(完整word版)PID调节方法分享S7-1200PID
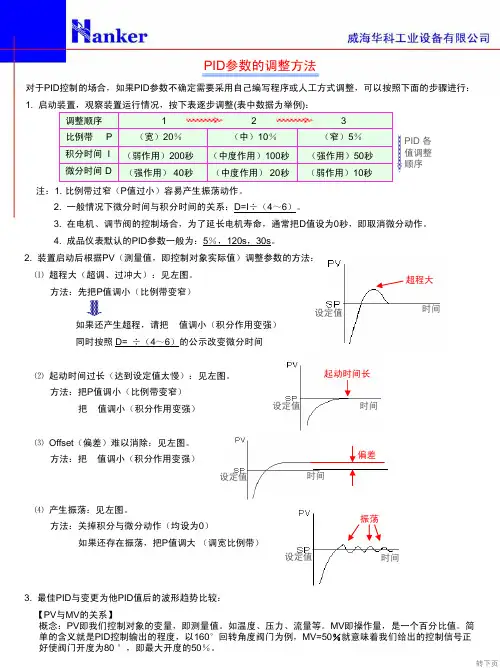
PID参数调整方法
结果:起动时间长
分
值
MV
PV MV
积分值大、微分值大 结果:起动时间长
小
PV
︵
强
作
MV
用
嗼
积分值小、微分值小 结果:积分太强,微分动作 较弱,起动时产生超程。
小(弱作用)
PV
最佳PID值
MV
微分值
积分值小、微分值大 结果:由于积分、微分动作 均强,MV变化剧烈,PV值 难以稳定下来。
大(强作用)
2. 装置启动后根据PV(测量值,即控制对象实际值)调整参数的方法:
⑴ 超程大(超调、过冲大):见左图。 方法:先把P值调小(比例带变窄)
超程大
如果还产生超程,请把 *值调小(积分作用变强)
设定值
时间
同时按照 D=*÷(4~6)的公示改变微分时间
⑵ 起动时间过长(达到设定值太慢):见左图。 方法:把P值调小(比例带变窄) 把 *值调小(积分作用变强)
ffset(偏差)难以消除:见左图。 方法:把 *值调小(积分作用变强)
设定值
时间
偏差
⑷ 产生振荡:见左图。 方法:关掉积分与微分动作(均设为0) 如果还存在振荡,把P值调大 (调宽比例带)
设定值
振荡 时间
3. 最佳PID与变更为他PID值后的波形趋势比较:
【PV与MV的关系】 概念:PV即我们控制对象的变量,即测量值。如温度、压力、流量等。MV即操作量,是一个百分比值。简 单的含义就是PID控制输出的程度,以160°回转角度阀门为例,MV=50%就意味着我们给出的控制信号正 好使阀门开度为80 °,即最大开度的50%。
PV
PV
PV
MV
MV
MV
P=1.5%
西门子博途S7-1200PLC编程之PID控制实例(4)
组态 PID 控制器【简介】以下步骤将介绍如何使用工艺对象“PID_Compact”组态 PID 控制器。
PID 控制器组态的设置● 控制器类型控制器类型用于预先选择需控制值的单位。
在本例中,将单位为“°C”的“温度”(Temperature) 用作控制器类型。
● 输入/输出参数在该区域中,为设定值、实际值和工艺对象“PID_Compact”的受控变量提供输入和输出参数。
要在没有其它硬件的情况下使用PID控制器,请将“PID_Compact”的输入和输出参数链接到与仿真块“PROC_C”互连的“output_value”和“temperature”变量:– 实际值由“PROC_C”仿真并用作“PID_Compact”的输入。
在本例中,实际值为映射到“temperature”变量中的加热室中的测量温度。
– 受控变量由工艺对象“PID_Compact”计算,是该块的输出参数。
受控变量映射在“out put_value”变量中并用作“PROC_C”的输入值。
下图显示了工艺对象“PID_Compact”和仿真块“PROC_C”的互连方式。
【要求】● 循环中断 OB“PID [OB200]”处于打开状态。
● 已在组织块“PID [OB200]”中调用了“PID_Compact”块。
● 已在组织块“PID [OB200]”中调用了“PROC_C”仿真块。
【步骤】要组态工艺对象“'PID_Compact”并将其与仿真块“PROC_C”互连,请按以下步骤操作: 1. 在巡视窗口中打开 PID 控制器的组态。
2. 选择控制器的类型。
3. 输入控制器的设定值。
4. 分别为实际值和受控变量选择“输入”(input)和“输出”(output)。
从而指定将使用用户程序的某个变量中的值。
说明Input(_PER) -Output(_PER)使用输入和输出为输入或输出参数提供用户程序的实际值。
使用Input_PER 和Output_PER可将模拟量输入用作实际值或将模拟量输出用作受控值输出。
PID调节参数及方法
PID调节参数及方法PID控制是一种常用的自动控制方法,它可以根据系统的实时反馈信息,即误差信号,来调整控制器的输出信号,从而实现系统的稳定性和性能优化。
PID调节参数是PID控制器中的比例系数、积分系数和微分系数。
调节这些参数可以达到所需的动态性能和稳态精度。
下面将介绍PID调节参数及常用的调节方法。
1.比例系数(Kp):比例系数用来调节控制器输出信号与误差信号的线性关系。
增大比例系数可以加快系统的响应速度,但可能会引起系统的超调和不稳定。
减小比例系数可以提高稳定性,但可能会导致系统的响应速度变慢。
调节比例系数的方法一般有经验法和试探法。
经验法:根据经验将比例系数初值设为1,然后逐渐增大或减小,观察系统的响应情况。
当增大比例系数时,如果系统的超调量明显增加,则应适当减小比例系数;相反,如果系统的超调量过小,则应适当增大比例系数。
反复调节,直到得到满意的响应。
试探法:根据系统的特性进行试探调节。
根据系统的频率响应曲线或步跃响应曲线,选择适当的比例系数初值,然后逐渐增大或减小,观察系统的响应。
如果系统的过冲量大,则应适当减小比例系数;如果系统的响应速度慢,则应适当增大比例系数。
反复试探调节,直到得到满意的响应。
2.积分系数(Ki):积分系数用来补偿系统的静差,增加系统的稳态精度。
增大积分系数可以减小系统的稳态误差,但可能会引起系统的震荡和不稳定。
减小积分系数可以提高稳定性,但可能会导致系统的静差增大。
调节积分系数的方法一般有试探法和校正法。
试探法:将积分系数初值设为0,然后逐渐增大,观察系统的响应。
如果系统的震荡明显增强,则应适当减小积分系数;相反,如果系统的响应速度慢,则应适当增大积分系数。
反复试探调节,直到得到满意的响应。
校正法:根据系统的静态特性进行校正调节。
首先将比例系数设为一个适当的值,然后减小积分系数,直到系统的静差满足要求。
这种方法通常用于对稳态精度要求较高的系统。
3.微分系数(Kd):微分系数用来补偿系统的过冲和速度变化,增加系统的相对稳定性。
pid调节参数设置技巧
PID调节参数设置技巧1. 简介PID控制是一种常用的闭环控制算法,用于调节系统的输出使其与期望值尽可能接近。
PID控制器通过调节三个参数,即比例增益(Proportional Gain,简称P)、积分时间(Integral Time,简称I)和微分时间(Derivative Time,简称D),来实现对系统的精确控制。
在实际应用中,合适的PID参数的选择对于系统的稳定性和性能至关重要。
本文将介绍一些PID调节参数设置的技巧,帮助您更好地调节PID控制器。
2. 初始参数设定在开始调节PID参数之前,首先需要设定一组初始参数。
这些参数将作为起点,通过逐步调节的方式找到最适合系统的PID参数。
通常情况下,可以将P参数设定为一个较大的值,I参数设定为一个较小的值,而D参数设定为零。
具体的数值可以根据系统的特性和要求进行调整。
3. 步骤一:调节P参数P参数是比例增益参数,用于响应系统输出与期望值之间的差异。
当P参数过大时,系统输出可能会发生超调现象;当P参数过小时,系统回应速度可能会缓慢。
为了调节P参数,可以按照以下步骤进行: - 将P参数设定为一个较小的值,例如0.1。
- 观察系统的响应,检查是否有超调现象,以及系统是否能够快速达到期望值。
- 如果出现超调现象,可以逐步增大P参数,直到超调现象消失。
- 如果系统响应较慢,可以逐步减小P参数,直到系统能够快速达到期望值。
需要注意的是,P参数的调节通常是一个迭代的过程,需要多次试验和调整,以找到最适合系统的参数。
4. 步骤二:调节I参数I参数是积分时间参数,用于消除系统静差。
当I参数过大时,系统可能会产生积分饱和现象;当I参数过小时,系统的静差可能无法完全消除。
为了调节I参数,可以按照以下步骤进行: - 将I参数设定为一个较小的值,例如0.001。
- 观察系统的静差情况,如果系统的输出与期望值之间存在较大的差异,说明静差未能完全消除。
- 如果系统存在静差,可以逐步增大I参数,直到静差消失。
【免费下载】如何使用 S7 1200 PID功能
客户问题1:客户使用S7-1200 PID程序块,使用的反馈值是INPUT ,启动自整定后出现输入值超出设定范围错误,无法启动自整定功能。
解答:经过与用户多次交流,发现问题是存储器地址冲突:客户使用了INPUT输入变量,经过模拟量输入处理程序标定上限为:100.0,下限为:0.0。
分配的存储地址是MD516,在客户的程序内容还使用了MW516,MD518地址。
导致地址冲突,修改MD516数据,使MD516存储器保存的数据大于100.0,当启动自整定时,出现输入值超出设定范围错误。
扩展知识1. MD516 包括4个字节:MB516 ,MB517,MB518,MB519,当使用MD516寄存器,其他程序不能使用MB516,MB517,BM518,MB519。
否则,导致地址冲突,保存数据被修改或丢失。
在S7-200的M区和V 区;S7-300/S7-400的M区都需要注意此问题。
2. S7-1200 PID的两个反馈数据INPUT/INPUT-PER区别,以及与Setpoint的关系。
INPUT是现场仪表测量数据,经过程序标定转换成实际工程量数据。
数据类型是实数。
INPU-PER是现场仪表数据直接经过模拟量通道进行测试,未进行数据标定,数据类型是WORD。
可以通过PID组态直接进行数据标定,转换成实际工程量。
推荐使用此方法。
Setpoint:设定值,PID系统通过调解输出设备,使反馈值与设定值相等。
设置范围即是反馈值标定的上下限。
3. Output,Output_PER, Output-PWM区别,这三个信号全是输出信号,Output与Output_Per是一组,Output输出是一个百分比数,即0%~100%,指控制设备全关或全开。
Output_Per直接输出至模拟量通道,输出整数0~27648Output_Pwm输出是脉宽信号,开关量输出,与上面两个信号不相同,单独使用。
建议的组态过程:如图1 程序块图1如图2 基本参数配置反馈与输出配置图2如图3 反馈数据标定图3客户问题2:如何启动S7-1200的自整定,客户的设定值与反馈值过于接近,无法使用“启动自整定”解答:当您的系统各部分已经准备完毕,可以使用自整定,自整定功能只是系统将自动优化或计算PID参数,是调试的一种方法,正常运行时,不必运行自整定调试程序。
S7-1200 PLC的PID工艺功能
5.1 模拟量闭环控制系统——PID控制的优点
不需要被控对象的数学模型 结构简单,容易实现 有较强的灵活性和适应性 使用方便
5
5.2 PID控制器的数字化
sp(n) e(n)
+-
pv(n)
PID M(n) 调节器
D/A
A/D
M(t) 执行 机构
pv(t) 变送 器
被控 c(t) 对象
测量 元件
7
5.3 PID_Compact指令——生成一个新项目 1/2
添加一个PLC设备,将硬件目录中的AO信号板托到CPU中,设 置其输出为10V电压:
8
5.3 PID_Compact指令——生成一个新项目 2/2
集成的模拟量输入的0号通道的量程为默认的010V:
9
5.3 PID_Compact指令——生成循环中断组织块
为了设置PID的高级参数,打开项目树中的文件夹“\PLC_1\工 艺对象\PID_DB”,双击“组态”,打开PID_Compact对象;或 者点击PID_Compact指令右上角的 图标,也可打开PID组态 对话框。
运行时如果输入值超过设置的上限值或低于下限值,指令的bool 输出参数“InputWarning_H”或“InputWarning_L”将变为1.
3
5.1 模拟量闭环控制系统——负反馈
闭环控制必须保证系统是负反馈,如果系统接成了正反馈,将会 失控,被控量会往单一方向增大或减小,给系统的安全带来极大 的威胁。
闭环控制系统的反馈极性与很多因素有关,例如因为接线改变了 变送器输出电流或输出电压的极性,或改变了位移传感器(编码 器)的安装方向,都会改变反馈的极性。 可以用下述方法来判断反馈的极性:在调试是断开D/A转换器和 执行机构之间的连线,在开环状态下运行PID控制程序。控制器 中有积分环节,因为反馈被断开了,不能消除余差,D/A转换器 的输出电压会向一个方向变化。这时如果接上执行器,能减小误 差,则为负反馈,反之为正反馈。
PID的调节方法
PID的调节方法打开今日头条,查看更多精彩图片1. PID调试步骤没有一种控制算法比PID调节规律更有效、更方便的了。
现在一些时髦点的调节器基本源自PID。
甚至可以这样说:PID调节器是其它控制调节算法的吗。
为什么PID应用如此广泛、又长久不衰?因为PID解决了自动控制理论所要解决的最基本问题,既系统的稳定性、快速性和准确性。
调节PID的参数,可实现在系统稳定的前提下,兼顾系统的带载能力和抗扰能力,同时,在PID调节器中引入积分项,系统增加了一个零积点,使之成为一阶或一阶以上的系统,这样系统阶跃响应的稳态误差就为零。
由于自动控制系统被控对象的千差万别,PID的参数也必须随之变化,以满足系统的性能要求。
这就给使用者带来相当的麻烦,特别是对初学者。
下面简单介绍一下调试PID参数的一般步骤:1.负反馈自动控制理论也被称为负反馈控制理论。
首先检查系统接线,确定系统的反馈为负反馈。
例如电机调速系统,输入信号为正,要求电机正转时,反馈信号也为正(PID算法时,误差=输入-反馈),同时电机转速越高,反馈信号越大。
其余系统同此方法。
2.PID调试一般原则a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分时间常数Ti。
c.在输出不振荡时,增大微分时间常数T d。
3.一般步骤a.确定比例增益P确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。
输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。
比例增益P调试完成。
b.确定积分时间常数Ti比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。
PID调节参数及方法
PID调节参数及方法PID(比例-积分-微分)调节是一种常用的自动控制器设计方法,广泛应用于各种控制系统中。
其基本原理是根据控制对象的反馈信号来计算出输出信号,从而使控制对象的输出尽可能接近设定值。
PID控制器的参数包括比例系数Kp、积分时间Ti和微分时间Td。
下面将分别介绍这些参数的调节方法以及应用案例。
1.比例系数Kp的调节方法:比例系数Kp用于调节控制器对误差的响应速度。
Kp越大,控制器对误差的响应越快,但也容易导致系统的超调和震荡。
调节Kp时可以采用试控制法,逐渐增大Kp并观察系统的响应情况,直到系统出现超调或不稳定为止,然后适当减小Kp的值。
2.积分时间Ti的调节方法:积分时间Ti用于调节控制器对系统稳态误差的补偿能力。
增大Ti可以减小系统的稳态误差,但也容易导致系统的超调和震荡。
调节Ti时可以采用试控制法,逐渐增大Ti并观察系统的响应情况,直到系统出现超调或不稳定为止,然后适当减小Ti的值。
3.微分时间Td的调节方法:微分时间Td用于调节控制器对系统的动态响应速度。
增大Td可以提高系统的快速响应能力,但也容易导致系统的超调和震荡。
调节Td时可以采用试控制法,逐渐增大Td并观察系统的响应情况,直到系统出现超调或不稳定为止,然后适当减小Td的值。
同时,还有一些常用的PID调节方法:- Ziegler-Nichols 法:通过实验步骤进行参数调节,包括确定比例放大倍数Ku、临界周期Tu和临界增益Kc,然后根据不同的控制对象类型选择合适的参数调整方法。
- Chien-Hrones-Reswick(CHR)法:通过建立传递函数模型,根据系统的特性分析参数调节方法,适用于非线性和时变系统。
-直接数值调整法:根据经验公式直接对参数进行调整,例如根据系统的响应时间、超调量等指标进行调整。
下面是一个PID调节的应用案例:假设有一个温度控制系统,通过调节加热器的功率来控制目标温度。
系统的传递函数为:G(s)=K/(Ts+1)根据实验数据,目标温度为100°C,实际温度为87°C,采样时间为0.1秒。
S7-1200的被控仿真对象PID自整定过程
S7-1200的被控仿真对象PID自整定过程S7-1200的PID控制支持通过系统自整定方式得出合适的PID参数,下面我们以PID_Compact指令结合被控仿真对象为例,通过若干张图呈现这一自整定过程,自整定包括预调节和精确调节两步。
(1)添加循环中断OB,因为PID指令块一定要放在循环中断块内调用,确保PID运算以固定的采样周期完成,如图1所示。
图1:添加循环中断OB30(2)从右侧指令>工艺>PID控制里面选择PID_Compact指令,也可从工艺对象里添加,可通过指令块图标直接进入到组态/调试窗口,如图2所示。
图2:PID_Compact指令块(3)进入工艺对象组态窗口进行相关设置,因为被控对象仿真,Input/Output选项卡设定下就可以了,其他按默认不予考虑,如图3所示。
图3: Input/Outpu参数设置(4)对PID指令块管脚添加相关变量,如图4所示。
图4:给PID指令块管脚添加变量(5)从全局库添加PID被控对象仿真块到循环OB中,该仿真块可以从西门子全球技术资源下载,条目号79047704,如图5所示。
图5:调用被控对象仿真块(6)PID的输出值作为被控仿真对象的输入,被控仿真对象的输出作为PID的反馈值,如图6所示。
图6:被控对象仿真块管脚变量(7)下载程序到PLC并进入调试(自整定)界面,先启动测量,此时预调节条件还未满足,如图7所示。
图7:进入到工艺对象PID调试面板(8)满足预调节主要条件1:设定值-当前值>(过程值上限-过程值下限)×30%,设定值-当前值>设定值×50%,如图8所示。
图8:修改设定值来满足预调节条件(9)满足预调节主要条件2,PID必须处于“未激活”、“手动”、或“自动”模式,如图9所示。
图9:PID已在手动模式(10)启动预调节,如图10所示。
图10:预调节开始(11)预调节结束并上传参数,如图11所示。
pid参数调节方法
pid参数调节方法嘿,咱今天就来唠唠这个 pid 参数调节方法!这可是个相当重要的事儿啊!你想啊,pid 就像是一个精密仪器的调节旋钮,调得好那就是如鱼得水,一切都顺顺当当;调不好,那可就麻烦啦,就好比一辆车开起来磕磕绊绊的。
先来说说比例环节,这就像是给系统注入了一股活力。
比例系数大了,反应那叫一个迅速,稍有风吹草动,系统立刻就有大动作,就跟急性子似的;可要是比例系数太小呢,系统就像个慢性子,半天都没啥反应,那能行嘛!积分环节呢,就像是个记忆大师,它能把过去的误差都积累起来。
积分时间长了,它就会对过去的事儿念念不忘,系统可能就会变得过于敏感;积分时间太短,又好像记性不太好,过去的事儿都不咋在意,那也不行啊!微分环节呢,就像是个能预测未来的高人。
微分时间长了,它对未来的预测就太夸张了,可能会瞎指挥;微分时间太短,又好像没啥预测能力,起不到啥大作用。
那怎么调节呢?这可得有点耐心和技巧啦!就像做饭一样,调料放多放少得慢慢试。
先从比例系数开始,一点点地增加或减少,看看系统的反应,是不是变得更稳定了呀。
然后再考虑积分和微分,就跟搭配衣服似的,得找到最合适的组合。
比如说,系统老是震荡,那是不是比例系数太大啦?或者积分时间太长啦?这时候就得试着调调,把比例系数减小一点,或者把积分时间缩短一点。
再比如,系统反应太慢,半天都没个动静,那是不是比例系数太小啦?或者微分时间太短啦?那就得想办法让它活跃起来呀。
你看,这 pid 参数调节是不是很有讲究啊!这可不是随随便便就能调好的。
得像对待宝贝一样,细心呵护,慢慢琢磨。
咱可不能小瞧了这 pid 参数调节,它可是关系到整个系统的运行效果呢!要是调得好,系统就能高效稳定地工作,就跟一个优秀的运动员一样,发挥出色;要是调不好,那可就麻烦咯,就像一个生病的人,浑身不自在。
所以啊,大家在调节 pid 参数的时候,可一定要多花点心思,多试试不同的组合,找到最适合的那一组参数。
这可真是个技术活,也是个有趣的挑战呢!加油吧,相信你一定能调好 pid 参数,让系统变得超级棒!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.S7 1200 PLC PID参数翻译
i_Mode : pid 控制器模式(Int)0:未激活1:预调节2:手动精确调节3:自动模式4:手动模式。
i_ModeOld:
i_SveModeByEnMan:
i_StateOld:
r_Ctrl_Gain:比例增益(Real)
r_Ctrl_Ti:积分作用时间(Real)
r_Ctrl_Td:微分作用时间(Real)
r_Ctrl_A:
r_Ctrl_B:
r_Ctrl_C:
r_Ctrl_Cycle:PID算法采样时间(Real)
2 . PID参数输入输出参数
Setpoint:设定值(Real)
Input:过程值实测值(Real)
Input_PER:模拟量过程值(Word)
Output:输出值(Real)
Output_PER:模拟量输出值(Word)
Output_PWM:脉冲宽度输出值(Bool)
ManualEnable:手动模式
ManualValue:手动输出值
Reset:复位PID控制器
b_InvCtrl:取反逻辑
3.PID调试方法:
a.设定一个比较大的积分时间,比较小的微分作用时间, 比例由小到大,到曲线发生振
荡。
调小比例使曲线相对平稳。
b.--调小积分到消除静态误差,使曲线趋于平稳。
c.--干扰系统,使其产生动态误误差,观察系统抑制误差能力是否达标,抑制能力弱,
放大微分作用时间或者比例增益,使其抑制能力增强。
比例作用:加快系统反应速度,有利于抑制动态误差,太强会过调,曲线震荡,太小动态误差抑制能力弱。
积分作用:消除静态误差,使曲线趋于平稳
微分作用:感知曲线变化趋势,提前启动调节,太大不利于曲线平稳,太小动太误差抑制能力弱。
4. S7-1200 PID程序:
循环中断组织块调用工艺指令PID_Compact
必须在循环中断调用PID_Compact
组态PID参数在这以百分比示例设定值过程值输出值都为0-1 之间数值
过程值转换为0-1之间数值
设定值转换为0-1之间数值
输出值标准化为0-1之间数值
输出值比例放大最终作用到比例阀
PID调试面板可以很方便助你确认PID参数先预调节完成再精确调节上传参数
把比例参数积分参数微分参数循环参数做到上位机可调整。