基于simulink的模糊控制仿真
基于SIMULINK磁流变阻尼结构模糊控制器的仿真
基于SIMULINK 磁流变阻尼结构模糊控制器的仿真引 言磁流变减振器是一种阻尼可控器件,其工作原理是调节励磁线圈中的电流获得不同强度的磁场,使阻尼通道中磁流变液的流动特性发生变化,从而改变减振器的阻尼力。
磁流变减振器具有调节范围宽、功耗低、响应速度快、结构简单等特点,在汽车、建筑、航空航天等领域具有应用广阔前景。
本文采用模糊控制器实现磁流变阻尼器在振动过程中电流参数的选择。
此外, 在模糊控制器的设计中,隶属函数和模糊规则的确定对系统的减震控制效果有着显著影响,为此本文对采用不同隶属函数和模糊规则的模糊控制器进行了比较分析,并对一加有磁流变阻尼器的5层建筑结构进行实例仿真分析。
1. 磁流变阻尼器的力学模型Bingham 模型是磁流变阻尼器常采用的力学模型之一,其应力和应变的关系为:sgn()y ττηγ=⋅+ (1)式中,τ为磁流变液的剪应力;γ 为剪切应变速率;y τ为由磁场引起的剪切屈服应力(是电流的函数);η为流体的动力粘度;sgn()⋅为符号函数。
根据Bing-ham 流体在窄缝中流动的压力梯度方程,可得磁流变阻尼器力学分析模型:2d 3123()sgn(())py P LA L F x t A xt Dh h ητπ=+ (2) 式中,,L 为活塞的有效长度;D 为缸体的内径;d 为活塞轴直径;h 为活塞与缸体间的间隙;()xt 为活塞与缸体间的相对运动速度;P A 为活塞的有效面积22()4P A D d π=-;η为磁流变液的表观粘度系数。
由于剪切屈服应力y τ与磁场强度有关,所以y τ是控制电流的函数。
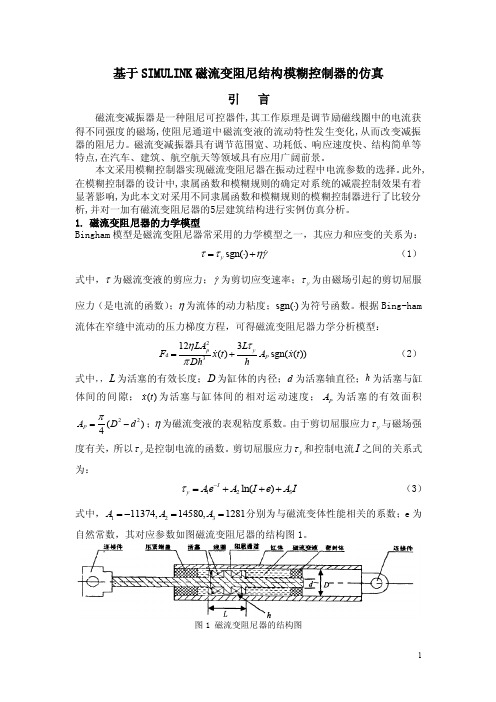
剪切屈服应力y τ和控制电流I 之间的关系式为:123ln()I y Ae A I e A I τ-=+++ (3) 式中,12311374,14580,1281A A A =-==分别为与磁流变体性能相关的系数;e 为自然常数,其对应参数如图磁流变阻尼器的结构图1。
图1 磁流变阻尼器的结构图从磁流变阻尼器的力学模型可以看出,影响磁流变阻尼器输出力的主要因素有:磁流变液的最大屈服强度、体积流量(与缸体内径和活塞杆直径有关)、导磁区长度及导磁区内活塞与缸体间隙的宽度。
基于simulink的模糊PID控制例子
1模糊P1D用命令FUZZy翻开模糊控制工具箱。
AnfiSedit翻开自适应神经模糊控制器,它用给定的输入输出数据建个一个模糊推理系统,并用一个反向传播或者与最小二乘法结合的来完成隶属函数的调节。
SUrfVieW(newfis)可以翻开外表视图窗口8.1模糊PID串联型新建一个SimUIink模型同时拖入一个fuzzy1ogiccontro11er模块,双击输入已经保存的fis模糊控制器的名字。
由于这个控制模块只有一个输入端口,需要用到I I1UX模块。
模糊结合PID,当输出误差较大时,用模糊校正,当较小时,用PID校正。
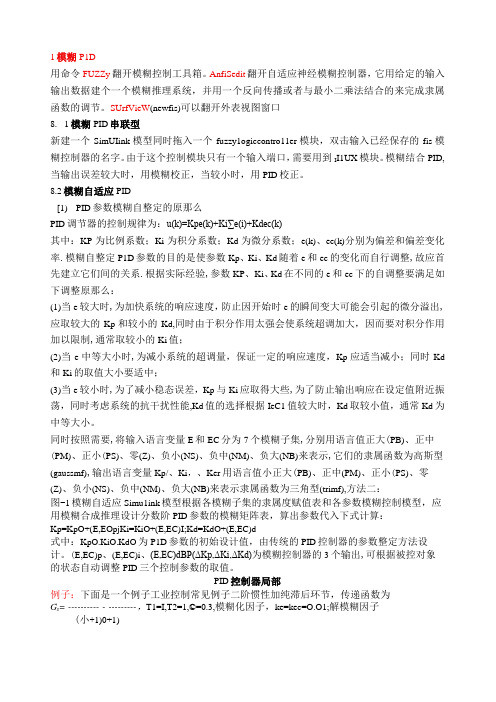
8.2模糊自适应PID[1)PID参数模糊自整定的原那么PID调节器的控制规律为:u(k)=Kpe(k)+Ki∑e(i)+Kdec(k)其中:KP为比例系数;Ki为积分系数;Kd为微分系数;e(k)、ec(k)分别为偏差和偏差变化率.模糊自整定P1D参数的目的是使参数Kp、Ki、Kd随着e和ec的变化而自行调整,故应首先建立它们间的关系.根据实际经验,参数KP、Ki、Kd在不同的e和ec下的自调整要满足如下调整原那么:(1)当e较大时,为加快系统的响应速度,防止因开始时e的瞬间变大可能会引起的微分溢出,应取较大的Kp和较小的Kd,同时由于积分作用太强会使系统超调加大,因而要对积分作用加以限制,通常取较小的Ki值;(2)当e中等大小时,为减小系统的超调量,保证一定的响应速度,Kp应适当减小;同时Kd 和Ki的取值大小要适中;(3)当e较小时,为了减小稳态误差,Kp与Ki应取得大些,为了防止输出响应在设定值附近振荡,同时考虑系统的抗干扰性能,Kd值的选择根据IeC1值较大时,Kd取较小值,通常Kd为中等大小。
同时按照需要,将输入语言变量E和EC分为7个模糊子集,分别用语言值正大(PB)、正中(PM)、正小(PS)、零(Z)、负小(NS)、负中(NM)、负大(NB)来表示,它们的隶属函数为高斯型(gaussmf),输出语言变量Kp/、Ki,、Ker用语言值小正大(PB)、正中(PM)、正小(PS)、零(Z)、负小(NS)、负中(NM)、负大(NB)来表示隶属函数为三角型(trimf),方法二:图-1模糊自适应Simu1ink模型根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计分数阶PID参数的模糊矩阵表,算出参数代入下式计算:Kp=KpO+(E,EOpjKi=KiO+(E,EC)I;Kd=KdO+(E,EC)d式中:KpO.KiO.KdO为P1D参数的初始设计值,由传统的PID控制器的参数整定方法设计。
基于simulink的模糊自适应pid三闭环控制设计及仿真

0 引言PID控制是目前应用于装备控制和自动化生产中一种比较成熟的控制方法,其具有算法相对简单、稳定性高和鲁棒性好的优点 [1]。
随着工业技术的发展对伺服电机的控制精度要求也在不断提高,单个PID控制器很难满足高精度的指标,目前常采用PID三闭环控制方法,即位置环、速度环、电流环组成的三环负反馈PID控制系统[2],PID 三闭环控制模型如图1所示。
其中内环是电流环,电流环为控制伺服电机输入电流大小的闭环回路,通过检测驱动器的输出电流值对设定电流进行调节,使得伺服电机的输入电流尽量接近设定电流;中间环是速度环,通过检测伺服电机编码器的速度反馈信号进行速度调节,速度环输出为电流环的设定,速度环的控制包含电流环控制;最外环为位置环,通过检测码盘位置信息进行位置控制,其输出为速度环的设定,在位置控制的同时进行速度和电流的控制[3-4]。
在使用PID三闭环控制方式控制伺服电机的过程中,需要对电流、速度、位置三环的PID参数依次进行调节,获得每个环中kp、ki、kd的最优值。
在实际调试中,由于三个PID控制器存在相互影响,需要调试人员具有较为丰富的经验,不断进行试验,以得到最优参数[5]。
当参数选择不合适时,系统容易发生超调现象,当一组最优PID参数选定后,负载变化或外部施加扰动时,伺服电机控制精度会迅速降低。
针对PID三闭环控制的缺点,本研究提出了基于模糊控制原理的模糊自适应PID三闭环控制方法。
1 模糊自适应PID三闭环控制方法设计模糊自适应PID控制以普通PID控制为基础,运用模糊数学的理论及方法,根据现有的工程经验,将相关运算规则用模糊集合表示,把模糊化后的控制规则作为先验知识储存于数据库中,然后根据系统输入信号的变化情况,计算机进行相应的模糊推理,实现对PID参数的自整定调整[6-8]。
在PID三闭环控制中,位置环反馈信号取自电机编码器或外部码盘,位置控制环输出为速度环的设定,在位置环控制模式下系统进行了电流、速度、位置三个环的运算,因此位置环PID控制器性能好坏很大程度上决定了PID三闭环控制的精度 [9]。
模糊控制位置跟踪的SIMULINK仿真

智能控制作业二“模糊控制位置跟踪的SIMULINK 仿真一、题目 设被控对象的传递函数为s s s G 252500)(2+=,输入信号为方波,周期为1秒,幅值为1,(可以用Pulse Generator 模块来产生)。
1)试设计两输入单输出模糊控制器,输入为偏差E 和偏差变化率EC ,输出为控制量U ,使系统输出能实时跟踪输入信号。
2)通过仿真理解并分析E 和EC 的参数选择对系统稳态误差和动态性能的影响,这些参数包括模糊子集的个数,论域的范围等。
作业中最好把不同参数下的仿真结果附上。
二、MATLAB 解决方案1、模糊控制模块的创建在MA TLAB 命令窗口中输入fuzzy 命令,会弹出模糊控制GUI 界面,打开隶属度函数编辑窗口,输入变量为E 和EC ,输出变量为U ,输入输出论域均设置为[-3 3],每个变量都设置NB ,NM ,NS ,ZO ,PS ,PM ,PB 七个模糊子集,每个变量的隶属度函数均如图1所示,为了使输入误差在零附近反应敏感,这一部分隶属度函数设置得比较尖。
图1 隶属度函数编辑窗口根据如表1输入控制规则,如图2所示:表1 控制规则编辑完成后可以看到如图3所示的模糊输入与输出的三维示意图:图2 控制规则输入窗口图3 输出三维示意图2、simulink的仿真新建一个model,搭建如图4所示的控制框图,保存为fuc2文件夹中的fuz_ctrl.mdl。
其中增益模块用来控制将输入或输出与模糊控制器的论域相匹配。
图4 simulink控制框图3、调试后的仿真结果经过调试优化,最终得到的仿真波形如图5所示。
其中Ke=3,Kec=0.06,Ku=1.图5 最终运行结果三、控制参数对控制结果的影响1、论域对控制结果的影响这里采用Ke和Kec来起到控制输入变量的论域的作用,当增大量化因子,相当于缩小了输入变量的论域,当减小量化因子时,相当于增大了输入变量的论域。
在原来的基础上改变Ke,Kec的值,通过观察跟踪效果来说明论域对控制结果的影响。
模糊控制实例及simulink仿真实验报告
模糊控制实例及simulink仿真实验报告
一、背景介绍
模糊控制是一种基于模糊逻辑的控制方法,其优点在于可以很好地处理复杂的非线性和不确定性系统,而且不需要精确的数学模型和计算,能够快速实现控制的优化。
二、实例介绍
本次实例采用一个双轮小车为对象,实现小车在平面上向指定位置运动的控制。
通过小车的速度和转向角两个输入变量,输出一个模糊控制信号,控制小车前进和转向。
三、实验过程
1. 建立模糊控制系统模型
打开Simulink软件,建立一个新模型,模型中包括输入变量、输出变量和控制器。
2. 设计输入变量和输出变量
(1)设计输入变量
本实例选择小车速度和转向角两个输入变量,每个变量包含三个模糊集合,速度变量分别为“慢速”、“中速”、“快速”,转向角变量分别为“左转”、“直行”、“右转”。
(2)设计输出变量
模糊控制信号输出变量选择小车的前进和转向,每个变量包含三个模糊集合,分别为“慢行”、“中行”、“快行”、“左转”、“直行”、“右转”。
3. 建立控制器
建立模糊控制器,包含输入变量和输出变量的关系,建立控制规则库和模糊关系。
4. 仿真实验
在Simulink下进行仿真实验,调整控制器参数,观察小车运动状态,对比试验。
四、实验结果
经过多次试验和调整,得到最优的小车模糊控制参数,可以实现小车的平滑运动
和准确转向。
五、实验结论
本实验通过建立一个小车的模糊控制系统,可以有效实现小车的平滑运动和准确转向,控制效果优于传统的PID控制方法。
模糊控制可以很好地处理非线性、不确定性和模糊性的系统,适合许多需要快速优化控制的场合。
基于SIMULINK无刷直流电机模糊PID控制的建模与仿真
i n s t r u c t i v e t o a c t u al l y b r u s hl e s s DC mo t or s p e e d c on t r ol s y s t em d e s i g n . Ke y wo r ds :B r u s h l e s s DC Mo t o r ; Dou b l e — l o o p Con t r ol ; F u z z y PI D Co n t r o l
a i mi n g a t t h e t y p i c al t wo - - ph a s e c o n du c t i o n s t ar t hr e e - - ph a s e s i x wor k s o f br u s hl es s DC
统的 P I D控 制 方法相 比有 更好 的稳 定性和抗干扰性 。
变量 、强耦合 、非线性的复杂系统 …,
因此 传统 P I D 控 制 器 难 以 获 得 满 意
态 响应 等 优 点 ,基 于无 刷 直 流 电机 具有一系列优点 ,已在交通 、工业、 家 电、航空航天、军工、伺服控制等 领域 都 被 广 泛地 使 用 ,因此 对其 控 制 方 式的研 究可 以更 广 泛的 挖掘 其
基于MATLAB_SIMULINK的直流电机模糊控制的仿真
理论与设计基于MATLAB/SIMULINK的直流电机模糊控制的仿真周小波 王群京 陈 伟 周嗣理安徽大学(230039)Fuzzy Control Simulation for Dc Motor Based on MATLAB/SIMULINKZhou Xiaobo Wang Qunjing Chen Wei Zhou SiliAnhui University双闭环调速系统[2]。
摘 要:介绍了直流电机的双闭环调速原理,并用M A T L A B构建了直流电机转速、电流双闭环调速系统的模型。
转速环采用模糊控制器,与传统的P I调节器进行比较,模糊控制器具有更好的控制性能。
关键词:双闭环 模糊控制 直流电机SIMULINKAbstract: The principle of double-closed-loop speedregulation system for dc motors was introduced and modelof it was established by means of MATLAB. The speed loop employed the fuzzy logical control. Compared with the traditional PI control, the fuzzy logical controller had better performance.Keywords:Dual-closed-loop Fussy logical controller DC motor由于直流电机系统本身的非线性,当被控对象特性发生变化时,P I调节器难以保持良好的控制性能。
因此本文设计了基于模糊自调节的P I控制器,根据专家的在线调整,以M A T L A B/ S I M U L I N K为工具箱,建立直流电机的常规控制和模糊控制的仿真模型。
1 双闭环调速系统1.1 双闭环调速系统的组成为了实现转速和电流两种负反馈分别起作用,在系统中分别设置两个调节器以调节转速和电流。
模糊pidmatlab(simulink)仿真详细步骤
下面用一个简单的例子作介绍:(本例不是特别针对实现什么功能,只是为了介绍方便)第一部分创建一个模糊逻辑(.fis文件)第一步:打开模糊推理系统编辑器步骤:在Commond Window 键入fuzzy回车打开如下窗口,既模糊推理系统编辑器第二步:使用模糊推理系统编辑器本例用到两个输入,两个输出,但默认是一个输人,一个输出步骤:1、添加一个输入添加一个输出得如下图2、选择Input、output(选中为红框),在Name框里修改各输入的名称并将And method 改为prod,将Or method 改为probor提示:在命名时’_’在显示时为下标,可从上图看出。
第三步:使用隶属函数编辑器该编辑器提供一个友好的人机图形交互环境,用来设计和修改模糊推理系中各语言变量对应的隶属度函数的相关参数,如隶属度函数的形状、范围、论域大小等,系统提供的隶属度函数有三角、梯形、高斯形、钟形等,也可用户自行定义。
步骤:1、双击任何一个输入量(In_x、In_y)或输出量打开隶属度函数编辑器。
2、在左下处Range和Display Range处添加取值范围,本例中In_x和In_y的取值范围均为[0 10], Out_x和Out_y的取值范围均为[0 1]3、默认每个输入输出参数中都只有3个隶属度函数,本例中每个输入输出参数都需要用到五个,其余几个需要自己添加:选中其中一个输入输出参数点击Edit菜单,选Add MFS…打开下列对话框将MF type设置为trimf(三角形隶属度函数曲线,当然你也需要选择其他类型) 将Number of MFs设置为2点击OK按钮同样给其他三个加入隶属度函数4、选中任何一个隶属度函数(选中为红色),在Name中键入名称,在Type 中选择形状,在Params中键入范围,然后回车如下图:5、关闭隶属函数编辑器第四步:使用规则编辑器通过隶规则编辑器来设计和修改“IF...THEN”形式的模糊控制规则。
基于simulink的模糊PID控制例子06465(谷风软件)
1模糊PID用命令Fuzzy打开模糊控制工具箱。
Anfisedit打开自适应神经模糊控制器,它用给定的输入输出数据建个一个模糊推理系统,并用一个反向传播或者与最小二乘法结合的来完成隶属函数的调节。
Surfview(newfis)可以打开表面视图窗口8.1 模糊PID 串联型新建一个simulink模型同时拖入一个fuzzy logic controller 模块,双击输入已经保存的fis模糊控制器的名字。
由于这个控制模块只有一个输入端口,需要用到mux模块。
模糊结合PID,当输出误差较大时,用模糊校正,当较小时,用PID校正。
8.2 模糊自适应PID(1)PID 参数模糊自整定的原则PID 调节器的控制规律为: u( k) = Kp e( k) + Ki Σe( i) + Kd ec( k)其中: Kp 为比例系数; Ki 为积分系数; Kd为微分系数; e( k) 、ec( k) 分别为偏差和偏差变化率.模糊自整定PID 参数的目的是使参数Kp 、Ki 、Kd随着e 和ec 的变化而自行调整,故应首先建立它们间的关系. 根据实际经验,参数Kp 、Ki 、Kd在不同的e 和ec 下的自调整要满足如下调整原则:(1) 当e 较大时,为加快系统的响应速度,防止因开始时e 的瞬间变大可能会引起的微分溢出,应取较大的Kp 和较小的Kd ,同时由于积分作用太强会使系统超调加大,因而要对积分作用加以限制,通常取较小的Ki值;(2) 当 e 中等大小时,为减小系统的超调量, 保证一定的响应速度, Kp 应适当减小;同时Kd 和Ki的取值大小要适中;(3) 当e 较小时,为了减小稳态误差, Kp 与Ki 应取得大些,为了避免输出响应在设定值附近振荡,同时考虑系统的抗干扰性能,Kd 值的选择根据|ec|值较大时,Kd 取较小值,通常Kd 为中等大小。
同时按照需要,将输入语言变量E 和EC 分为7 个模糊子集,分别用语言值正大( PB) 、正中( PM) 、正小( PS) 、零(Z) 、负小(NS) 、负中(NM) 、负大(NB) 来表示,它们的隶属函数为高斯型(gaussmf) ,输出语言变量Kp′、Ki′、Kd′用语言值小正大( PB) 、正中( PM) 、正小( PS) 、零(Z) 、负小(NS) 、负中(NM) 、负大(NB) 来表示隶属函数为三角型(t rimf) ,方法二:图-1模糊自适应simulink模型根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计分数阶PID参数的模糊矩阵表,算出参数代入下式计算:Kp=Kp0+(E,EC)p;Ki=Ki0+(E,EC)I;Kd=Kd0+(E,EC)d式中:Kp0、Ki0、Kd0为PID参数的初始设计值,由传统的PID控制器的参数整定方法设计。
基于Matlab_Simulink的电动汽车驱动系统起动过程的模糊控制与仿真
作者简介:冉振亚(1949-),男,重庆大学副教授;从事汽车绿色技术及天然气汽车技术的开发工作。
基于M a tlab Si m ul i nk 的电动汽车驱动系统起动过程的模糊控制与仿真冉振亚1,杨 超1,2,曹文明1,2(11重庆大学机械工程学院,重庆 400044;21国家客车质量监督检验中心,重庆 400067)摘 要:利用M atlab Si m u link 对电动汽车驱动用永磁同步电动机(Perm anen t M agnet Syn 2ch ronou s M o to r ,PM S M )的驱动系统起动过程进行模糊控制并对其结果进行仿真。
关键词:电动汽车;起动;模糊控制;仿真Abstract :T h is paper researches the fuzzy con tro l and si m u lati on of the starting p rocess fo r electrical veh icle to u sethe Perm anen t M agnet Synch ronou sM o to r (P M S M )by u se of M atlab Si m u link 1Key words :E lectrical veh icle ;Starting system ;Fuzzy con tro l ;Si m u lati on中图分类号:U 469172 文献标识码:A 文章编号:100623331(2004)0420001203 为了保护人类赖以生存的环境,汽车的绿色技术成为当今的热门话题;特别是当前石油资源面临枯竭,促使绿色汽车的开发成为世界汽车发展的主流。
电动汽车是当今绿色汽车之一,其中电动机驱动系统(亦称电动机及其控制系统)是电动汽车的心脏,是电动汽车研制的关键技术之一。
在电动汽车驱动系统中,PM S M 具有动态性能好、体积小、重量轻等优点,是电动汽车驱动系统的最理想的选择[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
已知系统的传递函数为:1/(10s+1)*e(-0.5s)。
假设系统给定为阶跃值r=30,系统初始值r0=0.试分别设计
(1)常规的PID控制器;
(2)常规的模糊控制器;
(3)比较两种控制器的效果;
(4)当通过改变模糊控制器的比例因子时,系统响应有什么变化?
一.基于simulink的PID控制器的仿真及其调试:
调节后的Kp,Ki,Kd分别为:10 ,1,0.05。
示波器观察到的波形为:
二.基于simulink的模糊控制器的仿真及其调试:
(1)启动matlab后,在主窗口中键入fuzzy回车,屏幕上就会显现出如下图所示的“FIS Editor”界面,即模糊推理系统编辑器。
(2)双击输入量或输出量模框中的任何一个,都会弹出隶属函数编辑器,简称MF编辑器。
(3)在FIS Editor界面顺序单击菜单Editor—Rules出现模糊规则编辑器。
本次设计采用双输入(偏差E和偏差变化量EC)单输出(U)模糊控制器,E的论域是[-6,6],EC的论域是[-6,6],U的论域是[-6,6]。
它们的状态分别是负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)。
语言值的隶属函数选择三角形的隶属度函数。
推理规则选用Mamdani 控制规则。
该控制器的控制规则表如图所示:
Simulink仿真图如下:
在调试过程中发现加入积分调节器有助于消除静差,通过试凑法得出量化因子,比例因子以及积分常数。
Ke,Kec,Ku,Ki分别是:
3 ,2.5 ,3.5 ,0.27
三.实验心得:
通过比较PID控制器和模糊控制器,我们可知两个系统观察到的波形并没有太大的区别。
相对而言,对于给出精确数学模型的控制对象,PID控制器显得更具有优势,其一是操作简单,其二是调节三个参数可以达到满意的效果;对于给出给出精确数学模型的控制对象,模糊控制器并没有展现出太大的优势,其一是操作繁琐,其二是模糊控制器调节参数的难度并不亚于PID控制器。
在实验中增大模糊控制器的比例因子Ku会加快系统的响应速度,但Ku过大将会导致系统输出上升速率过快,从而使系统产生较大的超调量乃至发生振荡;Ku过小,系统输出上升速率变小,将导致系统稳态精度变差。