8、监督分类与非监督分类

操作方法及过程1. 选取研究区数据(512×512),通过目视解译建立分类系统及其编码体系根据实习要求,在遥感影像上确定并提取出了12种地物,分别是居民点、砾石、道路、河流、水稻田、水浇地、水库、裸地、工业区、滩地、林地。
同时确定土地的覆盖类型、编码以及色调。
居民点Town 砾石gravel desert道路Road 水稻田paddy land水浇地irrigat ed land 水库reservoi r裸地barrenl and 工业区industri al area滩地shoalyland 林地forest草地grassla nd河流stream2. 按照监督分类的步骤,在影像上找出对应各个土地利用/覆盖类型的参考图斑,利用ROI工具建立训练区,给出各个类别的特征统计表。
加载512*512影像,右击Image窗体,选择ROI Tool,进行ROI采集,在Zoom中选择样本区,根据地物的情况选择poin t、polylin e、polygon方式建立训练区。
3. 计算各个样本之间的可分离性。
说明哪些地物类型之间较易区分,哪些类型之间难以区分。
ROI Tool中选O p tions的统计训练区可分性Com pute ROI Separab ility,选择中卫影像,点击确定,选择所有训练区,统计J—M距离和分散度。
4. 监督分类:利用最大似然法完成分类。
①具体步骤:Classifi catio n|Supervi sed| Maximum Likelih ood,在Set Input File对话框中导入影像。
在打开的对话框中选Sele ct All Items,其中Set Probabi lity Threshol d设为NO,Output R ule Image设为N o,选择保存路径。
子情境4遥感图像分类—习题答案.
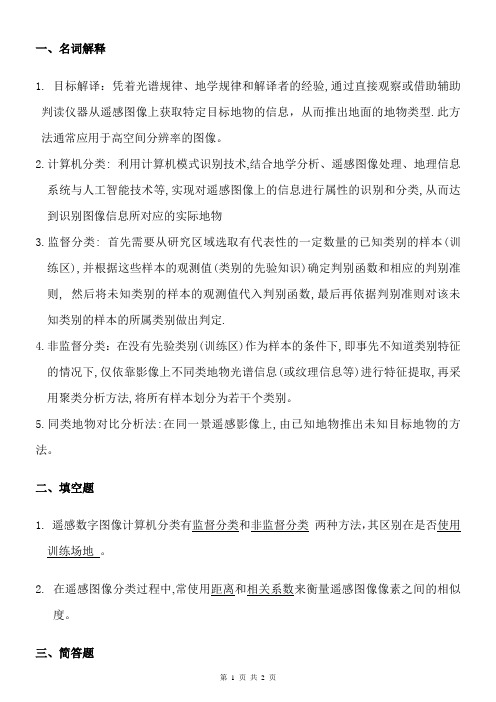
一、名词解释1. 目标解译:凭着光谱规律、地学规律和解译者的经验,通过直接观察或借助辅助判读仪器从遥感图像上获取特定目标地物的信息,从而推出地面的地物类型.此方法通常应用于高空间分辨率的图像。
2.计算机分类: 利用计算机模式识别技术,结合地学分析、遥感图像处理、地理信息系统与人工智能技术等,实现对遥感图像上的信息进行属性的识别和分类,从而达到识别图像信息所对应的实际地物3.监督分类: 首先需要从研究区域选取有代表性的一定数量的已知类别的样本(训练区),并根据这些样本的观测值(类别的先验知识)确定判别函数和相应的判别准则, 然后将未知类别的样本的观测值代入判别函数,最后再依据判别准则对该未知类别的样本的所属类别做出判定.4.非监督分类:在没有先验类别(训练区)作为样本的条件下,即事先不知道类别特征的情况下,仅依靠影像上不同类地物光谱信息(或纹理信息等)进行特征提取,再采用聚类分析方法,将所有样本划分为若干个类别。
5.同类地物对比分析法:在同一景遥感影像上,由已知地物推出未知目标地物的方法。
二、填空题1.遥感数字图像计算机分类有监督分类和非监督分类两种方法,其区别在是否使用训练场地。
2. 在遥感图像分类过程中,常使用距离和相关系数来衡量遥感图像像素之间的相似度。
三、简答题1、比较监督分类与非监督分类的优缺点?根本区别在于是否利用训练场地来获取先验的类别知识,监督分类是根据样本选择特征参数,所以训练场地要求有代表性,样本数目要满足分类的要求,有时这些不容易做到;非监督分类不需要更多的先验知识,他根据地物的光谱统计特征进行分类,所以非监督分类方法简单,且具有一定的精度。
2、影响遥感图像分类精度的因素有哪些?计算机分类的精度和可靠性与分类方法本身的优劣有关,一般说来,最大似然法的分类精度要优于最小距离法、平等多面体法等,而神经网络法、分类树法、模糊分类法又能在一些特定情况下进一步提高分类精度。
除分类方法之外,分类精度还取决于一些其它的因素:(1)训练场地和训练样本的选择问题;(2)地形因素的影响;(3)混合像元问题;(4)分类变量的选择问题;(5)空间信息在分类中的应用问题;(6)图像分类的后期处理问题。
监督学习,无监督学习,半监督学习区别

监督学习,⽆监督学习,半监督学习区别
监督学习:
监督学习是⽬前最主流的学习⽅式,其特点是:训练过程中样本都是有标签的。
常见的监督学习任务有:分类、回归、序列标注等。
学习步骤⼤致可以分为三步(以SVM为例):
1) 在有监督数据上训练,学的⼀个判别器W;
2)然后在测试集(故意把标签P抹去)上,⽤上⼀步学的判别器W进⾏分类任务,得到⼀个预测标签PY
3) PY和P的差距,就是衡量算法好坏的标准。
⽆监督学习:
特点是:训练过程中没有样本标签。
常见的任务:聚类、降维等
常⽤算法:k-means、谱聚类等
步骤:
1)直接在全部数据上训练,得到预测标签PY
2) 之后将PY和真实标签Y进⾏对⽐,⽤的是经典的匈⽛利算法。
注意:这⾥的PY和Y并不是⼀⼀对应关系,⽽是看“类内样本”对应关系,这也是聚类指标和分类指标不同之处。
举个例⼦:样本A和样本B真实标签是“1”
经过聚类算法处理后,得到了预测标签。
若A、B标签相同,则代表这两个样本分对了(标签可能是“1”,也可能是“2”、“3”、“4”、、、) 若聚类后,A和B的标签不同,则代表这两个样本分错了(分成不同类了)。
半监督学习:
特点是:训练过程中,⽤的是全部的样本数据(和监督的区别,监督是认为的把数据划分为有标签和⽆标签),但是这些样本中只有⼀⼩部分有标签,⼤部分是没有标签的。
其原理是通过标签传播的⽅式,利⽤已有标签的样本信息去预测未知标签样本的类别信息。
典型⽅法:S3VM、S4VM、CS4VM、TSVM;。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
论述监督分类与非监督分类却别与联系,及各自优缺点
监督分类:首先需要从研究区域选取有代表性的训练场地作为样本。
根据已知训练区提供的样本,通过选择特征参数(如像素亮度均值、方差等),建立判别函数,据此对样本像元进行分类,依据样本类别的特征来识别非样本像元的归属类别。
非监督分类:在没有先验类别作为样本的条件下,根据像元间相似度大小进行计算机自动判别归类,无须人为干预,分类后需确定地面类别。
区别与联系:
根本区别在于是否利用训练场地来获取先验的类别知识。
非监督分类不需要更多的先验知识,据地物的光谱统计特性进行分类。
当两地物类型对应的光谱特征差异很小时,分类效果不如监督分类效果好。
监督分类常常用于对分类区比较了解情况下,要求用户控制.
1)选择可以识别或可以断定其类型的像元建立模板,然后基于该模板使系统自动识别具有相同特征的像元.
2)对分类结果进行评价后再对模板进行修改,多次反复后建立比较正确的模板,在此基础上最终进行分类.
各自优缺点:
监督分类的特点:
主要优点:可充分利用分类地区的先验知识,预先确定分类的类别;可控制训练样本的选择,并可通过反复检验训练样本,以提高分类精度(避免分类中的严重错误);可避免非监督分类中对光谱集群组的重新归类。
主要缺点:人为主观因素较强;训练样本的选取和评估需花费较多的人力、时间;只能识别训练样本中所定义的类别,对于因训练者不知或因数量太少未被定义的类别,监督分类不能识别,从而影响分结果(对土地覆盖类型复杂的地区需特别注意)。
非监督分类特点:
主要优点:无需对分类区域有广泛地了解,仅需一定的知识来解释分类出的集群组;人为误差的机会减少,需输入的初始参数较少(往往仅需给出所要分出的集群数量、计算迭代次数、分类误差的阈值等);可以形成范围很小但具有独特光谱特征的集群,所分的类别比监督分类的类别更均质;独特的、覆盖量小的类别均能够被识别。
主要缺点:对其结果需进行大量分析及后处理,才能得到可靠分类结果;分类出的集群与地类间,或对应、或不对应,加上普遍存在的“同物异谱”及“异物同谱”现象,使集群组与类别的匹配难度大;因各类别光谱特征随时间、地形等变化,则不同图像间的光谱集群组无法保持其连续性,难以对比。