理论力学1-4分析力学1
理论力学第四部分-分析力学
第四部分 分析力学第13章 达朗贝尔原理上面几章我们是以牛顿定律为基础研究质点和质点系的动力学问题,给出了求解质点和质点系动力学问题的普遍定理。
这一章我们要学习求解非自由质点系动力学问题的新方法——达朗贝尔原理,它是用静力学平衡的观点解决动力学问题,又称为动静法。
它在解决已知运动求约束力方面显得特别方便,因此在工程中得到广泛的应用。
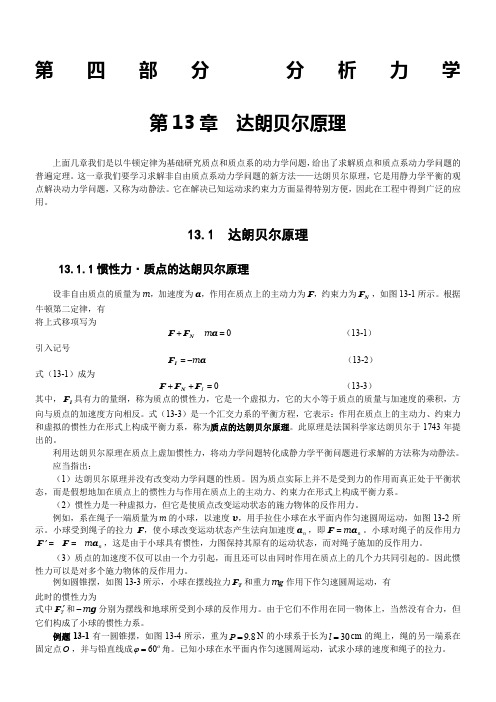
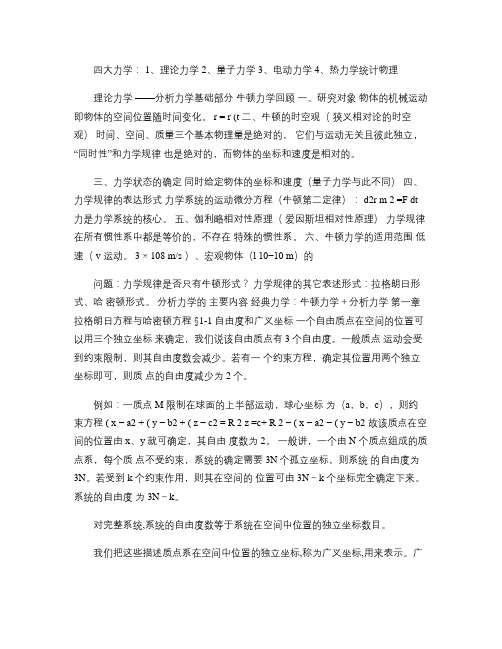
13.1 达朗贝尔原理13.1.1惯性力·质点的达朗贝尔原理设非自由质点的质量为m ,加速度为a ,作用在质点上的主动力为F ,约束力为N F ,如图13-1所示。
根据牛顿第二定律,有 将上式移项写为0=m +a F F N - (13-1)引入记号a F I m =- (13-2)式(13-1)成为0=++I F F F N (13-3)其中,I F 具有力的量纲,称为质点的惯性力,它是一个虚拟力,它的大小等于质点的质量与加速度的乘积,方向与质点的加速度方向相反。
式(13-3)是一个汇交力系的平衡方程,它表示:作用在质点上的主动力、约束力和虚拟的惯性力在形式上构成平衡力系,称为质点的达朗贝尔原理。
此原理是法国科学家达朗贝尔于1743年提出的。
利用达朗贝尔原理在质点上虚加惯性力,将动力学问题转化成静力学平衡问题进行求解的方法称为动静法。
应当指出:(1)达朗贝尔原理并没有改变动力学问题的性质。
因为质点实际上并不是受到力的作用而真正处于平衡状态,而是假想地加在质点上的惯性力与作用在质点上的主动力、约束力在形式上构成平衡力系。
(2)惯性力是一种虚拟力,但它是使质点改变运动状态的施力物体的反作用力。
例如,系在绳子一端质量为m 的小球,以速度v ,用手拉住小球在水平面内作匀速圆周运动,如图13-2所示。
小球受到绳子的拉力F ,使小球改变运动状态产生法向加速度n a ,即n m =a F 。
小球对绳子的反作用力n m ==a F F --′,这是由于小球具有惯性,力图保持其原有的运动状态,而对绳子施加的反作用力。
理论力学知识点总结
理论力学知识点总结理论力学是研究物体运动规律的一门基础物理学科,它主要研究在力的作用下物体的运动状态。
以下是理论力学的知识点总结:1. 基本概念- 力:物体间的相互作用,可以改变物体的运动状态。
- 质量:物体所含物质的多少,是物体惯性大小的量度。
- 惯性:物体保持其运动状态不变的性质。
- 运动:物体位置随时间的变化。
- 静止:物体相对于参照系位置不发生改变的状态。
2. 牛顿运动定律- 第一定律(惯性定律):物体在没有外力作用下,将保持静止或匀速直线运动。
- 第二定律(加速度定律):物体的加速度与作用力成正比,与物体质量成反比,方向与作用力方向相同。
- 第三定律(作用与反作用定律):对于任何两个相互作用的物体,它们之间的作用力和反作用力大小相等、方向相反。
3. 功和能- 功:力在物体上做功,等于力与位移的乘积,是能量转化的量度。
- 动能:物体由于运动而具有的能量,与物体质量和速度的平方成正比。
- 势能:物体由于位置而具有的能量,与物体位置有关。
- 机械能守恒定律:在没有非保守力做功的情况下,系统的机械能(动能加势能)保持不变。
4. 动量和角动量- 动量:物体运动状态的量度,等于物体质量与速度的乘积。
- 角动量:物体绕某一点旋转运动状态的量度,等于物体质量、速度与该点到物体距离的乘积。
- 动量守恒定律:在没有外力作用的系统中,系统总动量保持不变。
- 角动量守恒定律:在没有外力矩作用的系统中,系统总角动量保持不变。
5. 刚体运动- 平动:刚体上所有点的运动状态相同,即刚体整体移动。
- 转动:刚体绕某一点或某一轴的旋转运动。
- 刚体的转动惯量:衡量刚体对转动的抵抗程度,与刚体的质量分布和旋转轴的位置有关。
6. 振动和波动- 简谐振动:物体在回复力作用下进行的周期性振动,其运动方程为正弦或余弦函数。
- 阻尼振动:在阻尼力作用下的振动,振幅随时间逐渐减小。
- 波动:能量在介质中的传播,包括横波和纵波。
7. 分析力学- 拉格朗日力学:通过拉格朗日量(动能减势能)来描述物体的运动。
理论力学说课
4.理论力学的能力培养
1. 解决工程技术中的实际问题 综合运用高中及大学学过的数学及力学知识,解决工程技术中 的实际问题,培养学以致用的能力,理论与实践相结合。
2. 为学习后续专业课打下理论基础
3. 培养将实物模型转化为力学模型处理的能力
4.培养辩证唯物主义世界观,树立正确的逻辑思维方法,提高分析 问题解决问题的能力 TIPS:力学模型的简化中,强调忽略次要矛盾,抓主要矛盾,用于 指导实际工作。 该门课程十分有必要
建立各种力系 的平衡条件
静力学
受力分析、力系简化
刚体的静力学与运 动学的结合点
运动学ቤተ መጻሕፍቲ ባይዱ
动力学
运动与作用力
点、刚体运动 的规律分析
运动的几何性质
一、课程简介
3、教材分析
• 教材:赫桐生编《理论力学》。在这本书中,突出了机械系统相关 的力学概念、力学理论的阐述,与实际联系紧密,加强了分析问题、 解决问题的方法,并对与力学理论有关的物理学上的新成就做了一 些简要的介绍,拓宽了学生的知识面。
掌握运动合成和分解的基本概念和方法。熟练应用点的速度合成定理求解有关速度问题,能应用牵连运动为平动和定轴转动时,点的加速度 合成定理求解有关加速度问题,了解科氏加速度的概念。
熟悉刚体平面运动的特征。能熟练运用基点法、瞬心法和速度投影定理对常见的平面机构进行速度分析,并能应用基点法求解有关加速度问 题。
《理论力学》 说课
物理与机电工程学院
内容提要
➢ 一、课程简介(设置分析) ➢ 二、课程设计的理念与思路 ➢ 三、课程内容分析 ➢ 四、学生分析 ➢ 五、课程组织与实施 ➢ 六、课程评价方式
一、课程简介
理论力学知识总结
学生整理,时间有限,水平有限,仅供参考,如有纰漏,请以老师、课本为主。
第一章质点力学(1)笛卡尔坐标系 位置:k z j y i x ++=r速度:k z j y i x dtr d ...v ++== 加速度:k z j y i x dtv d ......a ++== (2)极坐标系坐标:j i e r θθsin cos += j i e θθθcos sin +-= r e r =r 速度:r r .v = .v θθr =加速度:2...θr r a r -= .....2θθθr r a += (3)自然坐标系(0>θd ) 坐标:ds r d e t =θd e d e t n = θρd ds = 速度:t e v v = 加速度:n t e v e v ρ2.a +=(4)相对运动(5)牛顿运动定律 牛顿第一定律:惯性定律 牛顿第二定律:)(a m v m P dtP d dt v d m F ==== 牛顿第三定律:2112F F -= (6)功、能量vF dt rd F dt dW P rFd dA ⋅=⋅=== (7)(7)有心力第二章 质点动力学的基本定理知识点总结: 质点动力学的基本方程质点动力学可分为两类基本问题:. (1) .已知质点的运动,求作用于质点的力; (2) 己知作用于质点的力,求质点的运动。
动量定理 动量:符号动量定理微分形式动量守恒定律:如果作用在质点系上的外力主失恒等于零,质点系的动量保持不变。
即:质心运动定理:质点对点O 的动量矩是矢量mv r J i ⨯= 质点系对点0的动量矩是矢量i ni nii i i v m r J J ∑∑=⨯==1若z 轴通过点0,则质点系对于z 轴的动量矩为∑==ni z z z J M J ][若C 为质点系的质心,对任一点O 有 c c c J mv r J +⨯=02. 动量矩定理∑∑=⨯=⨯=nie i i n i i i i M F r v m r dt d dt dJ )()( 动量矩守恒:合外力矢量和为零,则动量矩为常矢量。
分析力学

《分析力学》简介The Brief Introduction of Analytical Mechanics一.分析力学与经典力学分析力学是理论力学的一个分支,是对经典力学的高度数学化的表达,它通过用广义坐标为描述质点系的变数,运用数学分析的方法,研究宏观现象中的力学问题。
分析力学是独立于牛顿力学的描述力学世界的体系,其基本原理同牛顿运动三定律之间可以互相推出。
经典力学最初的表达形式由牛顿给出,大量运用几何方法和矢量作为研究工具,因此它又被称为矢量力学(也称为“牛顿力学”)。
拉格朗日,哈密顿,雅可比等人使用广义坐标和变分法,建立了一套同矢量力学等效的力学表述方法。
同矢量力学相比,分析力学的表述方法具有更大的普遍性。
很多在矢量力学中极为复杂的问题,运用分析力学可以较为简便的解决。
分析力学的方法可以推广到量子力学系统和复杂动力学系统中,在量子力学和非线性动力学中都有重要应用。
分析力学解题法和牛顿力学的经典解题法不同,牛顿法把物体系拆开成分离体,按反作用定律附以约束反力,然后列出运动方程。
分析力学是经典物理学的基础之一,也是整个力学的基础之一。
它广泛用于结构分析、机器动力学与振动、航天力学、多刚体系统和机器人动力学以及各种工程技术领域,也可推广应用于连续介质力学和相对论力学。
二.发展历程从十八世纪开始,在力学发展史上又出现了与矢量力学并驾齐驱的另一力学体系,即分析力学。
1788 年拉格朗日出版的《分析力学》是世界上最早的一本分析力学的著作。
分析力学是建立在虚功原理和达朗贝尔原理的基础上。
两者结合,可得到动力学普遍方程,从而导出分析力学各种系统的动力方程。
1760~1761 年,拉格朗日用这两个原理和理想约束结合,得到了动力学的普遍方程,几乎所有的分析力学的动力学方程都是从这个方程直接或间接导出的。
分析力学的特点是对能量与功的分析代替对力与力矩的分析。
为了避免未知理想约束力的出现,分析力学的一种方法是在理想约束力与约束方程间建立起一种直接的关系,导出了比矢量力学一般方法程式化更为明显的动力学方程-拉格朗日第一类方程。
分析力学.
i i i T
mq p q
∂==∂
由于势能函数只与广义坐标有关,与广义速度无关,因此
(i i i i T U T L
p q q q
∂−∂∂===∂∂∂称为广义动量i L
q
∂∂二、勒让德变换设有函数(
,f f x y =((d d d ,d ,d f f
f x y P x y x Q x y y
问题:力学规律是否只有牛顿形式?力学规律的其它表述形式:拉格朗日形式、哈密顿形式。分析力学的主要内容经典力学:牛顿力学+分析力学第一章拉格朗日方程与哈密顿方程§1-1自由度和广义坐标一个自由质点在空间的位置可以用三个独立坐标来确定,我们说该自由质点有3个自由度。一般质点运动会受到约束限制,则其自由度数会减少。若有一个约束方程,确定其位置用两个独立坐标即可,则质点的自由度减少为2个。
r xi yj zk
=++
U U U U F U i j k
r x y z
∂∂∂∂=−∇=−=−−−∂∂∂∂
2、若单个质点在保守力场中运动:
——势能函数(U r
分量形式:x y z U
mx F x U my
F y U mz
F z ⎧∂==−⎪∂⎪
∂⎪
==−⎨∂⎪
⎪∂==−⎪∂⎩
若记x ,y ,z为q 1,q 2,q 3,
p q
∂=∂ (
d 01,2,,d i i L L
i s t q
q ⎛⎞∂∂−
==⋅⋅⋅⎜⎟∂∂⎝⎠ d d i i
L p t q ∂⇒=∂根据拉格朗日方程
1、哈密顿函数i i
L p
q ∂⇒=∂ 11d d d s
理论力学
绪 论理论力学是物理学专业学生必修的一门重要专业基础课,又是后续三大理论物理课程(即:电动力学、热力学与统计物理学、量子力学)的基础。
理论力学虽然讲授经典理论,但其概念、理论及方法不仅是许多后继专业课程的基础,甚至在解决现代科技问题中也能直接发挥作用。
近年来,许多工程专业的研究生常常要求补充理论力学知识以增强解决实际问题能力,因此学习理论力学课程的重要性是显然的。
既然我们将开始学习理论力学这门课程,我们至少应该了解什么是理论力学?一.什么是理论力学?1. 它是经典力学.理论力学是基础力学的后继课程,它从更深更普遍的角度来研究力与机械运动的基本规律。
当然它仍然属于经典力学,这里“经典”的含义本身就意味着该学科是完善和已成定论的,它自成一统,与物理学及其它学科所要探索的主流毫不相干。
正因为如此,原本属于物理学的力学,经过三百多年的发展到达20世纪初就从物理学中分化出来,并与数、理、化、天、地、生一起构成自然科学中的七大基础学科。
由于理论力学它是经典力学,因此它不同与20世纪初发展起来的量子力学,也不同于相对论力学。
它研究的机械运动速度比光速要小得多,它研究的对象是比原子大得多的客观物体。
如果物体的速度很大,可以同光速比拟,或者物体尺度很小如微观粒子,在这种情况下,经典力学的结论就不再成立,失去效用,而必须考虑它的量子效应和相对论效应。
因此,理论力学它有一定的局限性和适用范围,它只适用于c v << h t p t E >>∆⋅⋅)( (h —普朗克常数)的情况,不再适用于高速微观的情况。
经典力学的这一局限性并不奇怪,它完全符合自然科学发展的客观规律……。
从自然科学发展史的角度来看,由于力学是发展得最早的学科之一,这就难免有它的局限性。
因此,在某种意义上来说它确是一门古老而成熟的理论。
尽管理论力学是一门古老而成熟的理论,这并不意味着它是陈旧而无用的理论。
它不管是在今天还是在将来都仍是许多前沿学科不可缺少的基础。
分析力学基础第一章(4-6节)

T q
m1
m2 x m2 Lcos
px
循环积分——系统的水平动量守恒
T V C
能量积分——机械能守恒
x
F t
vA
m1 g
CvCA
m2 g
§1-6 第一类拉格朗日方程
§1-6 第一类拉格朗日方程
设描述系统的位形坐标:q1 , q2 , , qn
系统的约束方程为: fk r1, r2 , , rn , t 0 k 1,2, , s
i 1
k 1
代入动力学普遍方程:
n
Fi FIi
ri
n
Fi
miri ri
0
i 1
i 1
有:
n i 1
Fi
miri ri
N Qk
k1
n i 1
miri
ri qk
qk
§ 1-4 第二类拉格朗日方程
n
i 1
Fi
miri ri
N Qk
k1
n i 1
miri
解:1、系统的自由度为k=1
2、系统的广义坐标:
3、系统的动能: T 1 1 m l22 1 m l22
23
6
4、系统的势能:
V
mg
l
1
cos
5、拉格朗日函数: 2
L T V 1 ml22 mg l 1 cos
OB
6
2
d dt
L qk
L qk
0
1 m l2 l m gsin
3
2
mg A
i 1
Fi
miri
s
k
k 1
fk ri
ri
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Analytical mechanics
分析力学
分析静力学基础 (虚位移原理) 分析动力学基础
第一章 分析静力学基础 虚位移原理) (虚位移原理)
虚位移原理
引论 约束及其分类 虚位移,理想约束 虚位移原理 自由度,广义坐标
虚位移原理
引论
刚体静力学的局限性 问题的引入
虚位移原理
刚体静力学的局限性
∑(Fi +FNi ) δri = ∑Fi δri + ∑FNi δr i > 0 ∴ ∑F δr > 0 ∵ ∑FNi δr i = 0 i i 与 ∑F δr = 0 矛盾. i i
所以,原质点系一定平衡.
虚位移原理
O
虚位移原理
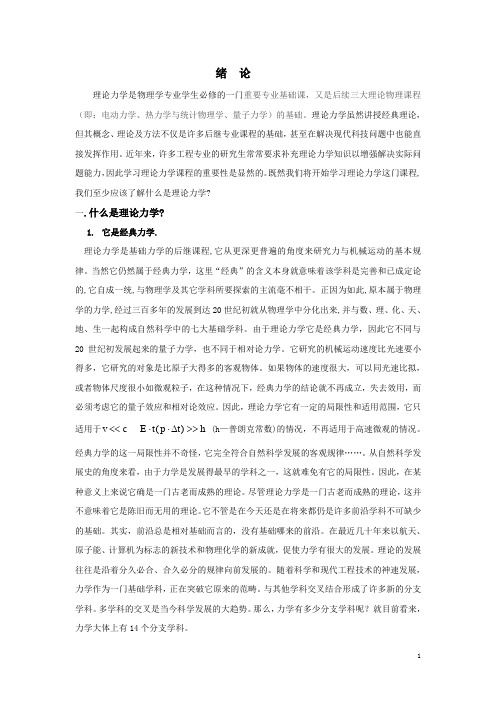
例2,结构尺寸如图示,试问系统平衡时角应等于多大?
B
Q
rA = 7l sin rB = 2l cos δrA = 7l cosδ δrB = 2l sin δ
δ
虚位移原理
虚位移的计算
2,虚速度法
虚位移,理想约束
P
δrB δvB PA = = δrA δvA PB
sin( +θ ) = cosθ
δrA
O
A
θ
B
δrB
虚位移原理
理想约束 定义
虚位移,理想约束
如果约束力在系统的任何虚位移中的元功(虚功) 之和为零,则这种约束称为理想约束. 实例: 1,光滑固定曲面或曲线 2,用以连接两物体的光滑铰链 3,连接两质点的刚性杆 问题: 1,主动力的实功为零,其虚功是否一定为零? 2,系统约束力的虚功为零,实功是否一定为零?
i =1 2, n , , j = 1 2,, S ,
v
(x, y)
x2 + y2 = (l vt)2
虚位移原理
几何约束
约束及其分类
固执约束(双面约束): 约束方程以等式形式出现. f j (xi , yi , zi ) = 0
几何约束
i =1 2,, n , j = 1 2,, S ,
l
(x, y)
M(x, y, z) δ r = δ xi +δ y j +δ zk → M (x +δ x, y +δ y, z +δ z) 1 f (x +δ x, y +δ y, z +δ z) = 0 f 0 = δ f = f (x +δ x, y +δ y, z +δ z) f (x, y, z) f f f = δ x + δ y + δ z + o(δ r ) x y z f f f δ f ≈ δ x + δ y + δ z = f δ r = 0 x y z
虚位移原理
定义1
虚位移,理想约束
在不破坏系统约束的条件下,质点系或其中各个质 点可能发生的任何微小位移称为质点系的可能位移.
定义2
质点的任何两个可能位移之差称为虚位移.
虚位移与实位移 有何关系
虚位移原理
定理
虚位移,理想约束
约束在某曲面上的质点的虚位移,在曲面过该点的 切面上. 证明: 设质点的约束方程为 f (x, y, z) = 0
Fi δri +FNi δri = 0
∵
∑FNi δr i = 0
∑Fi δri + ∑FNi δr i = 0 ∴ ∑F δr = 0 i i
虚位移原理
证明:充分性(反证法)
虚位移原理
不妨假设仅质点i不平衡. 设∑F δr = 0,但质点系不平衡. i i 即: +F i ≠ 0 由: = δ = (F +FNi ) dr = (Fi +FNi ) δri > 0 dT W i F i N i
k n
∑
∑Qj δqj = 0 j
=1
∵δqj ≠ 0 而且完全独立
Q =0 j
具有理想,完整约束的系统,平衡的充分必 j = 1,2,,k 要条件是对应每一个广义坐标的广义力都为零.
虚位移原理
自由度,广义坐标
广义力的计算 n n yi r xi zi i +FZi = ∑(FXi +F ) 1 Qj = ∑F i Yi qj qj qj qj i =1 i =1
虚位移原理
δrA δrB
B A
虚位移,理想约束
例1,下图的分析是否正确?
Q
P
C
δrC
D
δrD
虚位移原理
虚位移的计算
虚位移,理想约束
sin( +θ ) δ xB = rδ δrA = (δ xA )2 + (δ yA)2 cosθ rA = rδ sin( +θ ) 2 2 A δrB = (δ xB ) + (δ yB ) = rδ B cosθ δrB sin( +θ ) O θ = δrA cosθ δrB
非固执约束(单面约束): 约束方程以不等式形式出现. f j (xi , yi , yi , t) ≤ 0
i =1 2, n , , j = 1 2,, S ,
虚位移原理
运动约束
约束及其分类
完整约束: 约束方程中不含坐标对时间的导数, 或,可积分为有限形式的无限形式.
运动约束
xC = r
非完整约束: 约束方程不可以积分成有限形式的.
{
xi = xi (q1,q2, , qk )
虚位移原理
自由度,广义坐标
以广义坐标表示的系统平衡条件 n k k n r r i F (∑ i δqj ) = 0 ∑Fi δri = 0 δ ri = ∑qj δqj ∑ i j =1 qj i =1 j =1 i =1
n r r 称为对应于 i (∑F )δqj = 0 令Q = F i 以广义坐标 ∑ i =1 i q j i qj j =1 j i =1 q j的广义力 k
( xi , yi )
A ( x, y )
ห้องสมุดไป่ตู้
xi yi =0 =1 y y yi = li cos( +i ) yi xi +F Q = ∑(FXi )= ∑F = 0 Xi x Yi x x yi xi Q = ∑(F +F )= ∑F = 0 y Xi Yi Yi y y yi xi Q = ∑(FXi +F ) = ∑m = 0 A Yi
虚位移原理
虚位移原理
虚位移原理
具有定常,理想,双面约束的质点系在某一位置 平衡的充分必要条件是:所有作用在该系统上的主动 力在任何虚位移上所做的虚功之和为零. 即:
∑δW = ∑Fi δri = 0
F +F i = 0 i N
证明:必要性 设质点系在某一位置平衡,则该质点 系中每一质点都是平衡的.即:
广义坐标
用来确定质点系位置的独立参数. 在完整约束的情况下,广义坐标的数目等于自由 度的数目.
虚位移原理
例
自由度,广义坐标
2 2 x1 + y1 = r2 (x2 x1)2 + ( y2 y1)2 = l 2 y2 = 0
r
O
A (x1, y1)
l
B (x2 , y2 )
x1 = r cos
2
l
C
δrC
D
E
Q
l
D
C
δrE
δ
E
Q
δ
A
A
B
δrD
δrB
FBx
B
虚位移原理
自由度
自由度,广义坐标
一个由n个质点所组成的质点系的虚位移并不是完 全独立的,是因为有约束的缘故. 一质点系所具有的独立虚位移的个数称为该质点 系的自由度. 受完整约束的质点系的自由度数为确定该质点系 位置的独立坐标的个数.
B
O
Bd B B B
虚位移原理
引论
问题 对于任意的非自由质点系是否都能 以功的形式给出平衡条件?
怎么办?
虚位移原理
约束
约束及其分类
限制质点系中各个质点的位置和运动的条件. 几何约束(位置约束): 限制质点或质点系在空间的几何位置的条件. f j (xi , yi , zi , t) = 0 i =1,2,, n j =1,2,, S 运动约束(微分约束): 除了限制质点或质点系在空间的几何位置外, 还限制其速度的条件. r i =1,2,, n j =1,2,, S f (r , r , , t) = 0
O
y1 = r sin x2 = r cos + l 2 + r2 sin 2
2 2 2 x1 + y1 = l1
y2 = 0
2 (x2 x1)2 + ( y2 y1)2 = l2
l1
A (x1, y1)
ψ
B (x2 , y2 )
x1 = l1 cos y1 = l1 sin x2 = l1 cos + l2 cosψ y2 = l1 sin l2 sin ψ
∑F δr = 0,
i i
(7Pl cos 2Ql sin )δ = 0
A
P
7P = arctg 2Q
虚位移原理
1 δrE = δrB 2
l 2
虚位移原理
QδrE FBxδrB PδrD = 0
1 1 FBy = ?P Q 2 P 4
例3,求图示三铰拱B处的约束反力.
1 δrD = ? δrB 4 1 1 FBx = Q P 2 4 P l
虚位移原理
自由度,广义坐标
在一般情况下,具有k个自由度的完整系统,可用k 个广义坐标q1,q2,…,qk来确定系统的位置,此时系 统内任意一点的位置可以表示为广义坐标的函数.