浅谈汽车四轮驱动系统
四驱系列(一):四驱系统的分类

四驱系列(一):四驱系统的分类我们知道,车厂通常会将自己最骄傲的技术贴在汽车的屁股上,就像以前常见的“ABS”、“ESP”及现在比亚迪的“4.9s”一样。
而我们经常可以在宝马的屁股上看到“xDrive”、奔驰的屁股上看到“4MATIC”、奥迪的屁股上看到“Quattro”,这分别代表了BBA三家各自的四驱技术。
由此可见,四驱是一项非常有技术难度的,可以一定程度上代表车厂研发能力的技术。
一、四驱的定义及分类传统意义上的四驱系统,一般是指将发动机动力传递给四个车轮的传动装置,属于传动系统的一部分。
四驱系统最初安装在卡车和具有越野性能的特殊用途车辆上可用于牵引和运载重物,也能够在包括爬坡在内的任何地形上无障碍地驾驶。
在越野环境下工作时,四轮驱动车通常在低摩擦系数路面上以低速驱动,如灰土地、泥泞地、沙砾地、沙地、冰雪路以及上下坡,汽车能转过障碍物或困难路况倍描述为“机动性”。
除机动性外,四驱系统开发时还需考虑越野路况及正常工况时的操纵稳定性。
随着新能源技术的不断发展,能够实现四轮驱动的技术路径越来越多,四驱系统已逐步超越传动装置这个概念。
目前来说,可以认为能使四个车轮均产生驱动扭矩的系统都可以成为四驱系统。
而根据动力源形式、动力源数量、传动装置结构等因素,可以将四驱系统做如下分类:图 1 四驱系统分类二、机械四驱机械四驱通常匹配传统燃油车(也可匹配新能源车),可分为分时四驱、全时四驱、适时四驱三大类,每类系统具备各自特征和工作模式:1)分时四驱分时四驱系统通常应用在卡车/SUV车上,常见结构如图2所示,核心部件为分动器。
图2 分时四驱系统分时四驱系统通常具备若干不同操作挡位(高挡位、低挡位和空挡位)和模式(两轮和四轮),司机可选择2H、4H、4L和空挡位。
在铺装、干燥路面行驶时,通常使用2H模式。
在2H模式下,仅驱动一个车桥(两轮驱动)。
当需要额外驱动时,如在冰雪路况下行驶,或在相对平坦路面并无特别异常的越野路况下行驶,可选择4H模式。
四驱车工作原理
四驱车工作原理四驱车是一种具有四个驱动轮的汽车,它的工作原理是通过将动力传递到所有四个车轮来提高牵引力和稳定性。
四驱车通常分为全时四驱和手动四驱两种类型。
全时四驱系统是一种自动控制的系统,它可以根据路面情况自动调节前后轮的扭矩分配比例。
当车辆行驶在平坦路面时,系统会将扭矩分配到前后轮各一半,以保持稳定性。
当车辆行驶在崎岖不平的路面时,系统会自动将更多的扭矩传递到那些牵引力更强的轮子上,以提高牵引力和稳定性。
手动四驱系统需要由驾驶员手动控制。
通常情况下,该系统会将扭矩均匀分配给前后轮。
当车辆行驶在崎岖不平或松软的路面时,需要更多的牵引力来克服阻力。
此时,驾驶员可以通过切换到四轮驱动模式来将更多的扭矩传递到所有四个车轮上。
无论是全时四驱还是手动四驱系统,在实现四轮驱动的过程中,都需要使用传动系统。
传动系统通常由发动机、离合器、变速器、传动轴和差速器组成。
发动机是四驱车的动力源,它将燃料燃烧产生的能量转化为机械能。
离合器将发动机输出的扭矩传递给变速器,以控制车辆的速度和加速度。
变速器可以调节发动机输出的扭矩大小和转速,以适应不同路况下的行驶需求。
传动轴连接着前后两个轮组成一个整体,它可以将扭矩从变速器传递到差速器。
差速器是四驱车非常重要的一个组件,它可以使前后轮之间产生不同转速,并且在转弯时允许内外侧轮子产生不同旋转。
这种设计可以提高车辆在弯道行驶时的稳定性和操控性。
总之,四驱车通过将扭矩传递到所有四个车轮来提高牵引力和稳定性。
无论是全时四驱还是手动四驱系统,在实现四轮驱动的过程中都需要使用传动系统,并且差速器是实现这一目标非常关键的一个组件。
汽车的四轮驱动系统的介绍
有多少种四轮驱动车辆就几乎有多少种四轮驱动系统。
似乎每一家制造商都有几种为车轮提供动力的方案。
不同制造商所用的语言有时可能会有点令人迷惑,因此在开始解释车轮驱动的工作原理之前,首先让我们来澄清一些术语:四轮驱动:通常,当汽车制造商说一辆车具有“四轮驱动”时,他们指的是“分时”系统。
就本文而言,这些系统只是针对低牵引力条件,例如越野或在雪地或冰面上行驶。
全轮驱动:这些系统有时被称作“全时四轮驱动”。
全轮驱动系统是为适合在各种类型的路面上(包括公路和越野)行驶而设计的,而且这些系统大多数都不能关闭。
分时和全时四轮驱动系统可以采用相同的标准来评估。
最佳的系统会在每个车轮上施加最恰当的扭矩,也就是说,保持轮胎不会出现打滑时的最大扭矩。
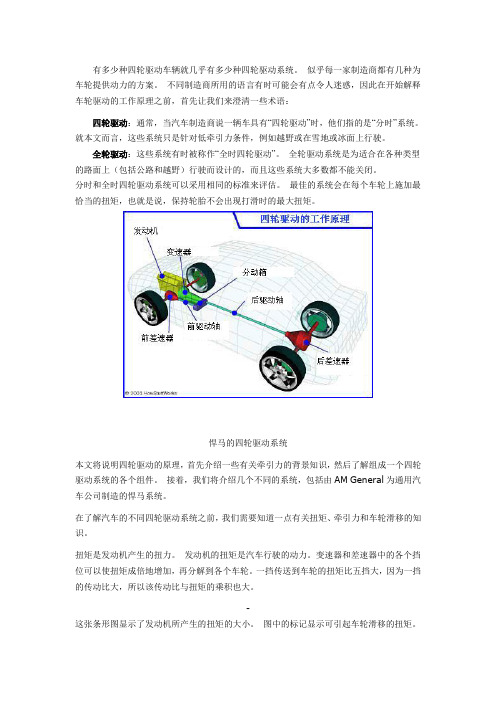
悍马的四轮驱动系统本文将说明四轮驱动的原理,首先介绍一些有关牵引力的背景知识,然后了解组成一个四轮驱动系统的各个组件。
接着,我们将介绍几个不同的系统,包括由AM General为通用汽车公司制造的悍马系统。
在了解汽车的不同四轮驱动系统之前,我们需要知道一点有关扭矩、牵引力和车轮滑移的知识。
扭矩是发动机产生的扭力。
发动机的扭矩是汽车行驶的动力。
变速器和差速器中的各个挡位可以使扭矩成倍地增加,再分解到各个车轮。
一挡传送到车轮的扭矩比五挡大,因为一挡的传动比大,所以该传动比与扭矩的乘积也大。
-这张条形图显示了发动机所产生的扭矩的大小。
图中的标记显示可引起车轮滑移的扭矩。
启动条件良好的汽车的扭矩从不会超过这个值,因此车轮不会打滑;但启动条件差的汽车会超过这一扭矩,因此轮胎会出现打滑。
只要一开始打滑,扭矩就会降到几乎为零。
有趣的是在低牵引力条件下可以产生的最大扭矩量由牵引力的大小而不是发动机决定。
即使您在车上安装了NASCAR发动机,如果轮胎不着地,再强的动力也无法利用。
在本文中,我们将牵引力定义为轮胎所能作用于地面的最大力(或者说,地面能够施加给轮胎的最大力,这两种说法都一样)。
以下是影响牵引力的因素:轮胎承重量:轮胎承重量越大,牵引力越大。
四轮独立驱动电动汽车工作原理

四轮独立驱动电动汽车工作原理嗨,朋友!今天咱们来唠唠四轮独立驱动电动汽车这个超酷的家伙的工作原理吧。
咱先来说说啥是四轮独立驱动。
简单来讲呢,就是汽车的四个轮子,每个轮子都有自己独立的动力来源,就像四个小伙伴各自带着小马达一样。
这种设计和传统汽车那种靠一个发动机然后通过复杂的传动系统来带动四个轮子的方式可不一样哦。
那这四个独立的动力是怎么来的呢?这就涉及到电机啦。
每个轮子旁边都装着一个电机,这个电机就像是轮子的专属小助手。
当你踩下加速踏板的时候,电信号就会告诉这些电机开始工作。
比如说,你想让车缓缓起步,电信号就会温柔地对电机说:“小电机,咱慢慢转起来吧。
”然后电机就开始慢悠悠地转动起来,带动着轮子开始滚动。
这些电机可聪明着呢。
它们能根据不同的路况和驾驶需求来调整自己的工作状态。
要是车在平坦的马路上直线行驶,四个电机就会协调一致,就像四个小伙伴手拉手一起向前走一样。
它们的转速基本保持相同,这样车就能稳稳地向前开啦。
但是,如果遇到了特殊情况,那可就显示出四轮独立驱动的厉害之处喽。
比如说,车要转弯的时候。
在传统汽车里,转弯的时候外侧轮子和内侧轮子走过的路程不一样,就需要差速器来帮忙调节。
可是在四轮独立驱动电动汽车里,外侧轮子的电机就会自动加快转速,内侧轮子的电机呢就会适当减慢转速。
就好像外侧的小伙伴说:“我得走快点,这样才能顺利转弯。
”内侧的小伙伴说:“那我就慢一点,配合你。
”这样车就能很顺畅地转弯啦,而且还比传统汽车转弯更精准呢。
再说说在不好的路况下吧。
如果车行驶在泥泞的路上,有一个轮子陷进去了。
在传统汽车里,可能就会有点麻烦,因为动力是通过传动系统分配的,陷进去的轮子可能会空转,白白消耗动力。
但是四轮独立驱动电动汽车就不一样啦。
其他三个轮子的电机可以正常工作,加大动力,把车从泥泞里拉出来。
就像三个小伙伴齐心协力,对陷进去的小伙伴说:“别怕,我们拉你出来。
”还有哦,在爬坡的时候。
四个电机可以一起发力,根据坡度的大小调整各自的动力输出。
汽车矢量四驱工作原理

汽车矢量四驱工作原理
汽车矢量四驱是一种先进的四轮驱动技术,它通过精确控制每
个车轮的动力输出,以实现更高的车辆稳定性、操控性和安全性。
其工作原理如下:
1. 动力分配,矢量四驱系统通过车辆动态控制单元(VDCU)监
测车辆的行驶状态,包括车速、转向角度、侧向加速度等信息,然
后根据这些数据精确控制每个车轮的动力输出。
通过电子控制单元(ECU)调节发动机输出扭矩,并通过差速器或电机控制单元(MCU)调节每个车轮的转速,使得车辆能够根据实际行驶状况进行动力分配。
2. 转向辅助,矢量四驱系统还可以通过控制每个车轮的扭矩分配,实现转向辅助功能。
当车辆转向时,系统可以通过向外侧车轮
施加更大的扭矩,从而帮助车辆更快、更稳地完成转向动作,提高
操控性能。
3. 跟踪控制,矢量四驱系统还可以实现车辆的跟踪控制功能。
通过分析车辆的横向动态特性,系统可以根据需要调节每个车轮的
动力输出,使得车辆能够更好地跟随驾驶员的指令,提高车辆的操
控性和稳定性。
总的来说,汽车矢量四驱系统通过精确控制每个车轮的动力输出,以实现更高的车辆稳定性、操控性和安全性。
它是一种先进的四轮驱动技术,可以提高车辆在各种路况下的性能表现,为驾驶员带来更加安全、舒适的驾驶体验。
四驱车的工作原理
四驱车的工作原理四驱车,顾名思义就是指具有四个驱动轮的汽车。
相比于普通的两驱车辆,四驱车在越野、恶劣路况下具有更好的通过性和牵引力。
那么,四驱车是如何实现四个驱动轮的协同工作的呢?下面我们就来详细介绍一下四驱车的工作原理。
四驱车的工作原理主要分为机械式四驱和电子式四驱两种类型。
在机械式四驱系统中,通过一系列的机械传动装置将动力传递到四个车轮上,而在电子式四驱系统中,则是通过电子控制单元对发动机输出的动力进行智能分配,以实现四个驱动轮的协同工作。
首先我们来介绍机械式四驱系统的工作原理。
在机械式四驱系统中,通常会采用传统的传动轴和差速器来实现四个驱动轮的联动。
当车辆行驶时,发动机输出的动力首先通过变速器传递到传动轴上,然后再通过传动轴传递到前后桥上。
在前后桥上,通过差速器将动力分配到左右两侧的车轮上,从而实现四个驱动轮的协同工作。
在恶劣路况下,当其中一个车轮出现打滑时,差速器会自动将更多的动力传递到另外一个车轮上,以确保车辆能够顺利通过障碍。
而在电子式四驱系统中,一般会采用多重传感器和电子控制单元来实现对动力的智能分配。
当车辆行驶时,传感器会实时监测车辆的速度、转向角度、车轮转速等参数,并将这些数据传输给电子控制单元。
电子控制单元根据这些数据进行智能分析,并通过控制多个电动执行器来实现对车辆四个驱动轮的动力分配。
这种智能分配的方式可以更加精准地控制每个车轮的牵引力,从而使车辆在复杂路况下能够更好地通过障碍。
无论是机械式四驱系统还是电子式四驱系统,它们都能够有效地提高车辆在恶劣路况下的通过性和牵引力。
然而,四驱系统也并非万无一失,它同样存在一些缺点。
首先,四驱系统会增加车辆的整体重量,从而导致燃油经济性下降。
其次,四驱系统的维护成本较高,因为它涉及到更多的传动装置和传感器。
另外,四驱系统在普通路况下并不会发挥出它的优势,反而会增加车辆的制动距离和转向半径。
总的来说,四驱车的工作原理主要分为机械式四驱和电子式四驱两种类型。
四轮驱动系统分类
很多人都以为四轮驱动的汽车可在任何地面上跑,想去哪里就去哪里。
实际上这是夸大了四驱车的能耐,就算是我的HUMMER,也不敢单独在野外行驶。
开过四驱越野车的朋友可能都知道,在恶劣的路面上,汽车差速器使得每一轴只有一个轮可以得到驱动,而且是在不停地打滑。
所以四驱车并非万能车,你必须知道四驱系统是怎么一回事。
一、四驱系统分类四轮驱动顾名思义就是汽车四个车轮都能得到驱动力。
这样一来,发动机的动力被分配给四个车轮,遇到路况不好才不易出现车轮打滑,汽车的通过能力得到相当大地改善。
四驱系统主要分成两大类:半时四驱(Part Time 4WD)和全时四驱(Full Time 4WD)。
现时,我们使用的四驱车大多是半时四驱。
只要车上有专门的两驱、四驱切换拨杆或按钮,那么,这辆就是使用半时四驱的四驱车。
半时四驱是四驱车最常使用的四驱系统,基本型号(一辆四驱车可能有4-6种型号,如Pajero的五种型号的引擎、变速箱和车内饰完全不一样,车价可相差近一倍)的三菱帕杰罗、L300、L400、基本型号的陆地巡洋舰PRADO、LC100、LC70、LC75、美国JEEP、五十铃TROOPER、RODEO、铃木VITARA、JIMNY等都使用半时四驱。
半时四驱的使用可分两种状态:一种是两驱,汽车只有两个车轮得到动力,与普通汽车没有区别;另一种则是四驱,此时汽车前后轴以50:50的比例平均分配动力。
半时四驱历史悠久,其优点是结构简单、可靠性大,加装自由轮毂(Free Wheel Hub)后更加省油。
全时四驱是使汽车四个车轮一直保持有驱动力的四驱系统。
若要细分全时四驱系统,可分成固定扭矩分配(前后50:50比例分配)和变扭矩分配(前后动力分配比例可变)两大类。
全时四驱也有很长的历史,可靠性更大,但其耗油量较大。
二、两种四驱系统比较半时四驱靠操作分动器实现两驱与四驱的切换。
由于分动器内没有中央差速器,所以半时四轮驱动的汽车不能在硬地面(铺装路面)上使用四驱,特别是在弯道上不能顺利转弯。
几种四驱车工作原理
几种四驱车工作原理
1. 四驱车的机械连接式四驱系统:这种系统通过一个传输箱将动力从发动机传递到前后两个传动轴上。
传输箱中有一个差速器,可将动力平均地分配给前后两个轴,并向每个轴上的驱动轮提供相同的扭矩。
这种系统的工作原理类似于普通的后驱车辆,只是额外为前轴提供了驱动力。
2. 四驱车的全时四驱系统:全时四驱系统通过一个中央差速器和一套附加的传动装置来分配驱动力。
中央差速器能够根据不同驾驶条件自动调整前后轴上的扭矩分配比例,以确保最佳的牵引力。
这种系统通常以自动模式工作,但也可以选择手动模式来锁定前后轴的扭矩分配。
3. 四驱车的电子控制式四驱系统:这种系统使用电子控制单元(ECU)来监测车辆的驾驶动态和路况,并根据需要调整前后轴上的扭矩分配。
ECU可以根据车轮的转速和滑移情况,实时调整扭矩分配,以提供最佳的牵引力和稳定性。
这种系统通常与车辆的稳定控制系统集成在一起,以提供更高的驾驶安全性。
4. 四驱车的气压控制式四驱系统:这种系统使用气压控制装置来控制四个车轮上的扭矩分配。
气压控制装置可以根据驾驶员的需求和路况,调整每个车轮上的扭矩分配比例,以提供最佳的牵引力和操控性能。
这种系统通常适用于越野车辆,在复杂的路况下提供更好的悬挂和驾驶性能。
请注意,这只是几种常见的四驱车工作原理,实际上还有其他不同的四驱系统,每种系统的工作原理和操作方式都有所不同。
汽车四驱系统原理全解读
汽车四驱系统原理全解读四驱基础现在的四驱系统主要分成分时四驱、适时四驱、全时四驱三大类。
我们先从最早的四驱系统说起——分时四驱。
分时四驱什么是分时四驱?就是你想4驱就4驱,想2驱就2驱。
通过启闭差速器来实现驱动模式切换,这是最简单、也是最早的四驱系统。
分时四驱优点是结构简单,稳定性高,坚固耐用;但缺点是必须车主手动操作,有时还需要停车操作,这样不仅操作起来比较麻烦,而且当陷入恶劣路况时不能迅速反应,可能错过脱困的最佳时机,所以当要进入恶劣路况时,要提前切入四驱模式。
需要注意的是,分时四驱没有中央差速器,在摩擦力较好的铺装路面上使用四驱系统,会因为前后轴的转速差导致转弯不畅,所以在铺装路面上一定要切回到两驱模式。
代表车型:铃木吉姆尼、JEEP牧马人等适时四驱适时四驱只在合适的时候才会切换到四驱模式,什么时候合适一般由电脑控说了算。
这种驱动模式下,动力通常传递至一个驱动轴,当车轮打滑时,中央差速器锁止,此时会有一部分动力分配给另一个驱动轴。
但适时四驱缺点是要在打滑之后才会介入,所以它的响应速度较慢。
而且,由于最多只有50%的动力传递给第二驱动轴,这使它在主动安全控制方面,没有全时四驱的调整范围那么大,所以这种四驱系统跑跑乡下泥路还行,一旦遇到难度大一些的越野路段就无能为力了。
不过相比于全时四驱,适时四驱的结构简单而且省油,也有利于降低成本;相对于分时四驱,适时四驱则操作简单,作为只需要轻越野的城市SUV的四驱系统还是很合适的。
代表车型:CR-V、RAV4等。
全时四驱全时四驱是指汽车在行驶过程中,发动机输出扭矩以一定的比例分配到前后轮,四个轮子都能获得驱动力,具有很好的越野性与操控性。
全时四驱没有两驱和四驱之间切换的响应时间,所以相对而言会有更优异的通过性和安全性。
理论上,全时四驱是将发动机的动力输出分配到四个车轮上,所以能获得更为平稳的牵引力,因此车辆的可控性、通过性以及稳定性均会得到提升。
车辆在复杂路面行驶时,驾驶员能够更好的控制每一个行迹动作。
四轮驱动发展内容
四轮驱动发展内容近年来,四轮驱动技术在汽车行业中得到了广泛的应用和发展。
四轮驱动系统提供了全面的车辆控制能力,使得车辆在安全性、操控性以及适应性方面都有了显著的提升。
以下是四轮驱动发展的一些核心内容:1. 动力传输系统:四轮驱动的核心在于动力传输。
随着技术的发展,汽车制造商采用了先进的动力分配技术,能够将动力按需分配到四个车轮上。
传统的四轮驱动系统倾向于平均分配动力,而现代的四轮驱动系统则可以根据实际情况智能地调整动力输出,以提供更好的操控性和稳定性。
2. 涉及离合器技术:四轮驱动离合器技术的发展也为驾驶员提供了更好的选择。
现代四轮驱动车辆通常配备有离合器控制系统,可以根据路况和驾驶需求来调整驱动模式。
当车辆需要额外的牵引力时,离合器可以将动力发送到需要的车轮上,以确保车辆保持良好的牵引力。
3. 悬挂系统改进:四轮驱动车辆的悬挂系统也得到了改进,以适应不同的路况和驾驶需求。
一些高档四轮驱动车辆采用可调节悬挂系统,可以根据驾驶员的偏好和路况来调整车身高度和车辆的稳定性。
这些改进使得四轮驱动车辆在崎岖的地形或恶劣的天气条件下更具有适应性。
4. 智能控制系统:随着科技的进步,四轮驱动车辆配备了智能控制系统,可以根据实时数据和驾驶员的需求做出决策。
这些系统不仅仅局限于牵引力在各轮之间的分配,还可以自动调整制动力、转向力和电子稳定控制等参数。
智能控制系统大大提高了车辆的操控性和驾驶安全性。
四轮驱动技术的发展使得汽车在各方面都有了显著的提升。
动力传输系统、离合器技术、悬挂系统改进和智能控制系统的进步都为驾驶员提供了更好的驾驶体验和更高的安全性能。
预计未来四轮驱动技术还会不断发展,为汽车行业带来更多的创新和突破。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
浅谈汽车四轮驱动任建军汽车工作室说到全轮驱动,总能使人们想起那些身材魁梧、威猛超群的越野车。
的确,全轮驱动的出现就是为了针对恶劣路况,征服那些两只车轮无法通过的险峻地形。
最初,全轮驱动是纯种越野车的专门配备。
但随着汽车工业的发展,以及人们对于汽车文化更加深入的认识,越来越多的车辆采用了全轮驱动系统。
对于本篇文章中的主角“SUV”来说,全轮驱动在通常意义上可以理解为四轮驱动(因为绝大部分SUV在正常行驶中,都是四只车轮与地面保持接触)。
在一般人看来,所谓的“四轮驱动”无非就是让四只车轮同时旋转,驱动车辆。
在汽车工业十分发达的今天,想做到这一步并不困难,当今世界上绝大多数汽车生产厂商都制造出了四轮驱动的车辆。
虽然有如此之多的车辆能够实现四轮驱动,虽然都被称为“四轮驱动”,但实际上,不同车型之间由于驱动系统的结构差异,最终导致其实际行驶特性大相径庭。
也许有人会问,不都是“四轮驱动”吗?为什么会有如此巨大的差别?针对这些问题,本篇文章将会对此进行详细的分析与解答。
上图:给差速器加上锁真的就这么神奇吗?为什么很多车辆需要四轮驱动呢?根本原因就在于,通常情况下,四轮驱动比起两轮驱动,具有更高的通过性能(所谓通过性能就是指车辆通过复杂地形的能力)。
但是,无论车辆采用何种驱动方式,都无法避免一种情况的发生,这就是:驱动轮失去行驶附着力。
当车辆行驶于复杂路况时,这种现象时常发生。
对于一辆普通的两驱车来说,一旦两个驱动轮中的任何一个车轮无论何种原因而失去行驶附着力的话,理论上讲,在不借助任何外力的情况下,车辆将无法继续前进。
也许此时您会问道“不是两轮驱动么?此时的另一个驱动轮为什么不能驱动车辆继续前进呢?”如果要解答这个问题,必须从车轮之间的连接方式说起。
车辆进行直线行驶时,两侧车轮的行驶距离是完全相同的,并无转速差异。
但在转弯时,如果继续保持这种行驶状态,将会对车辆造成严重的损伤,并且无法顺利通过弯道。
原因是,车辆在弯道行驶时,外侧车轮行驶的距离要大于内侧车轮,由于通过的时间相等,所以两侧车轮之间存在转速差,所以不能采用刚性连接。
差速器的出现巧妙地解决了这一问题,它安装于两侧驱动轮之间,并与传动轴相连接,发动机输出的动力通过它传递给两侧驱动轮。
当车辆转弯时,差速器可以自动调节两侧车轮转速,从而使车辆平稳前进。
差速器的差速原理是:弯道行驶时,车辆两侧驱动轮所受到的转动阻力是不同的,差速器的实际功能就在于消除两侧车轮的阻力差,也就是说,只有两侧驱动轮出现阻力差,差速器才会工作,并且差速器的“差速程度”与“阻力差”是成正比的。
回到刚才的例子:如果一辆普通的两驱车在越野时,一个驱动轮紧贴地面,而另一侧的驱动轮悬空,此时由于两侧驱动轮的理论阻力差达到极限(一边是100%,一边是0),所以差速器就会将发动机传送的几乎全部动力都传递给失去路面附着力的驱动轮,以消除阻力差,而另一侧路面附着良好的驱动轮几乎不会被传递任何动力。
在这种情况下,由于车辆的驱动力都会从失去附着力的驱动轮流失,所以造成车辆无法前进。
上图:转弯时内外侧车轮的转速差促使了差速器的发明。
虽然差速器的发明对于提高车辆的公路行驶性能做出了巨大的贡献,但无可否认的一点是,对于越野行驶,差速器的“差速”只会影响车辆的通过性能。
为了解决这一问题,工程师们发明了很多种能够限制差速器差速功能,从而防止驱动轮打滑的装置(以下简称“限滑装置”)。
最根本的解决方案就是:差速锁。
由于车辆在复杂路况行驶时,驱动轮所受到的阻力差是很大的,所以才造成了车轮的打滑。
差速锁的作用就是将差速器实现差速功能的组件完全锁住,从而彻底消除了差速器的差速功能,换句话说,就是将差速器与两侧的半轴通过牙嵌式离合器(或其他能够阻止差速器当中部件转动的装置)刚性连接起来,使之成为一个整体。
这样就保证了车辆无论遇到何种行驶状态,两侧驱动轮的转速都是相同的,此时的动力传递并不针对于两侧驱动轮,而是针对于整个驱动轴。
这样的优点在于,两侧车轮的实际输出扭矩比与其所受阻力比是完全相同的(例如两侧驱动轮受到的阻力比是3:7,那么理论上讲,受到阻力小的一侧驱动轮只需30%的扭矩,而其余的70%则分配给阻力较大的一侧车轮)。
当出现前文举例的那种一侧驱动轮失去附着力的极端情况时,另一侧路面附着力良好的车轮能够获得相当于正常行驶200%的扭矩输出,因为此时差速锁将正常情况下平均分配于两侧驱动轮的动力都作用于这个拥有强大附着力的驱动轮,从而大大增强了车辆的通过能力。
机械式差速锁的接通方式也分为手动控制和自动控制两种。
自动控制的机械式差速锁由于技术原因导致在一些特殊路况,例如紧急转向时会对车辆的行驶造成一定干扰,所以现在很少有车辆使用这种技术。
而手动差速锁由于其强大的可靠性使之成为纯种越野车的必备装置,这虽然不是什么先进技术,但却仍然是迄今为止最为可靠、最有效的提高车辆越野性能的驱动系统辅助装置。
虽然机械式差速锁特点鲜明,但其弱点同样限制了它的普及。
手动机械式差速锁只能实现0或100%的锁止系数,缺乏在其间的连续变化。
接通差速锁后,由于消除了差速器的差速功能,车辆必须保持直线行驶,所以只能在驱动轮附着力状况差异较大的情况下使用,并且在驶回附着力良好的路况时必须解除锁定,否则将会使车辆失去转弯行驶的能力,加速车辆磨损,并发生危险。
另外一点就是,使用手动控制差速锁对于驾驶者的驾驶技术要求较高。
对于一辆并不十分追求越野性能的SUV来说,机械式差速锁显然并不适合它们。
上图:颇受越野迷追捧的ARB系列差速锁,就是采用的牙嵌式锁死装置。
前文已经提到,当两侧驱动轮之间存在很大的阻力差时,就会造成车轮打滑。
对此,工程师们想到:如果给受到阻力较小的车轮也施加阻力的话,是不是同样可以达到“限滑”目的呢?答案是肯定的。
针对这一思路,牵引力控制系统随之应运而生。
它的工作原理就是:这套系统能够时刻监测各个驱动轮的转速,当系统监测到驱动轮之间出现较大转速差时,会自动对超过安全转速(也就是打滑)的车轮施加制动力(制动系统就是阻力的来源),从而减小了阻力差,给予了附着力较强车轮更大的动力,驱动车辆前进。
其实这一过程可以形象地理解为:牵引力控制系统自动对打滑车轮实施制动,从而把牵引力通过差速器自动传送至附着力良好的车轮上,驱动车辆前进。
这套系统的优点在于自动化程度高,驾驶员无需进行任何操纵,这一过程完全由电脑控制。
比较于机械式差速锁,牵引力控制系统的灵活性更强,它能够针对各种路况进行自动控制,适应面要比机械式差速锁更宽泛,而且对于公路行驶的安全性也能提供一定帮助。
其实有很多先进的技术都是从牵引力控制系统发展而来,例如ESP电子稳定程序,以及路虎的HDC陡坡缓降控制系统等等,基本思路都是类似的。
牵引力控制系统的另一个优点是:制造成本相对低廉。
这些优点使得牵引力控制系统迅速普及。
这套系统通常被简称为“TCS”,当然不同的汽车制造商也给其起了不同的名字,例如奥迪和大众称其为“EDS/EDL”,丰田称其为“A-TRC”,路虎称其为“ETC”,梅塞德斯奔驰则把它命名成“4-ETS”等等……虽然名称不同,但实质却是完全相同的。
上图:使用了ETC的路虎揽胜。
牵引力控制系统的优点固然明显,但从实际角度来看,这套系统并不十分适合越野行驶。
原因是,这套系统虽然理论上讲可以把动力从附着力较差的驱动轮传递至附着力较高的驱动轮,但这毕竟是理论,实际情况并非如此。
当出现极限情况时,在制动瞬间附着力较差的一侧车轮停止转动,而另一侧附着力较高的车轮会以相当于常规驱动速度的两倍旋转(这是由于差速器的工作原理决定的),虽然此时此驱动轮的输出功率为常规驱动功率的两倍,但由于转速也增加为常规转速的两倍,根据“功率=力*速度(P=F.v)”,所以此时的输出扭矩与原先保持常规转速时的输出扭矩是相同的(并不像机械式差速锁那样可以达到常规的200%)。
同时由于对打滑车轮实施制动会将很大一部分发动机输出的动能转化为制动系统的热能。
当出现前文所叙述的极限情况时,牵引力控制系统工作的瞬间会消耗大约75%的动能。
也就意味着实际上附着力良好的车轮最多只能获得25%的扭矩输出。
很显然,这样的输出扭矩并不足以从根本上提高车辆的通过性能,最多只能用于在打滑的一瞬间“脱困”。
而且由于牵引力控制系统只能在驱动轮出现较大转速差的一瞬间工作,而且会在较大程度上消耗输出动能,另外就是此系统的反应速度较慢,并且存在滞后,等等原因所以导致车辆的行驶连贯性较差,当遇到长距离恶劣路况行驶时(例如攀登一个很长的泥泞陡坡),牵引力控制系统会持续不断地工作,除了造成车辆持续行驶动力不足以外,严重的情况甚至会导致制动系统失效或烧毁。
这种现象在爬坡时更为明显。
由此可见,牵引力控制系统在极限状态下的可靠性是较差的。
个人认为,它对于车辆越野性能的提高并不能起到较大的帮助,属于“越野鸡肋”。
所以在SUV上,牵引力控制系统一般并不单独存在,而是作为配合其他限滑装置的辅助手段,协同工作。
除此以外,还有两类纯机械限滑装置,分别是黏性耦合器和扭矩感应自锁式差速器。
先说说前者,对于一些不需要较强越野性能的SUV来说,100%锁定的机械式差速锁并不适合它们,于是工程师们发明了黏性耦合装置。
黏性耦合器中平行装有很多片间距很小的摩擦片,相邻的两片分别安装于耦合器外壳和深入其中的传动轴上。
粘性耦合器内部充满了硅油。
传动轴与外壳分别连接于差速器两端的两个半轴上,当车辆直线行驶或进行正常的弯道行驶时,由于摩擦片之间只发生较小的相对转动,黏性耦合器并不会限制差速器的工作。
但当两侧驱动轮的转速差超过某一临界值(这取决于硅油的黏性)时,由于内部的硅油会被高速搅动,膨胀并产生黏性,使得黏性耦合器形成类似锁住的现象。
这样两侧驱动轮的阻力达到新的平衡。
附着力较大的一侧驱动轮获得动力,得以继续驱动车辆前进。
当两侧驱动轮之间的转速差减小至临界值以下时,硅油温度降低,黏性耦合器不再产生“黏性”,差速器恢复工作,车辆正常行驶。
上图:粘性耦合器结构示意图再说说扭矩感应自锁式差速器。
扭矩感应自锁式差速器也被称为“托森差速器”,这个名字其实就是“TORQUE SENSITIVE(扭矩感应)”的缩写“TORSEN”。
这种差速器内部是由蜗轮蜗杆组成的。
在常规行驶时,蜗杆齿轮不影响半轴输出速度的不同。
如车辆向左转弯时,右侧驱动轮的旋转速度比差速器快,而左侧驱动轮的旋转速度则要低于差速器,左右速度不同的蜗轮能够严密地匹配同步啮合齿轮。
此时蜗轮蜗杆并没有锁止,因为扭矩是从蜗轮到蜗杆齿轮。
例如一侧驱动轮打滑时,蜗轮蜗杆组件发挥作用,此时快速旋转的一侧半轴将驱动同侧蜗杆,并通过同步啮合齿轮驱动另一侧蜗杆,此时蜗轮蜗杆特性发挥作用。
当蜗杆驱动蜗轮时,它们就会锁止,两侧蜗杆实现互锁,保证了非打滑驱动轮具有足够的牵引力。