《过程控制》课后习题答案
过程与控制部分课后题答案

(2)什么是过程控制系统?试用方框图表示其一般组戒。
答:过程控制系统:一般定指工业生产过程中自动控制系统的变量是温度、压力.流量、液位、成份等这样一些变量的系统。
过程控制系统的一般性框图如图1-1所示^(3)单元组合式仪表的统一信号是如何规定的?答:各个单元模块之问用统一的标准信号进行脫络。
1)模拟仪表的信号:气动0.02 '0. IMPa;电动III型:4~20mADC或1 ~5V DC。
(4)试将图卜2加热炉控制系统流程图用方框图表示。
答:加热炉控制系统流程图的方框图如图1-3所示:图1-2加热炉过程控制系统流程(5)过程控制系统的单项性能指标有哪些?各自是如何定义的?答:I)单项性能指标主要有:衰减比、超调量与最大动态偏差、棘差.调节时问、振荡频率.上升时问和峰值时问等。
2)各自定义为:衰减比:等于两个相邻的同向波峰值之比m超调量。
:第一个波峰值儿与最终穩态值y(°°)之比的百分数: a = ^^xl00%y(oo)最大动态偏差A:在设定值阶跃响应中,系统过渡过程的第一个峰值超出稳态值的幅度:静差,也称残余偏差C:过渡过程结束后,被控参数所达到的新穩态值y (8)与设定值之问的偏差C称为残余偏差,简称残差:调节时问・:系统从受干扰开始到被控量进入新的稳态值的±5%(±2%)围所需要的时问;振荡频率过渡过程中相邻两同向波峰(或波谷)之问的时问问隔叫振荡周期或工作周期,其倒数称为振荡频率;上升时问°:系统从干扰开始到被控量达到最大值时所需时问;峰值时问一:过渡过程开始至被控参数到达第一个波峰所需要的时问。
(9)两个流量控制系统如图卜4所示。
试分别说明它们是属于什么系统?并画出各自的系统框图。
图1-4两个流量控制回路示意图答:系统1是前馈控制系统,系统2是反馈控制系统。
系统框图如图卜5如下:热油出口火嘴I—©卜-T燃汕©--©-I图1・3•加热炉过程控制系统涼程方框图•,2)数字式仪表的信号:无统一标准。
过程控制复习要点和习题答案(3,4)
第三章调节器1.掌握P、PI、PD,PID调节的特点,各调节规律定义公式,其阶跃响应。
积分时间的大小相应的积分作用怎样微分时间的大小其作用怎样比例度如何求取2.无扰动切换是指什么3.了解微分先行的PID算法主要用于解决什么问题对什么有微分作用4.了解比例先行的PID算法有什么特点5.掌握PID微分方程及差分方程6.掌握调节器的正反作用判断。
执行器7.掌握解执行器的作用、类型、由哪两部分组成各部分的作用是什么8.了解气动执行器和电动执行器各有什么特点9.掌握什么是气开阀,什么是气关阀。
按什么原则、如何来选择气开或气关方式10.掌握调节阀流量特性的定义;理想流量特性的定义、分类和特点;11.工作流量特性的定义,串联管道中调节阀流量特性的变化12.S值是指什么S值的大小对流量特性的影响13.掌握选择调节阀的流量特性的三原则14.了解电-气转换器起什么作用为什么要用阀门定位器15.掌握构成一个安全火花型防爆系统的充要条件是什么安全火花型防爆系统的组成结构。
16.了解防爆栅有哪几种类型17.了解危险场所分为哪几类危险程度最高的是哪一类第一类危险场所又分为哪几级第四章控制对象的特性测试1.掌握利用机理法建立单容/双容对象的数学模型。
2.掌握什么是具有自衡能力的对象具有滞后的一阶二阶特性的表示式;什么是无自衡能力的对象具有滞后的一阶二阶特性的表示式。
3.掌握什么是飞升曲线单容对象或多容对象的飞升曲线可用哪些参数来表征4.掌握如何测定飞升曲线和方波响应曲线测得方波响应曲线后如何获得飞升曲线(获取飞升曲线的原理和方法)。
5.掌握由飞升曲线来确定一阶对象,了解确定二阶对象的传递函数的方法。
6.掌握测定对象动特性的方法分类第三次作业(P108)1(2)某比例积分调节器的输入,输出范围均为4~20mA DC,若设ó=100%,T1=2MIN,稳态时其输出为6mA,若在某一时刻输入阶跃增加1mA,试求经过4min后调节器的输出。
孙洪程版过程控制课后答案
第一章思考题及习题1.1何谓控制通道?何谓干扰通道?它们的特性对控制系统质量有什么影响?答:所谓“通道”,就是某个参数影响另外一个参数的通路,这里所说的控制通道就是控制作用(一般的理解应当是控制器输出)U(s)对被控参数Y(s)的影响通路(一般的理解是控制作用通过执行器影响控制变量,然后控制变量通过被控对象再影响被控参数,即广义对象上的控制通道)。
同理,干扰通道就是干扰作用F(s)对被控参数Y(s)的影响通路。
干扰通道的特性对控制系统质量影响如下表所示。
控制通道的特性对控制系统质量影响如下表所示1.2如何选择控制变量?答:① 所选控制变量必须是可控的。
② 所选控制变量应是通道放大倍数比较大者,最好大于扰动通道的放大倍数。
③ 所选控制变量应使扰动通道时间常数越大越好,而控制通道时间常数应适当小一些为好,但不易过小。
④ 所选控制变量其通道纯滞后时间应越小越好。
⑤ 所选控制变量应尽量使干扰点远离被控变量而靠近控制阀。
⑥ 在选择控制变量时还需考虑到工艺的合理性。
一般来说,生产负荷直接关系到产品的产量,不宜经常变动,在不是十分必要的情况下,不宜选择生产负荷作为控制变量1.3控制器的比例度δ变化对控制系统的控制精度有何影响?对控制系统的动态质量有何影响?答:当G c(s)=K c时,即控制器为纯比例控制,则系统的余差与比例放大倍数成反比,也就是与比例度δ成正比,即比例度越大,余差也就越大。
K c增大、δ减小,控制精度提高(余差减小),但是系统的稳定性下降。
1.4 4:1衰减曲线法整定控制器参数的要点是什么?答:衰减曲线法是在系统闭环情况下,将控制器积分时间T i放在最大,微分时间T d放在最小,比例度放于适当数值(一般为100%),然后使δ由大往小逐渐改变,并在每改变一次δ值时,通过改变给定值给系统施加一个阶跃干扰,同时观察过渡过程变化情况。
如果衰减比大于4:1,δ应继续减小,当衰减比小于4:1时δ应增大,直至过渡过程呈现4:1衰减时为止。
过程控制习题课

测量变送器和执行器与控制器(续)
题1:定值控制系统的过渡过程有几种形式?工程上一般要求为哪种过渡过程形式? 随动系统一般要求为哪种过渡过程形式? 答:五种,分别是:非周期发散过程、非周期衰减过程、发散振荡过程、等幅振荡 过程、衰减振荡过程等。 工程上一般要求为衰减振荡的过渡过程形式。随动系统一般要求为单调过程。 题2:一生产过程,被控对象为一阶特性,控制器为纯比例控制器,控制中还是发 生了衰减振荡过程?为什么?
Q2
R3
dh Q1 Q2 Q3 A dt R2 R3 h H s Wo ( s ) Q2 R2 Q1 s AR2 R3 s R2 R3 h Q3 R3
过程动态特性及建模(续)
R1 Q1
题2: (1) 列写过程微分方 程组;
h1 h2 Q12 R12
Q2
R2
将流量方程代入物料平衡方程, 即得到过程状态方程
过程动态特性及建模(续)
dh1 C1 Q1 Q2 Q12 , dt dh2 C2 Q12 Q3 dt h h Q2 1 , Q3 2 , R2 R3
h1 h2 Q12 R12
H1 ( s ) 1 Q1 (s) Q2 (s) Q12 (s), C1s
1 Q12 (s) Q3 (s) H 2 ( s) C2 s
H1 ( s ) H 2 ( s) Q2 ( s) , Q3 ( s) , R2 R3 H1 ( s ) H 2 ( s ) Q12 ( s) R12
5 如图所示为蒸汽加热器控制系统,若被控对象控制通道的传递函数为 Go s 7s 4 调节阀的传递函数为 GV s 1 控制器TC的传递函数为 GC s 1
过程控制系统与仪表习题答案---第三章
第3章习题(xítí)与思考题3-1 什么(shén me)是控制器的控制规律?控制器有哪些基本控制规律?解答(jiědá):1)控制(kòngzhì)规律:是指控制器的输出(shūchū)信号与输入偏差信号之间的关系。
2)基本控制规律:位式控制、比例控制、比例积分控制、比例微分控制和比例积分微分控制。
3-2 双位控制规律是怎样的?有何优缺点?解答:1)双位控制的输出规律是根据输入偏差的正负,控制器的输出为最大或最小。
2)缺点:在位式控制模式下,被控变量持续地在设定值上下作等幅振荡,无法稳定在设定值上。
这是由于双位控制器只有两个特定的输出值,相应的控制阀也只有两个极限位置,总是过量调节所致。
3)优点:偏差在中间区内时,控制机构不动作,可以降低控制机构开关的频繁程度,延长控制器中运动部件的使用寿命。
3-3 比例控制为什么会产生余差?解答:产生余差的原因:比例控制器的输出信号y与输入偏差e之间成比例关系:为了克服扰动的影响,控制器必须要有控制作用,即其输出要有变化量,而对于比例控制来讲,只有在偏差不为零时,控制器的输出变化量才不为零,这说明比例控制会永远存在余差。
3-4 试写出积分控制规律的数学表达式。
为什么积分控制能消除余差?解答:1)积分控制作用的输出变化量y 是输入偏差e 的积分:2)当有偏差存在(c únz ài)时,输出信号将随时间增大(或减小)。
当偏差为零时,输出停止变化,保持在某一值上。
因而积分控制器组成控制系统可以到达无余差。
3-5 什么是积分(j īf ēn)时间?试述积分时间对控制过程的影响。
解答(ji ěd á):1)⎰=edt T y 11 积分时间是控制器消除偏差的调整时间,只要有偏差存在,输出信号将随时间增大(或减小)。
只有(zh ǐy ǒu)当偏差为零时,输出停止变化,保持在某一值上。
自动化仪表与过程控制部分课后习题答案
绪论0-1自动化仪表:是由若干自动化元件构成的,具有较完善功能的自动化技术工具单元组合式调节仪表: 由具有不同功能的若干单元仪表按调节系统具体要求组合而成的自动调节仪表0-2 P5 第二段0-3 P5~60-4 一般选用相对误差评定,看相对百分比,相对误差越小精度越高x/(100+100)=0.5% x=1摄氏度1-4定义:第十五页第二段工业上会出现共模干扰是因为现场有动力电缆,形成强大的磁场。
造成信号的不稳。
共模干扰是同时叠加在两条被测信号线上的外界干扰信号,是被测信号的地和数字电压表的地之间不等电位,由两个地之间的电势即共模干扰源产生的在现场中,被测信号与测量仪器间相距很远。
这两个地之间的电位差会达到几十伏甚至上百伏,对测量干扰很大使仪表不能正常工作有时会损坏仪表共模干扰在导线与地(机壳)之间传输,属于非对称性干扰,共模干扰幅度大、频率高、还可以通过导线产生辐射,所造成的干扰较大。
消除共模干扰的方法包括:(1)采用屏蔽双绞线并有效接地(2)强电场的地方还要考虑采用镀锌管屏蔽(3)布线时远离高压线,更不能将高压电源线和信号线捆在一起走线(4)不要和电控锁共用同一个电源(5)采用线性稳压电源或高品质的开关电源(纹波干扰小于50mV)1-6硅:被测介质的压力直接作用与传感器的膜片上,使膜片产生与介质压力成正比的微位移,使传感器的电阻值发生变化,用电子线路检测这一变化,并转换输出一个对应与这一压力的标准测量信号。
差:电容式压力变送器主要由完成压力/电容转换的容室敏感元件及将电容转换成二线制4-20mA电子线路板构成,当进程压力从从测量容室的两侧(或一侧)施加到隔离膜片后,经硅油灌充液传至容室的重心膜片上,重心膜片是个边缘张紧的膜片,在压力的作用下,发生对应的位移,该位移构成差动电容变化,并经历电子线路板的调理、震荡和缩小,转换成4-20mA信号输入,输入电流与进程压力成反比。
优点:他们不存在力平衡式变送器必须把杠杆穿出测压室的问题1-9 1、热导分析仪的工作原理热导式气体分析仪多采用半导体敏感元件与金属电阻丝作为热敏元件,将其与铂线圈烧结成一体,而后与对气体无反应的补偿元件,共同形成电桥电路,也就是热导式气体分析仪的测量回路,对热导系数进行测量。
(完整版)过程控制习题与答案
(完整版)过程控制习题与答案第1章绪论思考题与习题1-1 过程控制有哪些主要特点?为什么说过程控制多属慢过程参数控制?解答:1.控制对象复杂、控制要求多样2. 控制⽅案丰富3.控制多属慢过程参数控制4.定值控制是过程控制的⼀种主要控制形式5.过程控制系统由规范化的过程检测控制仪表组成1-2 什么是过程控制系统?典型过程控制系统由哪⼏部分组成?解答:过程控制系统:⼀般是指⼯业⽣产过程中⾃动控制系统的变量是温度、压⼒、流量、液位、成份等这样⼀些变量的系统。
组成:控制器,被控对象,执⾏机构,检测变送装置。
1-3简述被控对象、被控变量、操纵变量、扰动(⼲扰)量、设定(给定)值和偏差的含义?解答:被控对象⾃动控制系统中,⼯艺参数需要控制的⽣产过程、设备或机器等。
被控变量被控对象内要求保持设定数值的⼯艺参数。
操纵变量受控制器操纵的,⽤以克服扰动的影响,使被控变量保持设定值的物料量或能量。
扰动量除操纵变量外,作⽤于被控对象并引起被控变量变化的因素。
设定值被控变量的预定值。
偏差被控变量的设定值与实际值之差。
1-4按照设定值的不同形式, 过程控制系统可分为哪⼏类?解答:按照设定值的不同形式⼜可分为:1.定值控制系统定值控制系统是指设定值恒定不变的控制系统.定值控制系统的作⽤是克服扰动对被控变量的影响,使被控变量最终回到设定值或其附近.以后⽆特殊说明控制系统均指定值控制系统⽽⾔.2.随动控制系统随动控制系统的设定值是不断变化的.随动控制系统的作⽤是使被控变量能够尽快地,准确⽆误地跟踪设定值的变化⽽变化3.程序控制系统程序控制系统的设定值也是变化的,但它是⼀个已知的时间函数,即设定值按⼀定的时间程序变化。
1-5 什么是定值控制系统?解答:在定值控制系统中设定值是恒定不变的,引起系统被控参数变化的就是扰动信号。
1-6 什么是被控对象的静态特性?什么是被控对象的动态特性?为什么说研究控制系统的动态⽐其静态更有意义?解答:被控对象的静态特性:稳态时控制过程被控参数与控制变量之间的关系称为静态特性。
王福利过程控制系统课后题答案
王福利过程控制系统课后题答案1、什么是对象特性?为什么研究对象特性对象的输入变量和输出变量之间的定量关系;它使人们能更深刻的认识自动控制的本质,从而能采取有效措施提高控制质量。
2、何为对象的数学模型?静态数学模型与动态数学模型有哪些区别?在输入(控制输入与扰动输入)作用下,其状态和输出(被控参数)变化的数学表达式;前者是在输入变量与输出变量达到平衡状态时建立的数学表达式,后者是在输出变量和状态变量在输入变量影响下建立的数学表达式。
3、建立对象的数学模型有什么重要意义?1设计过程控制系统与整定控制参数;2指导生产工艺与其设备的设计与操作;3对被控过程进行仿真研究;4培训运行操作人员;5工业过程的故障检测与诊断。
4、建立数学模型的方法:机理建模和实验建模5、为什么不同的过程特性与工艺要求需设计不同的控制方案?怎样理解被控过程特性是过程控制系统设计的基础?过程控制系统的过程设计正确与否,直接影响到系统能否正常投入运行,因此要求过程控制设计人员必须根据生产过程的特点,工艺特性和生产操作的规律,正确运用控制理论,设计一个正确合理的控制方案;过程控制系统的设计首先要根据工艺要求和控制目标确定系统变量,进一步根据被控过程特性用恰当的数学关系式,即所谓的数学模型来描述被控过程的变量之间的关系,只有掌握了被控过程的数学模型才能深入的分析过程的特性和选择正确的控制方案。
6。
什么叫单回路系统?控制方案设计包括哪些内容?怎样理解方案设计是系统设计的核心?只有一个闭环回路的简单控制系统叫单回路控制系统;过程控制系统设计包括系统的方案设计,工程设计,工程安装和仪表调校,调节器参数整定四个主要内容;控制方案是系统设计得核心,若控制方案不正确,则无论如何选用何种先进的过程控制仪表或计算机系统,无论其安装如何细心,都不可能是系统在工业生产过程中发挥良好的控制作用,甚至系统不能运行。
7。
什么是直接参数与间接参数?他们有何关系选择被控参数应遵循哪些基本原则?直接参数,直接反应生产过程中产品质量和产量又以直接测量的参数间接参数,间接反映产品质量和产量又与直接参数有着单值函数关系,有足够大的测量灵敏度的参数间接参数必须与直接参数有单值函数关系被控参数的选择原则:1)直接参数法2)间接参数法3)被控变量必须具备足够的灵敏度和变化数值4)被控变量的选择必须考虑到工艺过程的合理性,经济性,以与国内外仪表生产的现状。
过程控制复习要点和习题答案(3,4)
17。95
18。1
画图并求得
•t=0:20:400;
•h1=[0,0.2,0.8,2。0,3。6,5。4,7.4,9。3,11,12。6,13.6,14.4,15。1,15.8,16。4,
17,17.4,17.6,17。8,17.95,18。1];
•h=h1/0。2;
x2(t)= —x1(t-Δt)
y(t)=y1(t)+y2(t)
=y1(t)-y1(t-Δt)
t
0
20
40
60
80
100
120
140
160
180
200
220
240
260
280
h1
0
0。2
0.8
2.0
3.6
5.4
7。4
9。3
11
12。6
13。6
14.4
15。1
15。8
16。4
300
320
340
360
380
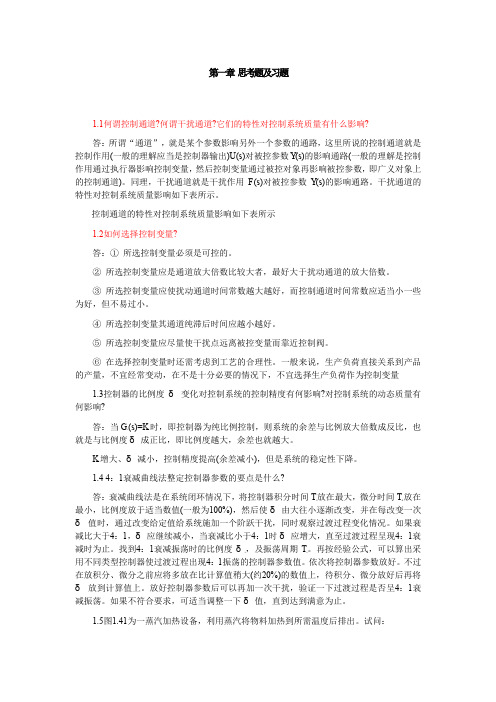
2(5)如图所示,冷物料通过加热器用蒸汽对其加热。在事故状态下,为了保护加热器设备的安全,即耐热材料不被损坏,现在蒸汽管道上有一个气动执行器,试确定其气开,气关形式,并画出由PID调节器构成的控制系统结构框图。
解:为了保护加热设备的安全,应该选择气开阀.
(6)现测得三种流量特性的有关数据见表。试分别计算其相对开度在10%,50%,80%各变化10%时的相对流量的变化量,并据此分析它们对控制质量的影响和一些选用原则.
液位h为输出变量进水流量qi为输入变量111idhaqqdt?????111hqr???2212dhaqqdt?????223hqr???12211122111iqshsrgsqsqsarsars??????2101104222121ishkqtgses??????????????121oofoorgsgsrfs???干扰通道特性对控制质量的影响当干扰是幅值为f的阶跃信号6
过程控制与自动化仪表_第二版_课后答案__机械工业出版社_(潘永湘_杨延西_赵跃_编着_着)
7.992 Y (s ) = 2 F ( s ) 12.5s + 2.5s + 11.96
⎧ ⎪Y1 ( s ) = G ( s ) ⋅ F1 ( s ) ⎪ ⎨Y2 ( s ) = G ( s ) ⋅ F2 ( s ) ⎪ 7.992 10 79.92 ⎪TF = ∆Y = Y1 − Y2 = G ( s )( F1 − F2 ) = G ( s ) ⋅ ∆F = ⋅ = 2 3 ⎩ 12.5s + 2.5s + 11.96 s 12.5s + 2.5s + 11.96s
ρ=
3.(1) 解: 1、 被控参数:热水温度 2、 控制参数:蒸汽流量 3、 测温元件及其变送器选择:选取热电阻,并配上相应温度变送器。 4、 调节阀的选择:根据实际生产需要与安全角度的考虑,选择气开阀;调节器选 PID 或 PD 类型的调节器;由于调节阀为气开式(无信号时关闭) ,故 K v 为正,当被控过 程输入的蒸汽增加时,水温升高,故 K 0 为正,测量变送 K m 为正,为使整个系统中 各环节静态放大系数乘积为正,调节器 K c 应为正,所以选用反作用调节器。 第 6 章 常用高性能过程控制系统 1.(12) 解: 1)画出控制系统的框图 温度控制器 流量控制器 调节阀 蒸汽管道 再沸器 精馏塔
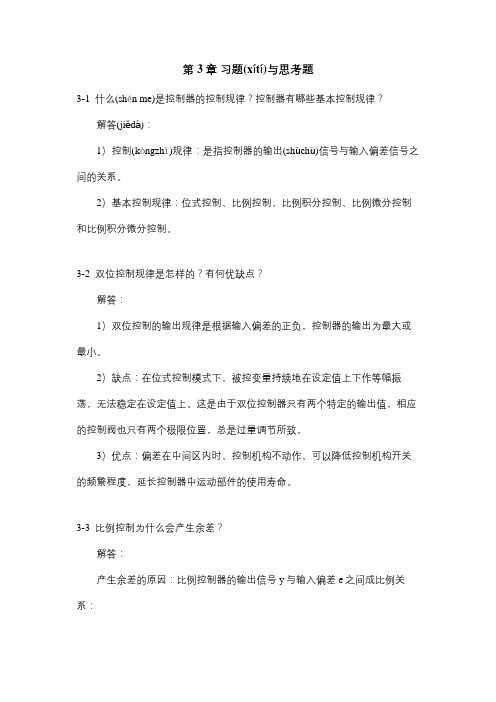
图为液位控制系统由储水箱被控过程液位检测器测量变送器液位控制器调节阀组成的反馈控制系统为了达到对水箱液位进行控制的目的对液位进行检测经过液位控制器来控制调节阀从而调节q1流量来实现液位控制的作用
第一章 绪论 2.(1) 解: 图为液位控制系统,由储水箱(被控过程) 、液位检测器(测量变送器) 、液位控制器、 调节阀组成的反馈控制系统,为了达到对水箱液位进行控制的目的,对液位进行检测,经过 液位控制器来控制调节阀,从而调节 q1 (流量)来实现液位控制的作用。 系统框图如下:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章思考题与习题1.1 下列系统中哪些属于开环控制,哪些属于闭环控制?①家用电冰箱②家用空调器③家用洗衣机④抽水马桶⑤普通车床⑥电饭煲⑦多速电风扇⑧高楼水箱⑨调光台灯开环控制:③家用洗衣机⑤普通车床⑦多速电风扇⑨调光台灯闭环控制:①家用电冰箱②家用空调器④抽水马桶⑥电饭煲⑧高楼水箱1.2 图1-14所示为一压力自动控制系统,试分析该系统中的被控对象、被控变量、操纵变量和扰动变量是什么?画出该系统的框图。
图1-14 压力自动控制系统图1-15 加热炉温度自动控制系统被控对象:容器P被控变量:罐内压力操纵变量:物料输入流量扰动变量:出口流量系统框图如下:1.3 图1-15所示是一加热炉温度自动控制系统,试分析该系统中的被控对象、被控变量、操纵变量和扰动变量是什么?画出该系统的框图。
被控对象:加热炉被控变量:炉内温度操纵变量:燃料流量扰动变量:进料量系统框图如下:1.4 按设定值的不同情况,过程控制系统分为哪几类?过程控制系统分为三类:定值控制系统、随动控制系统和程序控制系统。
1.5 什么是过程控制系统的过渡过程?有哪几种基本形式?过程控制系统从一个平衡状态过渡到另一个平衡状态的过程称为过程控制系统的过渡过程。
控制系统过渡过程有五种基本形式:发散振荡、单调发散、等幅振荡、衰减振荡和单调衰减。
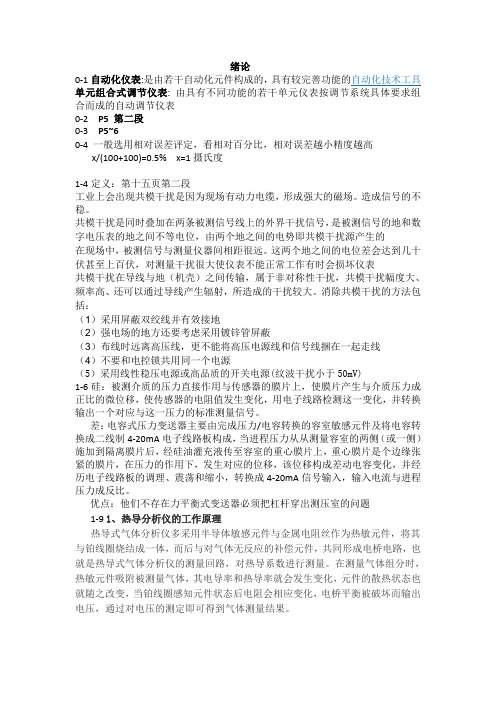
1.6 某换热器的温度控制系统在单位阶跃干扰作用下的过渡过程曲线如图1-16所示。
试分别求出最大偏差、余差、衰减比、振荡周期和调整时间(设定值为200℃)。
图1-16 题1.6图最大偏差:30℃余差:5℃衰减比:5:1振荡周期:15min调整时间:22min第二章思考题与习题2.1 求取图2-55所示电路的传递函数,图中物理量角标i代表输入,o代表输出。
a)b)图2-55 习题2.1图a)(由分压公式求取)上式中,,。
b)上式中,,2.2 惯性环节在什么条件下可近似为比例环节?又在什么条件下可近似为积分环节?惯性环节在T很小的时候可近似为比例环节;T很大的时候条可近似为积分环节。
2.3 一个比例积分环节和一个比例微分环节相连接能否简化为一个比例环节?一个比例积分环节和一个比例微分环节相连接不能简化为一个比例环节。
2.4 化简图2-56a、b、c所示系统的框图,并求取系统的闭环传递函数。
习题2.4图a)a)习题2.4图b )b )R习题2.4图c )c )2.5 已知系统的零极点形式的传递函数如下,试将其输入到MATLAB 的工作空间中,并转换成有理函数形式。
)4)(3)(2()1(10)(++++=s s s s s s G有理函数式:ss s s s s G 242691010)(234++++=2.6 求下列两个传递函数在串联、并联和负反馈连接时的等效传递函数。
321)(21+++=s s s s G 11)(2+=s s G(1)串联时的等效传递函数(2)并联时的等效传递函数()353442232+++++=s s s s s s G (3)负反馈连接时的等效传递函数或2.7已知系统的开环传递函数如下所示,判别各闭环系统的稳定性。
①)11.0(40)(+=s s s G闭环传递函数:401.040)(2++=Φs s s 特征方程:4010)(2++=s s s N特征根:j j s 4.19515552,1±-=-±-= 根的实部为负,系统稳定。
②2100)(ss G =闭环传递函数:100100)(2+=Φs s 特征方程:100)(2+=s s N 特征根:j s 102,1±= 根的实部为0,系统不稳定。
③)11.0()101.0(10)(2++=s s s s G 闭环传递函数:101.01.0101.0)(23++++=Φs s s s s 特征方程:10010)(23+++=s s s s N 特征根:j s 338.02,1±=,s 3=-10.8实根为负,但两个虚根的实部为正,系统不稳定。
)(321)(2++=s s s G 421)(2+++=s s s s G ()()14232)(22+++++=s s s s s s G④)11.0()14.0(10)(2++=s s s s G 闭环传递函数:1041.0104)(23++++=Φs s s s s 特征方程:1004010)(23+++=s s s s N 特征根:j s 5.39.12,1±-=,s 3=-6.1 实根为负,两个虚根的实部为负,系统稳定。
⑤)16.0)(15.0)(14.0()145.0(10)(++++=s s s s s G闭环传递函数:67.9150167.633.835.37)(23++++=Φs s s s s特征方程:67.9150167.6)(23+++=s s s s N 特征根:j s 1.697.12,1±-=,s 3=-2.2 实根为负,两个虚根的实部为负,系统稳定。
2.8 试绘制下列系统的对数频率特性曲线。
①125)(+=s s G 由一个比例环节和一个惯性环节组成。
(1)对数幅频特性的绘制低频段:K=5,()dB K L 14lg 201===ωω,斜率为0dB/dec 。
中高频段:T=2s ,则交接频率ω=0.5rad/s 。
在低频段为0dB/dec 的直线,经ω=0.5rad/s 处,遇一惯性环节,降低20dB/dec ,成为-20dB/dec 的斜线。
(2)对数相频特性的绘制交接频率ω=0.5rad/s 处绘制惯性环节的-45︒位置。
②)5)(2.0(10)(++=s s s G将传递函数整理为)12.0)(15(10)(++=s s s G由一个比例环节和两个惯性环节组成。
(1)对数幅频特性的绘制低频段:K=10,()dB K L 20lg 201===ωω,斜率为0dB/dec 。
中高频段:T 1=5s ,则交接频率ω1=0.2rad/s ;T 2=0.2s ,则交接频率ω2=5rad/s 。
在低频段为0dB/dec 的直线,经ω1=0.2rad/s 处,遇一惯性环节,降低20dB/dec ,成为-20dB/dec 的斜线。
再经ω2=5rad/s 处,再遇一惯性环节,降低20dB/dec ,成为-40dB/dec 的斜线。
(2)对数相频特性的绘制交接频率ω1=0.2rad/s 处绘制第一个惯性环节的-45︒位置。
交接频率ω2=5rad/s 处绘制第二个惯性环节的-135︒位置。
③)10()2.0(25)(2++=s s s s G 将传递函数整理为)11.0()15(5.0)(2++=s s s s G由一个比例环节、一个比例微分环节、一个惯性环节和两个积分环节组成。
(1)对数幅频特性的绘制低频段:K=0.5,()dB K L 6lg 201-===ωω,斜率为-40dB/dec 。
中高频段:T 1=5s ,则交接频率ω1=0.2rad/s ;T 2=0.1s ,则交接频率ω2=10rad/s 。
在低频段为-40dB/dec 的斜线,经ω1=0.2rad/s 处,遇一比例微分环节,增加20dB/dec ,成为-20dB/dec 的斜线。
再经ω2=10rad/s 处,再遇一惯性环节,降低20dB/dec ,成为-40dB/dec 的斜线。
(2)对数相频特性的绘制有两个积分环节,相位从-180︒开始绘制,在交接频率ω1=0.2rad/s 处绘制比例微分环节的-135︒位置。
交接频率ω2=5rad/s 处绘制第二个惯性环节的-135︒位置。
2.9 已知某调节器的对数幅频特性如图2-57所示,试写出该调节器的传递函数。
图2-57 习题2.9图此环节有4个交接频率,分别是:ω1=0.8rad/s(T1=1.25s),ω2=4rad/s(T2=0.25s),ω3=8rad/s(T3=0.125s),ω4=100rad/s (T4=0.01s)。
此环节低频渐近线为0dB/dec 水平线,所以不含积分环节。
另由水平线高度为20dB ,则()dB K L 20lg 201===ωω可得K=10。
因此,由图可得出其传递函数为)101.0)(125.1()1125.0)(125.0(10)1)(1()1)(1()(4132++++=++++=s s s s s T s T s T s T K s G2.10 已知某系统的开环传递函数为())05.01)(125.01)(101()1001(001.022s s s s s s G k ++++=试绘出系统的开环对数幅频特性。
该传递函数由一个比例环节、两个积分环节、两个比例微分环节及三个惯性环节组成。
低频段:K=0.001,()dB K L 60lg 201-===ωω,斜率为-40dB/dec 。
中高频段:T 1,2=100s ,则交接频率ω1,2=0.01rad/s ;T 3=10s ,则交接频率ω3=0.1rad/s ;T 4=0.125s ,则交接频率ω4=8rad/s ;T 5=0.05s ,则交接频率ω5=20rad/s 。
在低频段为-40dB/dec 的斜线,经ω1,2=0.01rad/s 处,遇两个比例微分环节,增加40dB/dec ,成为0dB/dec 的直线。
再经ω3=0.1rad/s 处,再遇一惯性环节,降低20dB/dec ,成为-20dB/dec 的斜线。
再经ω4=8rad/s 处,再遇一惯性环节,降低20dB/dec ,成为-40dB/dec 的斜线。
再经ω5=20rad/s 处,再遇一惯性环节,降低20dB/dec ,成为-60dB/dec 的斜线。
2.11 已知系统框图如图2-58所示,试用开环对数频率特性曲线判断闭环系统的稳定性。
图2-58 习题2.11图)15.025.025.0(10)125.025.0(10)4(40)(222+⨯⨯+=++=++=s s s s s s s s s s G K=10,()dB K L 20lg 201===ωω,有一个积分环节,斜率为-20dB/dec 。
T=0.5s ,交接频率ω=2rad/s ,ξ=0.25。
由开环对数频率特性曲线可知,当L(ω)过0dB 线时,φ(ω)在-180︒线的下方,即γ<0,系统不稳定。
2.12 已知单位负反馈系统的开环传递函数为)15.0)(11.0(10)(++=s s s s G试绘制系统的对数频率特性曲线,并求出幅值穿越频率c ω和相位裕量γ。
K=10,()dB K L 20lg 201===ωω,有一个积分环节,斜率为-20dB/dec 。
T 1=0.5s ,则交接频率ω1=2rad/s ;T 2=0.1s ,则交接频率ω2=10rad/s 。